

Abstract
Self-selected walking speed is an important aspect of mobility. Exoskeletons can increase walking speed, but the mechanisms behind these changes and the upper limits on performance are unknown. Human-in-the-loop optimization is a technique for identifying exoskeleton characteristics that maximize the benefits of assistance, which has been critical to achieving large improvements in energy economy. In this study, we used human-in-the-loop optimization to test whether large improvements in self-selected walking speed are possible through ankle exoskeleton assistance. Healthy participants (N = 10) were instructed to walk at a comfortable speed on a self-paced treadmill while wearing tethered ankle exoskeletons. An algorithm sequentially applied different patterns of exoskeleton torque and estimated the speed-optimal pattern, which was then evaluated in separate trials. With torque optimized for speed, participants walked 42% faster than in normal shoes (1.83 m s−1 vs. 1.31 m s−1; Tukey HSD, p = 4 × 10−8), with speed increases ranging from 6% to 91%. Participants walked faster with speed-optimized torque than with torque optimized for energy consumption (1.55 m s−1) or torque chosen to induce slow walking (1.18 m s−1). Gait characteristics with speed-optimized torque were highly variable across participants, and changes in metabolic cost of transport ranged from a 31% decrease to a 78% increase, with a decrease of 2% on average. These results demonstrate that ankle exoskeletons can facilitate large increases in self-selected walking speed, which could benefit older adults and others with reduced walking speed.
Keywords: Exoskeleton gait assistance, human-in-the-loop optimization, walking speed
I. Introduction
EXOSKELETONS can improve some aspects of walking performance and show promise for improving human mobility overall. Fully-actuated lower-limb exoskeletons can enable people with serious neurological injuries to walk again [1], [2]. Exoskeletons that assist the hip, knee or ankle joints individually tend to be more compact, but can still enhance healthy and mildly-impaired gait. Recently, hip and ankle exoskeletons have been used to reduce metabolic energy consumption during walking [3]–[8]. While improving energy economy is important, other equally important dimensions of walking performance, such as walking speed, have received less attention.
The speed chosen for normal walking is one of the main performance measures of walking and is closely linked to quality of life [9]. This speed is also known as self-selected, preferred, or comfortable speed. Walking speed is important because it determines the time required to travel from one place to another, often the main purpose of locomotion. Healthy adults typically walk at speeds near 1.3 m s−1, which is substantially slower than their maximum walking speeds of greater than 2 m s−1 [9]. This is perhaps because walking faster comes at the expense of other factors such as energy economy, stability, comfort, or endurance [10]–[13]. The costs of fast walking can increase with age and neuromuscular disease, causing people to walk much slower [10], [13]–[15]. Fear of falling, or too much caution, can also lead to slower walking speeds. This reduction in walking speed can contribute to a deterioration in health-related quality of life, social participation, and life satisfaction [16], [17].
Exoskeletons can affect self-selected walking speed, but the extent of their potential impact has been unclear. Ankle and hip exoskeletons can increase self-selected walking speed for older adults [18] and people with chronic stroke [19] by about 0.15 m s−1, a moderate improvement near the minimal clinically important difference [20], [21]. The effect of an exoskeleton on walking speed can change over time due to motor learning [22], so sufficient training is needed prior to assessment. Training with exoskeletons can also provide a therapeutic effect for people post-stroke and with spinal cord injury, leading to faster walking after the device has been removed, even though an immediate benefit may not be found wearing the device [22], [23]. These findings are promising, but result from exoskeletons that were not specifically designed to increase speed, suggesting that larger improvements might be possible.
Human-in-the-loop optimization can be used to estimate the exoskeleton characteristics that will maximize a given aspect of locomotor performance. Exoskeleton controllers typically include several parameters that can be tuned to improve performance [3], [5]–[7], [24], [25]. For example, an ankle exoskeleton might apply a pattern of torque as a function of time, defined by a few parameters, which could then be tuned to reduce the metabolic energy cost of walking [5]. Tuning control parameters to maximize performance is challenging because of the complexity of the human neuromuscular system, and because outcomes vary both across participants and within a participant as they learn to use the device [22], [24]. Human-in-the-loop optimization is a framework for tuning control parameters in response to real-time performance measurements while a participant uses an exoskeleton [5], [26]. This approach has been central to attaining large improvements in the metabolic energy economy of walking and running [5], [6], [27]. However, we do not know whether human-in-the-loop optimization will be effective for other performance measures, and it has not yet been applied to walking speed in part due to challenges in reliably measuring self-selected walking speed in a laboratory setting.
Self-paced treadmills can be an effective tool for measuring self-selected walking speed. Exoskeleton studies are often conducted on a treadmill in a laboratory because this allows collection of biomechanics gait data and use of immobile systems such as exoskeletons tethered to off-board motors and computers [3], [5], [6], [24], [25]. While there are other methods of measuring self-selected speed on a treadmill, such as asking participants to indicate their comfortable speed during sweeps between slow and fast speeds [28], self-paced treadmills can be more convenient [29], [30]. We previously developed open-source software [31] that controls a force-instrumented treadmill to adapt to participant speed without requiring additional instrumentation. We found that self-selected walking speed on the self-paced treadmill tightly correlated with speed during short and long bouts of over-ground walking in normal shoes [30].
There are many scientific questions regarding the effects of exoskeleton assistance on self-selected walking speed that could be resolved by a targeted study. One question is: to what extent can exoskeleton assistance increase self-selected walking speed? While we know that moderate increases in speed are possible among some slower-walking populations [18], [19], it may be difficult to induce larger changes because of constraints related to stability, comfort, fear, energy consumption, or fatigue [10]–[13]. On the other hand, it may be possible to induce people to walk at their maximum speed or even transition to running. Another question is: how will exoskeleton assistance tuned for increased speed affect other gait features? For example, joint kinematics and step length during exoskeleton-assisted fast walking may or may not be close to those of walking in normal shoes at the same speed. Other outcomes, such as efficiency, stability and comfort, may also be affected by speed-optimal assistance. Ideally these other outcomes would be similar to or better than the values for unassisted walking, but this is not guaranteed when optimizing only for speed. A final question is: what exoskeleton characteristics will correspond to the largest improvements in speed and will they be consistent across participants? Humans can walk at the same speed with a variety of gaits. An optimization process that maximizes only speed might exploit unexpected interactions between exoskeleton behavior and walking speed, generating varying, and possibly undesirable, solutions across participants. Answers to these questions would be valuable to designers of assistive devices and could lead to products that enhance self-selected walking speed for people who have slowed due to aging or neuromuscular disorder.
The main purpose of this study was to determine whether ankle exoskeleton assistance can be used to cause large increases in self-selected walking speed. Additionally, the study aimed to identify the characteristics of speed-optimal assistance and observe the corresponding changes in human gait features. We used a human-in-the-loop optimization approach in which maximizing self-selected walking speed was the objective (Fig. 1). We applied torque to both ankles using an exoskeleton emulator with powerful off-board motors and computers [32], which allowed for a wide range of torque patterns to be investigated quickly and reliably [5], [6], [26], [27]. We controlled exoskeleton torque as a function of time according to a single-peak curve defined by four parameters (peak torque magnitude, peak time, rise time, and fall time) because it had previously been effective in optimizing for metabolic energy cost during walking [5]. We instructed participants to walk at their comfortable speed on a self-paced treadmill [30] to obtain real-time measurements of self-selected walking speed. During optimization, the exoskeleton applied a torque pattern which changed at one-minute intervals, allowing the optimizer [33] to periodically update its estimate of the speed-optimal parameters. We compared optimized assistance to other torque patterns and baseline conditions in separate validation tests to robustly assess outcomes.
Fig. 1.
