

Abstract
M-estimation, or estimating equation, methods are widely applicable for point estimation and asymptotic inference. In this paper, we present an R package that can find roots and compute the empirical sandwich variance estimator for any set of user-specified, unbiased estimating equations. Examples from the M-estimation primer by Stefanski and Boos (2002) demonstrate use of the software. The package also includes a framework for finite sample, heteroscedastic, and autocorrelation variance corrections, and a website with an extensive collection of tutorials.
Keywords: empirical sandwich variance estimator, estimating equations, M-estimation, robust statistics, R
1. Introduction
M-estimation methods are general class of statistical procedures for carrying out point estimation and asymptotic inference (Boos and Stefanski 2013). Also known as estimating equation or estimating function methods, M-estimation was originally developed in studying the large sample properties of robust statistics (Huber and Ronchetti 2009). The general result from M-estimation theory states that if an estimator can be expressed as the solution to an unbiased estimating equation, then under suitable regularity conditions the estimator is asymptotically Normal and its asymptotic variance can be consistently estimated using the empirical sandwich estimator. Many estimators can be expressed as solutions to unbiased estimating equations; thus M-estimation has extensive applicability. The primer by Stefanski and Boos (2002) demonstrates a variety of statistics which can be expressed as M-estimators, including the popular method of generalized estimating equations (GEE) for longitudinal data analysis (Liang and Zeger 1986).
Despite the broad applicability of M-estimation, existing statistical software packages implement M-estimators specific to particular forms of estimating equations such as GEE. This paper introduces the package geex for R (R Core Team 2016), which can obtain point and variance estimates from any set of unbiased estimating equations. The analyst translates the mathematical expression of an estimating function into an R function that takes unit-level data and returns a function in terms of parameters. The package geex then uses numerical routines to compute parameter estimates and the empirical sandwich variance estimator.
This paper is outlined as follows. Section 2 reviews M-estimation theory and outlines how geex translates mathematical expressions of estimating functions into R syntax. Section 3 shows several examples with increasing complexity: three examples from Stefanski and Boos (2002) (hereafter SB), GEE, and a doubly robust causal estimator (Lunceford and Davidian 2004). All of the SB examples and several more are available at the package website (https://bsaul. github.io/geex/). Section 4 compares geex to existing R packages. Section5demonstrates the variance modification feature of geex with examples of finite sample corrections and autocorrelation consistent variance estimators for correlated data. Section6concludes with a brief discussion of the software’s didactic utility and pragmatic applications.
2. From M-estimation math to code
In the basic set-up, M-estimation applies to estimators of the p×1 parameter θ = (θ1, θ2,…, θp)T
which can be obtained as solutions to an equation of the form
| (1) |
where O1,…, Om are m independent and identically distributed (iid) random variables, and the function returns a vector of length p and does not depend on i or m. See SB for the case where the Oi are independent but not necessarily identically distributed. The root of Equation 1 is referred to as an M-estimator and denoted by M-estimators can be solved for analytically in some cases or computed numerically in general. Under certain regularity conditions, the asymptotic properties of θˆ can be derived from Taylor series approximations, the law of large numbers, and the central limit theorem (Boos and Stefanski 2013, sec. 7.2). In brief, let θ0 be the true parameter value defined by where F is the distribution function of O. Let and B Then under suitable regularity assumptions, θˆ is consistent and asymptotically Normal, i.e.,
where V (θ0) = A(θ0)−1B(θ0){A(θ0)−1}T. The sandwich form of V (θ0) suggests several possible large sample variance estimators. For some problems, the analytic form of V (θ0) can be derived and estimators of θ0 and other unknowns simply plugged into V (θ0). Alternatively, V (θ0) can be consistently estimated by the empirical sandwich variance estimator, where the expectations in A(θ) and B(θ) are replaced with their empirical counterparts. Let and
The empirical sandwich estimator of the variance of is
| 2 |
The geex package provides an application programming interface (API) for carrying out M- estimation. The analyst provides a function, called estFUN, corresponding to (Oi, θ) that maps data Oi to a function of θ. Numerical derivatives approximate so that evaluating Σˆ is entirely a computational exercise. No analytic derivations are required from the analyst.
Consider estimating the population mean θ = E[Yi] using the sample mean of m iid random variables Y1,…, Ym. The estimator can be expressed as the solution to the following estimating equation:
which is equivalent to solving Equation 1 where Oi = Yi and (Oi, θ) = Yi − θ. An estFUN is a translation of into an R function whose first argument is data and returns a function whose first argument is theta. An estFUN corresponding to the estimating equation for the sample mean of Y is:
meanFUN <- function(data){ function(theta){ data$Y - theta } } .
