

Abstract
In a series of experiments, we tested the hypothesis that severely degraded viewing conditions during locomotion distort the perception of distance traveled. Some research suggests that there is little-to-no systematic error in perceiving closer distances from a static viewpoint with severely degraded acuity and contrast sensitivity (which we will refer to as blur). However, several related areas of research—extending across domains of perception, attention, and spatial learning—suggest that degraded acuity and contrast sensitivity would affect estimates of distance traveled during locomotion. In a first experiment, we measured estimations of distance traveled in a real-world locomotion task and found that distances were overestimated with blur compared to normal vision using two measures: verbal reports and visual matching (Experiments 1 a, b, and c). In Experiment 2, participants indicated their estimate of the length of a previously traveled path by actively walking an equivalent distance in a viewing condition that either matched their initial path (e.g., blur/blur) or did not match (e.g., blur/normal). Overestimation in blur was found only when participants learned the path in blur and made estimates in normal vision (not in matched blur learning/judgment trials), further suggesting a reliance on dynamic visual information in estimates of distance traveled. In Experiment 3, we found evidence that perception of speed is similarly affected by the blur vision condition, showing an overestimation in perception of speed experienced in wheelchair locomotion during blur compared to normal vision. Taken together, our results demonstrate that severely degraded acuity and contrast sensitivity may increase people’s tendency to overestimate perception of distance traveled, perhaps because of an increased perception of speed of self-motion.
Keywords: distance perception, low vision perception, locomotion
Introduction
Understanding how individuals with visual impairments successfully navigate in novel large-scale spaces requires examination of a combination of factors including how individuals perceive, move through, and learn locations in the environment. Spatial learning of novel environments often is aided by information about the distance traveled as the learner moves through the space. Vision can play an important role in acquiring this information (Bremmer & Lappe, 1999; Redlick, Jenkin, & Harris, 2001). Estimates of distance traveled during navigation are also influenced by increased attentional demands (Glasauer, Schneider, Grasso, & Ivanenko, 2007; Sargent, Zacks, Philbeck, & Flores, 2013), and increased attentional demands are one consequence of the additional monitoring for safe mobility that occurs with navigation under degraded viewing conditions (Rand, Creem-Regehr, & Thompson, 2015). Based on these related findings, we set out to test the prediction that estimates of distance traveled would be affected by simulated low vision, specifically severely degraded acuity and contrast sensitivity (referred to throughout the paper as blur).
Distance Perception from Self-Motion
Important to understanding and acting on spatial layouts within an environment is accurate perception of distance within the space. For example, such information aids our ability to return to a starting location, determine whether the energy costs are worth the travel goal, or form a cognitive map of a novel environment. While some distance information is derived from static visual cues or from using a representation of the space such as a map or model, important distance information is also obtained dynamically while locomoting through the environment. Sources of information for distance traveled through self motion can come from multiple key sources, often broken down into the two major categories of body-based (vestibular and proprioceptive) information and dynamic visual information (optic flow). It is well-established that animals have the ability to use self-motion cues for keeping track of their location in space in a process called path integration, and the use of optic flow for determining distance traveled is one part of this process (Harris et al., 2012; Mittelstaedt & Mittelstaedt, 2001).
Optic flow is the dynamic retinal information obtained while an individual is in motion (Gibson, 1950). Optic flow on its own is insufficient to determine either speed of travel or distance traveled. However, under appropriate assumptions about the trajectory of motion (e.g., movement involving constant eye height over a ground plane), visual information about speed and distance can be derived from flow patterns, particularly when comparisons are being made. People are good at discriminating between distances traveled when presented with optic flow patterns without corresponding body-movement in a virtual environment (Bremmer & Lappe, 1999). However, the integration of visual and non-visual cues arising from natural vestibular movement tasks and optic flow patterns yields more accurate and less variable distance estimations, suggesting that information from a combination of sources results in the best understanding of distance traveled (Campos, Butler, & Bülthoff, 2012; Campos, Byrne, & Sun, 2010; Sun, Campos, & Chan, 2004; Sun, Campos, Young, Chan, & Ellard, 2004).
Research on estimates of distance traveled under normal viewing conditions both in the real world and in virtual environments (VEs) has consistently found underestimation in perceived distance when using the task of matching or reproducing an interval traveled. This task involves dynamically viewing a flow pattern (in a VE) or walking in the real world for an interval unknown by the participant, and estimating that interval by matching the traveled distance with a static target (Frenz & Lappe, 2005; Frenz, Lappe, Kolesnik, & Bülhrmann, 2007), or by reproducing the interval by walking (Sun, Campos, Young, et al., 2004)1. Furthermore, the magnitude of underestimation increases with distance. Lappe and colleagues proposed a model that accounted for these underestimation effects, showing that distance estimates are based on both a “gain” parameter which depends on the sensory information that is available to estimate movement and a “leak” rate parameter which describes the amount of decay in the integrated distance (Lappe, Jenkin, & Harris, 2007). Consistent with this notion, Magel and Sadalla (1980) demonstrated that when longer paths (up to 60 meters) contained more turns, distance estimations showed reduced underestimation, suggesting that there is reduced opportunity for leaky integration when the path can be broken down into shorter segments.
Interestingly, this “leaky integration” model seems to shift and vary when individuals do not have access to all available cues in the environment (i.e. visual, proprioceptive). The gain factor may be different for different sensory information, which could account for differences seen in the accuracy of walking to previously seen targets with eyes closed or the differential weighting observed across different sensory cues. For example, Sun, Campos, Young, et al. (2004) examined visual and non-visual cue contribution by varying cue availability during both initial encoding of distances and subsequent distance estimation. Overall, they showed that idiothetic information alone (walking without vision) led to relatively accurate performance in distance estimation. However, consistent with Lappe et al. (2007), when initial intervals were encoded with eyes-open walking, participants later underestimated the distance traveled through visual matching of an interval. This suggests that additional visual sensory information modulates the body-based information used to determine distance.
These findings leave open the question of how much influence severely degraded acuity and contrast sensitivity have on dynamic estimates of distance traveled. It could be that because visual information becomes less reliable, it is weighted even less than body-based cues in these circumstances, leading to little effect on distance estimations. Alternatively, if degraded visual information is used while walking, then we would expect to find an increase in variability or a systematic bias in estimations of distance traveled, consistent with previous low vision spatial perception and memory studies described below.
Low Vision Distance Perception and Spatial Learning
A limited number of studies have explored distance perception with visual impairments, as most work with clinical populations has been focused on basic mobility tasks such as path following and obstacle avoidance (Kuyk & Elliott, 1999; Pelli, 1987; Turano et al., 2004). Much of the work that has been conducted has examined shorter distances viewable from a static viewpoint (Rand, Tarampi, Creem-Regehr, & Thompson, 2011; Tarampi, Creem-Regehr, & Thompson, 2010). For example, Tarampi et al. (2010) directly compared distance judgments to targets in the environment (at distances up to 6 meters) made from a static viewpoint with normal or simulated severely degraded acuity and contrast sensitivity. Although there was greater within-subject variability in distance judgments with degraded compared to normal vision, overall accuracy with static viewing remained relatively intact, with results showing no systematic differences in distance judgments as a function of distance. Similarly, Kalia, Schrater, and Legge (2013) compared estimates of distances up to 9 meters to a static LED target viewed with blur or normal vision, with the additional information of body-based information obtained from then walking to the targets without vision. Although the design was intended to test the relative weighting of sensory information for distance, the single-cue blur task performance (supplementary experiment 1A) showed relatively accurate, but more variable estimates of distance after static viewing, consistent with Tarampi et al. (2010). Other studies have identified the importance of a visible horizon and visible ground contact in allowing for accurate static distance perception in severe blur (Rand et al., 2011; Rand, Tarampi, Creem-Regehr, & Thompson, 2012). Together, this research suggests that at short distances, distance estimates judged from a static location are relatively intact when fundamental information for the ground plane is available, despite severely degraded viewing conditions.
Extending beyond judgments of distances from a static viewpoint, Legge, Gage, Baek, and Bochsler (2016) evaluated spatial updating of distances traveled (short paths of about 1 to 3 meters) when participants walked or were pushed in a wheelchair under varying conditions of reduced acuity and contrast sensitivity. While this task was dynamic, it involved relatively shorter distances than those in the previously described static viewing experiments. No systematic error effect of viewing condition was found for verbal report distance estimates, regardless of the severity of the visual degradation. These findings are consistent with what was observed when viewers estimated distances from a stationary position, further supporting the idea that distance perception is relatively intact under static or wheeled short distances, leaving open the question of whether distance estimates are disrupted when walking or judging farther distances with blurred vision.
