

Abstract
目的
通过动物实验评价骨圣元化全膝关节置换手术辅助系统(YUANHUA-TKA)的操作性能、安全性及精准性,为其人体临床试验提供数据。
方法
18 月龄山羊 6 只,体质量 30~35 kg,术前对山羊双下肢进行 CT 三维扫描,然后使用 YUANHUA-TKA 系统进行 CT 分割,获取股骨及胫骨三维模型,进一步规划膝关节股骨和胫骨各平面截骨厚度和截骨角度。术者在 YUANHUA-TKA 系统辅助下按照手术规划的截骨厚度和角度完成各平面的截骨。截骨完成后大体观察,并行双下肢 CT 三维扫描,用三维计算软件测量实际截骨厚度和角度,并与术前规划值进行比较。
结果
实验过程中出血未见异常;软件系统无卡顿崩溃情况;机械臂未出现无法随时悬停或超出截骨规划区切割情况;YUANHUA-TKA 系统整体运行稳定。术后即刻大体观察示股骨和胫骨的骨截面平整。术前规划的截骨厚度和截骨角度与术后实测值比较差异均无统计学意义(P>0.05);截骨厚度误差<1 mm,截骨角度误差<2°。
结论
YUANHUA-TKA 系统能辅助术者依照术前规划进行截骨,控制截骨厚度和角度,对 TKA 有良好的辅助作用,有望在临床使用中辅助关节外科医生完成更精准高效的截骨。
Keywords: 全膝关节置换术, 手术机器人, 辅助截骨, 山羊
Abstract
Objective
To evaluate the performance, safety, and precision of the Yuanhua robotic-assisted total knee arthroplasty system (YUANHUA-TKA) through animal experiments, which will provide reference data for human clinical trials.
Methods
Six 18-month-old goats, weighing 30-35 kg, were used in this study. The experimental study was divided into two parts: the preoperative planning and intraoperative bone resection. CT scans of the goats’ lower extremities were firstly performed before the experiments. Then the CT scans were segmented to generate the femoral and tibial three-dimensional (3D) models in the YUANHUA-TKA system. The volumes and angles of each resection plane on the femur and tibia were planned. The bone resection was finally implemented under the assistance of the YUANHUA-TKA system. After completing all bone resections, the lower extremities of each goat were taken to have CT scans. By comparing the femoral and tibial 3D models before and after the experiments, the actual bone resection volumes and angles were calculated and compared with the preoperative values.
Results
During the experiments, no abnormal bleeding was found; the YUANHUA-TKA system ran smoothly and stably and was able to stop moving and keep the osteotomy in the safe zone all the time. After the experiment, the resection planes were observed immediately and found to be quite flat. There was no significant difference between the planned and actual osteotomy thickness and osteotomy angle (P>0.05); the error of the osteotomy thickness was less than 1 mm, and the error of the osteotomy angle was less than 2°.
Conclusion
The YUANHUA-TKA system can assist the surgeons to perform osteotomy following the planned thickness and angle values. It is expected to assist surgeons to implement more accurate and efficient osteotomy in the future clinical applications.