The geex package exploits R as functional programming language: functions can return and modify other functions (Wickham 2014, ch. 10). If an estimator fits into the above framework, then the user need only specify estFUN. No other programming is required to obtain point and variance estimates. The remaining sections provide examples of translating ψ into an estFUN.
3. Calculus of M-estimation examples
The geex package can be installed from CRAN with install.packages(“geex”). The first three examples of M-estimation from SB are presented here for demonstration. For these examples, the data are Oi = {Y1i, Y2i} where Y1 ∼ N (5, 16) and Y2 ∼ N (2, 1) for m = 100 and are included in the geexex dataset. Another example applies GEE, which is elaborated on in Section5to demonstrate finite sample corrections. Lastly, a doubly-robust causal estimator of a risk difference introduces how estimating functions from multiple models can be stacked using geex.
3.1. Example 1: Sample moments
The first example estimates the population mean (θ1) and variance (θ2) of Y1. Figure 1 shows the estimating equations and corresponding estFUN code. The solution to the estimating equations in Figure 1 are the sample mean and sample variance The primary geex function is m_estimate, which requires two inputs: estFUN (the func- tion), data (the data frame containing Oi for i = 1,…, m).The package defaults to rootSolve::multiroot (Soetaert and Herman 2009; Soetaert 2009) for estimating the roots of Equation 1, though the solver algorithm can be specified in the root_control argument. Starting values for rootSolve::multiroot are passed via the root_control argument; e.g.,
Figure 1:
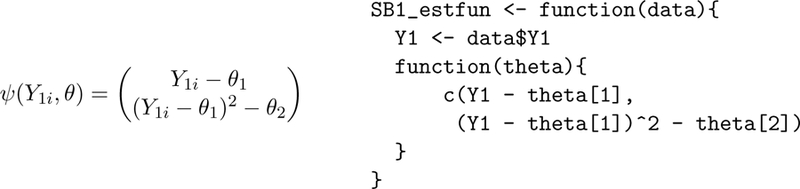
Estimating equations and estFUN for example 1.
R> library(“geex”) R> results <- m_estimate R+ estFUN = SB1_estfun, R+ data = geexex, R+ root_control = setup_root_control(start = c(1, 1)))
The m_estimate function returns an object of the S4 class geex, which contains an estimates slot and vcov slot for and , respectively. These slots can be accessed by the functions coef (or roots) and vcov. The point estimates obtained for θ1 and θ2 are analogous to the base R functions mean and var (after multiplying by m − 1/m for the latter). SB gave a closed form for A(θ0) (an identity matrix) and B(θ0) (not shown here) and suggest plugging in sample moments to compute B( ). The maximum absolute difference between either the point or variance estimates is 4e-11, thus demonstrating excellent agreement between the numerical results obtained from geex and the closed form solutions for this set of estimating equations and data.
3.2. Example 2: Ratio estimator
This example calculates a ratio estimator (Figure 2) and illustrates the delta method via M-estimation. The estimating equations target the means of Y1 and Y2, labelled θ1 and θ2, as well as the estimand θ3 = θ1/θ2.
Figure 2:
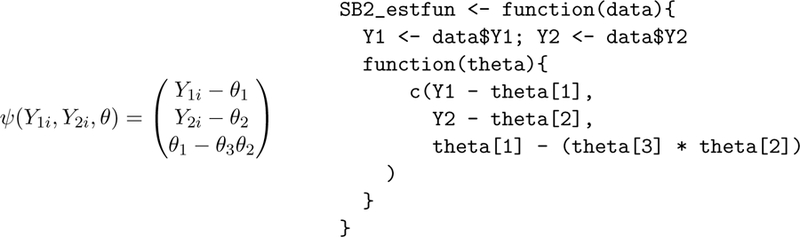
Estimating equations and estFUN for example 2.
The solution to Equation 1 for this function yields , where denotes the sample mean of Yj1,…, Yjm for j = 1, 2.
SB gave closed form expressions for A(θ0) and B(θ0), into which we plug in appropriate estimates for the matrix components and compare to the results from geex. The point estimates again show excellent agreement (maximum absolute difference 4.4e-16), while the covariance estimates differ by the third decimal (maximum absolute difference 2e-12).