Despite the lack of clear deficits seen in low vision distance perception at short distances, research suggests that visual impairments disrupt the ability to encode large-scale spatial environments (Rand et al, 2015). When asked to learn the location of landmarks while walking through a building with either blurred or normal vision, blurred vision resulted in greater memory error than normal vision. Rand et al. (2015) attributed this deficit in performance to both reduced visual information and the increased attentional demands required to monitor one’s own safe walking (referred to as mobility monitoring) in a novel environment in conditions of severe blur. When these attentional demands were reduced by allowing for a physical guide along the paths, the error decreased. Similar results were recently replicated in a sample of older adults with simulated blur (Barhorst-Cates, Rand, & Creem-Regehr, 2017).
A body of work outside of low vision also supports the claim that attention influences path integration and perception of distance traveled in navigation tasks (Glasauer et al., 2007; Glasauer et al., 2009; Sargent et al., 2013). Glasauer et al. (2007) established that perception of self-motion is affected by performing a concurrent dual task, such that with higher cognitive load, participants underestimated their distance traveled across three types of movements—seated rotation, treadmill walking, and blindfolded walking. In a spatial learning task, Sargent et al. (2013) claimed that “distraction shrinks space”, showing that participants underestimated distances traveled when they were faced with greater cognitive load as a function of added concurrent tasks and environmental distractors present along a path. Thus, these studies generally suggest that navigating with degraded vision would result in a reduction of distance-traveled estimates due to increased distraction, consistent with Rand et al.’s (2015) findings of increased cognitive demands with blur.
Experiment 1
Experiment 1 assessed whether simulated low vision (reduced acuity and contrast sensitivity) influences estimates of distances walked through a real-world, indoor environment. Participants were led along paths of varying length throughout the hallways of a campus building wearing either a pair of goggles that simulated severely degraded contrast sensitivity and acuity (blur) or a pair of control goggles allowing for normal vision. Following each path, participants judged the distance of the path traveled using visual matching (Experiment 1a), or verbal report (Experiment 1b and 1c) responses.
Based on previous work measuring the visual influence on perceived distanced traveled, we expected to see overall underestimation with normal vision, possibly increasing in magnitude with distance. One prediction for the additional effects of low vision, derived from Sargent et al.’s (2013) finding that cognitive load leads to underestimation of distance traveled, is that additional underestimation would be seen in blur compared to normal vision. This would be consistent with the increased cognitive demands previously identified in Rand et al.’s (2015) spatial learning study with low vision. A second possibility followed from the findings of Tarampi et al. (2010) and Legge et al. (2016) who showed no systematic bias in perceived distance to the target with degraded vision but higher within-subject variability, indicating a decrease in precision. If there is a similarity between these previous findings at shorter distances and our current dynamic estimates at longer distances, we would expect to see decreased precision (more within-subject variability) in estimates of distance traveled in blur compared to normal vision. Taken together, prior literature suggests that we may find either 1) more underestimation in blur compared to normal vision or 2) equivalent mean estimation across vision conditions but greater variability in blur.
Experiment 1 used three related procedures in Experiments 1a, 1b, and 1c. We varied the estimation method (i.e., visual matching or verbal estimates) and path complexity (paths with and without turns). In all versions, participants encoded half of the paths with normal vision and half of the paths with simulated blur in a blocked design, and were requested to estimate the distance walked after each path. In Experiment 1a, participants estimated by using a visual matching task in normal vision. We used normal vision for the estimation task because with the severity of our goggles, participants could not identify the location of an experimenter beyond approximately 10 meters, and the path distances ranged from 10-30 meters. To ensure that our findings from Experiment1a were not a result of a mismatch between encoding and estimating following paths walked in blur, in Experiment 1b participants estimated the distance walked using verbal reports. In Experiment 1c, participants also used verbal report responses, but the encoded paths contained turns and narrower hallways than those in 1a and 1b. These more complex paths were included in an attempt to increase potential cognitive load resulting from vision-related mobility monitoring demands, identified in Rand et al. (2015).
Method
Participants.
Fifty-six University of Utah students (32 females) participated in Experiment 1: 18 in 1a (13 females), 18 in 1b (12 females), and 20 in 1c (7 females). No participant completed more than one version of the experiment. All participants had normal or corrected-to-normal vision and were granted partial course credit for their participation. The mean age and ranges of the participants were as follows: Experiment 1a= 18-43 years (M = 26.0); Experiment 1b = 18-26 (M = 19.7); Experiment 1c = 18-25 (M =19.5).
Materials.
Participants in Experiments 1a-c wore two sets of goggles during the experiment: one pair of blur goggles and one control pair. Both pairs were welding goggles with the original glass lens removed. In the blur goggles, substitute lenses made of theatrical lighting filter material (Cinegel #3047: Light velvet frost; Rosco Laboratories, Stamford, CT) were installed for both eyes, resulting in an average binocular acuity of logMAR 1.44, or 20/562 Snellen, and an average log contrast sensitivity of 0.76. For the control pair, no lens covered the eyes. This resulted in the participants’ normal vision with a field of view (FOV) consistent with the blur pair: average 71° in the horizontal and 68° in the vertical, tested binocularly. The degradation of visual acuity, contrast sensitivity, and FOV were evaluated using a separate group of 20 participants. A simulated image of the viewing conditions in the blur goggles, correctly calibrated for loss of acuity and contrast sensitivity using the method described in Thompson, Legge, Kersten, Shakepeare, and Lei (2017), is shown in Figure 1.
Figure 1.

Left: View of a hallway similar to those used in the experiment. Right: Simulated appearance of the same hallway while wearing the blur goggles.
Throughout all three versions of Experiment 1, participants walked a series of 12 paths throughout the hallways of the Merrill Engineering Building on the campus of the University of Utah. This building was located on the opposite side of campus from the main psychology building, and most students were unfamiliar with the building. Six paths were located on the second level of the building, and the remaining six on the third level. On each floor, there were two experimental paths at each of three distances: 10, 20, and 30 meters. For Experiment 1a and 1b, all paths took place in straight, wide hallways with no turns. The paths for Experiment 1c were matched for distance, but contained one turn per path and incorporated segments of hallways that were narrower than those used in 1a and 1b on some paths to increase path complexity. In 1a and 1b, we controlled whether the participant would have enough room to complete the visual matching task in the same hallway, or would need to turn a corner following completion of the encoded path in order to complete the distance judgment. One path at each of the three path distances ended in a location that left enough room for the visual matching to be completed in the same hallway, and one path required the participant to turn the corner before making the judgment. An exemplar map is displayed in Figure 2.
Figure 2.
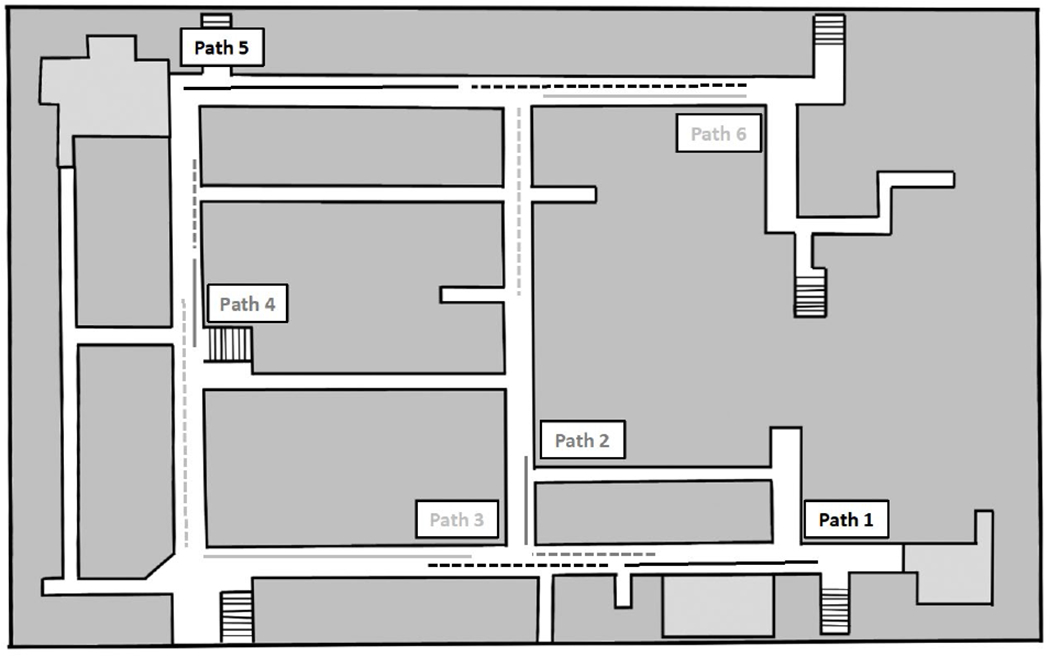
Exemplar map of a single floor with 6 experimental paths. Solid lines indicate the learned path, and dashed lines represent the segment of hallway used to make the visual matching distance judgments in Experiment 1a.
