

Abstract
We show that every plumbing of disc bundles over surfaces whose genera satisfy a simple inequality may be embedded as a convex submanifold in some closed hyperbolic four-manifold. In particular its interior has a geometrically finite hyperbolic structure that covers a closed hyperbolic four-manifold.
Keywords: Hyperbolic 4-manifold, Plumbing, Intersection form
Introduction
We study the following general question. All the manifolds in this paper are assumed implicitly to be smooth, connected, and oriented, unless otherwise stated.
Question 1
Let M be a compact smooth n-manifold with non-empty boundary. Is there a closed hyperbolic n-manifold W containing M as a convex submanifold?
Here convex means that every arc in M is homotopic (relative to its endpoints) in M to a geodesic. This is in fact a local property of the boundary of M, since M is convex if and only if it is locally convex [2, Section 1.3].
In dimension the answer to this question is positive for any given surface M with boundary. In dimension , it is positive precisely when M is irreducible and algebraically atoroidal (that is, does not contain ). This is a manifestation of geometrisation, see Remark 9.
Why are we interested in convex submanifolds in closed hyperbolic manifolds? One motivation is that being convex gives M some privileges. The embedding is necessarily -injective, and the cover associated to the subgroup is a geometrically finite complete hyperbolic manifold diffeomorphic to the interior of M. So in particular the interior of M has a geometrically finite hyperbolic structure that covers the closed hyperbolic W. See Sect. 2.1.
We would like to investigate Question 1 in the higher dimensions , where our knowledge of the topology of hyperbolic manifolds is embarrassingly poor. The main contribution of this paper is to furnish a family of examples in dimension 4.
Plumbings
Recall that a plumbing graph is a graph where every node is assigned a pair of integers with , and every edge is given a sign . Loops and multiple edges connecting two nodes are allowed. Given a plumbing graph, one may construct an oriented compact four-manifold M, called a plumbing, by taking for each vertex the disc bundle with Euler number over the surface with genus , and performing for each edge a plumbing along the corresponding bundles that creates a transverse intersection of the base surfaces with sign . See [3, Section 4.6.2] for more details.
The regular neighbourhood of a generically immersed closed (possibly disconnected) surface in a four-manifold is a disjoint union of plumbings. Plumbings are ubiquitous in dimension four and it is natural to ask whether they can be embedded as convex subsets in some closed hyperbolic four-manifold. We prove here the following.
Theorem 2
Let M be a plumbing whose graph satisfies
at every vertex, where is its valence. The manifold M is contained as a convex subset in a closed hyperbolic four-manifold W with
for some independent of the plumbing graph. The same result holds for any manifold M that is a -connected sum of plumbings satisfying the above requirement.
This result is already new (to the best of our knowledge) when the plumbing graph is a point. In this case the manifold M is a disc bundle, and the theorem says that if then M embeds convexly in some closed hyperbolic four-manifold W.
If the graph consists of a vertex and an edge, then M is a self-plumbed disc bundle, and the sufficient condition to embed M convexly in some closed hyperbolic four-manifold is . More generally, if M is constructed by self-plumbing k times a disc bundle (with any signs ), the condition is .
We note that the inequality is a necessary condition in general, because on a convex compact hyperbolic manifold M we have and , so neither spheres nor tori are allowed in the plumbing.
Theorem 2 implies the following.
Corollary 3
For every symmetric integer matrix Q there is a boundary connected sum of plumbings M with intersection form Q that embeds as a convex submanifold into a closed hyperbolic 4-manifold W.
Proof
If Q is a matrix, pick a plumbing graph with k vertices such that and there are edges connecting the vertices , all decorated with . Pick any that satisfies the inequality of Theorem 2. We get a plumbing M with intersection form Q that embeds convexly in a closed hyperbolic 4-manifold. If M is disconnected (that is, if Q is reducible), we priorly connect it with some -connected sums: this operation is allowed by Theorem 2.
Corollary 4
For every symmetric integer matrix Q there is a boundary connected sum of plumbings M with intersection form Q, whose interior admits a geometrically finite complete hyperbolic structure that covers a closed hyperbolic manifold W.
All these manifolds M and W are constructed by assembling right-angled 120-cells. In particular all the closed manifolds W constructed here cover the same Coxeter simplex orbifold .