3.3. Example 3: Delta method continued
This example extends Example 1 to again illustrate the delta method. The estimating equations target not only the mean (θ1) and variance (θ2) of Y1, but also the standard deviation (θ3) and the log of the variance (θ4) of Y1.
SB again provided a closed form for A(θ0) and B(θ0), which we compare to the geex results. The maximum absolute difference between geex and the closed form estimates for both the parameters and the covariance is 3.8e-11.
3.4. Example 4: Generalized estimating equations
In their seminal paper,Liang and Zeger(1986) introduced generalized estimating equations (GEE) for the analysis of longitudinal or clustered data. Let m denote the number of independent clusters. For cluster i, let ni be the cluster size, Yi be the ni × 1 outcome vector, and Xi be the ni × p matrix of covariates. Let µ(Xi; θ) = E[Yi|Xi; θ] and assume µ(Xi; θ) = g−1(Xiθ), where g is some user-specified link function. The generalized estimating equations are:
| 3 |
where Oi = {Yi, Xi} and Di = ∂µ(Xi; θ)/∂θ. The covariance matrix is modeled by Vi = where the matrix R(α) is the “working” correlation matrix. The example below uses an exchangeable correlation structure with off-diagonal elements α. The matrix Wi is a diagonal matrix with elements containing ∂2µ(Xi; θ)/∂θ2. Equation 3 can be translated into an estFUN as:
R> gee_estfun <function(data, formula, family){
R+ X <model.matrix(object = formula, data = data)
R+ Y <model.response(model.frame(formula = formula, data = data))
R+ n <nrow(X)
R+ function(theta, alpha, psi){
R+ mu <drop(family$linkinv(X %*% theta))
R+ Dt <crossprod(X, diag(mu, nrow = n))
R+ W <diag(family$variance(mu), nrow = n)
R+ R <matrix(alpha, nrow = n, ncol = n)
R+ diag(R) <1
R+ V <psi * (sqrt(W) %*% R %*% sqrt(W))
R+ Dt %*% solve(V, (Y mu))
R+ }
R+ }
This estFUN treats the correlation parameter α and scale parameter as fixed, though some estimation algorithms use an iterative procedure that alternates between estimating θ0 and these parameters. By customizing the root finding function, such an algorithm can be implemented using geex [see vignette(“v03_root_solvers”) for more information].
We use this example to compare covariance estimates obtained from the gee function (Carey 2015), and so do not estimate roots using geex. To compute only the sandwich variance estimator, set compute_roots = FALSE and pass estimates of θ0 via the roots argument. For this example, estimated roots of Equation 3, i.e., , and estimates for α and are extracted from the object returned by gee. This example shows that an estFUN can accept additional arguments to be passed to either the outer (data) function or the inner (theta) function. Unlike previous examples, the independent units are clusters (types of wool), which is specified in m_estimate by the units argument. By default, m equals the number of rows in the data frame.
R> g <gee::gee(breaks~tension, id=wool, data=warpbreaks, R+ corstr=“exchangeable”) R> results <m_estimate( R+ estFUN = gee_estfun, R+ data = warpbreaks, R+ units = “wool”, R+ roots = coef(g), R+ compute_roots = FALSE, R+ outer_args = list(formula = breaks ~ tension, R+ family = gaussian()), R+ inner_args = list(alpha = g$working.correlation[1,2], R+ psi = g$scale))
The maximum absolute difference between the estimated covariances computed by gee and geex is 2.7e-09.
3.5. Example 5: Doubly robust causal effect estimator
Estimators of causal effects often have the form:
| 4 |
where ν are parameters in nuisance model(s), such as a propensity score model, and β are the target causal parameters. Even when ν represent parameters in common statistical models, deriving a closed form for a sandwich variance estimator for based on Equation 4 may involve tedious and error-prone derivative and matrix calculations (e.g., see the appendices of Lunceford and Davidian 2004, and Perez-Heydrich, Hudgens, Halloran, Clemens, Ali, and Emch (2014)). In this example, we show how an analyst can avoid these calculations and compute the empirical sandwich variance estimator using geex.
Lunceford and Davidian (2004) review several estimators of causal effects from observational data. To demonstrate a more complicated estimator involving multiple nuisance models, we implement the doubly robust estimator:
| 5 |
This estimator targets the average causal effect, ∆ = E[Y (1) − Y (0)], where Y (z) is the potential outcome for an observational unit had it been exposed to the level z of the binary exposure variable Z. The estimated propensity score, is the estimated probability that unit i received z = 1 and is an outcome regression model with baseline covariates Xi and estimated paramaters for the subset of units with Z = z. This estimator has the property that if either the propensity score model or the outcome models are correctly specified, then the solution to Equation 5 will be a consistent and asymptotically Normal estimator of ∆.