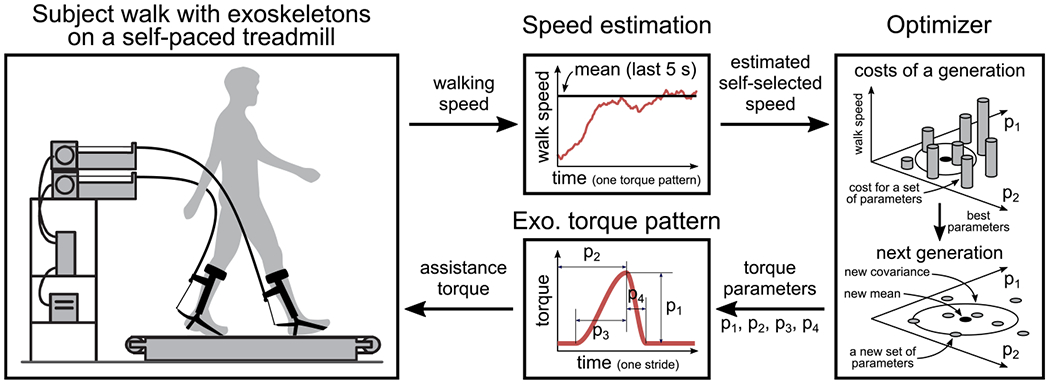
Human-in-the-loop optimization approach used to estimate speed-optimal exoskeleton torque patterns. The box on the left represents the experimental setup, in which a participant walked on a self-paced treadmill while wearing tethered ankle exoskeletons. The boxes at right depict the optimization process conceptually. The exoskeletons applied a torque pattern (bottom center) defined by four control parameters (p1: peak magnitude, p2: peak time, p3: rise time, and p4: fall time). For each torque pattern, speed was estimated as the average treadmill speed in the final 5 s of a 1 min trial. After a set of torque patterns had been evaluated, forming one generation, the optimizer used the results to create a new generation for evaluation.
II. Materials and Methods
A. Apparatus and Software
We used a bilateral ankle exoskeleton emulator system [32] to apply a wide range of plantarflexion torque profiles during walking. An off-board real-time computer (Speed-goat) took target torques as input and controlled off-board motors (Humotech) that transmitted mechanical power through Bowden cables to the exoskeletons. Each exoskeleton was instrumented with a strain gauge at the heel spur for ankle torque measurement, an encoder at the ankle joint, and a pressure sensor at the heel to detect heel-strike events.
We used a time-based torque controller [5] to produce target torque profiles with the exoskeletons. The time-based controller consists of four parameters that define the peak magnitude (p1), peak time (p2), rise time (p3), and fall time (p4) of a torque profile. The time parameters were set as % stride duration, and a stride duration was calculated as a running average of the time durations between consecutive heel-strikes. Based on previous studies and for safety, we constrained the parameter space as 10 ≤ p1 ≤ 80 N m, 10 ≤ p2 ≤ 55%, 10 ≤ p3 ≤ 40%, and 5 ≤ p4 ≤ 20%.
We used human-in-the-loop optimization [5] to search for control parameter values that induce faster walking (Fig. 1). For the optimization algorithm, we used a covariance matrix adaptation evolution strategy (CMA-ES) [33], which is a derivative-free optimization algorithm that searches for better values in the parameter space over generations. In each generation, CMA-ES stochastically samples candidate sets of control parameters from a distribution represented by a mean and a covariance matrix and updates the mean and covariance matrix based on the objective function values (self-selected walking speeds in our case) of each parameter set.
We measured self-selected walking speeds using a self-paced treadmill [30]. A self-pacing algorithm adjusted the speed of an instrumented treadmill (Bertec) to match participant walking speed. Walking speed was estimated from the instrumented force-plate data. We instructed participants to walk at a comfortable speed on the self-paced treadmill. During human-in-the-loop optimization, participants walked with a sample control parameter set for one minute and the average treadmill speed during the last five seconds was taken as the self-selected walking speed. This speed measurement protocol was based on our previous study of walking in normal shoes, where we found that participant speed converges after 45 s in about 85% of trials [30], which we also verified in pilot tests with the exoskeleton emulator. In a separate validation session that came after optimization, participants walked in each condition for two minutes, and we took the average speed over the last minute as the self-selected speed. This protocol was chosen based on our previous study, which showed that speeds measured in such a way correlate very well with self-selected overground walking speed in normal shoes (R = 0.93, p = 10−13) [30]. For safety, we set the upper limit of the treadmill speed to a typical walk to run transition speed, which was calculated for each participant as [34], where g is gravity and l is leg length, resulting in speed limits ranging between 2.01 and 2.17 m s−1. We terminated the optimization if the participant reached this limit.
Respirometry data were also collected in validation sessions to calculate the cost of transport and evaluate the quality of the assisted gaits. We calculated metabolic rate [35] from breath-by-breath O2 consumption and CO2 production rates measured with a respirometer (COSMED). We then fit a first-order model to two minutes of instantaneous metabolic rate data to obtain metabolic rate (Ėwalk; W kg−1) for each walking condition [5]. This approach to estimating steady-state metabolic rate has been reported to result in an average error of 4% compared to the typical method of averaging the final three minutes of a six-minute trial [5, cf. Fig. S1], which we considered to be accurate enough for judging the quality of the assisted gaits. We then calculated the cost of transport (Jm−1 kg−1), or the metabolic energy consumed per unit body mass per unit distance traveled, as , where Ėstand is the metabolic rate for quiet standing and v is the self-selected walking speed.
We used apparatus and software that were successfully used in previous studies. We verified in a previous study that self-selected walking speeds on the self-paced treadmill correlate tightly with overground walking speeds for healthy participants walking in normal shoes [30]. And we verified in a previous study that this human-in-the-loop optimization scheme was able to find control parameters for this time-based controller that reduced metabolic energy consumption during walking [5] and running [27] with these ankle exoskeletons
B. Experimental Protocol
Ten healthy adults participated in a three-day experimental protocol. Throughout the experiment, the participants were instructed to ‘walk at a comfortable speed’ on the self-paced treadmill either in regular shoes or wearing the ankle exoskeleton emulators. A familiarization session was performed on the first day for the participants to get used to walking in ankle exoskeletons on a self-paced treadmill. On each of the second and third days, a 72-minute human-in-the-loop optimization session followed by a validation session were conducted. The experimental days were spaced by one to three days for the participants to recover from any fatigue.
The familiarization session was designed to prepare participants to walk on the self-paced treadmill with a wide range of ankle exoskeleton torque profiles. We first asked the participant to explore different speeds on the self-paced treadmill in normal shoes, from very slow speeds up to the preset treadmill speed limit. We then instructed the participant to walk at a comfortable speed in normal shoes, and then in the ankle exoskeletons with Zero Torque. Participants next walked with a wide range of torque profiles: the General Torque (p = [p1, p2, p3, p4] = [0.54 × body mass, 53, 26, 10]), a torque profile with a short rise time ([0.54 × body mass, 53, 10, 10]), a profile with a long rise time ([0.54 × body mass, 53, 40, 10]), and a profile with an early peak time ([0.54 × body mass, 40, 26, 10]). We gradually increased the peak magnitude of each torque profile across three trials; peak magnitude was scaled by 1/3 and 2/3 before testing the full magnitude. General Torque was a profile found in another study that reduced metabolic energy consumption during walking at 1.25 m s−1, and was relatively comfortable to walk with. The other three torque profiles had extreme timing parameters and were included to prepare the participants to walk with various profiles during human-in-the-loop optimization sessions. In pilot tests we found that a profile with an early peak time induced slow walking. We labeled this profile the Sham Torque and included it in validation tests to verify that changes in self-selected speed were the result of the nature of the exoskeleton assistance rather than the simple presence of any input from a device that may have been expected to be assistive.
In the human-in-the-loop optimization sessions, the optimization algorithm searched for control parameters that induced participants to walk faster. We conducted two 72-minute human-in-the-loop optimization sessions, which we expected to be sufficient to find successful solutions based on pilot trials and previous studies [5], [27]. Human-in-the-loop optimization sessions comprised eight generations. Each generation started with a General Torque and then tested eight samples in ascending order of peak torque magnitude, in which the participant walked for one minute in each torque profile. This composition and sample order were designed to ease participants into each new generation. In the first human-in-the-loop optimization session, the initial mean value was set to the General Torque, [p1, p2, p3, p4] = [0.54 × body mass, 53, 26, 10], and the initial covariance matrix was set to a diagonal matrix with the diagonal elements of [10, 10, 5, 5]. The second human-in-the-loop optimization session continued from the end of the first session. Optimization was terminated early if any of the samples in a generation induced the participant to walk at the treadmill speed limit.