Keywords: Total knee arthroplasty, robot-assisted surgery, assisted osteotomy, goat
全膝关节置换术(total knee arthroplasty,TKA)是治疗终末期膝关节骨关节炎的经典手术[1]。据统计,2018 年我国完成 TKA 约 25 万例。随着中国人口老龄化,人工膝关节置换数量必将逐年增长[2]。患者满意度、术后功能恢复和假体生存率一直都是 TKA 疗效的主要评价指标,尽管在假体设计、手术器械、手术技术和术后康复等方面均有巨大提高,但是传统 TKA 术后患者不满意率仍高达 20%,疗效不理想的主要原因为常规手工操作的技术限制,导致计划误差、假体位置不良和关节不稳等[3-5]。
TKA 辅助系统可极大提高术中截骨和术后假体位置的精准性,术中还可以根据三维图像实时反馈调整假体的对位、对线以及软组织张力平衡。因此,基于机器人系统辅助的 TKA,能获得精确的假体位置、量化的软组织平衡以及完美的影像学对线,而且可重复率极高[6-11]。近期有大量临床文献表明机器人辅助 TKA 的优势包括:假体植入精确度高、术后下肢力线恢复好、软组织损伤少、并发症少等[12]。目前国内外使用较广泛、技术较成熟的 TKA 辅助系统是美国史赛克公司 Mako RIO 系统[13],但是因其在我国没有医疗器械许可证,尚不可临床使用,且其研发和生产均在国外,其人机交互方式与国内医生习惯存在差异。国内该领域研发方面仍处于起步摸索阶段[14-17],目前市场上尚无可以临床使用的产品。
骨圣元化 TKA 辅助系统(YUANHUA-TKA)是目前国内研发较早、技术成熟、可用于辅助 TKA 的机器人系统,填补了我国在该领域的空白。在前期工作中,YUANHUA-TKA 系统的精准度和稳定性已经通过近 400 例假骨模型实验得到充分验证,系统的电磁兼容性以及电气安全性能也已经通过了中国食品药品检定研究院(NIFDC)的检测。为了在临床应用前进一步评估 YUANHUA-TKA 系统的操作性能、精确度及使用的安全性,本研究将基于山羊进行膝关节截骨实验。
1. 材料与方法
1.1. 实验动物及主要材料、仪器
18 月龄山羊 6 只,雌雄不限,体质量 30~35 kg,由深圳市领先医疗服务有限公司采购,并在其动物实验中心进行实验。实验过程使用耳标进行动物标记。
异氟烷(深圳瑞沃德生命科技有限公司);陆眠宁(吉林华牧动物保健品有限公司)。心电监护仪(CRICK 公司,美国),实验过程中实时监测动物的心电状况;YUANHUA-TKA 系统[元化智能科技(深圳)有限公司],实验过程中辅助完成截骨操作。
1.2. YUANHUA-TKA 系统的构成及工作原理
该系统硬件部分主要由三部分组成(图 1):机械臂系统、导航仪系统和主控台车系统[18-20];软件部分根据国内医生习惯,优化人机交互策略,嵌入了完全自主研发的术中安全保护策略算法,可以有效防止术中误伤患者韧带、血管等重要组织,从而进一步保证了手术的安全性和精准度。
图 1.
The YUANHUA-TKA system
YUANHUA-TKA 系统
a:主控台车系统 b:机械臂系统 c:导航仪系统
a: The console system b: The manipulator system c: The navigation system

工作原理:术前首先对 CT 图像进行自动分割,分别生成股骨和胫骨三维模型,并基于该模型进行手术方案的智能规划,包括假体配型、规划截骨量等。手术过程中,医生分别在股骨和胫骨植入固定钉,安装股骨和胫骨示踪器,通过精准高效的注册算法,将示踪器和导航仪互动所得的参数与术前的骨模型进行校正和配准,完成坐标系转换[21-23];然后通过术中规划功能,进一步由医生根据实际病况对截骨规划进行微调。最后,医生手握机械臂末端的摆锯,在机械臂辅助下完成膝关节置换截骨操作。截骨过程中,在导航仪系统和机械臂的配合下,摆锯的运动范围限制在预定安全范围之内,既可以防止对韧带、血管、神经等组织的损伤,也可以有效避免截骨量过多,提高手术的精准度和安全性。
1.3. 实验方法
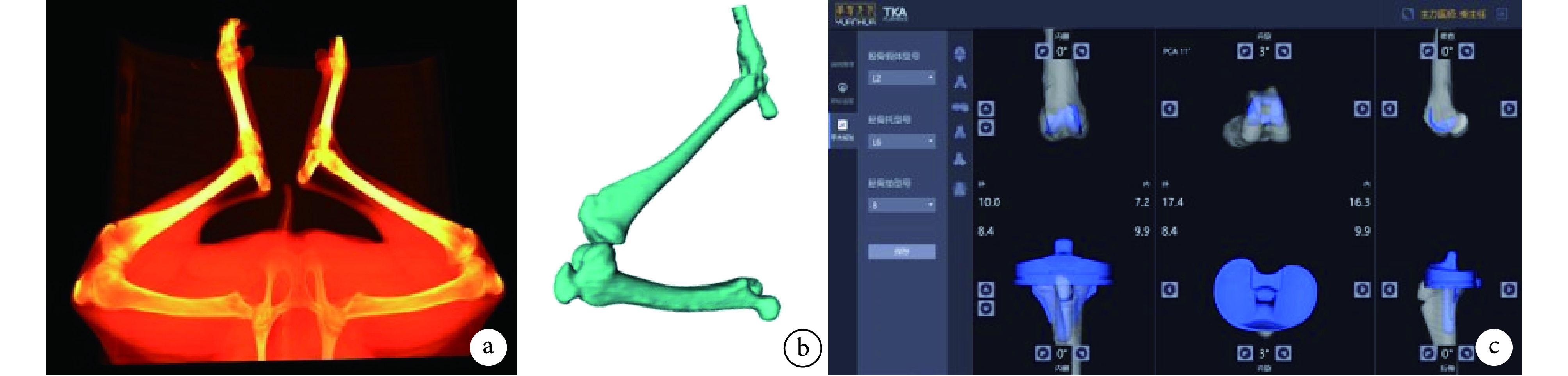
实验开始前 2 d 首先对 6 只山羊双下肢进行 CT 三维扫描,并进行 CT 分割,得到每个下肢的股骨和胫骨三维模型。然后登录 YUANHUA-TKA 系统手术规划软件,对每个下肢进行截骨规划。因为没有适配山羊膝关节的假体,本实验根据最小号的人体膝关节假体进行截骨规划,其中包括胫骨平台平面以及股骨的随机 2 个平面,并记录每个平面的规划截骨厚度和截骨角度。见图 2。
图 2.
