

Abstract
Maximum a posteriori estimation (MAP) with Dirichlet prior has been shown to be effective in improving the parameter learning of Bayesian networks when the available data are insufficient. Given no extra domain knowledge, uniform prior is often considered for regularization. However, when the underlying parameter distribution is non-uniform or skewed, uniform prior does not work well, and a more informative prior is required. In reality, unless the domain experts are extremely unfamiliar with the network, they would be able to provide some reliable knowledge on the studied network. With that knowledge, we can automatically refine informative priors and select reasonable equivalent sample size (ESS). In this paper, considering the parameter constraints that are transformed from the domain knowledge, we propose a Constrained adjusted Maximum a Posteriori (CaMAP) estimation method, which is featured by two novel techniques. First, to draw an informative prior distribution (or prior shape), we present a novel sampling method that can construct the prior distribution from the constraints. Then, to find the optimal ESS (or prior strength), we derive constraints on the ESS from the parameter constraints and select the optimal ESS by cross-validation. Numerical experiments show that the proposed method is superior to other learning algorithms.
Keywords: graphical models, domain knowledge, prior distribution, equivalent sample size, parameter constraints
1. Introduction
A Bayesian network (BN) is a type of graphical model that combines probability and causality theory. A BN becomes a causal model that enables reasoning about intervention under a desired causal assumption [1,2,3]. BNs have been shown to be powerful tools for addressing statistical prediction and classification problems, and they have been widely applied in many fields, such as geological hazard prediction [4], reliability analysis [5,6], medical diagnosis [7,8], gene analysis [9], fault diagnosis [10], and language recognition [11]. A BN includes two components: a graph structure and a set of parameters . The structure is a Directed Acyclic Graph (DAG) that consists of nodes (also called vertices) representing random variables,, where n is the number of variables, and directed edges (also called arcs) correspond to the conditional dependence relationships among the variables. Notice that there should be no directed cycles in the graph. When sufficient data are available, the parameters of BN can be precisely and efficiently learnt by statistical approaches such as Maximum Likelihood (ML) estimation. When the sample data set is small, ML estimation often overfits the data and fails to approximate the underlying parameter distribution. To address this problem, Maximum a Posteriori (MAP) estimation has been introduced and shown to be effective in improving parameter learning. Because of the useful properties, i.e., (I) hyper-parameters of the BN model can be taken as equivalent sample observations and (II) experts find it convenient to define the uniformity of the distribution, the Dirichlet distribution is often preferred for the discrete BN model and therefore added into the estimating process. For the sake of clarity, we define the MAP parameter estimation of node as . is the number of observations in the data set where node has the kth state and its set of parents has the jth state of its configurations. is the sum of over all k. and are the equivalent numbers of and in prior beliefs. For all , is also the hyper-parameter values of the Dirichlet prior distribution of the BN parameter , and is also the prior strength or equivalent sample size (ESS).
Given no extra domain knowledge, a uniform prior or flat prior is often chosen among all the candidate Dirichlet priors. Based on the uniform prior, MAP scores, such as Bayesian Dirichlet uniform (BDu) [12], Bayesian Dirichlet equivalent uniform (BDeu) [13] and Bayesian Dirichlet sparse (BDs) [14] have been developed and investigated [15,16,17,18,19]. When the underlying parameter distribution is uniform, (I) if the distribution obtained by purely data-driven estimation for the parameter is also uniform, the selection of ESS has minor effects on MAP estimation and (II) if the distribution obtained by purely data-driven estimation for the parameter is non-uniform, the ESS becomes crucial and the MAP estimation only approximates the underlying distribution by a large ESS value. However, when the underlying parameter distribution is non-uniform, the uniform prior becomes non-informative and, no matter what size the ESS value is, the MAP estimation based on the uniform prior fails to approximate the underlying distribution. Therefore, a well-defined or informative prior is significant.
In practice, unless the domain experts are totally unfamiliar with the studied problem, they would be able to provide some prior information about the underlying parameters [20,21], e.g., parameter A is very likely to be larger than 0.6, or parameter A is larger than B. In this paper, we assume that the expert opinion or domain knowledge is trustworthy, i.e., the domain knowledge would not be incorporated into the parameter estimation unless the domain experts are confident about their opinions. In fact, this is the assumption that many existing parameter estimation algorithms rely on [22,23,24,25,26]. From the reliable domain knowledge, we can refine informative priors. Then, with an informative prior, we can further select a reasonable ESS. In view of the above considerations, we conclude that, to obtain accurate MAP estimation, informative prior distribution is required to represent the given domain knowledge and thereby select the reasonable ESS to balance the impact of data and prior. Based on such an idea, in this paper, we present a Constrained adjusted Maximum a Posteriori (CaMAP) estimation approach to learn the parameter of a discrete BN model.