During validation sessions, we evaluated the effect of the torque profiles found in the human-in-the-loop optimization sessions. We instructed the participants to walk at comfortable speeds in five conditions: Normal Shoes, Zero Torque, Optimized Torque, General Torque, and Sham Torque. The trials were conducted in randomized double-reversal order, where six minutes of quiet standing (S) were conducted before the reversed order trials (ABCDE-S-EDCBA). Before randomizing other conditions, the Normal Shoes condition was randomly assigned either as the first (A) or the last (E) condition to minimize the donning and doffing of the exoskeletons. Participants were not informed as to which exoskeleton condition was applied and experimenters were careful not to provide any verbal or non-verbal cues. The participants walked for two minutes in each of the ten trials.
C. Participants
Ten healthy adults (6 females and 4 males; height: 1.69 ± 0.05 m; mass: 63 ± 7 kg; age: 27 ± 3 years) participated in the experiment. The sample size was chosen based on previous studies [5], [27]. One participant did not walk with Sham Torque in the final validation session due to experimenter error. All participants provided written informed consent before participating, after the nature and possible consequences of the study were explained. The study was approved by the Stanford University Institutional Review Board.
D. Statistical Analysis
The statistical significance of differences across walking conditions, in terms of self-selected walking speed, cost of transport, other gait features, and exoskeleton assistance features, was tested using two-way analysis of variance (ANOVA) accounting for condition and participant. Gait features included maximum plantarflexion and dorsiflexion angles, stride length and duration, toe-off time, and step width variability. Assistance features were peak torque magnitude and time, peak power, and network rate. If a significant effect of walking condition was found in ANOVA, we compared pairs of conditions using the Tukey’s Honestly Significant Difference (Tukey HSD) test. We used a significance level of α = 0.05 for both ANOVA and Tukey HSD.
We also evaluated the correlation between exoskeleton assistance and self-selected walking speeds. We computed the square of Pearson’s linear correlation coefficient (R2) between walking speed and exoskeleton mechanics. The exoskeleton mechanics we tested were peak torque magnitude (p1, N m kg−1), peak torque time (p2, % stride), torque rise time (p3, % stride), torque fall time (p4, % stride), exoskeleton peak power (W kg−1) and exoskeleton network rate (J kg−1 s−1). We also calculated the correlation coefficient for the linear regression using all four torque parameters p = [p1, p2, p3, p4]. The R2 value represents the proportion of the variance in walking speed explained by a linear model with the corresponding variable or variables, where 1 means the fitted linear model perfectly captures the variance in speed. We considered the linear fit and correlation values to be statistically significant if their p-value was smaller than 0.05.
III. Results
A. Baseline Walking Characteristics
We tested two baseline walking conditions: Normal Shoes, in which participants walked without the exoskeleton; and Zero Torque, in which participants walked with the exoskeleton while it applied no torque. Wearing the exoskeleton with no torque did not have a significant effect on self-selected walking speed or cost of transport. Self-selected walking speed with Normal Shoes was 1.31 ± 0.17 m s−1 (mean ± standard deviation) and with Zero Torque was 1.27 ± 0.19 m s−1 (Fig. 2–(a)). Cost of transport with Normal Shoes was 2.43 ± 0.68 Jm−1kg−1 and with Zero Torque was 2.63 ± 0.50 Jm−1kg−1 (Fig. 4–(a)).
Fig. 2.
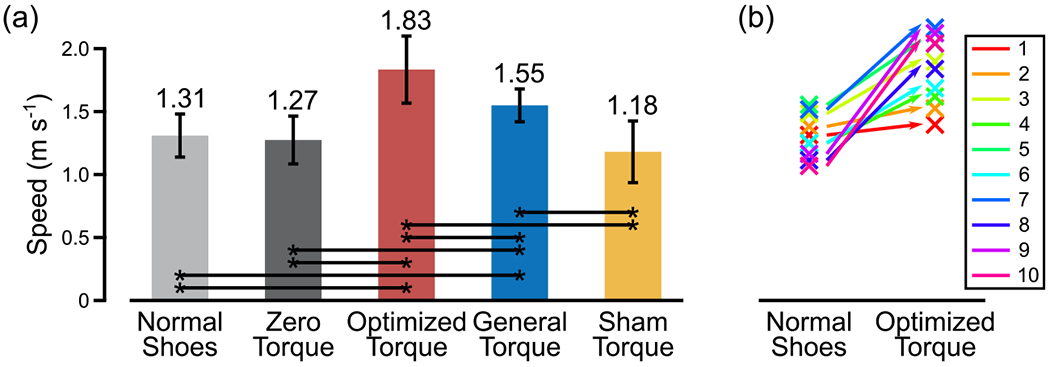
Self-selected walking speed. (a) Mean (bars) and standard deviation (whiskers) of self-selected walking speed under each condition. Lines with asterisks denote statistically significant differences (Tukey HSD, α = 0.05). (b) Changes in walking speed between Normal Shoes and Optimized Torque conditions for individual participants. Participant numbers are in order of percent change in speed, where Participant 1 showed the smallest increase (6%) and Participant 10 showed the largest (91%). Participant numbers are consistent with Figs. 3 and 4.
Fig. 4.
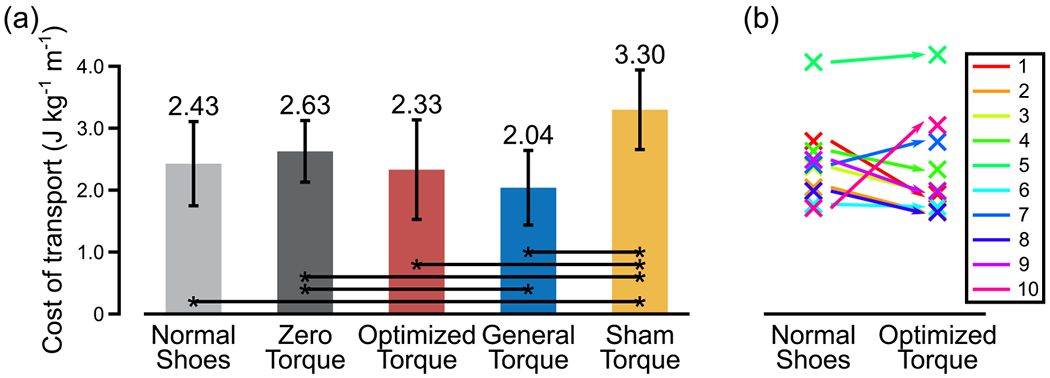
Metabolic cost of transport. (a) Mean (bars) and standard deviation (whiskers) of the cost of transport measured during walking with Normal Shoes, Zero Torque, Optimized Torque, General Torque, and Sham Torque. Lines with asterisks denote statistically significant differences (Tukey HSD, α = 0.05). (b) Changes in the cost of transport between Normal Shoes and Optimized Torque conditions for individual participants. Responses ranged from a 31% decrease to a 78% increase.
B. Self-Selected Walking Speed
We tested three conditions in which the ankle exoskeleton applied torque: Optimized Torque, in which we applied the speed-optimized torque pattern identified using human-in-the-loop optimization; General Torque, in which we applied a torque pattern previously optimized for metabolic energy consumption during walking at 1.25 m s−1; and Sham Torque, in which we applied a torque with the same peak magnitude as in General Torque but an earlier timing, which induced slow walking in pilot tests.
Ankle exoskeleton assistance had a significant effect on self-selected walking speed (ANOVA, p = 6 × 10−11; Fig. 2–(a); Movie S1 and S2). Participants walked substantially faster with torque optimized for speed; self-selected walking speed was 42% faster with Optimized Torque than in Normal Shoes, on average (Tukey HSD, p = 3 × 10−8). All participants walked faster with Optimized Torque than in Normal Shoes, with speed increases ranging from 6% to 91% (Fig. 2–(b)). Four participants reached the treadmill speed limits we set for safety during the optimization (resulting in early termination) and the final validation session, with self-selected speeds of 2.09 ± 0.04 m s−1. With General Torque, participants walked faster than in Normal Shoes (Tukey HSD, p = 7 × 10−3) but slower than with Optimized Torque (Tukey HSD, p = 10−3). Participants walked slower with the Sham Torque than with either Optimized Torque or General Torque (Tukey HSD, p < 9 × 10−5). These results demonstrate that ankle exoskeleton torque can have a strong effect on self-selected walking speed, and that well-selected torque patterns can facilitate a large increase in speed.
