

Abstract
Background
Training non-human primates (NHPs) for translational medical experimentation is an essential yet time consuming process. To increase training efficiency, some training systems have been designed for NHPs to use at their home cages. Several autonomous cage-side tablet-based systems have been proposed, but none of these systems allow for remote monitoring and task modification while also being wireless, low-cost, light weight, and portable.
New Method
Here we present ACTS: an Autonomous Cage-side Training System which meets all these criteria. ACTS consists of 1) a touchscreen tablet and a speaker attached to the subject’s home cage, 2) an inexpensive reward system made from a slightly modified fish feeder, and 3), a laptop operating the system wirelessly and remotely via a router.
Results
We were able to test the system and wirelessly train two macaques in their home cages. Remote access enabled us to control ACTS from up to 90 meters, through up to 3 walls, and through a floor of a building. The device is compatible with different reward pellet sizes and could run about two hours with a ~4 mm pellet size. The animals were able to generalize the task when transferred to a traditional experimental rig.
Comparison with Existing Methods
The low cost and modest skill required to build and implement ACTS lowers the barrier for NHP researchers and caregivers to deploy autonomous, remotely controlled tablet-based cage-side systems.
Conclusion
ACTS can be used for low-cost, wireless cage-side training of NHPs being prepared for translational medical experimentation.
Keywords: non-human primate, autonomous training, cage-side training
1. Introduction
Computer-based systems have been used for decades to train non-human primates (NHPs) and perform experiments (Perdue et al., 2018). To increase NHP learning speed and reduce the effort and attention required of researchers, some computer-based systems have been designed for NHPs to use at their home cages. Home cage training systems reduce the burden on researchers who would be required to transport subjects to an experimental rig for each training session and closely monitor the subject throughout the session. Cage-side systems not only allow researchers to monitor subjects remotely, but also have the added benefit of allowing researchers to begin training subjects on tasks even before the subjects are trained to be transported to experimental rigs. This is desirable because it has been observed that training NHPs before introduction to research facilities can improve initial performance at the facility (Tulip et al., 2017). Additionally, training in the home cage can reduce stress levels for some subjects (Bonini, 2019).
Here we propose a touchscreen-based training system that is autonomous, wireless, low-cost, light weight, portable, sturdy, designed for remote subject monitoring and task modification, and configurable to different cage varieties. The system is easily integrated with other lab hardware and is implementable and modifiable by researchers with modest levels of background in hardware and software. We call our system the Autonomous Cage-Side Training System (ACTS). Our user-friendly system is designed to train NHPs in their home cages to perform motor tasks detected by a touchscreen.
Several published touchscreen-based systems meet some but not all of the characteristics fulfilled by ACTS. Touchscreen-based systems have been reported as wireless (Butler & Kennerley, 2019; Calapai et al., 2017), low-cost (Butler & Kennerley, 2019), light weight (Butler & Kennerley, 2019; Calapai et al., 2017), and portable (M. Berger et al., 2018; Butler & Kennerley, 2019; Calapai et al., 2017; Perdue et al., 2018; Truppa et al., 2010), but to our knowledge no published system has met each of these requirements while also allowing for remote subject monitoring and task modification.
Our proposed ACTS can be broadly used for NHP training, experimentation, and enrichment. We demonstrate an application of ACTS by training rhesus macaques to perform a touchscreen-based visually-guided motor task.
2. Materials and Methods
We designed ACTS to present animal subjects such as NHPs with tasks and corresponding rewards. ACTS operates by sending MATLAB screen data from a laptop to a tablet, which then sends touch information back to the laptop. Based on the inputs provided from the tablet, the laptop wirelessly controls a feeder and speaker via a Wi-Fi transmitter/receiver. A summary schematic is depicted in Figure 1. The cage-side components of ACTS consist of 1) an aluminum structure supporting a tablet and a speaker to present tasks for the subject, 2) a feeder and tubing to provide rewards to the subject, and 3) an electronics box to house the electronic interfaces between the components. The complete cage-side system, which is approximately 5 kg, is attached to the cage. A laptop running MATLAB (2019a; MathWorks, Natick, MA) controls the cage-side components remotely via a wireless router.
Figure 1:
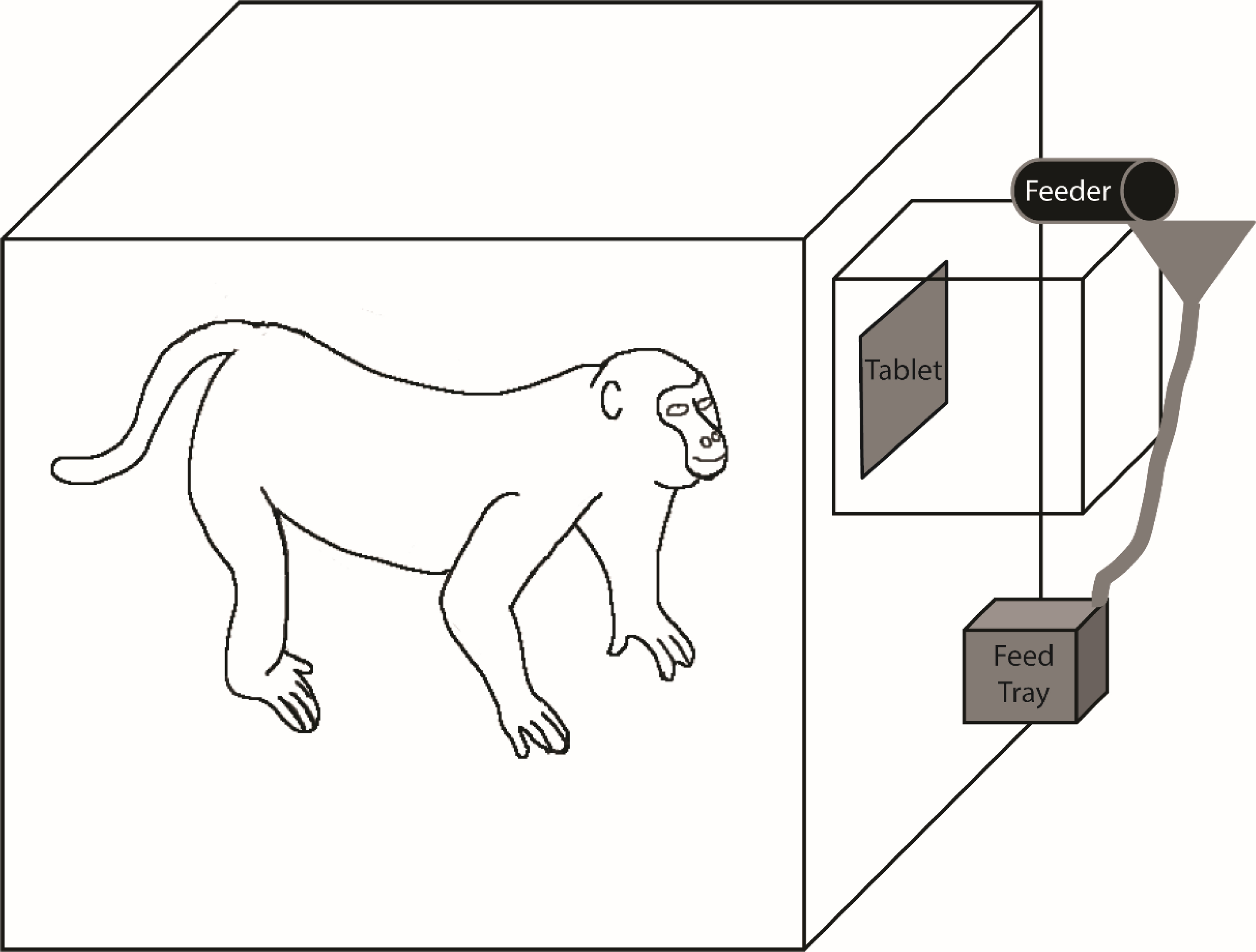
System overview. ACTS consists of a structure on which is mounted a tablet, a feeder, and a funnel and tubing to dispense the food rewards into a cage-mounted feed tray. Other electrical components (not shown) necessary to run ACTS are also mounted on the structure.