Preoperative preparation of the animal experiment
动物实验术前准备
a. 下肢 CT 扫描;b. CT 分割获取股骨和胫骨三维模型;c. 基于手术规划系统进行截骨规划
a. CT scan of the lower extremity; b. CT segmentation to build the 3D models of the femur and tibia; c. Planning the resection planes based on the operation planning system
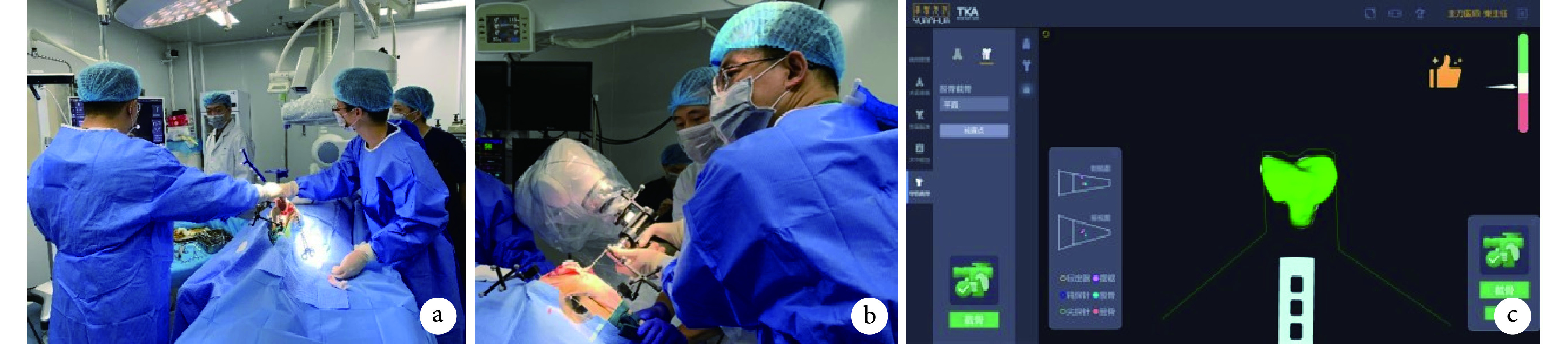
术前山羊禁食 12 h,使用盐酸赛拉嗪诱导麻醉,建立静脉通道。手术部位剃毛备皮,气管插管后上台,仰卧位固定,连接心电监护仪进行生命体征监护,连接麻醉机,使用异氟烷维持麻醉。术中山羊采用仰卧位,首先分别在股骨及胫骨安装示踪器。然后取膝关节内侧入路,切开皮肤和皮下组织,进入关节,充分暴露胫骨平台,按照 YUANHUA-TKA 系统操作指南依次对股骨和胫骨进行注册配准。配准完成后,系统进入术中规划模块,实验者可对截骨参数进行调整确认。截骨过程中,首先选择当前的截骨平面,然后 YUANHUA-TKA 系统的机械臂会自动调整,使截骨摆锯与当前截骨平面对齐,实验者此时可以在限定的截骨平面内移动摆锯完成截骨操作。见图 3。为保证截骨精度以及保护侧副韧带、血管等重要组织,YUANHUA-TKA 系统设定了安全限制:当系统检测到截骨量过多或锯片超过了当前截骨安全边界时,摆锯自动停电,无法继续进行截骨。实验者需微调摆锯姿态,使之回到安全范围内,才能继续截骨操作。截骨完成后,保存手术方案并退出。
图 3.