C. Optimized Torques and Gait Features
Torques optimized for speed varied across participants (Fig. 3–(a)), while the means of peak torque magnitude and peak time were significantly different from those of the General Torque and Sham Torque (Tukey HSD, p < 9 × 10−3; Table I). Self-selected walking speed was linearly correlated with the peak magnitude (R2 = 0.49, p = 0.03) and peak time (R2 = 0.58, p = 0.01) of Optimized Torque across participants (Fig. 3–(g), (h)), but none of the torque features were significantly correlated with the change in speed compared to Normal Shoes (Table S1).
Fig. 3.
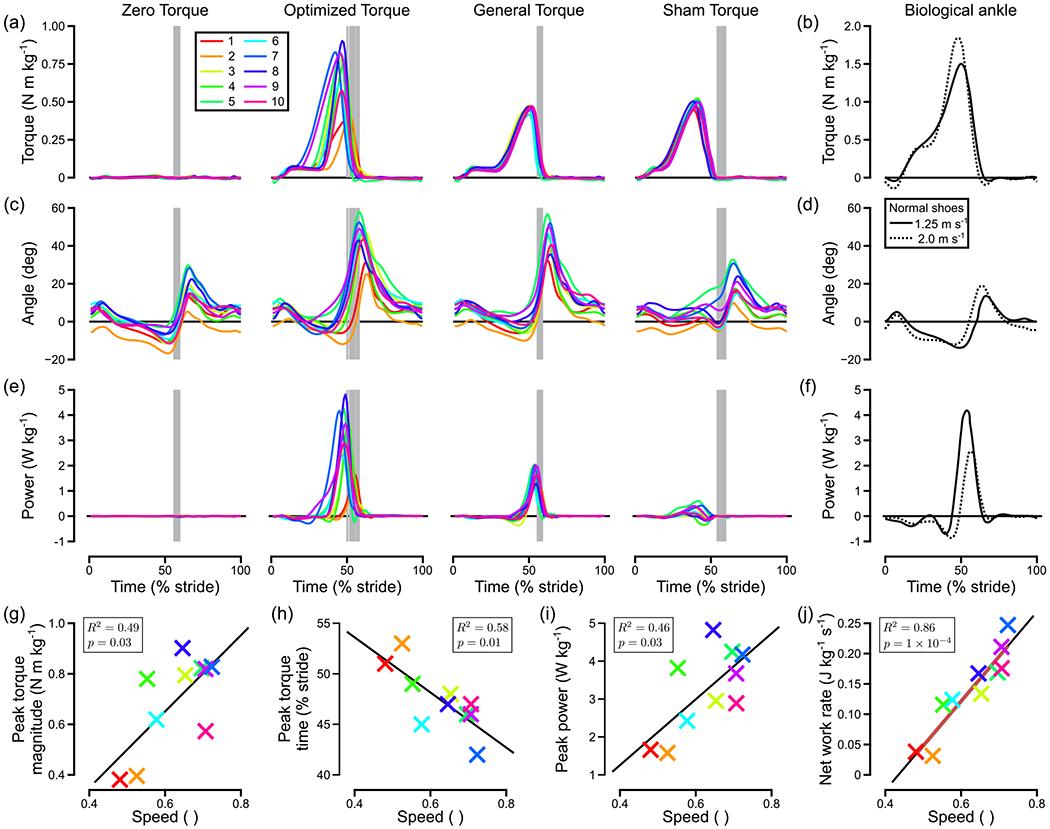
Exoskeleton mechanics. (a) Ankle exoskeleton torque measured during walking with Zero Torque, Optimized Torque, General Torque, and Sham Torque. Torques are normalized to body mass. X-axes represent heel-strike to heel-stride, and the vertical gray lines indicate toe-off, which varied across participants. (b) Biological ankle torque during normal and fast walking in normal shoes reported in [36]. Note the different scale of the y-axis from that of exoskeleton torques. (c) Exoskeleton joint angle measured during walking. Exoskeleton joint angle may not be identical to biological ankle angle because of misalignment between the axes of rotation [32]. An angular threshold for applying torque was set based on each participant’s range of motion for safety. (d) Biological ankle angle during normal and fast walking in normal shoes reported in [36]. (e) Exoskeleton ankle power calculated by multiplying torque by joint velocity and normalized to body mass. (f) Biological ankle power during normal and fast walking in normal shoes reported in [36]. (g)–(j) Correlation between self-selected walking speed and mechanics of optimized exoskeleton assistance (peak torque magnitude, peak torque time, peak power magnitude, and network rate). Walking speed is nondimensionalized as (g: gravitational acceleration, l: leg length) to compensate for different leg lengths. The black lines and boxes show the fitted linear models and their square of correlation coefficients (R2) and p-values (p). Network rate is calculated as the time integral of power normalized to body mass divided by stride time. The correlation analysis between all the exoskeleton mechanics values and self-selected walking speed and speed changes from Normal Shoes are reported in Table S1.
TABLE I.
Exoskeleton Torque Characteristics and Human Gait Features. Exoskeleton Condition Had a Significant Effect for Each of These Outcomes (ANOVA, p < 2 × 10−6) Except for Step Width Variability (ANOVA, p = 0.24). Net Work Rate Was Calculated as the Integral of Power Over Time for a Stride, Divided by Stride Duration
| Peak torque magnitude (N m kg−1) | Peak torque time (% stride) | Peak power (W kg−1) | Net work rate (J kg−1 s−1) | Max plantar flexion (°) | Max dorsiflexion (°) | Stride length (m) | Stride duration (s) | Toe-off time (% stride) | step width variability (%) | |
|---|---|---|---|---|---|---|---|---|---|---|
| Normal Shoes | - | - | - | - | - | - | 1.35 ± 0.14 | 1.04 ± 0.06 | 58 ± 1 | 11 ± 5 |
| Zero Torque | 0.01 ± 0.00 | - | 0.01 ± 0.00 | −0.00 ± 0.00 | 18 ± 7 | 9 ± 4 | 1.34 ± 0.16 | 1.06 ± 0.06 | 58 ± 1 | 9 ± 3 |
| Optimized Torque | 0.69 ± 0.19 | 47 ± 3 | 3.22 ± 1.11 | 0.14 ± 0.07 | 44 ± 10 | 4 ± 4 | 1.54 ± 0.16 | 0.85 ± 0.12 | 55 ± 2 | 12 ± 8 |
| General Torque | 0.45 ± 0.02 | 50 ± 1 | 1.78 ± 0.24 | 0.05 ± 0.01 | 44 ± 8 | 3 ± 4 | 1.50 ± 0.11 | 0.97 ± 0.06 | 57 ± 1 | 12 ± 8 |
| Sham Torque | 0.49 ± 0.02 | 40 ± 1 | 0.27 ± 0.19 | 0.01 ± 0.01 | 20 ± 8 | 2 ± 3 | 1.21 ± 0.20 | 1.03 ± 0.07 | 57 ± 2 | 7 ± 4 |
Several gait features changed when walking with exoskeleton torques optimized for speed (Fig. 3–(c) and Table I). Maximum plantarflexion angle substantially increased with Optimized Torque and General Torque compared to Zero Torque (Tukey HSD, p < 4 × 10−9). Maximum dorsiflexion angle decreased in all conditions with exoskeleton torque compared to Zero Torque (Tukey HSD, p < 10−5). With Optimized Torque, stride length was longer than all conditions except General Torque (Tukey HSD, p < 2 × 10−3), whereas stride duration was shorter (Tukey HSD, p < 2 × 10−4) and toe-off occurred earlier in stride (Tukey HSD, p < 7 × 10−5) compared to all other conditions.
Differences in exoskeleton torque and ankle adaptation resulted in differences in mechanical power and network rate (Fig. 3–(e) and Table I). The peak power and network rate with Optimized Torque were larger than with the other torque conditions (Tukey HSD, p < 3 × 10−5). Although their peak torque magnitudes were the same, the peak power with the General Torque was significantly larger than that with the Sham Torque (Tukey HSD, p < 2 × 10−5). Self-selected walking speed was correlated with both peak power (R2 = 0.46, p = 0.03) and network rate (R2 = 0.86, p = 1 × 10−4) with Optimized Torque across participants (Fig. 3–(i), (j)). Only network rate was correlated with increase in speed compared to Normal Shoes (R2 = 0.51, p = 0.02, Table S1).