Related work
The first complete hyperbolic structures on the interior of some disc bundles over surfaces with genus and Euler number were exhibited by Gromov – Lawson – Thurston [4] and Kapovich [5]. Kuiper [9] built specimens for all e, g with , and then Luo [11] for all . More recently Anan’in and Chiovetto [1] constructed some examples with . Gromov – Lawson – Thurston [4] conjectured that in all cases.
Our contribution is to show that when the disc bundle embeds convexly in a closed hyperbolic four-manifold, and this is a stronger property than having a complete hyperbolic structure in its interior.
In Theorem 2, if is odd for some i then both M and W have odd intersection form and are hence both non-spin. We find here many examples of non-spin closed hyperbolic 4-manifolds W. We constructed the first such manifolds recently in [14], and the techniques employed here are an extension of these.
We note that any compact hyperbolic manifold M with geodesic boundary embeds convexly in a closed hyperbolic manifold W, constructed simply by mirroring M along . Such manifolds M exist in all dimensions, also with connected boundary [10]. Some explicit examples were constructed in [8] using the right-angled 120-cell. The holonomy representations of these manifolds are locally rigid in dimension , see [7]. A plumbing cannot have a hyperbolic metric with geodesic boundary because its boundary is a graph manifold and hence does not admit any hyperbolic metric.
A comprehensive survey on higher dimensional Kleinian groups is [6], a shorter one on finite-volume hyperbolic 4-manifold is [13].
Outline of the construction
We define for every triple of integers e, i, g with and
an oriented hyperbolic 4-manifold with right-angled corners . The manifold is diffeomorphic (after smoothing its corners) to the disc bundle over the genus-g surface with Euler number e. It is tessellated into right-angled 120-cells and contains i islands: these are some safety zones that will be used to perform the plumbings. The construction of follows the main theme of [14] with some modifications.
We then plumb the 4-manifolds with corners as prescribed by the given plumbing graph. The resulting plumbing M has again the structure of a hyperbolic four-manifold with right-angled corners. By colouring and mirroring its facets we embed it as a convex submanifold into a closed hyperbolic four-manifold W.
The hyperbolic manifolds with right-angled corners , and then M and W, are all tessellated into a certain number of right-angled 120-cells. The base surfaces of the disc bundles form altogether an immersed surface , pleated along some edges, contained in the 2-skeleton of M. The immersed surface S is tessellated into right-angled pentagons.
Further research
We think that the techniques introduced here may be extended to construct many more compact hyperbolic 4-manifolds with right-angled corners, and hence many more compact 4-manifolds that embed convexly in some closed hyperbolic 4-manifold.
Another natural research theme would consist of studying the deformations of the convex hyperbolic structures constructed in this paper, and their degenerations, as it has been done fruitfully in dimension 3 in the last decades.
Preliminaries
Convex submanifolds
We recall some well-known facts on convex hyperbolic manifolds. We refer to [2, Section 1.3] for a detailed introduction.
A smooth manifold M with boundary is hyperbolic if it has constant sectional curvature . Equivalently, it is locally isometric to some n-submanifold with boundary of .
A connected hyperbolic manifold M with boundary is convex if every arc in M is homotopic (relative to its endpoints) to a geodesic. This is a local property: the manifold M is convex if and only if it is locally convex, that is every point has a convex neighbourhood [2, Corollary 1.3.7].
A connected hyperbolic manifold M with boundary is complete and convex if and only if the developing map is a diffeomorphism onto a convex complete submanifold , see [2, Proposition 1.4.2]. In this case we may see M directly as for some discrete .
We then use the convexity of C to show that acts freely. Suppose by contradiction that fixes some . Let denote the closest-point projection of x to C. Since the map is -equivariant, will be a fixed point for the action of on C, which is absurd.
Therefore M naturally embeds isometrically in a unique complete hyperbolic manifold of the same dimension without boundary, such that the inclusion induces an isomorphism of fundamental groups [2, Theorem 2.4.1]. We call the extension of M.
Proposition 5
Let M be a compact convex hyperbolic manifold with boundary. Its extension is geometrically finite and diffeomorphic to the interior of M.
Proof
For every and we let be the point reached at time t by the unit speed geodesic starting from x orthogonally to and directed outside C. We get a diffeomorphism . The leaf consists of all the points at distance t from C. Since f is -equivariant, the function descends to a diffeomorphism . Therefore is diffeomorphic to the interior of M.
The extension of M is geometrically finite, since its convex core is contained in the compact convex submanifold M.