Bone resection assisted by the YUANHUA-TKA system
YUANHUA-TKA 系统辅助下的截骨过程
a. 注册配准;b. 导航截骨;c. 截骨过程中的手术软件界面 主视图中的绿色线框表示截骨安全范围,右上角色条实时更新当前摆锯与截骨平面的位置关系,保证精准截骨
a. Registration; b. Bone resection assisted by the navigation system; c. The software interface during the bone resection The green boundary around the model indicated the safety range of resection, the color bar indicated the relative position between the saw blade and the resection plane in real time to ensure the resection accuracy
1.4. 观测指标
1.4.1. 大体观察
本研究使用的山羊在手术辅助系统完成截骨后,即刻实施安乐死,取出股骨和胫骨标本进行大体观察。
1.4.2. 结果测量
取双下肢残肢进行 CT 三维扫描,获取股骨和胫骨三维模型,用三维测量软件(SolidWorks)导入术前和术后的三维模型,并进行模型匹配,通过对比两个模型计算实际截骨厚度。股骨截骨角度为两个截骨平面在矢状面的夹角,胫骨截骨角度为胫骨截骨平面与胫骨机械轴在矢状面的夹角。见图 4。为保证测量精度,减小测量误差,由 3 名未参与实验但熟悉三维测量软件的人员进行测量,每人测量 1 次,取 3 个测量值中相近的 2 个测量值计算平均值作为测量结果。
图 4.
Sketch map of the osteotomy thickness and angle measurement
截骨平面截骨厚度及截骨角度测量示意图
a. 术前和术后 CT 三维模型匹配;b. 通过对比术前和术后模型,测量截骨量;c. 股骨截骨角度测量
a. Matching the preoperative and postoperative CT 3D models; b. Measuring the osteotomy thickness by comparing the preoperative and postoperative models; c. Measuring the femoral osteotomy angle

1.5. 统计学方法
采用 SPSS22.0 统计软件进行分析。数据以均数±标准差表示,术前规划和术后实测的截骨厚度及截骨角度比较采用配对 t 检验;检验水准 α=0.05。
2. 结果
实验过程中出血未见异常;软件系统无卡顿崩溃情况;机械臂未出现无法随时悬停或超出截骨规划区切割情况;YUANHUA-TKA 系统整体运行稳定。术后即刻大体观察示股骨和胫骨的截骨面平整。见图 5。术前规划的截骨厚度和截骨角度与术后实测值比较,差异均无统计学意义(P>0.05);截骨厚度误差<1 mm,截骨角度误差<2°。见表 1、2。
图 5.
The observation of the osteotomy planes of the lower limb specimens at immediate after operation
术后即刻截骨面大体观察
a~c. 股骨截面;d. 胫骨截面
a-c. Femur resection planes; d. Tibia resection plane
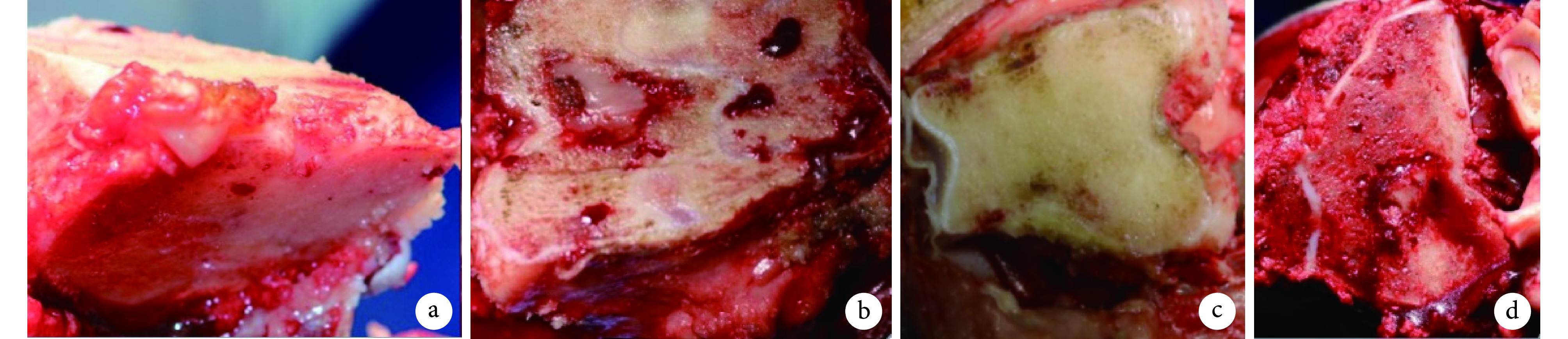
表 1.