D. Metabolic Cost of Transport
The effect of Optimized Torque on the metabolic cost of transport highly varied across participants. While cost of transport with Optimized Torque was not significantly different from that with Normal Shoes on average (Tukey HSD, p = 0.98), changes ranged from a 78% increase to a 31% reduction for different participants (Fig. 4). Cost of transport increased by 15% and 78% for two participants, changed by less than 10% for two participants, and decreased by an average of 19% for the other six participants. The cost of transport with General Torque was lower than that with Normal Shoes for all participants, with decreases ranging from 0.4% to 35%, although this effect was not statistically significant (Tukey HSD, p = 0.14). By contrast, the cost of transport with Sham Torque was higher for all participants, with increases ranging from 6% to 77% and an average increase of 40% (Tukey HSD, p = 9 × 10−5).
IV. Discussion
A. Self-Selected Walking Speed
We found that ankle exoskeleton assistance can substantially increase self-selected walking speed. Optimized Torques found through human-in-the-loop optimization induced participants to walk 0.52 m s−1 (42%) faster than in Normal Shoes. This is a large increase in self-selected walking speed, about three times the minimal clinically important difference for older adults and individuals with chronic stroke [20], [21]. Speed increased in all ten participants, and four participants reached treadmill speed limits, which were set to typical walk-to-run transition speeds. These results demonstrate that, with appropriate training and optimization, ankle exoskeletons can induce young healthy adults to walk at fast speeds.
Different exoskeleton torque patterns induced different walking speeds. Optimized Torque led to faster walking than in any other condition. General Torque, which had similar peak time but smaller peak magnitude than most Optimized Torque patterns, led participants to walk slower than with Optimized Torque but faster than with Normal Shoes or Sham Torque. The Sham Torque, which had the same peak magnitude as General Torque but an earlier peak time, led participants to walk slower than in the other torque conditions. These results show that both the magnitude and timing of ankle exoskeleton torque have a strong effect on walking speed.
Participants perhaps chose to walk at speeds that were good, if not optimal, for multiple objective factors such as energy economy, stability, comfort, and endurance. While the same factors could be important in walking in both normal shoes and exoskeletons, their effect may not be the same. For instance, stability and comfort levels may not change much when deviating from the preferred speed during normal walking, but may vary substantially when walking with some exoskeleton torques, possibly becoming the determining factors for selecting speed. An experiment that evaluates individual objective factors during walking on a treadmill for a range of fixed speeds would help identify determining factors.
Allowing participants to self-select their walking speed could be important in exoskeleton research. Many lower-limb exoskeleton studies are conducted on a treadmill because it facilitates complete biomechanics measurements and use of immobile experimental devices. The treadmill is typically set to move at a constant speed, which constrains walking speed and influences other speed-dependent gait features [37]. Our study shows that exoskeleton assistance can unexpectedly affect walking speed. For example, General Torque was previously found to reduce metabolic energy consumption during walking on a treadmill moving at 1.25 m s−1. However, when participants were free to choose their speed on a self-paced treadmill, they not only walked faster, the speeds varied across participants from 1.38 to 1.76 m s−1; thus no single speed would capture their preferred speeds and dependent features. A fix-speed treadmill is useful to constrain speed and isolate the effects of exoskeleton assistance on gait features other than speed. However, self-paced treadmills [31] would allow more ecologically valid assessments of gait assistance devices.
Factors that were not controlled in our study may have unexpectedly affected self-selected walking speed. For instance, walking speed can be affected by the visual environment [38], auditory stimulation [39], and verbal instructions [40]. Despite variations in these contextual components, we previously verified that a self-paced treadmill test, in which we instruct participants to walk at their comfortable speed on this self-paced treadmill, is a reliable way to measure self-selected walking speed in normal shoes by comparing it to a standard 10-meter walk test [30]. Comparing treadmill and overground walking speeds when walking with the ankle exoskeletons would allow us to assess whether other factors, such as comfort and stability, interact with exoskeleton assistance to affect self-selected walking speed on the self-paced treadmill. While we could not conduct such a comparison with the tethered exoskeleton emulators, we did not find any evidence to suggest that self-paced treadmill and overground walking differ more in exoskeletons than in normal shoes, and all participants found changing speed on the self-paced treadmill in exoskeletons as comfortable as in normal shoes.
There is much to be done before the findings of this study can be transferred to devices that help individuals with slow preferred walking speed in a community setting. A next step is to conduct a similar experiment with older adults and others with reduced walking speed. In Sec. IV–C, we discuss modifying the experimental protocol to be less demanding and adjusting the optimization method to target more practical assistance. Another major step will be developing a mobile exoskeleton that can realize the required assistance. Studies on how mass added to different body parts affects preferred walking speed would be instructive for designing such a mobile exoskeleton.
B. Optimized Torques and Gait Features
Exoskeleton assistance optimized for speed had a strong but complex relationship with speed. Optimized Torque had relatively high ankle push-off assistance relatively late in stance, providing high net mechanical work and seeming to lead to longer step length, higher step frequency, and faster walking (Table I). However, speed changes (Δv in Table S1) were not correlated with any of the four torque parameters or peak exoskeleton power. Exoskeleton network rate correlated with speed changes (R2 = 0.51, p = 0.02), but is likely due in part to the high correlation between network rate and walking speed (R2 = 0.86, p = 1 × 10−4, Fig. 3–(j), in Table S1). The correlations between exoskeleton mechanics with Optimized Torque and self-selected walking speed were consistent with the dynamics of fast walking (Fig. 3–(g)–(j)); larger torque was applied with earlier timing for faster walking, which is consistent with the larger push-off torque and shorter stance phase of fast walking in Normal Shoes (Fig. 3–(b)). The strong correlation between network rate and walking speed may be expected, given that it reflects larger torque magnitudes and ankle motions alongside increased step frequency in fast walking.
The relationship between speed and other gait characteristics was also unclear (Fig. 5). While the relationship between step length and speed while walking with Optimized Torque was consistent with that during walking in normal shoes [41], [42] for six participants, four participants walked with much shorter steps for their speeds. These participants with shorter steps, Participants 3, 6, 7 and 10, seemed to have adapted to uncomfortable gaits based on visual inspection (Movie S2). These uncomfortable gaits may be partially responsible for the large increases in cost of transport observed for Participants 7 and 10 (15% and 78%), but would not explain the 16% reduction in cost of transport for Participant 3. An increase in walking speed is often associated with reduced stability [10], but we could not find any clear trend between speed and commonly used stability measures, such as step-to-step variability in step width, length, time and speed [43], [44]. Gaits with shorter steps that seemed uncomfortable were also not associated with higher step-to-step variability. Interpreting the effects of exoskeleton assistance on gait characteristics in our study is difficult due to the large variance in walking speed and torque assistance across subjects. A more comprehensive data collection from speed-controlled experiments and computational analysis that accounts for musculoskeletal dynamics [45] may be necessary to fully understand the effects of assistance torques on gait features.
Fig. 5.