This paper is organized as follows. Section 2 briefly introduces related concepts and the studied problem. Section 3 focuses on the illustration of a novel prior elicitation algorithm and a novel optimal ESS selection algorithm. Section 4 presents the experimental results of the proposed method. Finally, we summarize the main findings of the paper and briefly explore the directions for future research in Section 5.
2. The Background
2.1. Bayesian Network
A BN is a probabilistic graphical model representing a set of variables and their conditional dependencies via a DAG. Learning a BN includes two parts: structure learning and parameter learning. Structure learning consists of finding the optimal DAG G that identifies the dependencies between variables from the observational data. Parameter learning entails estimating the optimal parameters that quantitatively specify the conditional dependencies between variables. Given the structure, the parameter estimation of a network can be factorized into the independent parameter estimations of individual variables, which means:
| (1) |
where is the likelihood function of parameters given observational data , and the ML estimation of parameter is
| (2) |
where .
When the observed data are sufficient, the ML estimation often fits the underlying distributions well. However, when the data are insufficient, additional information such as domain knowledge is required to prevent over-fitting.
2.2. Parameter Constraints
Domain knowledge can be transformed into qualitative parameter constraints. In practice, there are three common parameter constraints [22,27], which are all convex (i.e., the constraints form a convex constrained parameter feasible set that is easy to compute its geometric center, see Section 3.1). The constraints are:
(1) Range constraint: This constraint defines the upper and lower bounds of a parameter, and it is commonly considered in practice.
| (3) |
(2) Intra-distribution constraint: This constraint describes the comparative relationship between two parameters that refer to the same parent configuration state but different child node states.
| (4) |
(3) Cross-distribution constraint: This constraint has also been called “order constraint” [23] or “monotonic influence constraint” [24]. It defines the comparative relationship between two parameters that share the same child node state but different parent configuration node states.
| (5) |
The third type of constraints might be hard to understand. As an example, smoking (S = 1) and polluted air (PA = 1) are two causes of lung cancer (LC = 1) and medical experts agree that smoking is more likely to cause lung cancer. Then, the medical knowledge could be expressed as a cross-distribution constraint, P(C = 1|S = 1, PA = 0) > P(C = 1|S = 0, PA = 1).
2.3. Problem Formulation
With observational data and domain knowledge, the parameter learning problem of a discrete BN can be formally defined as:
Input:
: Number of nodes in the network.
: Structure with unknown parameters.
: Set of complete observations for variables.
: Set of parameter constraints transformed from reliable domain knowledge, , where denotes all the constraints on node .
Task: Find the optimal parameters that approximate the underlying parameter distribution, , , . Here, is the number of configuration state values of the parents of the variable and is the number of state values of the variable .
2.4. Sample Complexity of BN Parameter Learning
Basically, the ML estimation method learns accurate parameters when the acquired data are sufficient. However, when the data are insufficient, ML estimation is often inaccurate. Thus, definition of sample complexity for BN parameter learning helps to determine whether ML meets the accuracy requirement. With regard to this problem, Dasgupta [28] defined the lower bound of the sample size for BN parameters learning with known structures. Given that a network has binary variables, and no node has more than parents, then the sample complexity with confidence is lower bounded by
| (6) |
where is the error rate and is often computed as , for a small constant .
3. The Method
Among all the parameter learning algorithms, MAP estimation is a learning algorithm that conveniently combines the prior knowledge and observed data. For node , the posteriori estimation of parameters can be written as
| (7) |
where denotes the prior distribution and equals to . Thus, the MAP estimation of can be further defined as:
| (8) |
Since the parameters studied in this paper follows the multinomial distribution and the conjugate prior for the multinomial distribution is Dirichlet distribution, the prior distribution of is set to be the Dirichlet distribution, i.e., , where are the priors equivalent to the observations . As a result, the approximate MAP estimation (see Appendix A) for has the form
| (9) |
where is the equivalent (or hypothetical) sample size.
Generally, domain experts would find it difficult to provide a specific prior Dirichlet distribution but feel more comfortable to make qualitative statements on unknown parameters. From such qualitative parameter statements or parameter constraints, the prior distribution can be further defined as
| (10) |
where is the prior hyper-parameter vector of the prior distribution that represents the domain knowledge and can be sampled from the parameter constraints. Finally, the MAP estimation for can be expressed as
| (11) |
As the parameter constraints are incorporated into the MAP estimation, we define the above estimation as Constrained adjusted Maximum a Posteriori (CaMAP) estimation. In the following sections, we will introduce the elicitation of the prior parameter and the selection of the optimal ESS .