Proposition 6
Let be a convex compact submanifold of a complete hyperbolic manifold W without boundary of the same dimension. The induced map is injective and the covering of W induced by the subgroup is isometric to the extension of M.
Proof
The counterimage of M in the universal cover of W is a disjoint union of convex submanifolds. Since convex submanifolds in are contractible and in particular simply connected, we deduce that M is -injective in W. The covering of W determined by the subgroup is the extension of M by construction.
Hyperbolic manifolds with right-angled corners
We recall some of the terminology and techniques introduced in [14].
We represent the hyperbolic space via the disc model . Let be the intersection of the (pairwise orthogonal) half-spaces . A hyperbolic manifold with right-angled corners is a topological n-manifold M, possibly with boundary, equipped with an atlas in P and transition maps that are restrictions of isometries of . We sometimes drop the words “right-angled” from the definition and simply call M a manifold with corners.
The boundary of a manifold with corners M is naturally stratified into connected closed k-dimensional strata called faces, that we call vertices, edges, and facets if and , respectively. Every face is abstractly itself a hyperbolic k-manifold with corners; note that a face may not be embedded, because it may be incident multiple times to the same lower-dimensional face.
A hyperbolic manifold M with corners may also be defined as a hyperbolic orbifold with mirrors, with isotropy groups generated by k reflections along orthogonal hyperplanes. We will not need this interpretation, however. Hyperbolic manifolds with geodesic boundary and right-angled polytopes are particular kinds of hyperbolic manifolds with corners.
Let M be a (possibly disconnected) hyperbolic manifold with corners. If we glue isometrically two disjoint embedded facets of M, we get a new hyperbolic manifold with corners. This is a crucial property. For instance, we may choose some disjoint embedded facets of M and mirror M along them (that is, take two copies of M and identify isometrically the pairs of selected facets).
Proposition 7
Every compact connected hyperbolic manifold M with right-angled corners, whose facets are all embedded, is contained in a closed connected hyperbolic manifold W of the same dimension.
Proof
We construct W from M by colouring and mirroring. Assign to each facet of M a colour in , so that adjacent facets have different colours. (For instance, assign distinct colours to distinct facets.) Mirror M iteratively along the facets coloured with . We end up with a closed hyperbolic W tessellated into copies of M. In fact we get an orbifold covering .
This is equivalent to taking copies of M with , and identifying every facet in coloured with with the corresponding facet in .
If M is compact, oriented and connected, then W also is by construction.
By smoothing its boundary we can transform every hyperbolic manifold with corners into a convex hyperbolic manifold. By combining this fact with Proposition 7 we get a class of manifolds for which Question 1 has a positive answer.
Corollary 8
Let M be a compact connected hyperbolic n-manifold with right-angled corners, whose facets are all embedded. By smoothing , we get a smooth manifold that embeds as a convex submanifold into a closed hyperbolic n-manifold.
Remark 9
For a given compact manifold M with non-empty boundary, the property of having a hyperbolic structure with right-angled corners may look more restrictive than having a convex hyperbolic structure. Contrary to that impression, in dimension 2 and 3 any compact manifold M with boundary that has a convex hyperbolic structure also has a hyperbolic structure with right-angled corners.
Indeed every compact surface with boundary has both structures, and a consequence of geometrisation is that in dimension 3 the manifold M has any of the two structures if and only if M is irreducible and algebraically atoroidal (that is, does not contain ). These conditions are certainly necessary for M having a convex hyperbolic structure, and are also sufficient to equip M with a hyperbolic structure with right-angled corners: it suffices to decorate with a sufficiently complicated trivalent graph to ensure that M has a hyperbolic structure with right-angled corners bent precisely at , see [15, Page 83 and Proposition 7.2].
Regular right-angled polytopes and thickenings
In dimension 3 the abundance of right-angled polytopes is regulated by Andreev’s Theorem. In dimension 4 our knowledge is much more limited, and the main tools used in the literature to construct manifolds are the regular right-angled polytopes: the ideal 24-cell and the compact 120-cell. Their facets are ideal right-angled octahedra and compact right-angled dodecahedra, respectively. The 2-faces of the latter are right-angled pentagons.
The existence of such regular polytopes allows us to define a thickening of manifolds with right-angled corners in particular cases, as follows. This procedure was first described in [12].