This estimator and its estimating equations can be translated into an estFUN as:
R> dr_estFUN <function(data, models){
R+
R+ Z <data$Z
R+ Y <data$Y
R+
R+ Xe <grab_design_matrix(
R+ data = data,
R+ rhs_formula = grab_fixed_formula(models$e))
R+ Xm0 <grab_design_matrix(
R+ data = data,
R+ rhs_formula = grab_fixed_formula(models$m0))
R+ Xm1 <grab_design_matrix(
R+ data = data,
R+ rhs_formula = grab_fixed_formula(models$m1))
R+
R+ e_pos <1:ncol(Xe)
R+ m0_pos <(max(e_pos) + 1):(max(e_pos) + ncol(Xm0))
R+ m1_pos <(max(m0_pos) + 1):(max(m0_pos) + ncol(Xm1))
R+
R+ e_scores <grab_psiFUN(models$e, data)
R+ m0_scores <grab_psiFUN(models$m0, data)
R+ m1_scores <grab_psiFUN(models$m1, data)
R+
R+ function(theta){
R+ e <plogis(Xe %*% theta[e_pos])
R+ m0 <Xm0 %*% theta[m0_pos]
R+ m1 <Xm1 %*% theta[m1_pos]
R+ rd_hat <(Z*Y (Z e) * m1) / e -
R+ ((1 Z) * Y (Z e) * m0) / (1 e)
R+ c(e_scores(theta[e_pos]),
R+ m0_scores(theta[m0_pos]) * (Z == 0),
R+ m1_scores(theta[m1_pos]) * (Z == 1),
R+ rd_hat theta[length(theta)])
R+ }
R+ }
This estFUN presumes that the user will pass a list containing fitted model objects for the three nuisance models: the propensity score model and one regression model for each treatment group. The functions grab_design_matrix and grab_fixed_formula are geex utilities for extracting relevant pieces of a model object. The function grab_psiFUN converts a fitted model object to an estimating function; for example, for a glm object, grab_psiFUN uses the data to create a function of theta corresponding to the generalized linear model score function. The m_estimate function can be wrapped in another function, wherein nuisance models are fit and passed to m_estimate.
R> estimate_dr <function(data, propensity_formula, outcome_formula){
R+ e_model <glm(propensity_formula, data = data, family = binomial)
R+ m0_model <glm(outcome_formula, subset = (Z == 0), data = data)
R+ m1_model <glm(outcome_formula, subset = (Z == 1), data = data)
R+ models <list(e = e_model, m0 = m0_model, m1 = m1_model)
R+ nparms <sum(unlist(lapply(models, function(x) length(coef(x))))) + 1
R+
R+ m_estimate(
R+ estFUN = dr_estFUN,
R+ data = data,
R+ root_control = setup_root_control(start = rep(0, nparms)),
R+ outer_args = list(models = models))
R+ }
The following code provides a function to replicate the simulation settings of Lunceford and Davidian (2004).
R> library(“mvtnorm”)
R> tau_0 <c(−1, −1, 1, 1)
R> tau_1 <tau_0 * −1
R> Sigma_X3 <matrix(
R+ c(1, 0.5, −0.5, −0.5,
R+ 0.5, 1, −0.5, −0.5,
R+ −0.5, −0.5, 1, 0.5,
R+ −0.5, −0.5, 0.5, 1), ncol = 4, byrow = TRUE)
R>
R> gen_data <function(n, beta, nu, xi){
R+ X3 <rbinom(n, 1, prob = 0.2)
R+ V3 <rbinom(n, 1, prob = (0.75 * X3 + (0.25 * (1 X3))))
R+ hold <rmvnorm(n, mean = rep(0, 4), Sigma_X3)
R+ colnames(hold) <c(“X1”, “V1”, “X2”, “V2”)
R+ hold <cbind(hold, X3, V3)
R+ hold <apply(hold, 1, function(x){
R+ x[1:4] <x[1:4] + tau_1^(x[5]) * tau_0^(1 x[5])
R+ x
R+ })
R+ hold <t(hold)[, c(“X1”, “X2”, “X3”, “V1”, “V2”, “V3”)]
R+ X <cbind(Int = 1, hold)
R+ Z <rbinom(n, 1, prob = plogis(X[, 1:4] %*% beta))
R+ X <cbind(X[, 1:4], Z, X[, 5:7])
R+ data.frame(
R+ Y = X %*% c(nu, xi) + rnorm(n),
R+ X[ , −1])
R+ }
To show that estimate_dr correctly computes DR, the results from geex can be compared to computing DR “by hand” for a simulated dataset.