Procedure.
Informed consent was obtained from all individual participants included in the study. Participants also filled out a brief demographic questionnaire prior to beginning the study. Next, the lead experimenter provided a description of the study and detailed instructions. Prior to the start of the experimental trials, participants practiced walking through the hallways with the blur goggles until they reached a point where they could comfortably travel at their normal walking pace. The blur goggle practice took approximately 2-3 minutes. Participants also completed two practice trials: one in each vision condition.
For Experiments 1b and 1c, participants underwent a distance calibration training procedure after instructions, but prior to the start of the practice trials to prepare them for the verbal response task. This procedure was included in an attempt to reduce the variability often associated with verbal report responses, particularly given the relatively long path distances in the experiment. This calibration training also allowed us the opportunity to ensure that participants were comfortable with, and capable of using feet in their distance estimations, the preferred metric of the United States (all participants were able to do so). Participants were given a laser distance meter (with the output setting in feet). They were first instructed to measure the full distance of a long hallway in the building to calibrate. Next, the lead experimenter stood at five locations at varying distances from the participant, who remained in the same location. At each location, participants first verbally estimated the distance between their location and the experimenter’s, and then measured with the distance meter to compare their estimates to the veridical distance.
Participants completed the first half (6) of the paths on the third floor in either the blur goggles (low vision condition) or the control goggles (normal vision condition) and then the second half of the paths in the other vision condition. The vision order was manipulated between subjects and counterbalanced. All participants completed the 12 trials in the same order, including a brief break from the goggles after the sixth trial where participants walked downstairs and were offered a water break and a few minutes to rest prior to starting the remaining six trials in the opposite vision condition. On each trial for all experiments, participants were guided to the starting location by a lead experimenter while wearing the goggles. Care was taken to ensure participants were not given unrestricted view of the to-be-traveled path prior to the start of the trial by requiring participants to keep the goggles on even when walking in between trials once each experimental block began. Next, the lead experimenter read a random six-digit sequence to the participant, and asked him or her to repeat the sequence aloud to ensure he or she heard it correctly. Participants were instructed to begin walking at a normal pace after repeating the sequence, and to continue walking at that pace until they were told by the experimenter to stop. When the participants were stopped at the end of each path, they were instructed to repeat the sequence aloud again, and then provide their distance estimate (which differed by experiment). The digit task was included to discourage participants from using a step-counting strategy. Upon completing all twelve experimental trials, participants were led back to the classroom, asked several questions about their experience, and debriefed.
For Experiment 1a, participants estimated the distance traveled through a visual-matching task. On half of the trials, participants made their distance judgment from the end location of the experimental path. For the other half of the trials, there was not enough room in the same hallway to complete the matching task. On these trials, participants took several steps to the end of the hall, turned 90 degrees to the right or left, depending on the trial, and made their estimations from that location. On these turn-and-judge trials, participants were instructed to ignore the few steps taken while turning the corner, and to only report the distance they traveled from the specified encoded path segment. To make the distance judgments, participants used unrestricted vision to view a second experimenter in the hallway. To control for anchoring effects, the starting point for the second experimenter was precisely measured to be 50 percent of the trial distance for half of the trials, and 150 percent of the trial distance for the remaining half of the trials. For example, for a 20-meter trial, starting distances were either 10 or 30 meters, resulting in proportional but larger anchoring effects at longer distances. The participants instructed the second experimenter to move closer towards them or farther away from them until the distance between the participant and the second experimenter matched the distance the participant remembered walking on the path. When the participant indicated the second experimenter was in the correct position, the lead experimenter measured and recorded the distance, instructed the participant to lower the goggles back down, and led the participant to the next path.
For Experiments 1b and 1c, participants estimated the distance they walked on each trial immediately following the digit sequence recall at the end of each path. Participants estimated how far they walked, in feet, through verbal report. The lead experimenter recorded the estimate and guided the participant to the start of the next path. Participants were instructed to keep the goggles on during the complete block of trials completed on each level, even when making distance estimates and walking in between experimental paths.
Results
The primary dependent variable in Experiment 1 was the estimate of the distance provided by the participant relative to the actual distance of each path. Accordingly, we first converted all distance estimates into a ratio value (estimated distance/actual distance) such that values less than 1 represent underestimation and values greater than 1 represent overestimation.
For Experiment 1a, participants estimated distances traveled either in blur or control goggles through visual-matching responses. We conducted a 2 (vision condition: blur vs. normal) x 3 (distance: 10, 20, or 30m) x 2 (experimenter start position: near vs. far) x 2 (vision order) repeated-measures ANOVA on the ratio values, with vision order as a between-subjects factor and vision condition, distance, and experimenter start position as within-subjects factors. Addressing the primary question of whether blur and normal vision conditions would differ, the analysis revealed a significant main effect of vision condition, F(1, 16) = 11.11, p <. 05, ηp2 = .410. Participants significantly overestimated in the blur condition (M = 1.09, SD =.174) compared to the normal vision condition (M = .988, SD = .141). There was also a significant vision condition x vision order interaction, F(1,16) = 9.92, p < .05, ηp2 = .383. Follow-up t-tests showed that the observed overestimation in distance estimates with blur paths compared to normal vision paths occurred when the normal vision block was first (blur M = 1.12, SD = .177; normal M = .928, SD = .132, p < .01) but there was no difference when the blur vision block was first (blur M = 1.053, SD = .177; normal M = 1.047, SD =.131, p = .92). The analysis also revealed a main effect of experimenter start position, F(1,16) = 16.81, p < .05, ηp2 = .512, revealing the expected anchoring effects of participants underestimating when the start position was 50% closer than the veridical distance (M = .943, SD = .165) and overestimating when the start position was 50% farther than the veridical distance traveled (M = 1.13, SD = .178). Finally, there was a significant distance x experimenter start position interaction, F(1,15) = 31.342, p < .05, ηp2 = .807, suggesting that the magnitude of the effect of experimenter start position differed based on the path distance. When the experimenter starting position was near vs. far, the mean ratio values for each distance were .956 (SD = .250) vs. 1.15 (SD = .233) for 10 meters, 1.05 (SD = .178) vs. 1.09 (SD = .221) for 20 meters, and .825 (SD = .174) vs. 1.16 (SD = .187) for 30 meters, respectively. Results from Experiment 1a are presented in Figure 3. No other main effects or interactions reached significance.
Figure 3.
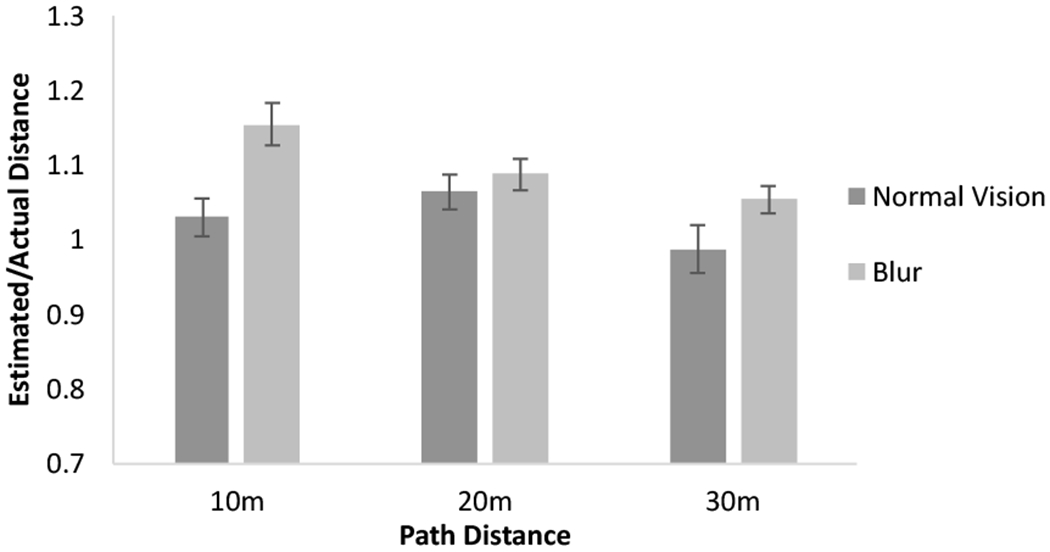
Mean ratio values of visual matching distance estimates divided by actual path distances for Experiment 1a. Error bars represent within-subjects standard error.