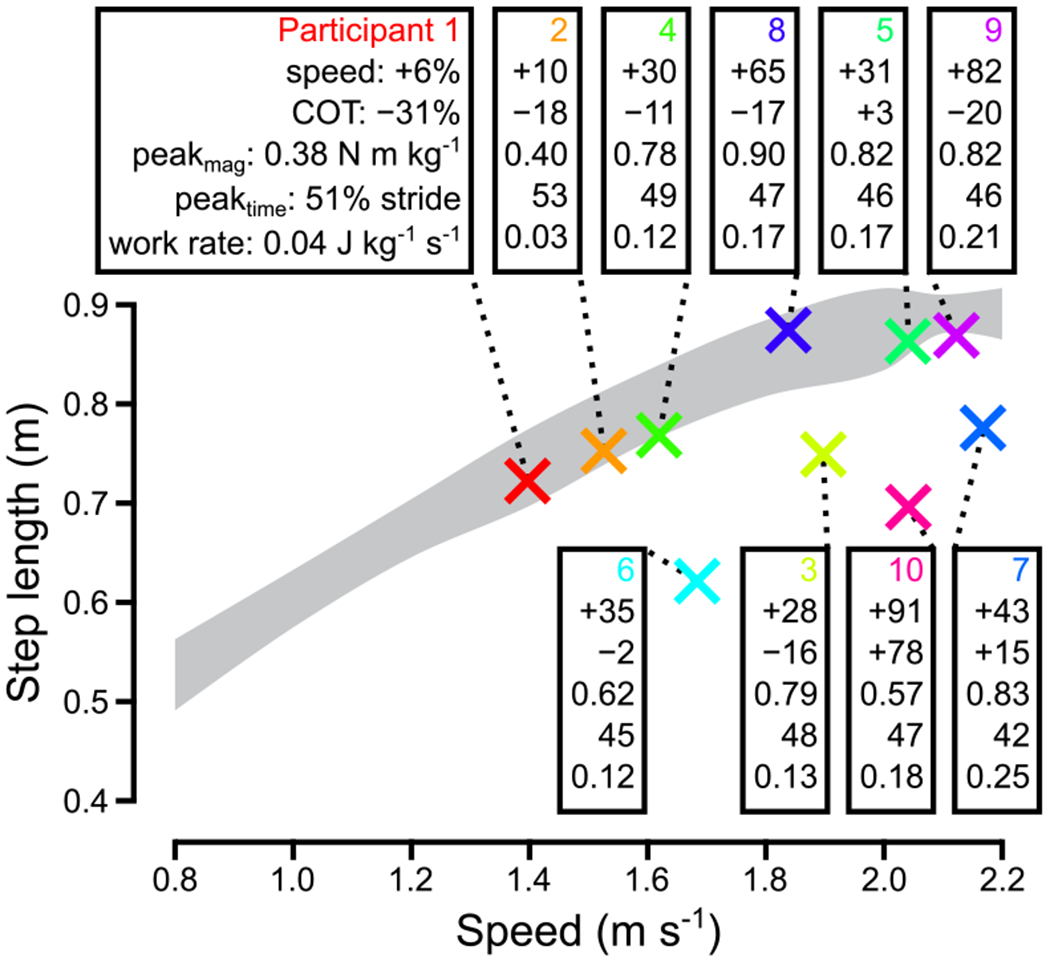
Step length versus walking speed for individual participants. Each data point indicates average step length and walking speed with Optimized Torque for one participant. Boxes provide the change in speed relative to Normal Shoes, change in cost of transport relative to Normal Shoes, peak torque magnitude with Optimized Torque (peakmag), peak time with Optimized Torque (peaktime), and network rate for the associated participant. The gray shaded area indicates ±1 standard deviation for healthy adults in normal shoes reported in [41].
C. Human-in-the-Loop Optimization Protocol
Human-in-the-loop optimization successfully identified ankle exoskeleton assistance torques that induced faster walking. Similar human-in-the-loop optimization protocols, with the same optimization algorithm and time-based ankle exoskeleton controller, have been used in previous studies to reduce metabolic energy consumption during walking [5] and running [27]. The key to adapting this protocol for speed was developing a means for reliably estimating speed while participants walked with sampled torque profiles. We adopted a simple way of estimating self-selected speed, which is to instruct participants to walk at their comfortable speed on a self-paced treadmill and measuring the treadmill speed [30]. That human-in-the-loop optimization can be used to improve both speed and energy economy suggests it is a powerful tool for identifying control parameters that enhance performance generally, provided that the outcome of interest can be quantified and estimated in real time.
Better familiarization and training strategies may achieve more effective and consistent speed enhancement. It seemed like some participants found it difficult to walk when the ankle exoskeletons applied high torques. For instance, during human-in-the-loop optimization sessions, Participants 1 and 2 either skipped or walked slowly and with unnatural gaits in torque profiles that had higher magnitudes than General Torque (peak: 0.54 N m kg−1), stating that those were uncomfortable. The resulting Optimized Torques therefore had low peak magnitudes (0.38 and 0.40 N m kg−1), and self-selected speeds increased by only 6% and 10%. Similarly, Participants 3, 6, 7 and 10 walked fast but with unnatural and perhaps uncomfortable gaits that may not be sustainable for long bouts. While our study did not focus on comfort or energy, exoskeletons that cause discomfort or fatigue would not be practical for daily use. A familiarization session that consists of torque profiles with high magnitudes may prepare participants for more effective optimization. Guiding participants to explore gaits that may be more comfortable, for example instructing to try longer steps, during human-in-the-loop optimization sessions could also prevent participants from adopting uncomfortable gait patterns. We did not provide such guidance in our study because it could have biased participants’ walking speeds, but coaching would likely lead to more effective training and optimization when developing devices for practical use.
We may also be able to develop a more time-efficient human-in-the-loop optimization process based on the understanding of optimal torque profiles developed here. In our study, participants walked in two 72-minute human-in-the-loop optimization sessions, which may be difficult to complete for people with gait pathologies. This process could become shorter if it used a seed and search space that were closer to the optimal torque profiles. Although Optimized Torques varied across participants, those for Participants 5 and 9 had very similar peak magnitudes and times, and induced them to walk at maximum speed with typical stride lengths (Fig. 5). Further experiments could identify key features of torque profiles for faster walking. Neuromechanical simulations that capture key principles of human locomotion control and musculoskeletal dynamics [46], [47] might also be used to provide effective search space or identify improved control parameterizations, which could further improve the human-in-the-loop optimization process, particularly for new devices or activities. However, sufficient time and experience with exoskeletons seems necessary to facilitate motor learning of the user to garner a benefit from an exoskeleton. More efficient human-in-the-loop optimization should be accompanied by more effective training strategies.
Multi-objective human-in-the-loop optimization could be more effective for finding exoskeleton assistance strategies that are practical for daily life. We found that exoskeletons can induce faster walking in various ways, where some can have undesirable effects on other measures. For example, Participant 10 walked at maximum treadmill speed but with a 78% increase in cost of transport and abnormally short steps (Fig. 5). Simultaneously considering all relevant performance measures would avoid this type of outcome. During natural walking, a person may want to reach a target location in a minimum amount of time with minimum effort, safely and comfortably. The time required can be directly reduced by increasing locomotion speed as done in this study. Effort could be reduced by decreasing either metabolic energy or muscle fatigue, which are correlated [48] and seem to be critical in shaping human gait [13], [49]. Metabolic energy consumption can be relatively easily estimated from respiratory data [5], [6], while measuring muscle fatigue of the whole body during locomotion is less practiced. Safety and comfort may be less straightforward to quantify and measure. While step-to-step variability is often used as a measure for stability and balance [43], [44], we did not find a clear trend in our results between step variability and our subjective assessment of stability and comfort, based on participant feedback and experimenter observations. Nonetheless, we could avoid extreme cases by skipping torque patterns that feel too uncomfortable. Deterioration of stability or comfort may also be partially reflected in changes in metabolic energy consumption [50], [51]. Therefore, a combination of speed and energy seems to be a simple but promising multi-objective function that could be used for human-in-the-loop optimization. While our results show that it is possible to enhance both speed and energy efficiency simultaneously (Fig. 6), the effectiveness of a multi-objective human-in-the-loop optimization for finding practical exoskeleton controllers remains future work.
Fig. 6.