Comparison of the error of preoperative planning and postoperative measured osteotomy thickness and angle
术前规划和术后实测的截骨厚度及截骨角度误差
| 序号
No. |
侧别
Side |
截骨厚度(mm)
Osteotomy thickness (mm) |
截骨角度(°)
Osteotomy angle (°) |
||||||
| 股骨前髁
Femoral anterior condyle |
股骨远端
Distal femur |
股骨后髁
Femoral posterior condyle |
股骨前斜
Femoral anterior chamfer |
胫骨
Tibia |
股骨
Femur |
胫骨
Tibia |
|||
| 注:“/”表示该骨面未进行截骨;实际截骨厚度或角度大于规划值时为负值
Note:“/” indicated that no osteotomy had been performed on the bone surface; when the actual osteotomy thickness or angle was greater than the planned value, it was negative | |||||||||
| 1 | 左 | / | 0.4 | −0.2 | / | −0.1 | −1.6 | 1.8 | |
| 右 | / | −0.5 | −0.4 | / | 0.6 | 1.2 | −1.1 | ||
| 2 | 左 | / | / | 0.5 | −0.5 | −0.7 | 1.7 | −1.5 | |
| 右 | / | / | 0.8 | −0.5 | 0.5 | 0.4 | −0.7 | ||
| 3 | 左 | / | 0.2 | 0.5 | / | −0.5 | 1.8 | 0.2 | |
| 右 | / | 0.3 | 0.4 | / | −0.2 | 0.4 | 1.6 | ||
| 4 | 左 | / | / | −0.2 | −0.3 | −0.6 | −1.3 | −0.7 | |
| 右 | / | / | 0.7 | −0.5 | −0.2 | −0.7 | −1.5 | ||
| 5 | 左 | 0.6 | / | 0.4 | / | −0.4 | −1.3 | −1.3 | |
| 右 | 0.2 | / | −0.5 | / | −0.6 | −0.2 | 1.0 | ||
| 6 | 左 | / | / | −0.8 | −0.7 | −1.1 | 0.9 | 1.6 | |
| 右 | / | / | −0.2 | 0.7 | −0.2 | 1.7 | −1.3 | ||
表 2.
Comparison of preoperative planning and postoperative measured osteotomy thickness and angle (n=12,
 )
)
术前规划及术后实测截骨厚度和角度比较(n=12,
 )
)
| 时间
Time |
截骨厚度(mm)
Osteotomy thickness (mm) |
截骨角度(°)
Osteotomy angle (°) |
| 术前
Preoperative |
10.639±3.308 | 72.667±27.575 |
| 术后
Postoperative |
10.725±3.238 | 72.604±27.594 |
| 误差
Error |
−0.086±0.513 | 0.063±1.276 |
| 95%CI | (−0.260,0.087) | (−0.476,0.601) |
| 统计值
Statistic |
t=−1.011
P=0.319 |
t=0.240
P=0.812 |
3. 讨论
本实验采用的 YUANHUA-TKA 系统与目前市场上唯一的 TKA 辅助系统 Mako RIO 相比,因其人机交互策略根据中国医生的需求进行设计和优化,因此有更友好的人机交互策略,也更适合中国医生的操作使用习惯。在外形体积上,YUANHUA-TKA 系统更加小巧灵活,占用手术室空间更小。此外,与国内早期研发的 WATO 膝关节置换手术机器人系统[24]相比,YUANHUA-TKA 系统采用 7 自由度机械臂,活动空间更大、柔顺性更好。