2.1. Subjects
The system was used by two healthy adult male rhesus macaques (Macaca mulatta, weight range 14.5–15.5 kg, age range 6–7 years). The subjects were socially housed. Water was made available ad libitum and no special food restriction or scheduling measures were taken. All animal care and experiments, including the use of ACTS, is approved by the University of Washington’s Office of Animal Welfare, the Internal Animal Care and Use Committee, and the Washington National Primate Research Center.
2.2. Structure and tablet
We designed the aluminum structure holding the cage-side components (Figure 2A) to be adaptable to different cage designs. For our research purposes we prepared the auxiliary components to fit Seattle-type cages (Figure 2B–D; Lab Products, Seaford, DE). The aluminum structure supporting the cage-side components is a sturdy cuboid constructed with aluminum T-slot bars (80/20 Inc., Columbia City, IN) and measures approximately 25 × 36 × 25 cm (Figure 2C, D). These dimensions allow the aluminum structure to be securely attached to the caging with angled brackets and padlocks such that electrical components and moving parts are held out of reach of our subjects (Figure 2B, D). We designed the aluminum structure to be easily attached to the cage with the angled brackets and padlocks by a single researcher in 1–2 minutes. To allow the subject to touch the screen of the tablet while reducing the chance of the subject tampering with the buttons and plugs on the edges of the tablet, the edges of the aluminum structure and tablet were covered with sturdy, opaque scrap plastic (Figure 2A). We wedged the top and bottom edges of the tablet into the slots in the T-slot bars (Figure 2C, D). This prevents the tablet from being removed from the aluminum structure without a screwdriver, yet extra length of the aluminum bars still allows researchers to slide the tablet left and right ~2 cm along the slots in the aluminum structure to allow easier access to the tablet home button during ACTS setup (Figure 2B). In theory, the subjects can also slide the tablet, so the addition of a set screw was considered to keep the tablet in place. In practice, however, the slots alone provide enough friction that we do not observe the subjects sliding the tablet during use.
Figure 2:
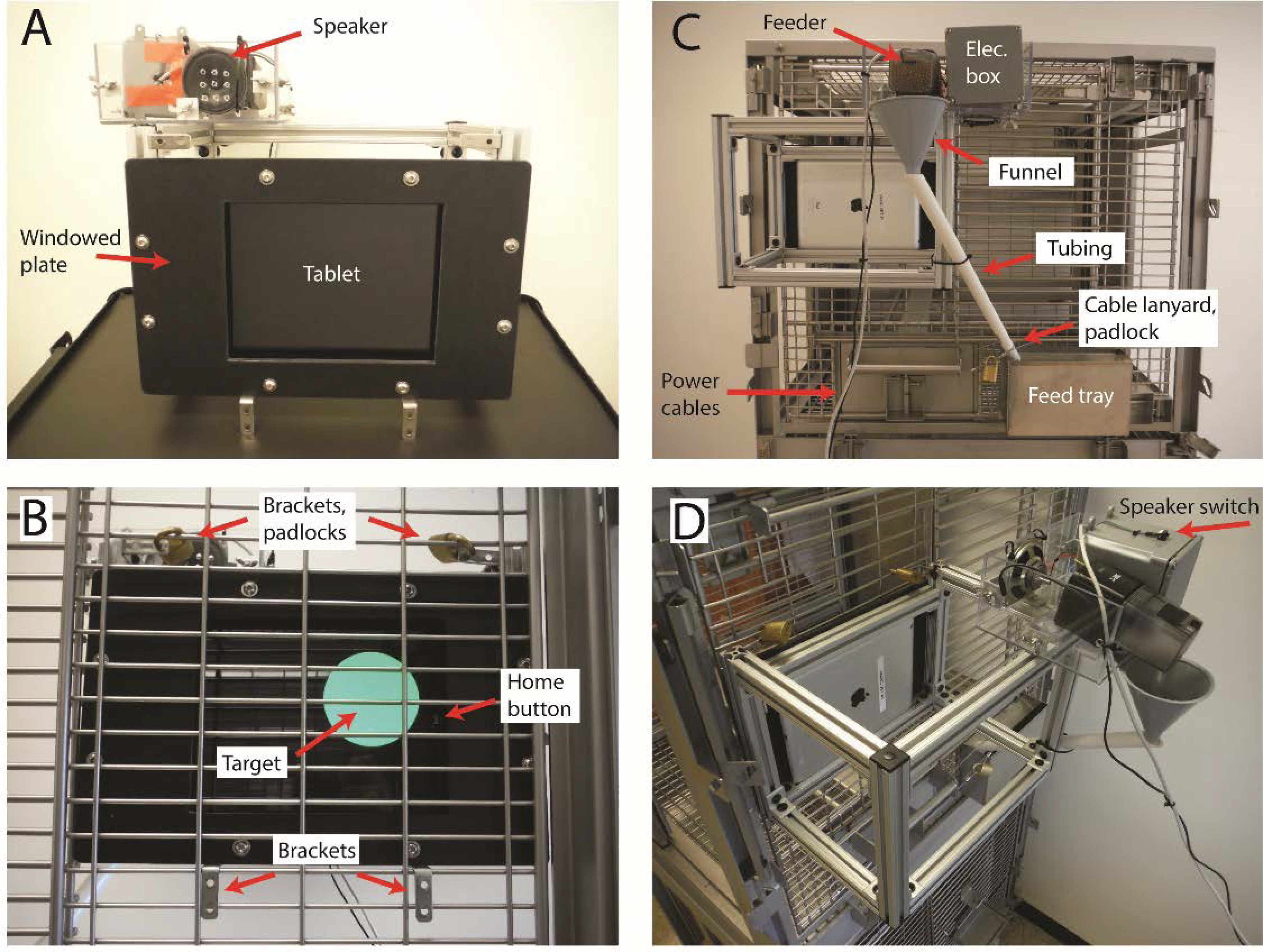
Mechanical setup. (A) The structure as viewed from the front. A protective windowed plate was installed to prevent the NHPs from easily pulling on the tablet. Note that the tablet home button is obscured from view. A box was mounted on the back of the structure to contain the feeder, speaker, and electronics. Holes were drilled through the side of the box to improve the acoustics of the speaker. (B) The structure as viewed from within the cage. The two angled brackets above the windowed plate allow the structure to be secured to the bars of the cage with padlocks and the two angled brackets below the windowed plate allow the structure to rest on the bars of the cage. An example target is displayed on the screen. The tablet home button is visible simply to show that researchers may slide the tablet to reveal the button during ACTS setup and then slide the tablet back into place to once again obscure the view of the button. (C) The structure as viewed from the back, mounted on the front of the cage. A funnel and tubing were attached to guide rewards from the feeder to the feed tray. A cable lanyard and padlock serve to restrain movement of the tubing. Power cables for the feeder and other electrical components are routed down the back of the structure. A plastic electrical box provides protection for the electronics which interface between the router, feeder, and speaker. (D) The structure as viewed from an isometric angle. A small speaker switch is secured to the top of the electronics box.