R> dt <gen_data(n = 1000, R+ beta = c(0, 0.6, −0.6, 0.6), R+ nu = c(0, −1, 1, −1, 2), R+ xi = c(−1, 1, 1)) R> geex_results <estimate_dr(dt, Z ~ X1 + X2 + X3, Y ~ X1 + X2 + X3) R> e <predict(glm(Z ~ X1 + X2 + X3, data = dt, family = “binomial”), R+ type = “response”) R> m0 <predict(glm(Y ~ X1 + X2 + X3, data = dt, subset = Z==0), R+ newdata = dt) R> m1 <predict(glm(Y ~ X1 + X2 + X3, data = dt, subset = Z==1), R+ newdata = dt) R> del_hat <with(dt, mean( (Z * Y (Z e) * m1) / e)) - R+ with(dt, mean(((1 Z) * Y (Z e) * m0) / (1 e)))
The maximum absolute difference between coef(geex_results)[13] and del_hat is 1.4e-09.
4. Comparison to existing software
The above examples demonstrate the basic utility of the geex package and the power of R’s functional programming capability. The gmm package (Chauss´ 2010) computes generalized methods of moments and generalized empirical likelihoods, estimation strategies similar to M-estimation, using user-defined functions like geex. To our knowledge, geex is the first R package to create an extensible API for any estimator that is the solution to estimating equations in the form of Equation 1. Existing R packages such as gee (Carey 2015), geepack (Halekoh, Hojsgaard, and Yan 2006), and geeM (McDaniel, Henderson, and Rathouz 2013) solve for parameters in a GEE framework. Other packages such as fastM (Duembgen, Nord-hausen, and Schuhmacher 2014) and smoothmest (Hennig 2012) implement M-estimators for specific use cases.
For computing a sandwich variance estimator, geex is similar to the popular sandwich package (Zeileis 2004, 2006), which computes the empirical sandwich variance estimator from modelling methods such as lm, glm, gam, survreg, and others. For comparison to the exposition herein, the infrastructure of sandwich is explained in Zeileis (2006). Advantages of geex compared to sandwich include: (i) for custom applications, a user only needs to specify a single estFUN function as opposed to both the bread and estfun functions; (ii) as demonstrated in the examples above, the syntax of an estFUN may closely resemble the mathematical expression of the corresponding estimating function; (iii) estimating functions from multiple models are easily stacked; and (iv) point estimates can be obtained. The precision and computational speed of point and variance estimation in geex, however, depends on numerical approximations rather than analytic expressions.
To compare sandwich and geex, consider estimating for the θ parameters in the following simple linear model contained in the geexex data: Y4 = θ1+θ2X1+θ3X2+s, where s ∼ N (0, 1). The estimating equation for θ in this model can be expressed in an estFUN as:
R> lm_estfun <function(data){
R+ X <cbind(1, data[[“X1”]], data[[“X2”]])
R+ Y <data[[“Y4”]]
R+ function(theta){
R+ crossprod(X, Y X %*% theta)
R+ }
R+ }
Then and can be computed in geex:
R> results <m_estimate( R+ estFUN = lm_estfun, R+ data = geexex, R+ root_control = setup_root_control(start = c(0, 0, 0)))
or from the lm and sandwich functions:
R> fm <lm(Y4 ~ X1 + X2, data = geexex) R> sand_vcov <sandwich::sandwich(fm)
The results are virtually identical (maximum absolute difference 1.4e-12). The lm/sandwich option is faster computationally, but geex can be sped up by, for example, changing the options of the derivative function via deriv_control or computing using the parameter estimates from lm. While geex will never replace computationally optimized modelling functions such as lm, the important difference is that geex lays bare the estimating function used, which is both a powerful didactic tool as well as a programming advantage when developing custom estimating functions.
5. Variance corrections
The standard empirical sandwich variance estimator is known to perform poorly in certain situations. In small samples, will tend to underestimate the variance of θˆ(Fay and Graubard 2001). When observational units are not independent and/or do not share the same variance, consistent variance estimators can be obtained by modifying how B(θ0) is estimated. The next two examples demonstrate using geex for finite sample and autocorrelation corrections, respectively.