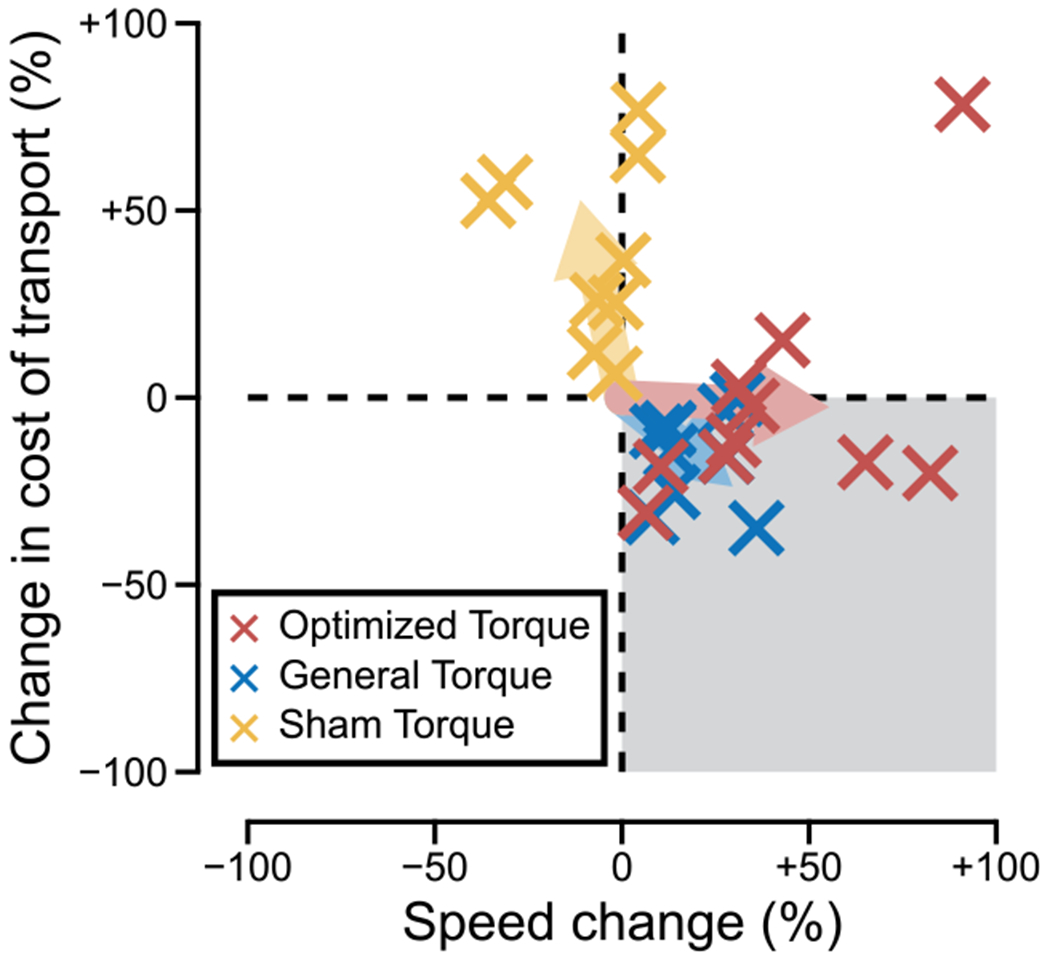
Change in self-selected walking speed and cost of transport. Arrows show the mean changes for each condition. The gray shaded area indicates increase in speed and reduction in cost of transport, which would be desirable for practical exoskeleton assistance.
V. Conclusion
We demonstrated that it is possible to substantially increase self-selected walking speed with ankle exoskeletons. We also showed that human-in-the-loop optimization specifically targeted to enhance speed is effective in finding such torque assistance patterns. With exoskeleton assistance optimized for speed, participants walked 42% faster than in normal shoes. The characteristics of walking with the speed-optimized exoskeleton assistance varied strongly across participants. For instance, among participants who walked at maximum treadmill speeds (2.04–2.17 m s−1) with the optimized assistance, metabolic energy cost increased greatly for some (+78%) and reduced substantially in others (−20%). Such observations suggest that focusing solely on one performance measure, such as speed, would not be sufficient for developing practical exoskeleton controllers. It also shows that it is possible to improve both speed and energy economy considerably with ankle exoskeletons, which is especially promising for people who walk slowly due to aging or gait disorder.
Supplementary Material
Acknowledgment
The authors thank Chris Atkeson for discussions on the results and Katherine Poggensee and Michael Raitor for discussions about the experimental protocol.
This work was supported in part by the National Science Foundation under Grant CMMI-1734449 and in part by the National Institutes of Health under Grant K99AG065524.
This work involved human subjects or animals in its research. Approval of all ethical and experimental procedures and protocols was granted by the Stanford University Institutional Review Board.
Footnotes
This article has supplementary downloadable material available at https://doi.org/10.1109/TNSRE.2021.3074154, provided by the authors.
References
- [1].Esquenazi A, Talaty M, and Jayaraman A, “Powered exoskeletons for walking assistance in persons with central nervous system injuries: A narrative review,” PM&R, vol. 9, no. 1, pp. 46–62, January. 2017. [DOI] [PubMed] [Google Scholar]
- [2].Riener R, “The cybathlon promotes the development of assistive technology for people with physical disabilities,” J. Neuroeng. Rehabil, vol. 13, no. 1, p. 49, December. 2016. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [3].Malcolm P, Derave W, Galle S, and De Clercq D, “A simple exoskeleton that assists plantarflexion can reduce the metabolic cost of human walking,” PLoS ONE, vol. 8, no. 2, Feb. 2013, Art. no. e56137. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [4].Mooney LM and Herr HM, “Biomechanical walking mechanisms underlying the metabolic reduction caused by an autonomous exoskeleton,” J. Neuroeng. Rehabil, vol. 13, no. 1, December. 2016. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [5].Zhang J et al. , “Human-in-the-loop optimization of exoskeleton assistance during walking,” Science, vol. 356, no. 6344, pp. 1280–1284, June. 2017. [DOI] [PubMed] [Google Scholar]
- [6].Ding Y, Kim M, Kuindersma S, and Walsh CJ, “Human-in-the-loop optimization of hip assistance with a soft exosuit during walking,” Sci. Robot, vol. 3, no. 15, February. 2018, Art. no. eaar5438. [DOI] [PubMed] [Google Scholar]
- [7].Lim B et al. , “Delayed output feedback control for gait assistance with a robotic hip exoskeleton,” IEEE Trans. Robot, vol. 35, no. 4, pp. 1055–1062, August. 2019. [Google Scholar]
- [8].Sawicki GS, Beck ON, Kang I, and Young AJ, “The exoskeleton expansion: Improving walking and running economy,” J. Neuroeng. Rehabil, vol. 17, no. 1, pp. 1–9, December. 2020. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [9].Fritz S and Lusardi M, “White paper:‘Walking speed: The sixth vital sign,’” J. Geriatric Phys. Therapy, vol. 32, no. 2, pp. 2–5, 2009. [PubMed] [Google Scholar]
- [10].Kang HG and Dingwell JB, “Effects of walking speed, strength and range of motion on gait stability in healthy older adults,” J. Biomech, vol. 41, no. 14, pp. 2899–2905, October. 2008. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [11].Latt MD, Menz HB, Fung VS, and Lord SR, “Walking speed, cadence and step length are selected to optimize the stability of head and pelvis accelerations,” Exp. Brain Res, vol. 184, no. 2, pp. 201–209, November. 2007. [DOI] [PubMed] [Google Scholar]
- [12].Neptune RR, Sasaki K, and Kautz SA, “The effect of walking speed on muscle function and mechanical energetics,” Gait Posture, vol. 28, no. 1, pp. 135–143, July. 2008. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [13].Song S and Geyer H, “Predictive neuromechanical simulations indicate why walking performance declines with ageing,” J. Physiol, vol. 596, no. 7, pp. 1199–1210, Apr. 2018. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [14].Olney SJ and Richards C, “Hemiparetic gait following stroke. Part I: Characteristics,” Gait Posture, vol. 4, no. 2, pp. 136–148, April. 1996. [Google Scholar]
- [15].Cruz TH, Lewek MD, and Dhaher YY, “Biomechanical impairments and gait adaptations post-stroke: Multi-factorial associations,” J. Biomech, vol. 42, no. 11, pp. 1673–1677, August. 2009. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [16].Ekström H, Dahlin-Ivanoff S, and Elmståhl S, “Effects of walking speed and results of timed get-up-and-go tests on quality of life and social participation in elderly individuals with a history of osteoporosis-related fractures,” J. Aging Health, vol. 23, no. 8, pp. 1379–1399, December. 2011. [DOI] [PubMed] [Google Scholar]
- [17].Kohn CG, Baker WL, Sidovar MF, and Coleman CI, “Walking speed and health-related quality of life in multiple sclerosis,” Patient-Patient-Centered Outcomes Res., vol. 7, no. 1, pp. 55–61, 2014. [DOI] [PubMed] [Google Scholar]
- [18].Lee H-J et al. , “A wearable hip assist robot can improve gait function and cardiopulmonary metabolic efficiency in elderly adults,” IEEE Trans. Neural Syst. Rehabil. Eng, vol. 25, no. 9, pp. 1549–1557, September. 2017. [DOI] [PubMed] [Google Scholar]
- [19].Awad LN, Kudzia P, Revi DA, Ellis TD, and Walsh CJ, “Walking faster and farther with a soft robotic exosuit: Implications for post-stroke gait assistance and rehabilitation,” IEEE Open J. Eng. Med. Biol, vol. 1, pp. 108–115, 2020. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [20].Perera S, Mody SH, Woodman RC, and Studenski SA, “Meaningful change and responsiveness in common physical performance measures in older adults,” J. Amer. Geriatrics Soc, vol. 54, no. 5, pp. 743–749, May 2006. [DOI] [PubMed] [Google Scholar]