2.3. Reward system
The reward system consists of a fish feeder with a rotating hopper (HDE, Allentown, PA) and a piping system to guide rewards into the subject’s feed tray. To hold the piping system, we constructed a box with acrylic plastic and attached it to the top back corner of the aluminum structure with bolts and wingnuts out of reach of the subjects. The feeder is secured in this box with velcro and propped on scrap acrylic to provide a convenient angle for gravity to aid in reward delivery (Figure 2D). To release rewards, the motor of the feeder rotates the hopper a full turn which briefly positions an opening in the hopper such that food rewards exit the hopper due to gravity. This opening can be manually adjusted in size to accommodate different sizes of food rewards and to vary the average number of food rewards dispensed for each successful trial. The hopper holds up to roughly 120 ml of food rewards. We used glue to connect a funnel and polyvinyl chloride (PVC) tubing together and subsequently used a bolt and wingnut (not shown), a plastic cable tie, and a cable lanyard and padlock to fit the funnel and tubing to the aluminum structure such that rewards are deposited into the cage feed tray (Figure 2C).
2.4. Physical arrangement of electrical components
To drive the feeder and the speaker (Adafruit.com, Product ID: 1314; New York, NY), we use a Wi-Fi transmitter/receiver (ESP-01S, ESP8266; STEMedu, Beijing, China) powered by a power supply converter (USB to ESP-01 Adapter, CH240G; STEMedu, Beijing, China). These electronics are housed in an opaque plastic box (Figure 2C). The footprints of the electrical components are small, but the box selected to house the components was relatively large to allow easier maintenance access and to allow room for excess wire length to be bundled. The power switch for the speaker is mounted to the outside of the opaque plastic box for convenient manual access (Figure 2D). The opaque plastic box is mounted in the acrylic box with the feeder and speaker. The speaker is connected to the front of the acrylic box with plastic cable ties. Holes were drilled into the front of the acrylic box to improve acoustic propagation from the speaker (Figure 2A).
2.5. Wireless system and tablet
We operate the cage-side components with a laptop (MacBook Air, Early 2015, 1.6 GHz Intel Core i5, 8 GB 1600 MHz DDR3, Intel HD Graphics 6000 1536 MB, OS X Yosemite version 10.10.5; Apple Inc., Cupertino, CA) which communicates wirelessly with a Wi-Fi router (WRT54GL, Wireless-G 2.4 GHz, 54 Mbps; Linksys, Irvine, CA) on a private network. The router communicates wirelessly with the tablet (iPad, MD510LL/A, version 10.3.3 (14G60); Apple Inc., Cupertino, CA) and with the Wi-Fi transmitter/receiver. A schematic of the system is shown in Figure 3A.
Figure 3:
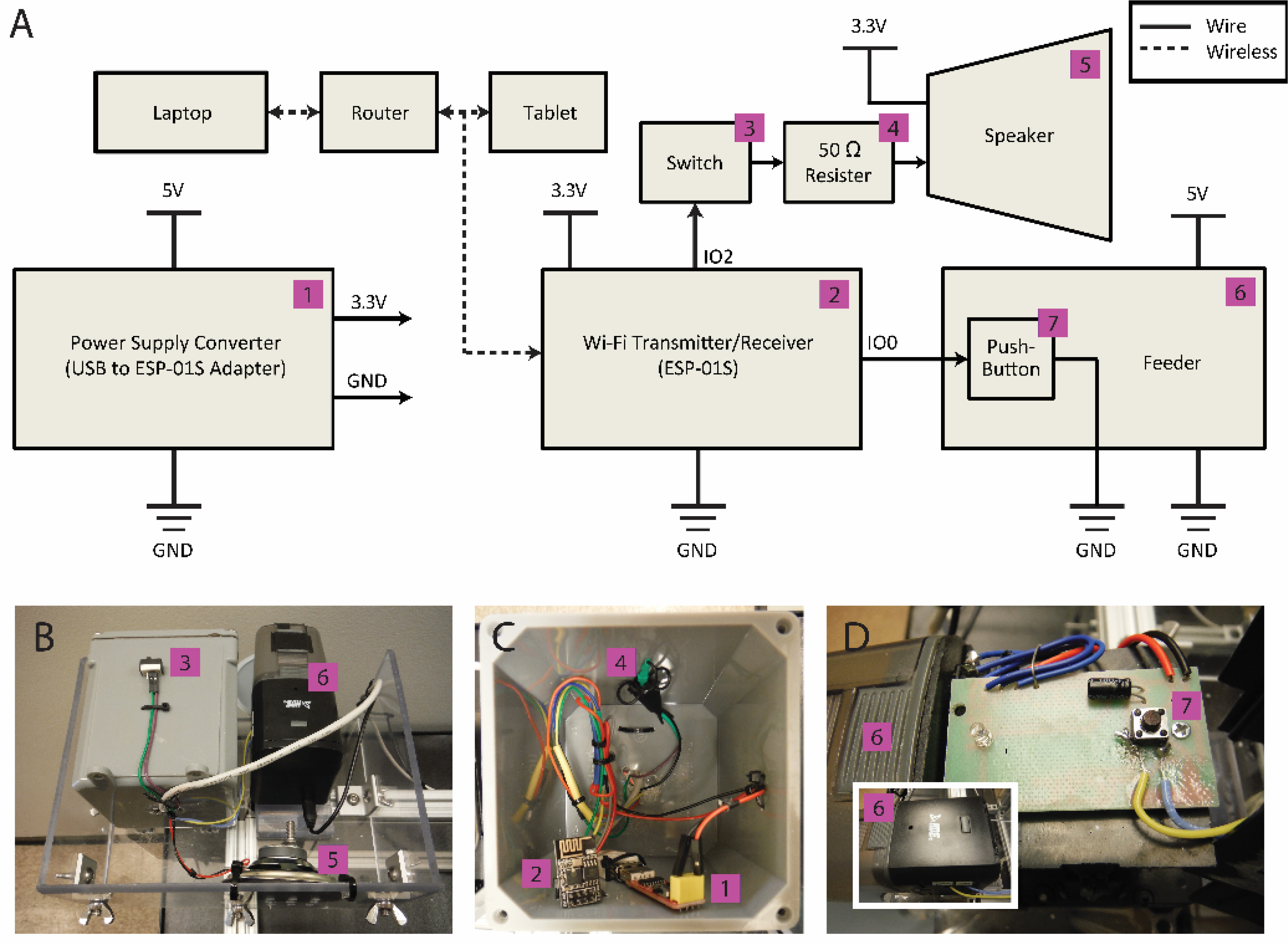
Electrical schematic. (A) The entire ACTS system is driven by custom MATLAB code running on a laptop. The laptop communicates via Wi-Fi through a router to both the tablet and the Wi-Fi transmitter/receiver (ESP-01S). The Wi-Fi transmitter/receiver is powered by a power supply converter (USB to ESP-01S Adapter) which is plugged into a standard wall power outlet via a USB cable and wall adapter. The IO2 port of the Wi-Fi transmitter/receiver is wired to the speaker via a switch and a 50 Ω resister. The switch is necessary to disconnect the Wi-Fi transmitter/receiver from the speaker during startup and the resister is necessary to improve impedance matching. The speaker is powered by the power supply converter. The IO0 port of the Wi-Fi transmitter/receiver is wired directly to the pushbutton of the feeder. The feeder is plugged into a standard wall power outlet via a USB cable and wall adapter. (B) A box mounted on the back of the structure contains the feeder, speaker, and electrical box, on which is affixed the speaker switch. (C) The power supply convertor, Wi-Fi transmitter/receiver, and resister are all stationed inside the electrical box with plastic cable ties. Wires were given enough length to allow the electronics to be manipulated by hand outside of the electrical box as needed. (D) The feeder shown with its casing both removed and intact (inset picture). Wires were soldered to pins of the pushbutton to allow for wireless operation: The yellow wire delivers the signal from the Wi-Fi transmitter/receiver and the blue wire is tied to ground. The jackets of the wires were glued to the electrical board of the feeder to reduce risk of mechanical stress on the solder points. The wires were routed out of holes drilled in the casing of the feeder to allow integration with the other electronics.