5.1. Finite sample correction
Particularly in the context of GEE, many authors (e.g., seePaul and Zhang 2014;Li and Redden 2015) have proposed corrections that modify components of and/or by assuming follows a t (or F ), as opposed to Normal, distribution with some estimated degrees of freedom. Many of the proposed corrections somehow modify a combination of the Ai, , Bi, or m matrices.
Users may specify functions that utilize these matrices to form corrections within geex. A finite sample correction function requires at least the argument components, which is an S4 objΣect with slots for the A (= i Ai) matrix, A_i (a list of all m Ai matrices), the B_i i (a list of all m Bi matrices), and ee_i (a list of the observed estimating function values for all m units). Additional arguments may also be specified, as shown in the example. The geex package includes the bias correction and degrees of freedom corrections proposed by Fay and Graubard (2001) in the fay_bias_correction and fay_df_correction functions respectively. The following demonstrates the construction and use of the bias correction.Fay and Graubard (2001) proposed the modified variance estimator the adjustment to (b) where:
and Wjj denotes the jj element of a matrix W. When is close to 1, the adjustment to (b) may be extreme, and the constant b is chosen by the analyst to limit over adjustments. The bias corrected estimator (b) can be implemented in geex by the following function:
R> bias_correction <function(components, b){
R+ A <grab_bread(components)
R+ A_i <grab_bread_list(components)
R+ B_i <grab_meat_list(components)
R+ Ainv <solve(A)
R+
R+ H_i <lapply(A_i, function(m){
R+ diag( (1 pmin(b, diag(m %*% Ainv) ) )^(−0.5) )
R+ })
R+
R+ Bbc_i <lapply(seq_along(B_i), function(i){
R+ H_i[[i]] %*% B_i[[i]] %*% H_i[[i]]
R+ })
R+
R+ Bbc <compute_sum_of_list(Bbc_i)
R+ compute_sigma(A = A, B = Bbc)
R+ }
The compute_sum_of_list sums over a list of matrices, while the compute_sigma(A, B) function simply computes A−1B{A−1}T. To use this bias correction, the m_estimate function accepts a named list of corrections to perform. Each element of the list is a correct_control S4 object that can be created with the helper function correction, which accepts the argument FUN (the correction function) plus any arguments passed to FUN besides components; e.g.,
R> results <m_estimate( R+ estFUN = gee_estfun, data = warpbreaks, R+ units = “wool”, roots = coef(g), compute_roots = FALSE, R+ outer_args = list(formula = breaks ~ tension, R+ family = gaussian(link = “identity”)), R+ inner_args = list(alpha = g$working.correlation[1,2], R+ psi = g$scale), R+ corrections = list( R+ bias_correction_.1 = correction(FUN = bias_correction, b = .1), R+ bias_correction_.3 = correction(FUN = bias_correction, b = .3)))
In the geex output, the slot corrections contains a list of the results of computing each item in the corrections, which can be accessed with the get_corrections function. The corrections of Fay and Graubard (2001) are also implemented in the saws package (Fay and Graubard 2001). Comparing the geex results to the results of the saws::geeUOmega function, the maximum absolute difference for any of the corrected estimated covariance matrices is 3.8e-09.
5.2. Newey-West autocorrelation correction
When error terms are dependent, as in time series data, E[B] is challenging to estimate (Zeileis 2004). A solution is to estimate B using the pairwise sum,
where w|i−j| is a vector of weights that often reflect decreasing autocorrelation as the distance between i and j increases. Many authors have proposed ways of computing weights (see for example,White and Domowitz 1984;Newey and West 1987;Andrews 1991;Lumley and Heagerty 1999).
To illustrate autocorrelation correction using geex, we implement the Newey-West correction (without pre-whitening) and compare to the NeweyWest function in sandwich (Zeileis 2004). The example is taken from the NeweyWest documentation.