3.1. Prior Elicitation
Before defining the optimal ESS , the prior parameter is required, which could be elicited from the parameter constraints in a sampling manner. In this paper, we design a sampling method that applies to all types of convex constraints. Specifically, in the sampling method,
(1) First, we search for the optimal parameters of the following model:
| (12) |
| (13) |
where is a random constant and represents all the parameter constraints on node . The constrained model is simple and could be efficiently solved. Note that even though the objective function is a constant, the solutions of the constrained model could vary each time. In fact, any parameters satisfying the given parameter constraints are solutions of the constrained model. Therefore, through iteratively solving the constrained model, we collect the parameters that cover the feasible parameter region constrained by the parameter constraints.
(2) Then, the first step is repeated (In this paper, we set the repetition times at 100 and the sampling code is available at: https://uk.mathworks.com/matlabcentral/fileexchange/34208-uniform-distribution-over-a-convex-polytope (accessed on 26 September 2021)) to collect sufficient sampled parameters that cover the constrained parameter space. To make sure that the sampled parameters are uniformly distributed over the constrained parameter space, for each sampling step, we add an extra constraint
| (14) |
where is a small value (e.g., 0.1), represents the sampled parameters at step , and represents the sampled parameters at step .
(3) Finally, we average over all the sampled parameters and set the mean values as the prior , , where .
3.2. ESS Value Selection
Although the sampled prior guarantees satisfying all the parameter constraints, the overall estimation (Equation (10)) may violate the constraints if ESS is not reasonably defined. For example, for binary variables, { = Lung Cancer, = Smoking, Pollution Air}, smoking and pollution air are shown to cause lung cancer. Parameter represents the probability that the value of variable is true given that the values of variables and are both true. In this example, is the probability of having lung cancer () given that the patients consistently smoke () and work in polluted air (). The medical experts assert that lies in the interval, [0.6, 1.0], which is also the parameter constraint. Now, the elicited prior is 0.80, which satisfies the parameter constraint, and the purely data-driven estimation (also ML estimation) is . Then, with a small ESS, such as 5, the estimation (Equation (11)) is computed as follows:
| (15) |
Obviously, the above estimation does not satisfy the constraint, . In fact, to make sure that the estimation does not violate the constraint, the optimal ESS should not be less than 16, which could be inferred from the parameter constraints. Therefore, given the elicited prior and observation counting, to guarantee that the overall CaMAP estimation satisfies all the parameter constraints, the optimal ESS should satisfy certain constraints.
From each type of constraint imposed on the parameters, ESS constraints could be derived as follows:
(1) To satisfy the range constraint, the CaMAP estimation in Equation (11) should satisfy
| (16) |
which implies
| (17) |
| (18) |
(2) To satisfy the intra-distribution constraint, the CaMAP estimation should satisfy
| (19) |
which implies
| (20) |
(3) To satisfy the cross-distribution constraint, the CaMAP estimation should satisfy
| (21) |
where and represent the ESS values of the distributions under the cross-distribution constraint. Thus, we have
| (22) |
In this paper, we set and thus we have
| (23) |
From the above inequality, constraints on the ESS values and could be derived.
Furthermore, in this paper, for each node, we define two classes of ESSs: “global” and “local” ESS. “Global” ESS refers to the equivalent sample size imposed on all parameter distributions of the given node, such as node , while “local” ESS refers to the equivalent sample size working on parameter distribution that refers to a specific parent configuration state. For example, in Figure 1, for node , is the “global” ESS, while are the “local” ESSs.
Figure 1.

Illustration of “global” and “local” ESS.
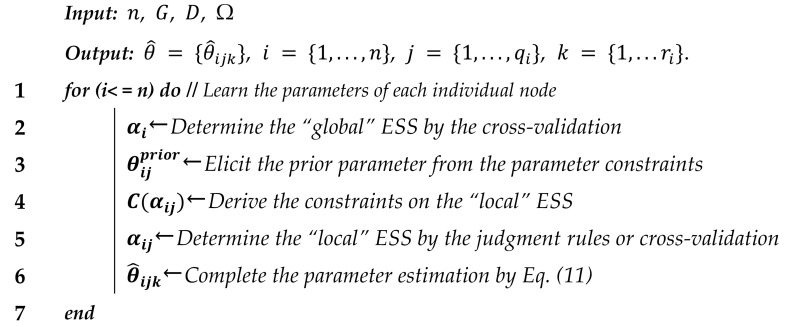
In general, with the elicited prior, observational data and parameter constraints, for node , the optimal ESSs could be determined by the following procedure:
(1) First, from the elicited prior and observational data, the optimal “global” ESS αi could be determined by cross-validation [29]. In the cross-validation, each candidate ESS (In this paper, the candidate ESS varies from 1 to 50) is evaluated based on the likelihood of posteriori estimation in Equation (11).
(2) Then, based on the parameter constraints, we can derive the constraints on each “local” ESS .
(3) Finally, for “local” ESS , (I) If there is no constraint imposed on , then we set . (II) If there are constraints imposed on and meanwhile the “global” ESS satisfies the constraints, then, we set ; if not, is determined by further cross-validation using data, prior and ESS constraints. Note that in the process of validation, the initial candidate ESS value of is set to be the lower bound value of the range defined by its constraints.