2.6. Cage-side electronics
The cage-side electronics include the feeder, speaker (Figure 3A, B), Wi-Fi transmitter/receiver, and power supply converter (Figure 3A, C) required to run ACTS. The Wi-Fi transmitter/receiver is powered from the wall via the power supply converter (Figure 3C). After downloading the Wi-Fi transmitter/receiver driver (Mihalko, 2016) to the laptop, we used the Arduino IDE (Arduino AG, Somerville, MA) to program the Wi-Fi transmitter/receiver to receive commands from the router and then drive the feeder and the speaker via general purpose input/output (IO) pins (Figure 3B, C). Wires were soldered to pins of the button which activated the feeder in order to allow the Wi-Fi transmitter/receiver to drive the feeder directly (Figure 3D). A switch is used to turn the speaker on and off (Figure 3B). Due to a limitation of the Wi-Fi transmitter/receiver, the speaker is required to be turned off during the initial ~20 seconds of power-up when the Wi-Fi transmitter/receiver establishes a wireless connection with the router. The feeder is powered from the wall separately from the power supply converter.
2.7. Screen-sharing and data storage
We designed ACTS to run with screen-sharing software (Yam Display, Yamdisplay.com; Yamstu Inc. Seoul, South Korea) which allows the tablet to be treated as an additional screen of the laptop. For best results, we disable the feature allowing the user to zoom in and out with a pinch action, which is called pinch-zoom. We also employ the tablet’s “Guided Access” feature to disable the subjects from exiting the screen-sharing app without a passcode. The screen-sharing software did not support audio, thus necessitating a separate speaker. To reduce the likelihood of connectivity issues, the priority levels of the MATLAB and screen-sharing applications are increased in the laptop’s operating system. All data generated by the subjects is recorded on the laptop’s internal hard drive. Data is saved at the end of each trial to protect against data loss in the case of unexpected laptop failure and to give researchers immediate access to the data.
2.8. Tasks
We created three tasks to be displayed on the tablet using MATLAB and the open source Psychophysics Toolbox extensions, version 3 (Brainard, 1997; Kleiner et al., 2007; Pelli, 1997). The first is a touch task, which simply requires the subject to touch a start target in order to generate a reward. The second is a delayed reach task requiring the subject to touch the start target and wait for a go tone before touching an end target. The third is a two-forced choice task which requires the subjects to touch the start target, wait for the go tone which plays one of two sounds, and then touch one of two identical end targets as instructed by the go tone. Due to the limited capabilities of the screen-sharing software, this system is not designed for multi-touch use.
2.9. System security
The main security risk of ACTS is unauthorized control of the tablet’s cameras. To address this risk, two key cautionary measures have been taken. Firstly, ACTS is designed to be run entirely on a private network which would hinder nefarious activity. Secondly, the user-facing camera of the tablet is physically obscured by the windowed plate and the rear-facing camera is physically obscured with a piece of tape.
3. RESULTS
We tested different aspects of ACTS to ensure its utility for NHP training, experimentation, and enrichment. We also recorded the cost of components to highlight the low financial barrier of ACTS implementation.
3.1. NHP training and data collection
We trained two adult male rhesus macaques, Monkey H and Monkey L, on the touch task using ACTS. Subjects were housed independently while using ACTS. The router and laptop were located in a different room two walls away from the subjects, which amounted to approximately 6 meters distance. Because aspects of our lab’s research ultimately must be performed in a traditional experimental rig, the subjects were introduced to the same touch task in our experimental rig after learning the task on ACTS. When transitioned to the rig, the subjects readily began attempting the task.
ACTS saved data from individual trials for analysis (Figure 4A). We performed analysis across multiple sessions to monitor success rates (Figure 4B) and to analyze relationships between other variables. Parameters were changed session to session, and sometimes within sessions, and the results presented are a simplified summary.