R> x <sin(1:100)
R> y <1 + x + rnorm(100)
R> dt <data.frame(x = x, y = y)
R> fm <lm(y ~ x)
R>
R> lm_estfun <function(data){
R+ X <cbind(1, data[[“x”]])
R+ Y <data[[“y”]]
R+ function(theta){
R+ crossprod(X, Y X %*% theta)
R+ }
R+ } R>
R> nwFUN <function(i, j, lag){
R+ ifelse(abs(i -j) <= lag, 1 abs(i j) / (lag + 1), 0)
R+ }
R>
R> nw_correction <function(components, lag){
R+ A <grab_bread(components)
R+ ee <grab_ee_list(components)
R+ Bac <compute_pairwise_sum_of_list(ee, .wFUN = nwFUN, lag = lag)
R+ compute_sigma(A = A, B = Bac)
R+ }
R>
R> results <m_estimate(
R+ estFUN = lm_estfun,
R+ data = dt,
R+ root_control = setup_root_control(start = c(0, 0)),
R+ corrections = list(
R+ NW_correction = correction(FUN = nw_correction, lag = 1)))
R>
R> get_corrections(results)[[1]]
[,1] [,2]
[1,] 0.010555254 0.003304559
[2,] 0.003304559 0.023758823
R> sandwich::NeweyWest(fm, lag = 1, prewhite = FALSE)
(Intercept) x
(Intercept) 0.010555254 0.003304559
x 0.003304559 0.023758823
The function lm_estfun is essentially the same as the previous comparison to sandwich in Section4. The function nw_correction performs the Newey-West adjustment using nwFUN which computes the Newey-West weights for lag L,
The function grab_ee_list returns the list of observed estimating functions, from the sandwich_components object. The utility function compute_pairwise_sum_of_list computes using either (but not both) a fixed vector (argument .w) of weights or a function of i and j (argument .wFUN), which may include additional arguments such as lag, as in this case. For this example, geex and sandwich return nearly identical results.
6. Summary
This paper demonstrates how M-estimators and finite sample corrections can be transparently implemented in geex. The package website (https://bsaul.github.io/geex/) showcases many examples of M-estimation including instrumental variables, sample quantiles, robust regression, generalized linear models, and more. A valuable feature of M-estimators is that estimating functions corresponding to parameters from multiple models may be combined, or “stacked,” in a single set of estimating functions. The geex package makes it easy to stack estimating functions for the target parameters with estimating functions from each of the component models, as shown in the package vignette v06_causal_example. Indeed, the software was motivated by causal inference problems (Saul, Hudgens, and Mallin 2017) where target causal parameters are functions of parameters in multiple models.
The theory of M-estimation is broadly applicable, yet existing R packages only implement particular classes of M-estimators. With its functional programming capabilities, R routines can be more general. The geex framework epitomizes the extensible nature of M-estimators and explicitly translates the estimating function into a corresponding estFUN. In this way, geex should be useful for practitioners developing M-estimators, as well as students learning estimating equation theory.
Figure 3:
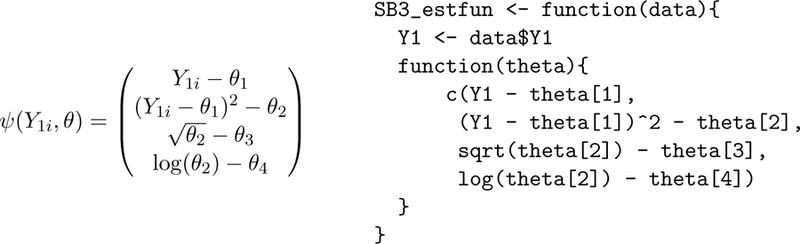
Estimating equations and estFUN for example 3.
Acknowledgments
The Causal Inference with Interference research group at UNC provided helpful feedback throughout this project. Brian Barkley, in particular, contributed and tested the software throughout its development. This work was partially supported by NIH grant R01 AI085073.
The content is solely the responsibility of the authors and does not necessarily represent the official views of the National Institutes of Health.