Suppose that N is a hyperbolic n-manifold with right-angled corners, tessellated into right-angled regular pentagons, dodecahedra, or ideal octahedra. Of course we have , 3, or 3, respectively. The thickening of N is the hyperbolic -manifold with right-angled corners M, defined from N by attaching to each pentagon (or dodecahedron, octahedron) P two regular right-angled dodecahedra (or 120-cells, 24-cells), one “above” and the other “below” P. Two dodecahedra (or 120-cells, 24-cells) attached from the same side (above or below) to two pentagons (or dodecahedra, octahedra) and that intersect in some edge (or face) f should be attached correspondingly along their faces (or facets) incident to f via the unique possible isometry that matches with f. This is possible because all the objects involved are regular, so every self-isometry of any facet extend to a self-isometry of the object.
The thickening M of N is a hyperbolic -manifold with corners that deformation retracts onto N. If N is tessellated into k pentagons (or dodecahedra, octahedra), then M is tessellated into 2k dodecahedra (or 120-cells, 24-cells). The facets of M are of three kinds: the vertical ones that contain (and correspond to) the facets of N, and the top and bottom ones that are contained in the dodecahedra (or 120-cells, 24-cells) that were attached above or below, and are not adjacent to the original N.
The construction
We prove here Theorem 2, expanding some of the ideas of [14].
We define for every triple of integers e, i, g with and
an oriented hyperbolic 4-manifold with corners . The manifold is diffeomorphic (after smoothing its corners) to the disc bundle over the genus-g surface with Euler number e. It is tessellated into right-angled 120-cells and contains i islands, some zones (to be defined below) that will be used to perform the plumbings. Its facets are all embedded, so that Proposition 7 can be applied.
To improve clarity, we subdivide the construction of in some steps in the next sections. We perform the plumbing in Sect. 3.6, and conclude the proof of Theorem 2 in Sect. 3.7 by estimating the volume of M and W.
The surface with corners
The starting point of our construction is the hyperbolic surface with corners tessellated into 8 right-angled pentagons shown in Fig. 1-(left). The surface is topologically a torus with one hole. Its boundary has four vertices, two edges of length , and two edges of length , where is the length of the side of the right-angled regular pentagon.
Fig. 1.

A hyperbolic holed torus with corners tessellated into 8 right-angled pentagons. Edges marked with the same letters should be identified isometrically following the arrows (left). The holed torus deformation retracts onto a -graph , drawn in red, which is in turn the union of three oriented simple closed curves , , (right)
The 1-skeleton of contains a -graph , onto which deformation retracts. The -graph is the union of three oriented curves , whose sum vanishes homologically. The curves and are shown in Fig. 2.
Fig. 2.

The curves and in
We assign to the orientation of Fig. 1. There is an orientation-reversing isometry of sending to .
The 3-manifold with corners N
We now construct an oriented hyperbolic 3-manifold with corners N that has one face isometric to .
Figure 3 shows a right-angled polyhedron obtained by taking the eight dodecahedra adjacent to a single vertex v in the tessellation of into right-angled dodecahedra. The polyhedron P has the symmetries of a cube with centre v.
Fig. 3.

A right-angled hyperbolic polyhedron P tessellated into eight right-angled dodecahedra
We take two copies of P and identify isometrically some of their faces as prescribed by Fig. 4. Six pairs of faces, numbered from 1 to 6, are identified. The result is a hyperbolic 3-manifold with corners. Note that the two octagonal yellow faces shown in the figure are glued along their sides, to form a face isometric to .
Fig. 4.

Two copies of P. We identify isometrically six pairs of facets, numbered here as , following the arrows. The result is a hyperbolic 3-manifold with corners that contains as a face (made of the two yellow octagons). Unfortunately the hyperbolic 3-manifold with corners contains a non-embedded face (marked here with green dots), so a more complicated construction is needed
This 3-manifold with corners just constructed is almost fine for our purposes, except that unfortunately it has some non-embedded faces, a fact that we want to avoid. Indeed, the four pentagons marked with a green dot in Fig. 4 are attached along their boundaries to form a single non-embedded octagonal face. We already faced this issue in [14]. There, we solved it by mirroring the polyhedron along some faces. Here we follow another strategy that is more suited to the present setting.
To resolve this problem we use a bigger polyhedron instead of P, built as follows. Let e be the edge separating the two green-dotted faces in P. We attach three dodecahedra to e, in the only possible way: we first attach one dodecahedron to each green-dotted face, and then a third one to cap off the resulting forbidden concave angle of 270 degrees at e. This operation enlarges P to a bigger convex polyhedron in , tessellated into dodecahedra. The edge e lies in the interior of the new polyhedron. By a careful analysis we find that the boundary pattern of the corners changes as shown in Fig. 5.