为初步验证 YUANHUA-TKA 系统的可靠性和精准性,本研究设计了基于山羊的膝关节截骨实验。羊膝关节的生物力学行为与人类相当,在羊行进过程中,膝关节承受着纵向压应力,与人接近,用羊进行 TKA 研究的可行性已获认同。本次动物实验结果表明,采用 YUANHUA-TKA 系统整体运行稳定,软件操作性能优良,图像显示清晰流畅,机械臂截骨操作稳定。系统可以辅助实验者依照术前规划进行截骨,控制截骨厚度和角度,且截骨厚度误差<1 mm,截骨角度误差<2°,与 Mako RIO 系统精度相当[25],同时也满足临床 TKA 精度要求。因此,本实验结果为 YUANHUA-TKA 系统应用于临床提供了有效的截骨精度和截骨可靠性验证。
本实验中,因山羊股骨和胫骨尺寸太小,截骨平面规划没有完全按照临床实际需求进行,截骨完成后也无法安装可用的假体,不能验证辅助 TKA 后下肢力线恢复准确率以及假体安装的精准度。因此,在下一步研究中我们将通过 YUANHUA-TKA 系统在尸体标本中的应用,为临床应用提供更直观、更可靠的证据。
虽然机器人辅助关节置换可以获得更好的下肢力线和更高的假体植入精度,但文献表明使用机器人系统辅助完成 TKA 的患者其关节活动度无明显改善,且患者中长期功能恢复中的获益尚无充分的临床研究证据[12],因此机器人辅助 TKA 的长期效益还有待研究。
作者贡献:柴伟、谢杰、张晓岗、何川、张瑗负责方案设计,根据临床使用需求提出改善 YUANHUA-TKA 系统的功能以及人机交互策略,并实施动物实验操作;延廷芳负责组织动物实验、数据分析以及文章撰写;赵亚兰负责软件开发以及动物实验过程中的系统操作。
利益冲突:所有作者声明,在课题研究和文章撰写过程中不存在利益冲突。课题经费支持没有影响文章观点和对研究数据客观结果的统计分析及其报道。
机构伦理问题:动物实验方案经深圳市领先医疗服务有限公司实验动物管理和使用委员会 IACUC 批准。实验动物使用许可证批准号:AAS190906G。
Funding Statement
陆军军医大学临床医学创新技术项目(2018JSLC0035);重庆市技术创新与应用示范项目(CTSC2018jscx-msybX0051);北京市自然科学基金-海淀原始创新联合基金资助项目(L182063)
Clinical Medicine Innovation Technology Project of the Army Medical University (2018JSLC0035); Demonstration Project of Technology Innovation and Application of Chongqing City (CTSC2018jscx-msybX0051); Beijing Natural Science Foundation-Haidian Primitive Innovation Joint Funds (L182063)
Contributor Information
川 何 (Chuan HE), Email: drhechuan@sina.com.
瑗 张 (Yuan ZHANG), Email: joint_chueng@hotmail.com.
References
- 1.Panjwani TR, Mullaji A, Doshi K, et al Comparison of functional outcomes of computer-assisted vs conventional total knee arthroplasty: A systematic review and meta-analysis of high-quality, prospective studies . J Arthroplasty. 2019;34(3):586–593. doi: 10.1016/j.arth.2018.11.028. [DOI] [PubMed] [Google Scholar]
- 2.Wu ZX, Sang HX, Zhou Y, et al. Robot-assisted orthopedic surgery//Pei G. Digital Orthopedics. Berlin: Springer, 2018: 425-447.
- 3.Mahdi A, Svantesson M, Wretenberg P, et al. Patients’ experiences of discontentment one year after total knee arthroplasty-a qualitative study. BMC Musculoskeletal Disorders, 2020, 21(1): 29. doi: 10.1186/s12891-019-3017-y.