Figure 4:
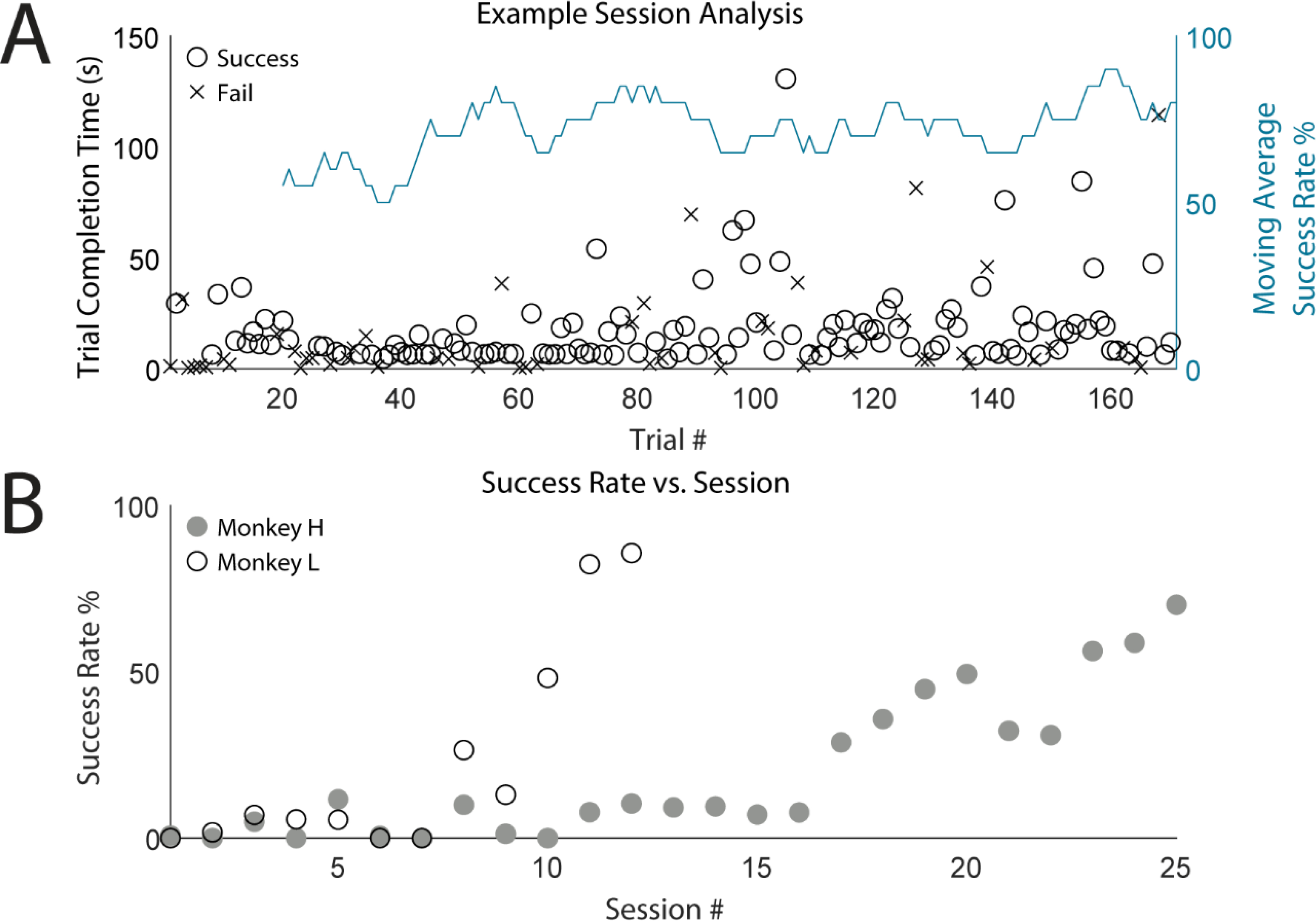
NHP usage results. (A) Results from an example touch task session are displayed. Time taken to complete each successful and failed trial are shown, as well as a 20 trial moving average success rate. (B) Two monkeys were trained with ACTS to perform the touch task and their success rate for each session is plotted chronologically. Sessions with ten trials or fewer were excluded from the plot.
3.2. Food rewards
Before introducing ACTS to the subjects, a variety of food rewards were tested with the feeder, funnel, and tubing. We found that, in general, round, hard, low-friction food rewards were most compatible with the system. We also found that food rewards which get sticky with prolonged exposure to warm and humid environments should be avoided to prevent the system from jamming. Additionally, small food rewards naturally increased the number of trials that could be run before the hopper of the feeder required refilling. We selected Wilton Jumbo Nonpareils as the initial food rewards for both subjects because they had characteristics desirable for use with the system and they were relatively inexpensive. We observed that Monkey L responded to these rewards but Monkey H was relatively uninterested, so we switched to 45 mg chocolate flavored nutritional rat pellets (commonly used by rat laboratories) or a combination of the two rewards for Monkey H. This appeared to increase motivation while being compatible with the system. Both pellet types were roughly spherical and measured approximately 4 mm in diameter. Some of the feed trays had drainage holes big enough that the rewards would fall through the bottom of the tray, so we swapped these trays out for a tray with smaller drainage holes as needed.
The adjustable opening of the hopper was positioned to allow an approximate average of 5 pellets to be dispensed for each rotation of the feeder. This configuration could allow for an estimated 400 successful trials without refilling the hopper, although we usually ran shorter sessions. Trial completion times and success rates were variable, but an estimate of 10–20 seconds on average per trial at a 100% success rate suggested that a full hopper could provide about 2 hours of training.
3.3. Wireless distance
ACTS relied on a private Wi-Fi network broadcast by a Wi-Fi router to communicate wirelessly between the laptop, the tablet, and the electronics that control the feeder and speaker. While effective wireless distance may vary for different groups based on facility layouts and other factors, we tested our system to provide example data. In a hallway without obstructions we demonstrated that cage-side components could operate up to approximately 90 meters away from the router. We also demonstrated that up to three walls can separate the cage-side components and the router, totaling approximately 6 meters, and we demonstrated that cage-side components and the router can be separated by a floor of a building.
3.4. Cost
Throughout this work, efforts were taken to limit the cost of ACTS which is detailed in Table 1. In many cases we used equipment and programs already available in our lab and which are likely available in other labs. When we did not have readily available components we used low-cost selections.
Table 1:
Cost of parts, supplies, and programs used in ACTS in USD.
| Item | Cost |
|---|---|
| Laptop | $ 500 * |
| Structural components | $ 166 |
| MATLAB license | $ 135 * |
| Tablet | $ 100 * |
| Wi-Fi router | $ 53 * |
| Feeder | $ 22 |
| Wiring | $ 10 * |
| ESP-01S and USB adapter | $ 8 |
| Lab tape | $ 6 * |
| Cable ties | $ 5 * |
| Electrical switch | $ 4 * |
| Solder | $ 4 * |
| Super glue | $ 3 * |
| Funnel | $ 2 * |
| Speaker | $ 2 |
| Tubing | $ 2 * |
| Electrical box | $ 1 * |
| Arduino IDE | $ 0 ** |
| CH240G driver (for ESP-01 to USB Adapter) | $ 0 ** |
| Psychophysics Toolbox 3 | $ 0 ** |
| Yam Display | $ 0 ** |
| Estimated total | $ 1023 |
Costs of parts that were available in our laboratory are estimated and indicated with a ‘*’.
Downloaded programs that were free at the time of download are indicated with a ‘**’.
The MATLAB license was purchased through a university-wide arrangement with MathWorks and may not be representative of the price advertised to groups affiliated with other institutions.
4. Discussion
Here we present ACTS: an autonomous, wirelessly monitorable and configurable, light weight, sturdy, low-cost training and reward system adaptable to different cage varieties. ACTS is easily integrated with other lab hardware and designed for researchers with modest levels of background in hardware and software to implement and modify for the purpose of NHP training, experimentation, and enrichment. In addition, as ACTS is a video-based system, it may garner more engagement as a source of enrichment than foraging devices (Bennett et al., 2016). ACTS has been used by two adult rhesus macaques. It is wireless which allows researchers to remotely monitor the performance of the subject and modify the parameters (e.g., target size) of the task presented to the subject throughout a session, or even change tasks entirely. Consequentially, our system offers greater flexibility than the comparable, tablet-based Mymou system (Butler & Kennerley, 2019). Although session durations are variable and maximum session times largely depend on success rate, reward size, and quantity of rewards dispensed per success, we estimate that ACTS can offer 2 hours of continuous use in its current configuration. Importantly, ACTS can be used by any species which can interact with a touch screen, and the rewards used can be small enough to be appropriate even for rat-sized animals.