Contributor Information
Bradley C. Saul, NoviSci, LLC
Michael G. Hudgens, UNC Chapel Hill
References
- Andrews DW (1991). “Heteroskedasticity and Autocorrelation Consistent Covariance Matrix Estimation.” Econometrica: Journal of the Econometric Society, 59(3), 817–858. [Google Scholar]
- Boos DD, Stefanski LA (2013). Essential Statistical Inference: Theory and Methods SpringerVerlag, New York, NY. [Google Scholar]
- Carey VJ (2015). gee: Generalized Estimation Equation Solver. Ported to R by Lumley Thomas and Ripley Brian; R package version 4 13–19, URL https://CRAN.R-project.org/package=gee. [Google Scholar]
- Chauss´ P (2010). “Computing Generalized Method of Moments and Generalized Empirical Likelihood with R.” Journal of Statistical Software, 34(11), 1–35. URL http://www.jstatsoft.org/v34/i11/. [Google Scholar]
- Duembgen L, Nordhausen K, Schuhmacher H (2014). fastM: Fast Computation of Multivariate M-Estimators. R package version 0 0–2, URL https://CRAN.R-project.org/package=fastM. [Google Scholar]
- Fay MP, Graubard BI (2001). “Small-Sample Adjustments for Wald-Type Tests Using Sandwich Estimators.” Biometrics, 57(4), 1198–1206. [DOI] [PubMed] [Google Scholar]
- Halekoh U, Hojsgaard S, Yan J (2006). “The R Package geepack for Generalized Estimating Equations.” Journal of Statistical Software, 15(2), 1–11. doi: 10.18637/jss.v015.i02. [DOI] [Google Scholar]
- Hennig C (2012). smoothmest: Smoothed M-Estimators for 1-Dimensional Location. R package version 0 1–2, URL https://CRAN.R-project.org/package=smoothmest. [Google Scholar]
- Huber PJ, Ronchetti EM (2009). Robust Statistics 2nd edition. John Wiley & Sons, Hoboken. [Google Scholar]
- Li P, Redden DT (2015). “Small Sample Performance of Bias-Corrected Sandwich Estimators for Cluster-Randomized Trials with Binary Outcomes.” Statistics in Medicine, 34(2), 281–96. doi: 10.1002/sim.6344. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Liang KY, Zeger SL (1986). “Longitudinal Data Analysis Using Generalized Linear Models.” Biometrika, 73(1), 13–22. [Google Scholar]
- Lumley T, Heagerty P (1999). “Weighted Empirical Adaptive Variance Estimators for Correlated Data Regression.” Journal of the Royal Statistical Society B (Statistical Methodology), 61(2), 459–477. [Google Scholar]
- Lunceford JK, Davidian M (2004). “Stratification and Weighting Via the Propensity Score in Estimation of Causal Treatment Effects: A Comparative Study.” Statistics in Medicine, 23(19), 2937–2960. [DOI] [PubMed] [Google Scholar]
- McDaniel LS, Henderson NC, Rathouz PJ (2013). “Fast Pure R Implementation of GEE: Application of the Matrix Package.” The R Journal, 5, 181–187. URL https://journal.r-project.org/archive/2013-1/mcdaniel-henderson-rathouz.pdf. [PMC free article] [PubMed] [Google Scholar]
- Newey WK, West KD (1987). “A Simple, Positive Semi-Definite, Heteroskedasticity and Autocorrelation Consistent Covariance Matrix.” Econometrica, 55(3), 703–708. [Google Scholar]
- Paul S, Zhang X (2014). “Small Sample GEE Estimation of Regression Parameters for Longitudinal Data.” Statistics in Medicine, 33(22), 3869–81. doi: 10.1002/sim.6198. [DOI] [PubMed] [Google Scholar]
- Perez-Heydrich C, Hudgens MG, Halloran ME, Clemens JD, Ali M, Emch ME (2014). “Assessing Effects of Cholera Vaccination in the Presence of Interference.” Biometrics, 70(3), 731–741. [DOI] [PMC free article] [PubMed] [Google Scholar]
- R Core Team (2016). R: A Language and Environment for Statistical Computing. R Foundation for Statistical Computing, Vienna, Austria. URL https://www.R-project.org/. [Google Scholar]
- Saul BC, Hudgens MG, Mallin MA (2017). “Upstream Causes of Downstream Effects.” arXiv preprint arXiv:1705.07926 [Google Scholar]
- Soetaert K (2009). rootSolve: Nonlinear Root Finding, Equilibrium and Steady-State Analysis of Ordinary Differential Equations. R package version 1.6, URL https://cran.r-project.org/web/packages/rootSolve/index.html. [Google Scholar]
- Soetaert K, Herman PM (2009). A Practical Guide to Ecological Modelling. Using R as a Simulation Platform Springer Science & Business Media. [Google Scholar]
- Stefanski LA, Boos DD (2002). “The Calculus of M-Estimation.” The American Statistician, 56(1), 29–38. [Google Scholar]
- White H, Domowitz I (1984). “Nonlinear Regression with Dependent Observations.” Econometrica: Journal of the Econometric Society, 52(1), 143–162. [Google Scholar]
- Wickham H (2014). Advanced R CRC Press. doi: 10.1201/b17487-2. [DOI] [Google Scholar]
- Zeileis A (2004). “Econometric Computing with HC and HAC Covariance Matrix Estimators.” Journal of Statistical Software, 11(10), 1–17. doi: 10.18637/jss.v011.i10. [DOI] [Google Scholar]
- Zeileis A (2006). “Object-Oriented Computation of Sandwich Estimators.” Journal of Statisical Software, 16(9), 1–16. doi: 10.18637/jss.v016.i09. [DOI] [Google Scholar]