The pseudo-code of the proposed CaMAP algorithm could be summarized as following Algorithm 1:
| Algorithm 1 Constrained adjusted Maximum a Posteriori (CaMAP) algorithm |
 |
3.3. Numerical Illustration of CaMAP Method
To illustrate the principle of the proposed method, we demonstrate the parameter learning of the BN shown in Figure 2, which is extracted from the brain tumor BN [23]. Nodes in the network have meanings as below. Specifically, the network indicates that the presence of brain tumor and the increased level of serum calcium may cause coma.
Figure 2.

Brain tumor BN.
C → Coma
BT → Brain Tumour
IS → Increased level of Serum calcium
(1) First, we assume that a small data set of 20 patients is available. From the data, the following counting are observed:
Furthermore, we acquire the following medical knowledge from the medical experts: a brain tumor as well as an increased level of serum calcium are likely to cause the patient to fall into a coma in due course. From this medical knowledge, we generate the following parameter constraints:
(2) Then, based on the parameter constraints, we elicit the following priors using the proposed prior elicitation algorithm (Section 3.1):
(3) Furthermore, from the parameter constraints, we derive the constraints on the “local” ESSs:
(4) Next, for node , the optimal “global” ESS is cross-validated to be 3. As the “global” ESS does not satisfy any of the ESS constraints, the “local” ESSs would not be equal to the “global” ESS and should be further validated. Based on the prior, data and ESS constraints, the optimal “local” ESSs are cross-validated to be as follows:
(5) Finally, with the elicited priors and optimal ESSs, the CaMAP estimation are computed as follows:
4. The Experiments
We conducted experiments to investigate the performance of the proposed CaMAP method in terms of learning accuracy, under different sample sizes and constraint sizes. In the experiments, we used the networks from [16,17], shown in Figure 3, Figure 4, Figure 5, Figure 6 and Figure 7. The true parameter distributions in these networks show different uniformities, varying from strongly skewed to strongly uniform distributions. As the true parameters were set or known in advance, the learnt parameters were evaluated by the Kullback–Leibler (KL) divergence [30], which indicates the divergence between the learnt parameters or estimated distribution and the true parameters or underlying distribution. The proposed method was evaluated against the following learning algorithms: ME [31], ML [32], MAP [13], CME [26,33], and CML [24,34] (The code of all the six tested algorithms can be found at https://github.com/ZHIGAO-GUO/CaMAP (accessed on 26 September 2021)). The full names of the tested algorithms are listed as follows:
Figure 3.

Strongly skewed distribution.
Figure 4.

Skewed distribution.
Figure 5.

Uniform distribution.
Figure 6.

Strongly uniform distribution.
Figure 7.

Combined skewed and uniform distribution.
Notice that, (I) in the MAP method, we used a uniform (or flat) prior, which means, in Equation (11) was set to be and ESS value is 1, and (II) in the CaMAP method, we set the maximum candidate ESS to be 50, which is a sufficient number for all networks.
4.1. Learning with Different Sample Sizes
First, we examined the learning performance of all algorithms under different sample sizes. Our experiments were carried out under the following settings: (1) The sample sizes were set to be 10, 20, 30, 40, and 50, respectively. (2) The parameter constraints were randomly generated from the true parameters of the tested networks, with the maximum number of constraints for each node at 3. Specifically, the parameter constraints are generated using the following rules: (1) Range constraints are generated as , where is equal to be and is equal to be , where represents the true parameter, and and are two random values around 0.2. (2) Inequality constraints are generated as if . Therefore, when and , the constraint becomes the intra-distribution constraint, while the constraint becomes the cross-distribution constraint when and ,.
We performed 100 repeated experiments. The average KL divergence values of different algorithms on different networks under different sample sizes are summarized in Table 1 with the best results highlighted in bold.
Table 1.
Parameter learning under different sample sizes.