- 4.Goh GS, Liow MHL, Bin Abd Razak HR, et al Patient-reported outcomes, quality of life, and satisfaction rates in young patients aged 50 years or younger after total knee arthroplasty. J Arthroplasty. 2017;32(2):419–425. doi: 10.1016/j.arth.2016.07.043. [DOI] [PubMed] [Google Scholar]
- 5.Van Onsem S, Van Der Straeten C, Arnout N, et al A new prediction model for patient satisfaction after total knee arthroplasty. J Arthroplasty. 2016;31(12):2660–2667. doi: 10.1016/j.arth.2016.06.004. [DOI] [PubMed] [Google Scholar]
- 6.King C, Edgington J, Perrone M, et al The effects of robot-assisted total knee arthroplasty on readmission and postoperative pain: Are the added costs worth it? Orthopaedic Proceedings. 2019;101-B(SUPP_5):124. [Google Scholar]
- 7.张国华, 李凯, 赵斌, 等 机器人辅助人工全膝关节置换与传统手术临床效果比较的 Meta 分析. 中国骨伤. 2019;32(9):846–852. [Google Scholar]
- 8.Song EK, Seon JK, Yim JH, et al Robotic-assisted TKA reduces postoperative alignment outliers and improves gap balance compared to conventional TKA. Clin Orthop Relat Res. 2013;471(1):118–126. doi: 10.1007/s11999-012-2407-3. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 9.Banerjee S, Cherian JJ, Elmallah RK, et al Robotic-assisted knee arthroplasty. Expert Rev Med Devices. 2015;12(6):727–735. doi: 10.1586/17434440.2015.1086264. [DOI] [PubMed] [Google Scholar]
- 10.Liow MHL, Goh GS, Wong MK, et al Robotic-assisted total knee arthroplasty may lead to improvement in quality-of-life measures: a 2-year follow-up of a prospective randomized trial. Knee Surg Sports Traumatol Arthrosc. 2017;25(9):2942–2951. doi: 10.1007/s00167-016-4076-3. [DOI] [PubMed] [Google Scholar]
- 11.Jacofsky DJ, Allen M Robotics in arthroplasty: A comprehensive review. J Arthroplasty. 2016;31(10):2353–2363. doi: 10.1016/j.arth.2016.05.026. [DOI] [PubMed] [Google Scholar]
- 12.Ren Y, Cao S, Wu J, et al Efficacy and reliability of active robotic-assisted total knee arthroplasty compared with conventional total knee arthroplasty: a systematic review and meta-analysis. Postgrad Med J. 2019;95(1121):125–133. doi: 10.1136/postgradmedj-2018-136190. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 13.Gustke K. Total knee arthroplasty technique: MAKO//Lonner J. Robotics in knee and hip arthroplasty. Berlin: Springer, 2019: 157-166.
- 14.Pei GX, Yan YB Current status and progress of digital orthopaedics in China. Journal of Orthopaedic Translation. 2014;2(3):107–17. doi: 10.1016/j.jot.2014.05.001. [DOI] [Google Scholar]
- 15.韩晓光, 刘亚军, 范明星, 等 骨科手术机器人技术发展及临床应用. 科技导报. 2017;35(10):19–25. [Google Scholar]
- 16.朱科朝, 王俏杰, 陈云苏, 等 机器人辅助下膝关节单髁置换术短期临床疗效. 中华关节外科杂志 (电子版) 2019;13(5):547–553. [Google Scholar]
- 17.郭珀宏, 刘日新, 刘万新, 等 UKA 与 TKA 治疗中国地区中老年人膝单间室骨关节炎疗效对比的 Meta 分析. 当代医学. 2019;25(35):25–30. doi: 10.3969/j.issn.1009-4393.2019.35.010. [DOI] [Google Scholar]
- 18.李艾俐, 周越, 延廷芳, 等. 手术导航仪: 中国, ZL 201930068351. X. 2019-11-01.
- 19.李艾俐, 周越, 延廷芳, 等. 手术机械臂: 中国, ZL 201930067140.4. 2019-09-27.
- 20.李艾俐, 周越, 延廷芳, 等. 主控端台车: 中国, ZL 201930067138.7. 2019-08-06.
- 21.Min Z, Wang J, Meng MQ. Joint rigid registration of multiple generalized point sets with hybrid mixture models. IEEE Transactions on Automation Science and Engineering, 2019. doi: 10.1109/TASE.2019.2906391.
- 22.Min Z, Ren H, Meng MQ Estimation of surgical tool-tip tracking error distribution in coordinate reference frame involving pivot calibration uncertainty. Healthc Technol Lett. 2017;4(5):193–198. doi: 10.1049/htl.2017.0065. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 23.Liu L, Siebenrock K, Nolte LP, et al Computer-assisted planning, simulation, and navigation system for periacetabular osteotomy. Adv Exp Med Biol. 2018;1093:143–155. doi: 10.1007/978-981-13-1396-7_12. [DOI] [PubMed] [Google Scholar]
- 24.赵辉, 赵子健, 刘允才, 等 一种新型计算机辅助全膝关节置换手术系统: 华佗 (WATO) 中国骨与关节外科. 2009;2(4):279–283. [Google Scholar]
- 25.Sires JD, Craik JD, Wilson CJ. Accuracy of bone resection in mako total knee robotic-assisted surgery. J Knee Surg, 2019. doi: 10.1055/s-0039-1700570.