ACTS is designed to allow subjects to “work from home”, allowing the animals to learn a new task in the least stressful environment. Standard enrichment practices of the Washington National Primate Research Center had already familiarized the subjects with tablet-based enrichment and with target training to a handheld target. The subjects readily transitioned to learning a touch task in context with the full cage-side system (Figure 2C). The remote task monitoring and configuration capabilities offered by ACTS allowed for rapid skills acquisition, however, cage-side performance is insufficient for our final goals. Because we require our subjects to ultimately perform tasks in an experimental rig, the cage-side tasks are designed to be easily generalized to the rig. With this need in mind, our design allows tasks to be introduced in a familiar environment before they are presented in the less familiar experimental rig.
While our subjects were housed independently during use of ACTS, ACTS could feasibly be modified to support data collection in social housing situations by tagging animals with RFIDs or other related technologies (Andrews & Rosenblum, 1994; Fagot & Bonté, 2010; Fagot & Paleressompoulle, 2009; Gazes et al., 2013; Tulip et al., 2017), or by video identification (Butler & Kennerley, 2019; Calapai et al., 2017). Relatedly, duplicate ACTS systems could be used in the same animal room to train multiple animals at the same time, and the tones produced by the speakers could be altered for uniqueness if needed. In addition to training and experimentation, ACTS is also designed to be used for enrichment, much like other computer-based systems for NHPs (Perdue et al., 2018; Washburn & Rumbaugh, 1992).
Except for two USB power cables, both of which could easily be replaced with portable power supplies if desired, ACTS is completely wireless. The wireless communications run on Wi-Fi and have been shown to be efficacious through walls, through a floor of a building, and over considerable unobstructed distances. Moreover, because ACTS can be run on a private network as we have shown, the cage-side components and the controlling laptop could theoretically be separated geographically and still be effective with a strong and secure network connection. We tested Bluetooth wireless technology during development but later switched to Wi-Fi to increase effective wireless distance.
Because the system is operated by a laptop, no data is saved to the tablet itself. Instead, data is saved to the laptop after the completion of each trial. This protects against data loss due to unexpected tablet failure which is an advantage over the Mymou system (Butler & Kennerley, 2019). Furthermore, minor coding changes can also allow the data to be saved to a backup external hard drive or a remote server, although we did not test these options.
ACTS is relatively inexpensive. The cost of ACTS, excluding the MATLAB license and laptop, is roughly that of a single laboratory standard commercial feeder. This is a reasonable comparison because both these items are plausibly readily available in laboratory settings and can be utilized for additional projects beyond those targeted by ACTS. To the authors’ knowledge, the only other touchscreen-based system to have been published with details regarding cost of implementation is the recently published Android tablet-based Mymou system (Butler & Kennerley, 2019) which was comparable in cost to ACTS although the Mymou system publication did not include the cost of its reward-delivery systems. Here we present our reward-delivery method, a fish feeder with minor modifications, which is considerably less expensive than standard laboratory feeder systems and simpler to implement than an open source feeder (Oh et al., 2017).
There are alternatives to the more expensive components of ACTS. For example, free programming languages such as Python could be employed in ACTS. Additionally, the Apple-oriented collection of laptop (MacBook Air), tablet (iPad), and screen-sharing software (Yam Display) could be replaced by products from other brands. This could allow for utilization of equipment that is already available in some laboratory settings without heavily modifying our presented aluminum structure, cage-side components, and MATLAB software. Another possible cost-saving modification to ACTS would be to program and download an app directly to the tablet as this could reduce or eliminate the need for a wireless connection during use. However, since such a system could not be remotely controlled, this modification could limit the researchers’ ability to remotely monitor the performance of the subject and change tasks or task parameters throughout sessions, which is one of the strengths of our system and differentiates our system from the Mymou system (Butler & Kennerley, 2019).
ACTS is designed to be relatively easy to build and implement by other research groups. To provide qualitative evidence, ACTS was built with tools and skills native to our laboratory except for cutting the aluminum and plastic parts of the structure and modifying a feed tray to have smaller drainage holes. The light weight and manageable size of the aluminum structure and cage-side components made the system easily portable, yet the design is sturdy enough to endure use by NHPs. Furthermore, the design is easily adaptable to different varieties of cages.
ACTS is also designed to be easily modified for differing needs of NHP researchers and caregivers. For example, while touchscreen-based activities similar to ACTS are commonly used for NHP work (Berger et al., 2018; Butler & Kennerley, 2019; Calapai et al., 2017; Fagot & Bonté, 2010; Fagot & Paleressompoulle, 2009; Gazes et al., 2013; Mandell & Sackett, 2010; Truppa et al., 2010; Weed et al., 1999), other equipment such as joysticks (Andrews & Rosenblum, 1994; Perdue et al., 2018; Richardson et al., 1990; Washburn & Rumbaugh, 1992), buttons (Tulip et al., 2017), lights, and other electronic or mechanical parts could be integrated into the system. Furthermore, ACTS could be used in conjunction with systems designed to monitor bodily movements of NHPs (Bonini, 2019; Libey & Fetz, 2017). To these ends, the firmware of the Wi-Fi transmitter/receiver (ESP-01S) is easily configurable with Arduino IDE software which is free, widely used in research settings, and has a wealth of online support which is often tailored for users with limited backgrounds in hardware and software. This allows for ACTS to be easily modified to operate other lab equipment such as liquid-based reward systems, lights, robotics, etc. Our chosen Wi-Fi transmitter/receiver only supports two general purpose IO 3.3V transistor-transistor logic (TTL) pins, but other ESP8266-based hardware is available for purchase with more general purpose IO pins. These pins can allow more lab equipment to be integrated with the system. Notably, the increases in cost and size of these ESP8266-based alternatives are generally trivial.
ACTS is designed to complement the growing field of tetherless neurophysiology systems and other tetherless biomedical systems. While tethered neurophysiology research with NHPs is still common and is presently used in our lab (Griggs et al., 2019; Yazdan-Shahmorad et al., 2016, 2018), some groups have begun developing and using tetherless systems (Berger et al., 2020; Borton et al., 2013; Fernandez-Leon et al., 2015; Jackson et al., 2006a, 2006b, 2007; Libey & Fetz, 2017; Milton et al., 2020; Miranda et al., 2010; Schwarz et al., 2014; Shahidi et al., 2019; Su et al., 2016; Yin et al., 2014; Zanos et al., 2011). The modifiability of ACTS makes it a prime candidate to augment tetherless experiments with tablet-based tasks. Experiments such as these will support research of restraint-free behaviors and corresponding physiology.