Fig. 5.
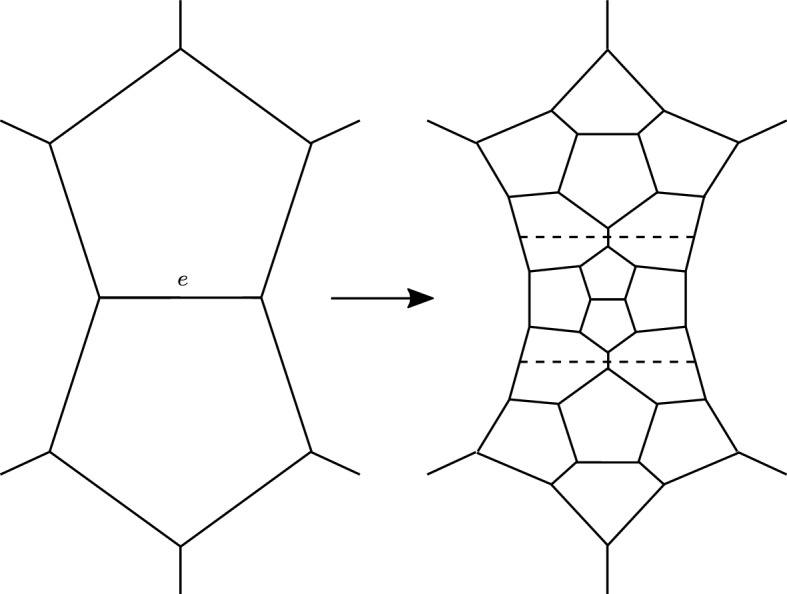
We attach three dodecahedra to an external edge e separating two boundary pentagons. The boundary pattern of the corners changes as shown here. The dashed lines (which are not corners) separate the three dodecahedra
We do this enlargement in a more symmetric way, not only on the pair of green-dotted faces of P, but also simultaneously on 7 more pairs of faces of similar kind, so on 8 pairs overall. We do this to the other pair of adjacent pentagons incident to the face marked with a 5 in Fig. 4-(left), because these have the same problem noted above (they become the same face after the identification). We also do it the other 6 pairs of adjacent pentagons obtained from these two by applying all symmetries of P that preserve the yellow octagon. Let Q be the resulting convex hyperbolic polyhedron, tessellated in dodecahedra. We take two copies of Q and identify the faces as suggested in Fig. 4. These identifications were defined for P, but they also extend uniquely to Q because Q has been enlarged in a symmetric way. These identifications produce a hyperbolic 3-manifold with corners N.
We have constructed our 3-manifold with corners N. We now study its topology. Figure 4 shows in each copy of P a red closed curve , contained in the 1-skeleton of the boundary. The cone over with centre v is a disc D contained in the 2-skeleton of the tessellation of P. The disc D is tessellated into 3 pentagons and is pleated at right angles along three orthogonal edges exiting from v. The two such discs D and in the two copies of P glue to form a torus with one hole .
The boundary lies in the yellow face that is isometric to , and coincides there with either the curve or , depending on the chosen identification between the yellow face and . We fix once for all an identification that sends to . We orient N coherently with the orientation of .
It is important to note that N deformation retracts onto . This can be proved by looking at Fig. 4.
The 3-manifold with corners
We now construct another oriented hyperbolic 3-manifold with corners , that depends on the initial parameters e, i, g. Recall that .
We first build a surface tessellated into pentagons, as follows. We start with a row of i copies of the surface shown in Fig. 6, to which we attach some pieces as in Fig. 7 in order to ensure that has exactly |e| boundary components and genus . This is possible since . The surface has and is tessellated into right-angled pentagons.
Fig. 6.
A hyperbolic surface of genus two with two boundary components, tessellated into 16 right-angled pentagons. The surface contains i portions of this type
Fig. 7.

A hyperbolic surface with k boundary components and genus 1, tessellated into 4k right-angled pentagons. We show here the cases , the picture for a general k is easily deduced
We construct a hyperbolic 3-manifold with corners by thickening as described in Sect. 2.3. Clearly deformation retracts onto . Each of the |e| boundary components of has length (again, is the edge length of the right-angled pentagon) and is contained in an annular face of tessellated into 8 right-angled pentagons. This face is like from Fig. 1, except that the edges labeled with B are not identified. By identifying isometrically two pentagonal faces of incident to these two B edges we transform this face into a new face that is isometric with . We apply one such identification at every boundary component of . To be more precise, we do this in an orientation-coherent way: we fix an orientation for , and choose the B edges coherently everywhere, so that with the induced orientation on these |e| new faces will all be orientation-preservingly isometric to .