| ML | CML | ME | CME | MAP | CaMAP | |
|---|---|---|---|---|---|---|
| (a) Network—strongly skewed distribution | ||||||
| 10 | 2.455 | 0.946 | 0.196 | 0.098 | 0.083 | 0.108 |
| 20 | 1.234 | 0.486 | 0.131 | 0.075 | 0.066 | 0.063 |
| 30 | 0.486 | 0.211 | 0.070 | 0.046 | 0.050 | 0.038 |
| 40 | 0.291 | 0.147 | 0.053 | 0.036 | 0.040 | 0.029 |
| 50 | 0.192 | 0.098 | 0.044 | 0.033 | 0.034 | 0.024 |
| (b) Network—skewed distribution | ||||||
| 10 | 2.277 | 0.884 | 0.182 | 0.090 | 0.077 | 0.104 |
| 20 | 1.170 | 0.481 | 0.122 | 0.068 | 0.062 | 0.064 |
| 30 | 0.589 | 0.257 | 0.085 | 0.055 | 0.055 | 0.042 |
| 40 | 0.302 | 0.139 | 0.060 | 0.042 | 0.046 | 0.030 |
| 50 | 0.154 | 0.066 | 0.044 | 0.034 | 0.037 | 0.025 |
| (c) Network—uniform distribution | ||||||
| 10 | 2.350 | 1.060 | 0.195 | 0.095 | 0.072 | 0.103 |
| 20 | 1.036 | 0.452 | 0.118 | 0.070 | 0.066 | 0.069 |
| 30 | 0.515 | 0.229 | 0.080 | 0.053 | 0.060 | 0.049 |
| 40 | 0.238 | 0.101 | 0.053 | 0.039 | 0.044 | 0.029 |
| 50 | 0.150 | 0.069 | 0.040 | 0.030 | 0.037 | 0.023 |
| (d) Network—strongly uniform distribution | ||||||
| 10 | 2.102 | 0.899 | 0.182 | 0.091 | 0.070 | 0.105 |
| 20 | 1.202 | 0.528 | 0.122 | 0.064 | 0.063 | 0.060 |
| 30 | 0.470 | 0.214 | 0.075 | 0.047 | 0.054 | 0.040 |
| 40 | 0.353 | 0.151 | 0.062 | 0.041 | 0.045 | 0.030 |
| 50 | 0.186 | 0.057 | 0.043 | 0.031 | 0.034 | 0.021 |
| (e) Network—combined skewed and uniform distribution | ||||||
| 10 | 2.460 | 1.015 | 0.201 | 0.097 | 0.074 | 0.102 |
| 20 | 1.103 | 0.433 | 0.121 | 0.069 | 0.066 | 0.058 |
| 30 | 0.631 | 0.228 | 0.089 | 0.055 | 0.053 | 0.042 |
| 40 | 0.290 | 0.126 | 0.061 | 0.043 | 0.047 | 0.028 |
| 50 | 0.206 | 0.097 | 0.051 | 0.038 | 0.039 | 0.025 |
From the experimental results, we draw the following conclusions: (1) With increasing data, the performance of all algorithms improved by different levels. (2) In almost all cases, CaMAP outperformed the other learning algorithms. However, when the available data are extremely insufficient, e.g., 10, the CaMAP was inferior to the MAP method. The explanation might be that the insufficiency of data impacts the cross-validation of ESS values. Therefore, the optimal ESS turns out to be extreme, either small or large, and fails to balance data and prior (see the 2nd future study in Discussion and Conclusions section).
4.2. Learning with Different Constraint Sizes
Next, we further explored the learning performance of different learning algorithms under different constraint sizes. The experiments were conducted under the following settings: (1) The data set size for all the tested networks was set to be 20, which is a small number for all networks. (2) Parameter constraints were generated from the true parameters of the networks and the maximum number of constraints for each node was set to be 3. The parameters were learnt from a fixed data set but an increasing number of parameter constraints that were randomly chosen from all generated constraints. The constraint sparsity varied from 0% to 100%. For each setting, we performed 100 repeated experiments. The average KL divergence values of different algorithms on different networks under different constraint sizes are summarized in Table 2.
Table 2.
Parameter learning under different constraint sizes.