Tasks were kept as consistent as possible between the cage-side and experimental rig systems by deriving the MATLAB code for ACTS from the MATLAB code for the experimental rig. Once the subjects learned a task with ACTS, they transitioned readily to working on that task in our experimental rig. Because the animals were able to generalize behaviors so effectively, we plan to train them and any future subjects on additional tasks cage-side using ACTS with the goal of transitioning the behaviors to the experimental rig.
4.1. Limitations
We capitalized on freely available software where applicable, and we kept our custom written software simple and easy to modify. These advantages bring about some limitations. Because ACTS relies on screen-sharing software, competition for the cursor can arise if the subject touches the tablet and the researcher attempts to operate the laptop simultaneously. In practice, this means that it is ideal for the researcher to pause the MATLAB program and modify tasks after the subject has completed a successful trial and is busy collecting rewards. Future software development efforts could potentially allow for the subject and researcher to operate ACTS simultaneously. Also, we determined that automatic parameter adjustment features were not necessary because our system can be remotely controlled. However, our MATLAB-based system is easy to modify and the functionality could be added in the future as others have done (Berger et al., 2018; Butler & Kennerley, 2019).
The style of feeder used presents another potential limitation which is its lack of consistency in reward quantity. We chose to sacrifice reward quantity precision in order to select a low-cost feeder. Additionally, we were not concerned with a variance in reward quantity due to literature which suggests variations in rewards can increase motivation (Ferster & Skinner, 1957). An additional limitation of the feeder is the lag in reward delivery. Because the feeder uses a rotation-style hopper, it takes a few seconds for the rewards to be released from the feeder into the funnel, tubing, and ultimately the feed tray. However, the feeder is audible when activated and we have also paired the rotation of the feeder with a reward tone from the speaker which plays immediately after a successful trial. This setup worked well for our application, and we expect it would work well for many others.
Another limitation related to food rewards is that those which work well with ACTS require chewing and are deposited in a tray rather than directly into the mouth of the subject. Both the actions of retrieving and consuming the rewards take time and may slow the rate of trial completion. This characteristic may be ideal for enrichment activities and can be employed in experimental and training scenarios such as ours, especially because the autonomous nature of ACTS reduces the burden on researchers and encourages animals to learn in their home environment and at their own pace. However, we recognize that rewards deposited directly into the mouth of the subject may still be ideal in some scenarios and our system can be modified to operate juice reward systems accordingly.
We estimate that our low-cost feeder, with the configuration used for our subjects, supplies roughly 2 hours of continuous use. If longer sessions are desired, the feeder hopper can be modified accordingly. Furthermore, other similar feeders with larger hoppers can be used instead.
Acknowledgements
The authors would like to thank Toni Haun and the Washington National Primate Center staff for technical help.
This project was supported by the Eunice Kennedy Shriver National Institute of Child Health & Human Development of the National Institutes of Health (K12HD073945, AY), the Washington National Primate Research Center (WaNPCR, P51 OD010425), the and Center for Neurotechnology (CNT, a National Science Foundation Engineering Research Center, EEC-1028725, DJG and JB). This project was also supported by the Mary Gates Endowment for Students (KB and SC), the University of Washington Institute for Neuroengineering (SC), and the University of Washington’s Big Data for Genomics & Neuroscience Training Grant (JB).
Abbreviations:
- ACTS
Autonomous Cage-side Training System
- IDE
integrated development environment
- IO
input/output
- LED
light emitted diode
- NHP
non-human primate
- PVC
polyvinyl chloride
- RFID
radio-frequency identification
- USD
United States dollars
Footnotes
Declarations of Interest
None.
References
- Andrews MW, & Rosenblum LA (1994). Diurnal Pattern of Joystick Use by Bonnet Macaques for Food Reward: Effects of Time-Limited Access. Learning and Motivation, 25, 95–104. [Google Scholar]
- Bennett AJ, Perkins CM, Tenpas PD, Reinebach AL, & Pierre PJ (2016). Moving evidence into practice: cost analysis and assessment of macaques’ sustained behavioral engagement with videogames and foraging devices. American Journal of Primatology, 78(12), 1250–1264. 10.1002/ajp.22579 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Berger M, Calapai A, Stephan V, Niessing M, Burchardt L, Gail A, & Treue S (2018). Standardized automated training of rhesus monkeys for neuroscience research in their housing environment. Journal of Neurophysiology, 119(3), 796–807. 10.1152/jn.00614.2017 [DOI] [PubMed] [Google Scholar]
- Berger Michael, Agha NS, & Gail A (2020). Wireless recording from unrestrained monkeys reveals motor goal encoding beyond immediate reach in frontoparietal cortex. BioRxiv. 10.1101/305334 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Bonini L (2019). Refinement techniques in non-human primate neuroscientific research. Annali Dell’Istituto Superiore Di Sanita, 55(4), 408–412. 10.4415/ANN_19_04_18 [DOI] [PubMed] [Google Scholar]
- Borton DA, Yin M, Aceros J, & Nurmikko A (2013). An implantable wireless neural interface for recording cortical circuit dynamics in moving primates. Journal of Neural Engineering, 10(2), 26010. 10.1088/1741-2560/10/2/026010 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Brainard DH (1997). The Psychophysics Toolbox. Spatial Vision, 10(4), 433–436. [PubMed] [Google Scholar]
- Butler JL, & Kennerley SW (2019). Mymou: A low-cost, wireless touchscreen system for automated training of nonhuman primates. Behavior Research Methods, 51(6), 2559–2572. 10.3758/s13428-018-1109-5 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Calapai A, Berger M, Niessing M, Heisig K, Brockhausen R, Treue S, & Gail A (2017). A cage-based training, cognitive testing and enrichment system optimized for rhesus macaques in neuroscience research. Behavior Research Methods, 49(1), 35–45. 10.3758/s13428-016-0707-3 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Fagot J, & Bonté E (2010). Automated testing of cognitive performance in monkeys: Use of a battery of computerized test systems by a troop of semi-free-ranging baboons (Papio papio). Behavior Research Methods, 42(2), 507–516. 10.3758/BRM.42.2.507 [DOI] [PubMed] [Google Scholar]