For Experiment 1b, participants walked single segment paths and estimated the distance using verbal reports of feet instead of visual matching. Estimate ratios were analyzed with a 2 (vision condition; blur vs. normal) x 3 (distance; 10, 20, or 30m) x 2 (vision order) repeated-measures ANOVA with vision order as a between-subjects factor, and vision condition and distance as within-subjects factors. Consistent with that of Experiment 1a, the analysis revealed a main effect of vision condition F(1,16) = 8.47, p < .05, ηp2 = .346, such that participants overestimated their distance traveled following paths with blur (M = .924, SD = .191) compared to paths with normal vision (M = .831, SD = .136). Also significant was a main effect of vision order F(1,16) = 4.632, p < .05, ηp2 = .225 demonstrating that those who performed the blur vision block first estimated that they had walked greater distances (M = .962, SD = .168) compared to those who performed the normal vision block first (M = .793, SD = .168). No other main effects or interactions were significant. Results for Experiment 1b are displayed in Figure 4.
Figure 4.
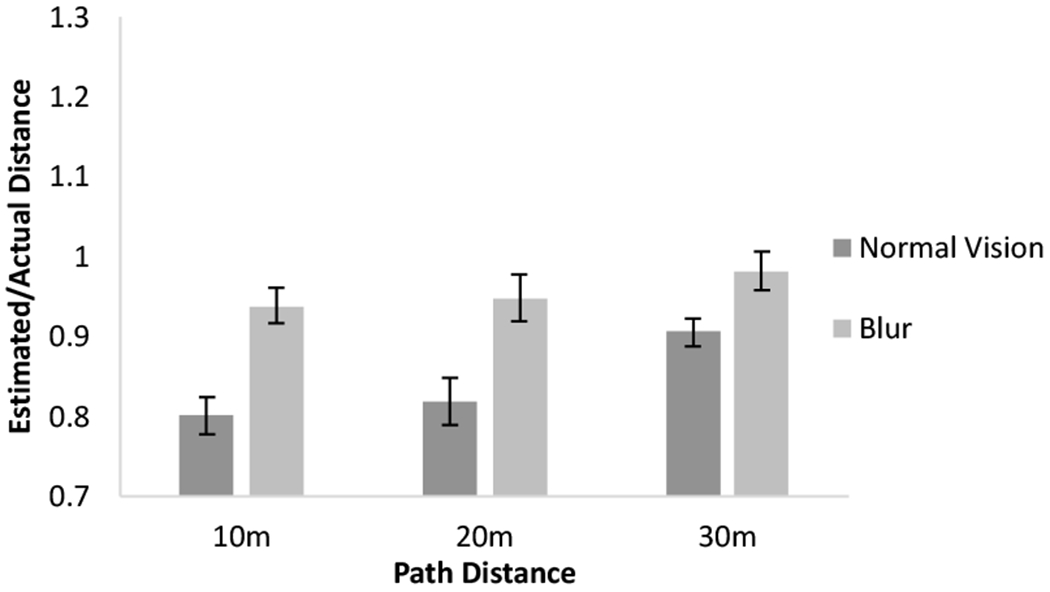
Mean ratio values of verbal distance estimates divided by actual path distances for Experiment 1b. Error bars represent within-subjects standard error.
The same analysis that was used in 1b was repeated with the data from Experiment 1c where participants were asked to estimate the distance of paths with turns using verbal report estimates. There was a significant main effect of vision condition, F(1,16) = 7.47, p<.05, ηp2 = .293 on the estimate ratios. Once again, participants overestimated after traveling distances in blur (M = .956, SD = .297) relative to paths traveled with normal vision (M = .842, SD = .221). All other effects were non-significant. Results for Experiment 1c are displayed in Figure 5.
Figure 5.
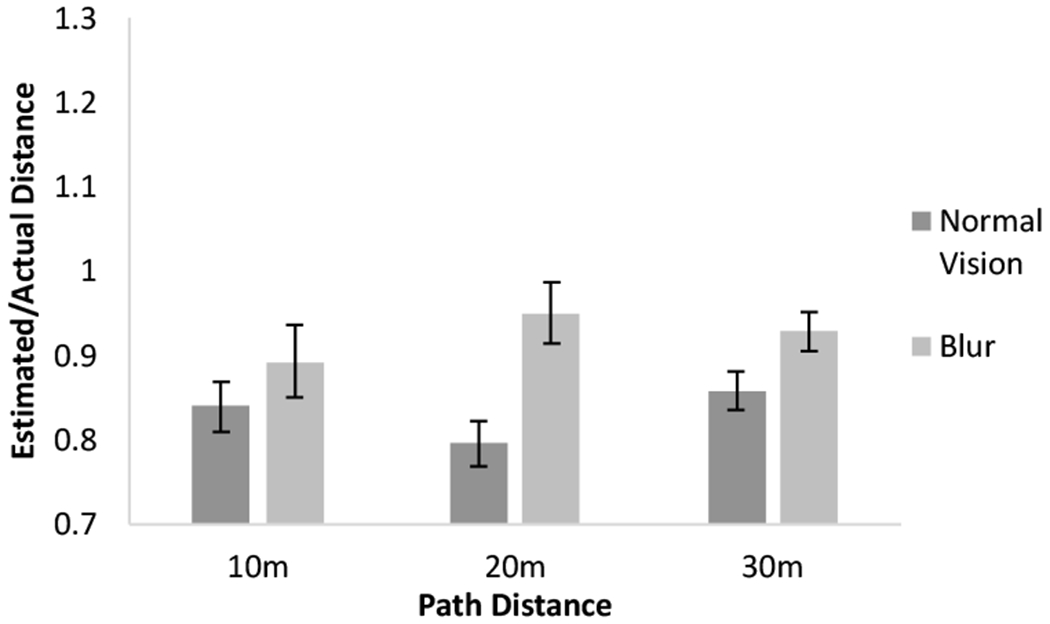
Mean ratio values of verbal distance estimates divided by actual path distances for Experiment 1c. Error bars represent within-subjects standard error.
To assess the variability of distance judgments, two values were first calculated for each participant: the standard deviation (SD) of the mean distance estimates made when viewing with blur goggles, and a standard deviation of the mean estimates made when viewing with normal vision. The values were calculated using the 6 total distance estimate ratio values (2 at each of the 3 distances), and were therefore collapsed across distance. We then conducted a paired-sample t-test with the SD for normal vision and the SD for blur entered into the analysis for each experiment. For Experiments 1a and 1b, the SDs for blur and normal vision conditions did not differ (Experiment 1a: blur SD =.25, normal vision SD = .21, t(17) = 1.148, p = .099; Experiment 1b: blur SD = .20, normal vision SD = .19, t(17) = .430, p =.672). In Experiment 1c, the variability was greater in blur (SD = .31) compared to normal (SD = .21), t(19) = 2.161, p < .05, suggesting that within-subjects variability was greater in blur vision compared to normal vision for paths of greater complexity.
Discussion
In all three versions of Experiment 1, results revealed a consistent bias such that distances walked with simulated low vision were overestimated relative to the same distance walked in normal vision. While we did expect that walking with simulated low vision would affect estimates of distance, prior work relating to increased cognitive demands suggested a change in the opposite direction—namely, underestimation compared to the normal viewing condition. For Experiment 1a, participants used a visual-matching task to report distance estimates. While estimates on average were very accurate for paths walked with normal vision, paths walked in blurred vision showed an approximate 10% overestimation. Although visual matching is typically a more reliable measure than verbal reports, in Experiment 1b a verbal report measure was used to ensure that the finding from 1a was not due to the necessary mismatch in visual conditions at encoding (blur) versus recall (normal vision) in the case of low vision trials. Despite the change in response measure and overall underestimated reports, the pattern of results from 1a was replicated in 1b. The visual matching measure also showed an order interaction with vision condition, which could have been specific to a strategy used in matching2. Lastly, Experiment 1c was conducted to determine whether an increase in path complexity would change the pattern of results revealed in 1a and 1b, where participants walked straight paths in wide hallways, conditions that are likely less cognitively taxing. In Experiment 1c, participants estimated the distance of paths with narrower hallway widths and turns. Despite the increased complexity, overestimation of path distance in blurred vision compared to normal vision was once again observed.