- [21].Tilson JK et al. , “Meaningful gait speed improvement during the first 60 days poststroke: Minimal clinically important difference,” Phys. Therapy, vol. 90, no. 2, pp. 196–208, February. 2010. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [22].Tamburella F et al. , “Neuromuscular controller embedded in a powered ankle exoskeleton: Effects on gait, clinical features and subjective perspective of incomplete spinal cord injured subjects,” IEEE Trans. Neural Syst. Rehabil. Eng, vol. 28, no. 5, pp. 1157–1167, May 2020. [DOI] [PubMed] [Google Scholar]
- [23].Lee H-J et al. , “Training for walking efficiency with a wearable hipassist robot in patients with stroke: A pilot randomized controlled trial,” Stroke, vol. 50, no. 12, pp. 3545–3552, 2019. [DOI] [PubMed] [Google Scholar]
- [24].Gordon KE and Ferris DP, “Learning to walk with a robotic ankle exoskeleton,” J. Biomech., vol. 40, no. 12, pp. 2636–2644, January. 2007. [DOI] [PubMed] [Google Scholar]
- [25].Wu AR et al. , “An adaptive neuromuscular controller for assistive lower-limb exoskeletons: A preliminary study on subjects with spinal cord injury,” Frontiers Neurorobot, vol. 11, p. 30, June. 2017. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [26].Koller JR, Gates DH, Ferris DP, and Remy CD, “‘Body-in-the-loop’ optimization of assistive robotic devices: A validation study,” in Proc. Robot. Sci. Syst., 2016, pp. 1–10. [Google Scholar]
- [27].Witte KA, Fiers P, Sheets-Singer AL, and Collins SH, “Improving the energy economy of human running with powered and unpowered ankle exoskeleton assistance,” Sci. Robot, vol. 5, no. 40, March. 2020, Art. no. eaay9108. [DOI] [PubMed] [Google Scholar]
- [28].Dal U, Erdogan T, Resitoglu B, and Beydagi H, “Determination of preferred walking speed on treadmill may lead to high oxygen cost on treadmill walking,” Gait Posture, vol. 31, no. 3, pp. 366–369, March. 2010. [DOI] [PubMed] [Google Scholar]
- [29].Plotnik M et al. , “Self-selected gait speed-over ground versus self-paced treadmill walking, a solution for a paradox,” J. Neuroeng. Rehabil, vol. 12, no. 1, p. 20, 2015. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [30].Song S, Choi H, and Collins SH, “Using force data to self-pace an instrumented treadmill and measure self-selected walking speed,” J. Neuroeng. Rehabil, vol. 17, no. 1, pp. 1–14, December. 2020. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [31].Self-Paced-Treadmill Repository. Accessed: Apr. 1, 2020. [Online]. Available: https://github.com/smsong/self-paced-treadmill
- [32].Witte KA, Zhang J, Jackson RW, and Collins SH, “Design of two lightweight, high-bandwidth torque-controlled ankle exoskeletons,” in Proc. IEEE Int. Conf. Robot. Autom. (ICRA), May 2015, pp. 1223–1228. [Google Scholar]
- [33].Hansen N, “The CMA evolution strategy: A comparing review,” in Towards a New Evolutionary Computation. Berlin, Germany: Springer, 2006, pp. 75–102. [Google Scholar]
- [34].Kram R, Domingo A, and Ferris DP, “Effect of reduced gravity on the preferred walk-run transition speed,” J. Exp. Biol, vol. 200, no. 4, pp. 821–826, 1997. [DOI] [PubMed] [Google Scholar]
- [35].Brockway JM, “Derivation of formulae used to calculate energy expenditure in man,” Hum. Nutrition. Clin. Nutrition, vol. 41, no. 6, pp. 463–471, 1987. [PubMed] [Google Scholar]
- [36].Zelik KE and Kuo AD, “Human walking isn’t all hard work: Evidence of soft tissue contributions to energy dissipation and return,” J. Exp. Biol, vol. 213, no. 24, pp. 4257–4264, December. 2010. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [37].Cappellini G, Ivanenko YP, Poppele RE, and Lacquaniti F, “Motor patterns in human walking and running,” J. Neurophysiol, vol. 95, no. 6, pp. 3426–3437, June. 2006. [DOI] [PubMed] [Google Scholar]
- [38].Mohler BJ, Thompson WB, Creem-Regehr SH, Pick HL, and Warren WH, “Visual flow influences gait transition speed and preferred walking speed,” Exp. Brain Res, vol. 181, no. 2, pp. 221–228, August. 2007. [DOI] [PubMed] [Google Scholar]
- [39].McIntosh GC, Brown SH, Rice RR, and Thaut MH, “Rhythmic auditory-motor facilitation of gait patterns in patients with Parkinson’s disease,” J. Neurol., Neurosurg. Psychiatry, vol. 62, no. 1, pp. 22–26, January. 1997. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [40].Brinkerhoff SA, Murrah WM, Hutchison Z, Miller M, and Roper JA, “Words matter: Instructions dictate ‘self-selected’ walking speed in young adults,” Gait & Posture, to be published. [DOI] [PubMed] [Google Scholar]
- [41].Hirasaki E, Moore ST, Raphan T, and Cohen B, “Effects of walking velocity on vertical head and body movements during locomotion,” Exp. Brain Res, vol. 127, no. 2, pp. 117–130, July. 1999. [DOI] [PubMed] [Google Scholar]
- [42].Collins SH and Kuo AD, “Two independent contributions to step variability during over-ground human walking,” PLoS ONE, vol. 8, no. 8, August. 2013, Art. no. e73597. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [43].Brach JS, Berlin JE, VanSwearingen JM, Newman AB, and Studenski SA, “Too much or too little step width variability is associated with a fall history in older persons who walk at or near normal gait speed,” J. Neuroeng. Rehabil, vol. 2, no. 1, p. 21, July. 2005. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [44].O’Connor SM and Kuo AD, “Direction-dependent control of balance during walking and standing,” J. Neurophysiol, vol. 102, no. 3, pp. 1411–1419, September. 2009. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [45].Jackson RW, Dembia CL, Delp SL, and Collins SH, “Muscle–tendon mechanics explain unexpected effects of exoskeleton assistance on metabolic rate during walking,” J. Exp. Biol, vol. 220, no. 11, pp. 2082–2095, 2017. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [46].Song S and Geyer H, “A neural circuitry that emphasizes spinal feedback generates diverse behaviours of human locomotion,” J. Physiol, vol. 593, no. 16, pp. 3493–3511, August. 2015. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [47].Falisse A, Serrancolí G, Dembia CL, Gillis J, Jonkers I, and De Groote F, “Rapid predictive simulations with complex musculoskeletal models suggest that diverse healthy and pathological human gaits can emerge from similar control strategies,” J. Roy. Soc. Interface, vol. 16, no. 157, August. 2019, Art. no. 20190402. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [48].Hogan MC, Ingham E, and Kurdak SS, “Contraction duration affects metabolic energy cost and fatigue in skeletal muscle,” Amer. J. Physiol.-Endocrinol. Metabolism, vol. 274, no. 3, pp. E397–E402, March. 1998. [DOI] [PubMed] [Google Scholar]
- [49].Ralston HJ, “Energy-speed relation and optimal speed during level walking,” Internationale Zeitschrift für Angew. Physiologie Einschliesslich Arbeitsphysiologie, vol. 17, no. 4, pp. 277–283, October. 1958. [DOI] [PubMed] [Google Scholar]
- [50].Donelan JM, Shipman DW, Kram R, and Kuo AD, “Mechanical and metabolic requirements for active lateral stabilization in human walking,” J. Biomech, vol. 37, no. 6, pp. 827–835, June. 2004. [DOI] [PubMed] [Google Scholar]
- [51].O’Connor SM, Xu HZ, and Kuo AD, “Energetic cost of walking with increased step variability,” Gait Posture, vol. 36, no. 1, pp. 102–107, May 2012. [DOI] [PMC free article] [PubMed] [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.