| ML | CML | ME | CME | MAP | CaMAP | |
|---|---|---|---|---|---|---|
| (a) Network—strongly skewed distribution | ||||||
| 0% | 1.321 | 1.023 | 0.133 | 0.097 | 0.080 | 0.082 |
| 25% | 1.321 | 0.691 | 0.133 | 0.092 | 0.080 | 0.057 |
| 50% | 1.321 | 0.382 | 0.133 | 0.083 | 0.080 | 0.045 |
| 75% | 1.321 | 0.168 | 0.133 | 0.069 | 0.080 | 0.022 |
| 100% | 1.321 | 0.063 | 0.133 | 0.055 | 0.080 | 0.005 |
| (b) Network—skewed distribution | ||||||
| 0% | 1.313 | 1.003 | 0.131 | 0.093 | 0.077 | 0.080 |
| 25% | 1.313 | 0.554 | 0.131 | 0.090 | 0.077 | 0.052 |
| 50% | 1.313 | 0.345 | 0.131 | 0.082 | 0.077 | 0.041 |
| 75% | 1.313 | 0.098 | 0.131 | 0.072 | 0.077 | 0.017 |
| 100% | 1.313 | 0.065 | 0.131 | 0.054 | 0.077 | 0.005 |
| (c) Network—uniform distribution | ||||||
| 0% | 1.184 | 0.925 | 0.127 | 0.094 | 0.073 | 0.075 |
| 25% | 1.184 | 0.505 | 0.127 | 0.091 | 0.073 | 0.052 |
| 50% | 1.184 | 0.241 | 0.127 | 0.083 | 0.073 | 0.037 |
| 75% | 1.184 | 0.118 | 0.127 | 0.071 | 0.073 | 0.017 |
| 100% | 1.184 | 0.058 | 0.127 | 0.055 | 0.073 | 0.007 |
| (d) Network—strongly uniform distribution | ||||||
| 0% | 1.303 | 0.999 | 0.126 | 0.093 | 0.072 | 0.073 |
| 25% | 1.303 | 0.724 | 0.126 | 0.089 | 0.072 | 0.052 |
| 50% | 1.303 | 0.474 | 0.126 | 0.078 | 0.072 | 0.039 |
| 75% | 1.303 | 0.196 | 0.126 | 0.067 | 0.072 | 0.023 |
| 100% | 1.303 | 0.072 | 0.126 | 0.049 | 0.072 | 0.007 |
| (e) Network—combined skewed and uniform distribution | ||||||
| 0% | 1.170 | 0.900 | 0.121 | 0.088 | 0.076 | 0.080 |
| 25% | 1.170 | 0.512 | 0.121 | 0.084 | 0.076 | 0.050 |
| 50% | 1.170 | 0.296 | 0.121 | 0.077 | 0.076 | 0.025 |
| 75% | 1.170 | 0.153 | 0.121 | 0.068 | 0.076 | 0.014 |
| 100% | 1.170 | 0.050 | 0.121 | 0.050 | 0.076 | 0.005 |
From the experimental results, we draw the following conclusions: (1) For the algorithms that did not use constraints, such as ML, ME, and MAP, changing the constraint size did not impact their performance. However, for the algorithms that have been incorporated constraints, such as CML, CME, and CaMAP, an increase in constraints affected their performances to a certain degree depending on the number of incorporated constraints. (2) In most cases, CaMAP outperformed the other parameter learning algorithms, except for MAP, when no parameter constraints were incorporated into the learning. In fact, when no parameter constraints were available, CaMAP method was slightly inferior to the MAP estimation with uniform prior. The explanation might be as follows: when the parameter constraints are not available, constraints on ESS values could not be deduced. Therefore, ESS values in CaMAP estimation are the same at those in MAP estimation. Then, the difference between the CaMAP and MAP estimation lies in the prior, . However, unlike uniform prior in MAP estimation, prior in the CaMAP method is elicited using a sampling method. For the sampling methods, it is hard to achieve completely uniform sampling unless the sampling size is very large (see the 1st future study in the Discussion and Conclusions section).
5. Discussion and Conclusions
For MAP estimation in BN parameter learning, informative prior distribution and reasonable ESS values are two crucial factors that impact the learning performance. Empirically, a uniform prior is preferred and ESS is further cross-validated according to the uniform prior. However, when the underlying parameter distribution is non-uniform or skewed, MAP estimation with a uniform prior does not fit the underling parameter distribution well, and, in that case, an informative prior is required. In fact, reliable qualitative domain knowledge has been proved to be useful and can be used for eliciting informative priors and selecting the reasonable ESS. In this paper, we proposed a CaMAP estimation method. The proposed method automatically elicits the prior distribution from the parameter constraints that are transformed from the domain knowledge. Besides, constraints on ESS values are derived from the parameter constraints. Then, the optimal ESS, including “global” and “local” ESS, are further chosen from the ranges derived from the ESS constraints by cross-validation. Our experiments demonstrated that the proposed method outperformed most of the mainstream parameter learning algorithms. In future study:
(1) A more effective prior elicitation approach is desired. Compared to the sampling-based methods, geometric constraint-solving methods would be more robust and could elicit more informative priors.
(2) A more reasonable ESS selection method is preferred. For the cross-validation method, when the available data are extremely insufficient or less informative, the optimal ESS tends to maximize the likelihood of data and makes the CaMAP estimation fail to approach the underling parameter distribution. In fact, data bootstrapping guided by the parameter constraints may extend the data and make the data more informative and thus improve the ESS selection.
Appendix A
The approximate MAP estimation for has the form
Proof.
The posterior estimation of parameter , where and is the number of states of node i, is
(24) where is the prior and is the likelihood. Thus, the maximum a posteriori estimation of is
As it is more convenient to deal log, the MAP estimation of can be expressed as
Since the parameters studied in this paper follows the multinomial distribution and the conjugate prior for the multinomial distribution is Dirichlet distribution. The above equation could be further written as
where is the prior distribution. Then, the maximum a posteriori estimation of is
However, the above estimation only holds for and it is only one choice of point estimation since the true is unknown. Instead of exact MAP estimation, the approximate estimation
holds for any choice of prior. Therefore, in this paper, we adopt the above approximate estimation. □
Author Contributions
Conceptualization, R.D. and C.H.; methodology, R.D.; formal investigation, C.H.; writing—original draft preparation, R.D.; writing—review and editing, R.D., P.W.; supervision, Z.G.; funding acquisition, R.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Key Laboratory fund and Nature Science Foundation of Shanxi, the grant numbers are CEMEE2020Z0202B, 2020JQ-816,20JK0608.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data used in the experiments are synthetically generated from the networks (refer to Figure 3, Figure 4, Figure 5, Figure 6 and Figure 7) and could be generated by the open-source code provided in the paper.