Together, these experiments suggest that reduced acuity and contrast sensitivity does influence perception of distance traveled, based on two types of stationary estimates performed after the locomotion task. Although the distance-traveled task inherently involves dynamic visual information, the difference between the normal and blurred vision estimations could also be explained by visual information beyond optic flow. For example, in normal vision, the participant has much greater visibility of the extent of the hallway and would therefore be able to make a comparison between the starting and ending location to derive distance walked without the need for dynamic visual information. In blurred vision, the visual information providing a context for the length of the hallway is degraded and likely not a viable strategy, perhaps increasing reliance on dynamic visual and body-based information (see Figure 1). The visible extent of the hallway in normal vision, used during distance estimations with the visual matching measure, could also provide a context to calibrate the observer that is different than what is experienced in blurred conditions. To address the possibility of adopting different strategies in normal compared to blurred conditions due to differential access to static visual information, Experiment 2 more specifically addressed the use of dynamic visual information using a different dynamic estimation paradigm.
Experiment 2
One possible explanation for the overestimation in blur compared to normal vision is that reduced acuity and contrast sensitivity alters the perception of self-motion derived from optic flow. To more directly test the role of visually perceived motion in dynamic estimates of distance traveled, in Experiment 2 participants walked the same paths as in the first experiment, but estimated by replicating the remembered distance by walking an equivalent distance in a different section of hallway. That is, participants initially walked a path of either 10, 20, or 30 meters, and then to indicate their perceived distance traveled, they were instructed to walk along a different path until they felt that the distance walked matched the distance of the previously-traveled path. This ensured that there was optic flow both when walking the initial learning path and when making the distance judgment.
In this experiment, participants walked all encoding paths in blur, but replicated path distances with the same blur condition for one block of trials (equivalent experience of visual motion in learning and estimation), and in normal vision (different experience of visual motion in learning and estimation) for the other block of trials. We expected that if dynamic visual information was contributing to overestimation during Experiment 1, that when replicating while walking with the same blur vision condition the overestimation effect would no longer be observed, as the perceptual experience of the optic flow pattern would be similarly influenced during estimation. In contrast, we expected to find overestimation in blur when participants replicated the paths with normal vision after encoding the path in blur, consistent with the results found in Experiment 1. This result would provide further support that the dynamic visual information experienced during walking was a factor driving the difference in distance estimation.
Method
Participants.
Eighteen University of Utah students (15 females) participated in Experiment 2 ranging in age from 19-27 years (M = 20.91). No participant from Experiment 2 had participated in Experiment 1. All participants had normal or corrected-to-normal vision and were granted partial course credit for their participation.
Procedure.
Informed consent was obtained from all individual participants included in the study. The same paths and vision goggles used in Experiment 1a were again used in Experiment 2. The general procedure was almost identical to Experiment 1a except that instead of estimating the distance traveled using a visual-matching report, participants in Experiment 2 were asked to estimate the distance traveled by walking the distance they believed to be equivalent to the path distance. Participants were once again given a six-digit sequence to remember, and walked the path directed by the experimenter. After completion of the encoding path and repeating of the digit sequence, participants were instructed to replicate the distance they had just walked on the previous path. If sufficient space (at least double the path length) was available in the remainder of the hallway where the instructed path was completed, participants began replication from that location. If the length of the hallway was insufficient, participants were led a short distance (no longer than 5 meters) to an adjacent hallway, turned 90 degrees, and instructed to begin replication at that location, ignoring the short distance walked around the corner. Participants then began walking and were instructed to stop when they felt as though the distance matched that of the encoding path. The replication distance traveled was then recorded using a laser distance meter, and participants proceeded on to the next path.
All participants in Experiment 2 completed a total of 12 learning paths throughout 2 blocks in the experiment. Participants wore the blur goggles for the learning paths for both blocks, but wore the control pair for replication in one block, and the blur pair for the other block in a counterbalanced order. At the conclusion of the study, participants were debriefed.
Results
Distance judgments were first converted into ratio values (estimate distance/actual distance). We then conducted a 2 (vision condition during estimation: blur vs. normal) x 2 (vision order) x 3 (distance: 10, 20, or 30m) repeated-measures ANOVA with vision order as a between-subjects factor and vision condition and distance as within-subject factors. The analysis revealed a main effect of vision condition, F(1,16) = 6.624, p < .05, ηp2 = .293. This finding was in the predicted direction such that when participants replicated distances in normal vision, overestimation was observed (M = 1.025, SD =.191) relative to replicating distances in blur (M = .944, SD =.119). The analysis also revealed a main effect of distance, F(1,15) = 11.14, p < .05, ηp2 = .598, again revealing that distance ratio estimates decreased as distance increased (10 meters M = 1.099, SD = .191; 20 meters M = .954, SD = .170; 30 meters M = .90, SD = .153). There were no other significant main effects or interactions. Results are displayed in Figure 6.
Figure 6.
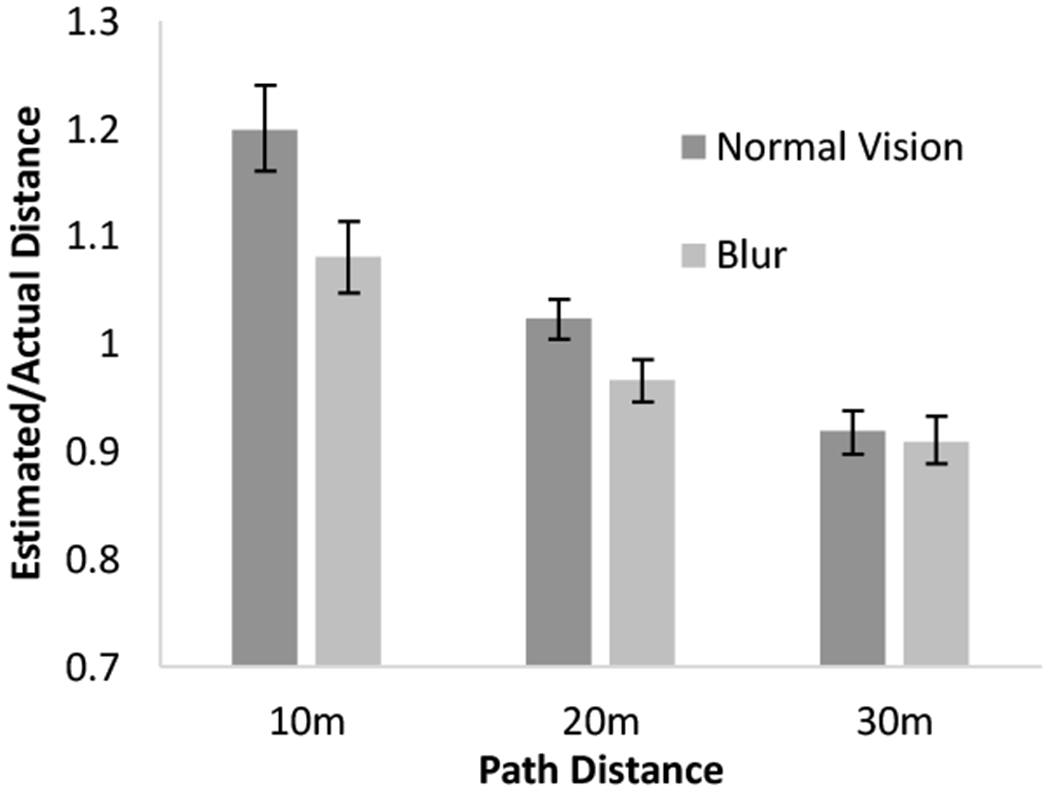
Mean ratio values of walked distance estimates divided by actual path distances for Experiment 2. Error bars represent standard error.
We also performed a paired-sample t-test on the SD of the mean of the six distance estimate ratios for each block, to determine whether there was increased within-subjects variability in blur compared to normal vision. Estimates made in the blur condition (SD = .20) did not show significantly higher variability than estimates made in normal vision (SD = .23), t(17) = .643, p = .529.
Discussion
As in Experiment 1, our second experiment demonstrated that perceived distance traveled is overestimated in blur compared to normal vision. We used a different methodology which more directly provides support for an effect due to the dynamic visual information perceived during walking. If participants’ overestimations of distance traveled are based on the perceptual experience of the optic flow pattern that they receive during walking, then when asked to replicate the distance by walking with the same visual information (e.g., blur during both phases) we would expect no overestimation because the optic flow experienced was matched in encoding and estimation. However, we expected to see participants walk farther when estimating with normal vision in order to match the perceived farther distance encoded with blur. This was the result—participants showed greater estimations of their travel distance under blur encoding when they were asked to estimate with normal vision compared to blur. These results provide some support that the optic flow experienced in the blur condition affects participants’ perception of distance traveled. We ran a final experiment to assess whether a more direct measure of perception of self-motion—self-assessments of perceived speed—would lead to results consistent with this hypothesis.