- Fagot J, & Paleressompoulle D (2009). Automatic testing of cognitive performance in baboons maintained in social groups. Behavior Research Methods, 41(2), 396–404. 10.3758/BRM.41.2.396 [DOI] [PubMed] [Google Scholar]
- Fernandez-Leon JA, Parajuli A, Franklin R, Sorenson M, Felleman DJ, Hansen BJ, Hu M, & Dragoi V (2015). A wireless transmission neural interface system for unconstrained non-human primates. Journal of Neural Engineering, 12(5), 56005. 10.1088/1741-2560/12/5/056005 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Ferster CB, & Skinner BF (1957). Schedules of reinforcement. Appleton-Century-Crofts. [Google Scholar]
- Gazes RP, Brown EK, Basile BM, & Hampton RR (2013). Automated cognitive testing of monkeys in social groups yields results comparable to individual laboratory-based testing. Animal Cognition, 16(3), 445–458. 10.1007/s10071-012-0585-8 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Griggs DJ, Khateeb K, Philips S, Chan JW, Ojemann W, & Yazdan-Shahmorad A (2019). Optimized large-scale optogenetic interface for non-human primates. SPIE BiOS, 3. 10.1117/12.2511317 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Jackson A, Moritz CT, Mavoori J, Lucas TH, & Fetz EE (2006). The neurochip BCI: towards a neural prosthesis for upper limb function. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 14(2), 187–190. 10.1109/TNSRE.2006.875547 [DOI] [PubMed] [Google Scholar]
- Jackson Andrew, Mavoori J, & Fetz EE (2006). Long-term motor cortex plasticity induced by an electronic neural implant. Nature, 444(7115), 56–60. 10.1038/nature05226 [DOI] [PubMed] [Google Scholar]
- Jackson Andrew, Mavoori J, & Fetz EE (2007). Correlations Between the Same Motor Cortex Cells and Arm Muscles During a Trained Task, Free Behavior, and Natural Sleep in the Macaque Monkey. Journal of Neurophysiology, 97(1), 360–374. 10.1152/jn.00710.2006 [DOI] [PubMed] [Google Scholar]
- Kleiner M, Brainard DH, & Pelli DG (2007). What’s new in Psychtoolbox-3? Perception 36 ECVP Abstract Supplement. [Google Scholar]
- Libey T, & Fetz EE (2017). Open-source, low cost, free-behavior monitoring, and reward system for neuroscience research in non-human primates. Frontiers in Neuroscience, 11(MAY), 1–12. 10.3389/fnins.2017.00265 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Mandell DJ, & Sackett GP (2010). Standard and Computer Testing Methods. Gene, 51(1), 1–13. 10.1002/dev.20329.Comparability [DOI] [PMC free article] [PubMed] [Google Scholar]
- Mihalko A (2016). CH340G CH34G CH34X Mac OS X driver: CH34x_Install_V1.3.pkg. https://github.com/adrianmihalko/ch340g-ch34g-ch34x-mac-os-x-driver
- Milton R, Shahidi N, & Dragoi V (2020). Dynamic states of population activity in prefrontal cortical networks of freely-moving macaque. Nature Communications, 11(1), 1948. 10.1038/s41467-020-15803-x [DOI] [PMC free article] [PubMed] [Google Scholar]
- Miranda H, Gilja V, Chestek CA, Shenoy KV, & Meng TH (2010). HermesD: A High-Rate Long-Range Wireless Transmission System for Simultaneous Multichannel Neural Recording Applications. IEEE Transactions on Biomedical Circuits and Systems, 4(3), 181–191. 10.1109/TBCAS.2010.2044573 [DOI] [PubMed] [Google Scholar]
- Oh J, Hofer R, & Fitch WT (2017). An open source automatic feeder for animal experiments. HardwareX, 1, 13–21. 10.1016/j.ohx.2016.09.001 [DOI] [Google Scholar]
- Pelli DG (1997). The VideoToolbox software for visual psychophysics: Transforming numbers into movies. Spatial Vision, 10(4), 437–442. [PubMed] [Google Scholar]
- Perdue BM, Beran MJ, & Washburn DA (2018). A computerized testing system for primates: Cognition, welfare, and the Rumbaughx. Behavioural Processes, 156(January 2017), 37–50. 10.1016/j.beproc.2017.12.019 [DOI] [PubMed] [Google Scholar]
- Richardson WK, Washburn DA, Hopkins WD, Savage-rumbaugh ES, & Rumbaugh DM (1990). The NASA/LRC computerized test system. Behavior Research Methods, Instruments, & Computers, 22(2), 127–131. 10.3758/BF03203132 [DOI] [PubMed] [Google Scholar]
- Schwarz DA, Lebedev MA, Hanson TL, Dimitrov DF, Lehew G, Meloy J, Rajangam S, Subramanian V, Ifft PJ, Li Z, Ramakrishnan A, Tate A, Zhuang KZ, & Nicolelis MAL (2014). Chronic, wireless recordings of large-scale brain activity in freely moving rhesus monkeys. Nature Methods, 11(6), 670–676. 10.1038/nmeth.2936 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Shahidi N, Schrater P, Wright T, Pitkow X, & Dragoi V (2019). Population coding of strategic variables during foraging in freely-moving macaques. BioRxiv. 10.1101/811992 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Su Y, Routhu S, Moon KS, Lee SQ, Youm WS, & Ozturk Y (2016). A wireless 32-channel implantable bidirectional brain machine interface. Sensors (Switzerland), 16(10), 1–18. 10.3390/s16101582 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Truppa V, Garofoli D, Castorina G, Mortari EP, Natale F, & Visalberghi E (2010). Identity concept learning in matching-to-sample tasks by tufted capuchin monkeys (Cebus apella). Animal Cognition, 13(6), 835–848. 10.1007/s10071-010-0332-y [DOI] [PubMed] [Google Scholar]
- Tulip J, Zimmermann JB, Farningham D, & Jackson A (2017). An automated system for positive reinforcement training of group-housed macaque monkeys at breeding and research facilities. Journal of Neuroscience Methods, 285, 6–18. 10.1016/j.jneumeth.2017.04.015 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Washburn DA, & Rumbaugh DM (1992). Testing primates with joystick-based automated apparatus: Lessons from the Language Research Center’s Computerized Test System. Behavior Research Methods, Instruments, & Computers, 24(2), 157–164. 10.3758/BF03203490 [DOI] [PubMed] [Google Scholar]
- Weed MR, Taffe MA, Polis I, Roberts AC, Robbins TW, Koob GF, Bloom FE, & Gold LH (1999). Performance norms for a rhesus monkey neuropsychological testing battery: Acquisition and long-term performance. Cognitive Brain Research, 8(3), 185–201. 10.1016/S0926-6410(99)00020-8 [DOI] [PubMed] [Google Scholar]
- Yazdan-Shahmorad A, Diaz-Botia C, Hanson TL, Kharazia V, Ledochowitsch P, Maharbiz MM, & Sabes PN (2016). A Large-Scale Interface for Optogenetic Stimulation and Recording in Nonhuman Primates. Neuron, 89(5), 927–939. 10.1016/j.neuron.2016.01.013 [DOI] [PubMed] [Google Scholar]
- Yazdan-Shahmorad A, Silversmith DB, Kharazia V, & Sabes PN (2018). Targeted cortical reorganization using optogenetics in non-human primates. ELife, 7, 1–21. 10.7554/eLife.31034 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Yin M, Borton DA, Komar J, Agha N, Lu Y, Li H, Laurens J, Lang Y, Li Q, Bull C, Larson L, Rosler D, Bezard E, Courtine G, & Nurmikko AV (2014). Wireless Neurosensor for Full-Spectrum Electrophysiology Recordings during Free Behavior. Neuron, 84(6), 1170–1182. 10.1016/j.neuron.2014.11.010 [DOI] [PubMed] [Google Scholar]
- Zanos S, Richardson AG, Shupe L, Miles FP, & Fetz EE (2011). The Neurochip-2: An Autonomous Head-Fixed Computer for Recording and Stimulating in Freely Behaving Monkeys. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 19(4), 427–435. 10.1109/TNSRE.2011.2158007 [DOI] [PMC free article] [PubMed] [Google Scholar]