Conflicts of Interest
The authors declare no conflict of interest.
Footnotes
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
References
- 1.Pearl J. Probabilistic Reasoning in Intelligent Systems. Morgan Kaufmann Publishers; San Francisco, CA, USA: 1988. [Google Scholar]
- 2.Koller D., Friedman N. Probabilistic Graphical Models. MIT Press; Cambridge, MA, USA: 2009. [Google Scholar]
- 3.Cowell R., Dawid A., Lauritzen S., Spiegelhalter D. Probabilistic Networks and Expert Systems. Springer; Barcelona, Spain: 1999. [Google Scholar]
- 4.Hincks T., Aspinall W., Cooke R., Gernon T. Oklahoma’s induced seismicity strongly linked to wastewater injection depth. Science. 2018;359:7911–7924. doi: 10.1126/science.aap7911. [DOI] [PubMed] [Google Scholar]
- 5.Xing P., Zuo D., Zhang W., Hu L., Wang H., Jiang J. Research on human error risk evaluation using extended Bayesian networks with hybrid data. Reliab. Eng. Syst. Saf. 2021;209:107336. [Google Scholar]
- 6.Sun B., Li Y., Wang Z., Yang D., Ren Y., Feng Q. A combined physics of failure and Bayesian network reliability analysis method for complex electronic systems. Process Saf. Environ. Prot. 2021;148:698–710. doi: 10.1016/j.psep.2021.01.023. [DOI] [Google Scholar]
- 7.Yu K., Liu L., Ding W., Le T. Multi-source causal feature selection. IEEE Trans. Pattern Anal. Mach. Learn. 2020;42:2240–2256. doi: 10.1109/TPAMI.2019.2908373. [DOI] [PubMed] [Google Scholar]
- 8.McLachlan S., Dube K., Hitman G., Fenton N., Kyrimi E. Bayesian networks in healthcare: Distribution by medical condition. Artif. Intell. Med. 2020;107:101912. doi: 10.1016/j.artmed.2020.101912. [DOI] [PubMed] [Google Scholar]
- 9.Lax S., Sangwan N., Smith D., Larsen P., Handley K.M., Richardson M., Guyton K., Krezalek M., Shogan B.D., Defazio J., et al. Bacterial colonization and succession in a newly opened hospital. Sci. Transl. Med. 2017;9:6500–6513. doi: 10.1126/scitranslmed.aah6500. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 10.Wang Z., Wang Z., He S., Gu X., Yan Z. Fault detection and diagnosis of chillers using Bayesian network merged distance rejection and multi-source non-sensor information. Appl. Energy. 2017;188:200–214. doi: 10.1016/j.apenergy.2016.11.130. [DOI] [Google Scholar]
- 11.Xiao Q., Qin M., Guo P., Zhao Y. Multimodal fusion based on LSTM and a couple conditional hidden markov model for chinese sign language recognition. IEEE Access. 2019;7:112258–112268. doi: 10.1109/ACCESS.2019.2925654. [DOI] [Google Scholar]
- 12.Heckerman D., Geiger D., Chickering D. Learning bayesian networks: The combination of knowledge and statistical data. Mach. Learn. 1995;87:197–243. doi: 10.1007/BF00994016. [DOI] [Google Scholar]
- 13.Buntine W. Theory refinement onbayesian neworks; Proceedings of the 7th Conference on Uncertainty in Artificial Intelligence; Los Angeles, CA, USA. 13–15 July 1991; pp. 52–60. [Google Scholar]
- 14.Scutari M. An empirical-bayes score fordiscrete bayesian networks; Proceedings of the 8th International Conference on Probabilistic Graphical Models; Lugano, Switzerland. 6–9 September 2016; pp. 438–449. [Google Scholar]
- 15.Steck H., Jaakkola T. On the dirichlet prior and bayesian regulation; Proceedings of the 15th International Conference on Neural Information Processing Systems; Vancouver, BC, Canada. 9–14 December 2002; pp. 697–704. [Google Scholar]
- 16.Ueno M. Learning networks determinedby the ratio of prior and data; Proceedings of the 26th International Conference on Uncertainty in Artificial Iteligence; Catalina Island, CA, USA. 8–11 July 2010; pp. 598–605. [Google Scholar]
- 17.Ueno M. Robust learning bayesian networks for prior belief; Proceedings of the 27th International Conference on Uncertainty in Artificial Intelligence; Barcelona, Spain. 14–17 July 2011; pp. 698–707. [Google Scholar]