Experiment 3
While Experiment 2 provided support for the hypothesis that the dynamic visual information perceived during walking with blur is an important contributor to the overestimation of distance, in Experiment 3 we tested this idea further by measuring the perception of speed when traveling with blur compared to normal vision. Given the overestimation of distance traveled found in previous experiments, we expected that participants would judge the environment to be passing by at a faster rate with blurred vision when compared to normal vision (i.e., faster perceived self-motion in blur). The relationship between perception of distance traveled and estimates of speed of self-motion has been established with a number of different paradigms that have manipulated optic flow (Frenz, Bremmer, & Lappe, 2003; Larish & Flach, 1990; Mohler, Thompson, Creem-Regehr, Pick Jr., & Warren, 2007). In the current study, an increase in participants’ estimates of speed of travel in blur would provide converging evidence that the perceptual distortion of distance overestimation is a result of the changed perception of self-motion experienced during initial travel with blur. In other words, Experiment 3 tested the hypothesis that participants would report faster movement in blur compared to normal vision, consistent with their overestimations in distance traveled.
Method
Participants.
Twelve University of Utah students (8 females) participated in Experiment 3, ranging in age from 19-31 years (M=21.83). No participant from Experiment 3 had previously participated in Experiments 1 or 2. All participants had normal or corrected-to-normal vision and were granted partial course credit for their participation.
Procedure.
Informed consent was obtained from all individual participants included in the study. After signing the consent form, participants were given a general instructional overview, informing them that they would be asked to keep track of the speed at which they were pushed in a wheelchair, and attempt to replicate that speed while walking when the path was complete. Prior to beginning practice trials, participants walked for approximately 1-2 minutes in both the control and blur goggles, and were asked to simply walk at a comfortable pace, and take notice of where they fixed their gaze and the types of information that they attended to while walking. They were then told to remember where they had been looking, and try to look at similar locations in the hallway when being pushed in the wheelchair. Next, participants were given one practice trial in each vision condition before beginning the experimental conditions.
In the practice trial as well as the experimental trials, participants were first pushed for 15 meters in the wheelchair wearing either the blur or the control goggles (the same pairs used in the previous experiments), and were instructed to pay close attention to the speed of self-movement throughout the path. Next, participants lowered a blindfold and stood up from the wheelchair with the assistance of an experimenter. Participants were then instructed to walk, without vision, matching the speed they remembered being pushed on the previous path. To ensure participants had the confidence to walk at the remembered pace, they held the arm of an experimenter so they walked in a straight line, but still had complete control of the pace walked. After the participant replicated the speed of self-motion for 15 meters, the experimenter instructed the participant to stop. The time to be pushed as well as the time to replicate was carefully recorded by a second experimenter. Participants then sat back down in the wheelchair and were pushed with the blindfold on to the start of the next path. Participants completed 6 experimental trials in each vision condition in a counterbalanced order. Upon completion of all 12 trials, participants were debriefed.
Results
We calculated the pace, in meters/second, for each path by dividing 15 (the length of each path) by the time (in seconds) to complete each path. Therefore, each participant had a pace value for how fast they were pushed and how fast they walked to replicate the pushed speed for each vision condition. Although the experimenter was trained to push the participant at a consistent speed, prior to conducting the main analyses, a paired-sample t-test was conducted on the average wheeled pace in each vision condition. The results confirmed that the wheeled pace averages did not differ between blur (M = .910 m/sec, SD = .064) and normal vision (M = .909 m/sec, SD = .060), p = .886. These values were converted into an estimated/actual ratio value by dividing the estimated pace provided by the blind walking trial by the pace pushed in the wheelchair such that values greater than one indicate a faster estimated pace than the wheeled pace, and values less than one indicate a slower estimated pace than the wheeled pace. The walked/wheeled pace ratios were analyzed with a 2 X 2 ANOVA with vision condition as a within-subjects factor and vision order as a between-subjects factor to test whether estimated speed differed after being wheeled in blur compared to normal vision.
The analysis revealed a significant main effect of vision condition, F(1,10) = 37.42, p <. 05, ηp2 =.789, showing that the average estimates of wheeled pace were overestimated, as indicated by the walked/wheeled ratio values, in blurred vision (M = 1.01, SD = .085) compared to in the normal vision condition (M = .920, SD = .088). No other main effects or interactions were significant. Together, these findings reveal that although participants were pushed at equal speeds in the wheelchair, when walking to match the perceived pushed pace, participants walked faster after being pushed in blur compared to normal vision. These pace results are depicted in Figure 7.
Figure 7.
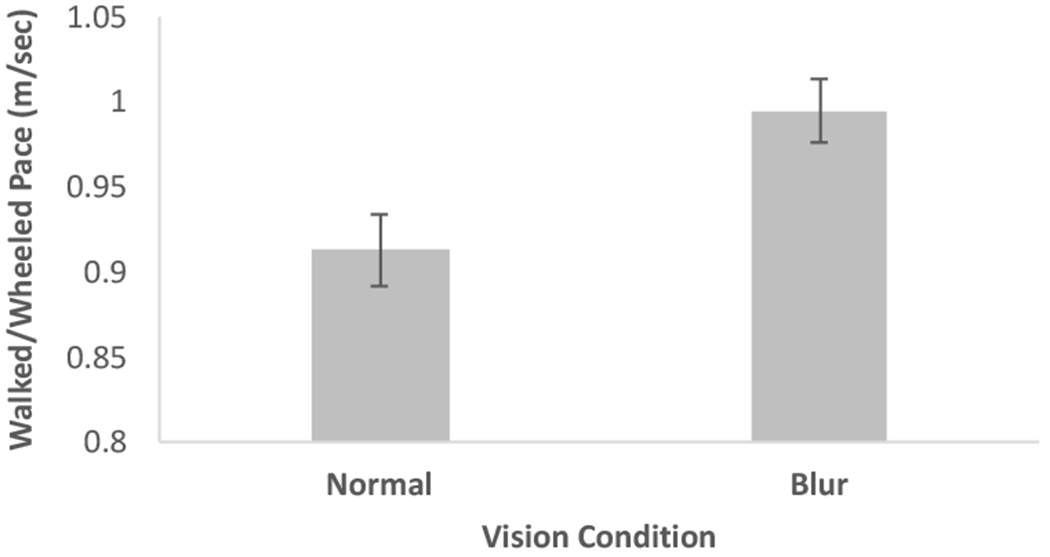
Mean ratio values for estimated pace provided with blind walking divided by the pace of wheeled paths in normal compared to blurred vision for Experiment 3. Error bars represent within-subjects standard error.
Discussion
This experiment tested whether perception of speed while moving through the environment with degraded acuity and contrast sensitivity would show effects consistent with the overestimation of distance traveled established in Experiments 1 and 2—namely, faster perceived speed of self-motion. Using a matching-by-blind-walking task, we showed that estimated speed of movement was faster when travel occurred under blur compared to normal vision conditions. This finding supports the notion that overestimation of distance traveled in blur is the result of an experience of the optic flow pattern that makes the environment appear as though it is moving past more quickly in blur vision locomotion than when locomoting with normal vision. The lowered eye height in a wheelchair compared to standing eye height would predict increased speed perception, although this was held constant across normal and blur vision conditions and is thus not a likely explanation. Interestingly, participants tended to substantially underestimate the pace at which they were pushed during the normal vision condition. Although speculative, it may have been that being pushed in normal vision at an average pace of approximately .9 m/sec felt noticeably slow relative to a normal walking speed (average 1.4m/sec), and participants’ sense of exaggerated slowness was revealed in their speed estimates. For those paths pushed in blur, the perceived speed was faster, therefore countering the underestimation.
General Discussion
In three studies, we provide converging evidence for the finding that viewers overestimate their distance traveled under severely degraded acuity and contrast viewing conditions compared to when locomoting with normal vision. While we predicted that estimates of dynamic distance perception would likely be influenced by low vision, the overestimation seen in this series of studies was surprising given that previous perception and spatial memory studies conducted in normal vision would have suggested underestimation. We provide evidence that the overestimation may be explained, in part, by the perception of speed of movement. Specifically, the results suggest that blurred vision may create the perception of moving faster through the environment, leading to one’s estimation that he or she has traveled farther. While simply establishing this effect is potentially useful for understanding large-scale mobility and navigation more broadly in low vision, an obvious question to ask is why this overestimation occurs. This is largely an open question, but we present some potential explanations here.