- 18.Silander T., Kontkanen P., Myllymaki P. On sensitivity of the map bayesian network structure to the equivalent sample size parameter; Proceedings of the 23rd International Conference on Uncertainty in Artificial Intelligence; Vancouver, BC, Canada. 19–22 July 2007; pp. 360–367. [Google Scholar]
- 19.Cano A., Gomez-Olmedo M., Masegosa A., Moral S. Locally averaged bayesian dirichlet metrics for learning the structure and the parameters of bayesian networks. Int. J. Approx. Reason. 2013;54:526–540. doi: 10.1016/j.ijar.2012.09.003. [DOI] [Google Scholar]
- 20.Druzdzel M., Gaag L. Elicitation of probabilities forbelief networks: Combining qualitative and quantitative information; Proceedings of the 11th International Conference on Uncertainty in Artificial Intelligence; Montreal, QC, Canada. 18–20 August 1995; pp. 141–148. [Google Scholar]
- 21.Gaag L., Witteman C., Aleman B., Taal B. How to elicit many probabilities; Proceedings of the 23rd International Conference on Uncertainty in Artificial Intelligence; Stockholm, Sweden. 30 July–1 August 1999; pp. 647–654. [Google Scholar]
- 22.Niculescu R., Mitchell T., Rao R.B. Bayesian network learning with parameter constraints. J. Mach. Learn. Res. 2006;7:1357–1383. [Google Scholar]
- 23.Feelders A., Gaag L. Learning bayesian networks parameters under order constraints. Int. J. Approx. Reason. 2006;42:37–53. doi: 10.1016/j.ijar.2005.10.003. [DOI] [Google Scholar]
- 24.Zhou Y., Fenton N., Zhu C. An empirical study of bayesian network parameterlearning with monotonic influence constraints. Decis. Support Syst. 2016;87:69–79. doi: 10.1016/j.dss.2016.05.001. [DOI] [Google Scholar]
- 25.Guo Z., Gao X., Ren H., Yang Y., Di R., Chen D. Learning Bayesian network parameters from small data sets: A further constrained qualitatively maximum a posteriori method. Int. J. Approx. Reason. 2017;91:22–35. doi: 10.1016/j.ijar.2017.08.009. [DOI] [Google Scholar]
- 26.Campos C., Qiang J. Improving bayesian network parameter learning using constraints; Proceedings of the 19th International Conference on Pattern Recognition; Tampa, FL, USA. 8–11 December 2008; pp. 1–4. [Google Scholar]
- 27.Wellman M. Fundamental concepts of qualitative probabilistic networks. Artif. Intell. 1990;44:257–303. doi: 10.1016/0004-3702(90)90026-V. [DOI] [Google Scholar]
- 28.Dasgupta S. The sample complexity of learning fixed structure Bayesian networks; Proceedings of the 14th International Conference on Machine Learning; Nashville, TN, USA. 8–12 July 1997; pp. 165–180. [Google Scholar]
- 29.Kohavi R. A study of cross-validation andbootstrap for accuracy estimation and model selection; Proceedings of the 7th International Conference on Uncertainty in Artificial Intelligence; Montreal, QC, Canada. 18–20 August 1995; pp. 1137–1143. [Google Scholar]
- 30.Kullback S., Leibler R. On information and sufficiency. Ann. Math. Stat. 1951;22:79–86. doi: 10.1214/aoms/1177729694. [DOI] [Google Scholar]
- 31.Harremoes P., Topsoe F. Maximum entropy fundamentals. Entropy. 2001;3:191–226. doi: 10.3390/e3030191. [DOI] [Google Scholar]
- 32.Redner R., Walker H. Mixture densities, maximum likelihood and theem algorithm. SIAM Rev. 1984;26:195–239. doi: 10.1137/1026034. [DOI] [Google Scholar]
- 33.Campos C., Qiang J. Bayesian networks and the imprecise dirichlet model applied to recognition problems; Proceedings of the 11th European conference on Symbolic and Quantitative Approaches to Reasoning with Uncertainty; Belfast, UK. 29 June–1 July 2011; Tampa, FL, USA: Springer; 2011. pp. 158–169. [Google Scholar]
- 34.Campos C., Tong Y., Qiang J. Constrained maximum likelihood learning of bayesian networks for facial action recognition; Proceedings of the 10th European Conference on Computer Vision; Marseille, France. 12–18 October 2008; pp. 168–181. [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.
Data Availability Statement
Data used in the experiments are synthetically generated from the networks (refer to Figure 3, Figure 4, Figure 5, Figure 6 and Figure 7) and could be generated by the open-source code provided in the paper.