A large body of literature supports the notion that optic flow plays a role in self-motion perception, including studies showing its use in estimating heading (Warren & Hannon, 1988), speed of travel (Sun, Lee, Campos, Chan, & Zhang, 2003) and time to collision (Lee, 1976). Veridical determination of speed and of distance traveled, however, cannot be based on optic flow alone. For example, moving through a 3-D environment at a particular speed creates an identical optic flow field to that resulting from moving through a 3-D environment twice the size at twice the speed. There is evidence that under normal vision conditions, humans are able to effectively combine information about optic flow with information about environmental geometry to make reasonable judgments about speed and distance traveled (Frenz et al., 2003; Frenz & Lappe, 2005; Mohler, Thompson, Creem-Regehr, Willemsen, et al., 2007).
There are several ways in which the low-vision simulation used in the work reported here could bias such judgments. First, some studies have shown that variations in contrast of moving sine wave patterns affect the perceived velocity of the grating, but with decreased contrast leading to decreased perceived speed, which would fail to predict our results (Stone & Thompson, 1992). A second possibility is that perceived optic flow was similar in the two visual conditions, but that reductions in acuity and contrast changed the perception of environmental scale (i.e. the hallways appeared longer in blur compared to normal vision). If perceived flow did not change across conditions, but the size of the hallways viewed under simulated low vision was perceived to be larger than the size viewed under normal vision, then we would expect that the perceived speed of self-motion would be greater in the low vision condition. A third possibility related to optic flow is associated with the observation that our low vision simulation reduced the distance down the hallways at which features could be clearly seen (see Figure 1). This occurs because the high-contrast features in the hallways are mostly doors and other human-scale structures. Large reductions in acuity make these features near-invisible at longer distances in the hallways. The magnitude of optic flow when moving is distributed such that nearer surfaces are associated with higher flow magnitude (discounting the effects of rotation). If the only structures generating visible flow are close to the viewer, then the average flow over all visible structures will increase, potentially increasing the perceived speed of travel. This is consistent with the effect found in the truncated ground plane condition of Experiment 3 in Frenz et al. (2003) but inconsistent with results from the fog condition in the same experiment, which is arguably closer to our low vision simulation. However, several studies have been conducted assessing the impact of simulated fog on visual perception of speed in a driving simulator or other computer graphics displays (Frenz et al., 2003; Pretto & Chatziastros, 2006; Snowden, Stimpson, & Ruddle, 1998), yielding equivocal results depending on the details of how the fog was simulated. Overestimation of speed of self-motion in impoverished sensory conditions is also consistent with an ecologically adaptive response that could promote safety of the navigator, as perceiving earlier arrival at an obstacle while traversing would potentially reduce the chance of collisions (Redlick et al. 2001).
Departing from explanations based on the perception of self-motion from optic flow, differences in static visual information in blur compared to normal viewing conditions may have contributed to the overestimation of distance and speed judgments in the blur goggles. As discussed above, the visual information available for the hallway depth and structure differed significantly in the two conditions, and this environmental context information could have influenced strategies used to estimate distance traveled in our experiments. Previous work has shown that environmental context has an effect on static distance judgments using a number of paradigms and measures. For example, Lappin, Shelton, and Rieser (2006) found that judgments on a distance bisection task differed across a hallway, lobby, and field environment. Witt, Stefanucci, Riener, and Proffitt (2007) found that judgments of distance to a target in a hallway were greater when the hallway was bounded by a door compared to when the hallway extended unbounded. In the current study, when viewing in normal vision, observers could compare their static starting and ending positions to derive the distance traveled, because they had many sources of visual information specifying their relative locations in the hallway. However, in the blur condition, the reduced availability of the visual cues for distance may have made it more likely that they would rely on dynamic visual and body-based cues instead of a static comparison. Notably, we did find order effects in Experiment 1, where the overestimation in blur occurred only when it was performed second, after the normal vision condition. While speculative, it could be that those who started the experiment with normal vision relied more on the context of the hallway, which drastically changed in the low vision condition. However, those who started with blur did not have that initial hallway context, and therefore may have used a different dynamic strategy similarly for both conditions. Although this was partially ruled out by having all participants encode distance using blur in Experiment 2, it still remains possible that different strategies relating to the different visibility of the hallways could have been used when replicating the path distances in blur and normal vision.
A final alternative explanation for the overestimation found when walking with blur is an effort-based account, which we believe has been ruled out by our prior findings (Rand, Barhorst-Cates, & Creem-Regehr, 2016). This account proposes that when participants were asked to recall the distance recently traveled, intrusions of increased physical challenges faced when traveling the space with blurred vision (i.e. obstacle detection and avoidance, walking in a straight line) would lead participants to remember that they walked farther. This account is consistent with work conducted by Cohen, Baldwin, and Sherman (1978) that demonstrated that individuals overestimated distances in environmental regions that contained hills relative to flat regions. To test this account, Rand et al. (2016) reduced the physical effort involved in locomotion by pushing participants in a wheelchair during encoding and compared distance estimations to those estimations made after active walking in blur. The wheelchair afforded a reduction in mobility-related challenges for participants, as it eliminated the need to attend to obstacle avoidance, stability, and other challenges that might make the task of walking with blurred vision highly effortful. Despite this, similar overestimation occurred in both walking and wheelchair conditions, providing little support for the effort hypothesis. Although it remains likely that there is increased effort required when navigating with low vision compared to normal vision, physical effort does not seem to explain overestimation of distance judgments.
While this work was conducted with healthy young adults with simulated degraded acuity and contrast sensitivity, one of our aims is to consider the implications to clinical low vision patients. The use of simulated degraded vision allowed us greater control of the level of the impairment between participants compared to using a clinical low vision sample, as low vision patients vary widely in the extent of acuity/contrast degradation and central/peripheral field loss. However, the limitation of generalizability should be acknowledged. For example, it remains unknown whether individuals with vision loss calibrate their distance and speed judgments with experience, and the potential timeline for any possible recalibration. The current work may generalize most directly to individuals who have recently lost visual acuity and contrast sensitivity, as our simulation is essentially an acute onset of degraded vision. Despite the potential differences between clinical and simulated low vision, some low vision perception work shows similar performance in tasks of detection and recognition of large-scale environmental features (Bochsler, Legge, Gage, & Kallie, 2013). As such, the systematic overestimation of perceived distance traveled in degraded vision found in the current studies, regardless of estimation method or locomotion type, suggests that training designed to specifically reduce that overestimation may be beneficial for individuals with low vision. Given the relationship between distance judgments and spatial learning, these findings also suggest that reduced visual acuity and/or contrast sensitivity may lead to biases in spatial representations of novel environments.
Conclusions
This work extends prior low vision perception and navigation work from our lab by further defining how estimates of relatively far distances traveled are influenced by severely reduced acuity and contrast sensitivity. Here we have shown that perception of distance traveled is overestimated in these degraded viewing conditions when compared to locomotion with normal vision, and this effect is consistent with an overestimation in perception of speed. Given that perception of distance traveled likely contributes to representations of spatial layout acquired through locomotion, these results have implications for understanding and facilitating better navigation and spatial learning in those with low vision.
Acknowledgments
This Research was supported by the National Eye Institute of the National Institutes of Health (Grant R01EY017835). The content is solely the responsibility of the authors and does not necessarily represent the official views of the National Institutes of Health.
Footnotes
Ethical Approval
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki declaration and its later amendments or comparable ethical standards.
These results contrast with on-average accurate dynamic updating of distance when walking without vision after static viewing—often referred to as blind walking (Loomis, Silva, Fujita, & Fukusima, 1992; Rieser, Ashmead, Taylor, & Youngquist, 1990)—which may be due to the typically shorter distances used, or the nature of the explicit visually-directed walking task to a known target.
Here, the overestimation in blur occurred only after estimates were made with normal vision. It could be that those who walked with blur first learned that visual information was unreliable and weighted body-based cues for distance traveled more heavily, leading to more accurate judgments. This effect is consistent with the general finding that distance estimates after walking without vision are more accurate than when vision is added (e.g., Sun, Campos, Young, et al., 2004).
References
- Barhorst-Cates EM, Rand KM, & Creem-Regehr SH (2017). Let me be your guide: physical guidance improves spatial learning for older adults with simulated low vision. Experimental Brain Research, 235(11), 3307–3317. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Bochsler TM, Legge GE, Gage R, & Kallie CS (2013). Recognition of ramps and steps by people with low vision. Investigative Ophthalmology & Visual Science, 54(1), 288–294. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Bremmer F, & Lappe M (1999). The use of optical velocities for distance discrimination and reproduction during visually simulated self motion. Experimental Brain Research, 127, 33–42. [DOI] [PubMed] [Google Scholar]
- Campos JL, Butler BC, & Bülthoff HH (2012). Multisensory integration in the estimation of walked distances. Experimental Brain Research, 218(4), 551–565. [DOI] [PubMed] [Google Scholar]
- Campos JL, Byrne P, & Sun HJ (2010). The brain weights body-based cues higher than vision when estimating walked distances. European Journal of Neuroscience, 31(10), 1889–1898. [DOI] [PubMed] [Google Scholar]
- Frenz H, Bremmer F, & Lappe M (2003). Discrimination of travel distances from ‘situated’ optic flow. Vision Research, 43, 2173–2183. [DOI] [PubMed] [Google Scholar]
- Frenz H, & Lappe M (2005). Absolute travel distance from optic flow. Vision Research, 45, 1679–1692. [DOI] [PubMed] [Google Scholar]
- Frenz H, Lappe M, Kolesnik M, & Bülhrmann T (2007). Estimation of travel distance from visual motion in virtual environments. ACM Transactions on Applied Perception, 4(1), 1–18. [Google Scholar]
- Gibson JJ (1950). The Perception of Visual Surfaces. American Journal of Psychology, 63, 367–384. [PubMed] [Google Scholar]
- Glasauer S, Schneider E, Grasso R, & Ivanenko a. Y. P. (2007). Space-Time Relativity in Self-Motion Reproduction. Journal of Neurophysiology, 97, 451–461. [DOI] [PubMed] [Google Scholar]
- Glasauer S, Stein A, Günther AL, Flanagin VL, Jahn K, & Brandt T (2009). The effect of dual tasks in locomotor path integration. Annals of the New York Academy of Sciences, 1164(1), 201–205. [DOI] [PubMed] [Google Scholar]
- Harris LR, Herpers R, Jenkin M, Allison RS, Jenkin H, Kapralos B, … Felsner S (2012). The relative contributions of radial and laminar optic flow to the perception of linear self-motionHarris et al. Journal of Vision, 12(10), 7–7. [DOI] [PubMed] [Google Scholar]
- Kalia AA, Schrater PR, & Legge GE (2013). Combining path integration and remembered landmarks when navigating without vision. PLoS ONE, 8(9), e72170. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Kuyk T, & Elliott JL (1999). Visual factors and mobility in persons with age-related macular degeneration. Journal of Rehabilitation Research and Development, 36(4), 303–312. [PubMed] [Google Scholar]
- Lappe M, Jenkin M, & Harris LR (2007). Travel distance estimation from visual motion by leaky path integration. Experimental Brain Research, 180(1), 35–48. [DOI] [PubMed] [Google Scholar]
- Lappin JS, Shelton AL, & Rieser JJ (2006). Environmental Context Influences Visually Perceived Distance. Perception & Psychophysics, 68(4), 571–581. [DOI] [PubMed] [Google Scholar]
- Larish JF, & Flach JM (1990). Sources of optical information useful for perception of speed of rectilinear self-motion. Journal of Experimental Psychology: Human Perception and Performance, 16(2), 295. [DOI] [PubMed] [Google Scholar]
- Lee DN (1976). A theory of visual control of braking based on information about time-to-collision. Perception, 5, 437–459. [DOI] [PubMed] [Google Scholar]
- Legge GE, Gage R, Baek Y, & Bochsler TM (2016). Indoor Spatial Updating with Reduced Visual Information. PLoS ONE, 11(3), e0150708. doi:doi: 10.137/journalpone.0150708 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Loomis JM, Silva JAD, Fujita N, & Fukusima SS (1992). Visual Space Perception and Visually Directed Action. Journal of Experimental Psychology: Human Perception and Performance, 18(4), 906–921. [DOI] [PubMed] [Google Scholar]
- Magel SG, & Sadalla EK (1980). The Perception of Traversed Distance. Environment and Behavior, 12(1), 65–79. [Google Scholar]
- Mittelstaedt M-L, & Mittelstaedt H (2001). Idiothetic navigation in humans: estimation of path length. Experimental Brain Research, 139(3), 318–332. [DOI] [PubMed] [Google Scholar]
- Mohler BJ, Thompson WB, Creem-Regehr SH, Pick HL Jr., & Warren WH (2007). Visual flow influences gain transition speed and preferred walking speed. Experimental Brain Research, 181(2), 221–228. [DOI] [PubMed] [Google Scholar]
- Mohler BJ, Thompson WB, Creem-Regehr SH, Willemsen P, Pick HL Jr., & Rieser JJ (2007). Calibration of locomotion resulting from visual motion in a treadmill-based virtual environment. ACM Transactions on Applied Perception, 4(1), 1–15. [Google Scholar]
- Pelli DG (1987). The Visual Requirements of Mobility. Low Vision: Principles and Applications, pp. 134–146. [Google Scholar]
- Pretto P, & Chatziastros A (2006). Changes in optic flow and scene contrast affect the driving speed Driving Simulation Conference Europe (pp. 263–272). [Google Scholar]
- Rand KM, Barhorst-Cates EM, & Creem-Regehr SH (2016). Overestimation of distance traveled with degraded vision: Evidence from walking and wheeling. Poster presented at Spatial Cognition 2016, Philadelphia, PA. [Google Scholar]
- Rand KM, Creem-Regehr SH, & Thompson WB (2015). Spatial learning while navigating with severely degraded viewing: The role of attention and mobility monitoring. Journal of Experimental Psychology: Human Perception & Performance, 41(3), 649–664. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Rand KM, Tarampi MR, Creem-Regehr SH, & Thompson WB (2011). The importance of a visual horizon for distance judgments under severely degraded vision. Perception, 40, 143–154. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Rand KM, Tarampi MR, Creem-Regehr SH, & Thompson WB (2012). The influence of ground contact and visible horizon on perception of distance and size under severely degraded vision. Seeing and perceiving, 25(5), 425–447. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Redlick FP, Jenkin M, & Harris LR (2001). Humans can use optic flow to estimate distance of travel. Vision Research, 41, 213–219. [DOI] [PubMed] [Google Scholar]
- Rieser JJ, Ashmead DH, Taylor CR, & Youngquist GA (1990). Visual perception and the guidance of locomotion without vision to previously seen targets. Perception, 19, 675–689. [DOI] [PubMed] [Google Scholar]
- Sargent JQ, Zacks JM, Philbeck JW, & Flores S (2013). Distraction shrinks space. Memory & Cognition, 41(5), 769–780. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Snowden RJ, Stimpson N, & Ruddle RA (1998). Speed perception fogs up as visibility drops. Nature, 392(6675), 450. [DOI] [PubMed] [Google Scholar]
- Stone LS, & Thompson P (1992). Human speed perception is contrast dependent. Vision Research, 12(8), 1535–1549. [DOI] [PubMed] [Google Scholar]
- Sun H-J, Campos JL, & Chan GSW (2004). Multisensory integration in the estimation of relative path length. Experimental Brain Research, 154, 246–254. [DOI] [PubMed] [Google Scholar]
- Sun H-J, Campos JL, Young M, Chan GSW, & Ellard CG (2004). The contributions of static visual cues, nonvisual cues, and optic flow in distance estimation. Perception, 33, 49–65. [DOI] [PubMed] [Google Scholar]
- Sun H-J, Lee A, Campos JL, Chan GSW, & Zhang DH (2003). Multisensory integration in speed estimation during self-motion in a virtual environment. CyberPsychology and Behaviour, 6(5), 509–518. [DOI] [PubMed] [Google Scholar]
- Tarampi MR, Creem-Regehr SH, & Thompson WB (2010). Intact spatial updating with severely degraded vision. Attention, Perception, & Psychophysics, 72(1), 23–27. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Thompson WB, Legge GE, Kersten DJ, Shakespeare RA, & Lei Q (2017). Simulating visibility under reduced acuity and contrast sensitivity. J. Opt. Soc. Am. A, 34(4), 583–593. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Turano KA, Broman AT, Bandeen-Roche K, Munoz B, Rubin GS, & West SK (2004). Association of visual field loss and mobility performance in older adults: Salisbury Eye Evaluation Study. Optometry & Vision Science, 81(5), 298–307. [DOI] [PubMed] [Google Scholar]
- Warren WH, & Hannon DJ (1988). Direction of self-motion is perceived from optical flow. Nature, 336, 162–163. [Google Scholar]
- Witt JK, Stefanucci JK, Riener CR, & Proffitt DR (2007). Seeing beyond the target: Environmental context affects distance perception. Perception, 36, 1752–1768. [DOI] [PubMed] [Google Scholar]