The result is an oriented hyperbolic 3-manifold with corners . It has |e| faces , each orientation-preservingly isometric to . It is tessellated into right-angled dodecahedra. By construction, it deformation retracts onto where is the corresponding -graph.
The skeleton and the surface S
We combine all the objects defined in the previous sections to build a 3-dimensional object tessellated by right-angled dodecahedra, called the skeleton (since the desired 4-manifold with corners will be a thickening of ).
Recall that N and have respectively one and |e| faces that are orientation-preservingly identified with , and that has an orientation-reversing isometric involution sending to . The skeleton is constructed by taking and then attaching to each face , two copies of N along their faces identified with . We identify via the identity and via .
The skeleton is a 3-dimensional object. If it is not a manifold, because it is singular at the surfaces , to each of which three manifolds with boundary are locally attached.
Let , be the holed tori introduced in Sect. 3.2. The crucial fact here is that the surfaces , , and are attached to the curves and of , respectively. Therefore
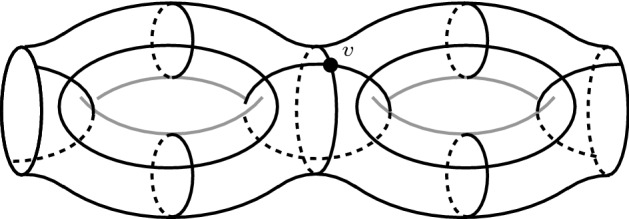
is a surface of genus g. For instance, for we get a surface S of genus 6 as in Fig. 8. Note that is totally geodesic, while each and is pleated along some arcs and vertices. Another important fact is that by construction the skeleton deformation retracts onto S.
Fig. 8.

The surface
The 4-manifold with corners
We now construct the hyperbolic 4-manifold with corners by appropriately thickening the skeleton , as sketched in Fig. 9-(left). This is done rigorously as follows. For every we consider the oriented hyperbolic 3-manifold with corners and thicken it as described in Sect. 2.3. We also thicken . All these thickenings are oriented.
Fig. 9.

We thicken the skeleton to a hyperbolic 4-manifold with corners by attaching 120-cells. Here we draw the construction in dimension 2, with segments and pentagons instead of dodecahedra and 120-cells (left). This may be seen rigorously as a two-step procedure, where we first thicken and separately and then we identify the grey 120-cells (right)
Now we identify in pairs (in an orientation-preserving way) the sixteen 120-cells in the thickening of incident to with the sixteen 120-cells in the thickening of that are incident to from below, as in Fig. 9-(right). There is a natural unambiguous way to do this, as suggested by the figure. Note that by construction all the 120-cells involved are distinct. The fact that such an identification produces indeed a manifold with corners (and in particular does not produce any forbidden concave angle of 270 degrees) is due to hyperbolic geometry (this would not be true in Euclidean geometry). The absence of forbidden concave angles was proved in [14, Lemma 2.5] and the same argument applies here.
If we perform this identification for every we get at the end an oriented hyperbolic 4-manifold with corners . By construction deformation retracts onto its skeleton , and hence onto S. After smoothing its corners, the manifold is a disc bundle over S.
Proposition 10
The disc bundle over the genus-g surface S has Euler number .
Proof
The Euler number may be calculated using a formula of Gromov – Lawson – Thurston [4] as a sum of contributions of the vertices of S. As shown in [14], all the vertices contribute with zero, except two vertices in each , that contribute with each (with the same sign everywhere). Therefore we get .
We could in principle determine the precise sign of the Euler number, but we do not need to do this. We assign once for all to the orientation that gives the bundle the Euler number e.
The parameter i is there to ensure that is large enough to be plumbed geometrically simultaneously in i distinct zones. By construction, the surface contains i portions as in Fig. 6. In each such portion there is a central vertex v as in the figure. The vertex v is adjacent to four distinct embedded pentagons in , and then to 16 distinct embedded 120-cells in . These 16 distinct 120-cells form altogether a big right-angled polytope Z that is the four-dimensional analogue of the polyhedron P shown in Fig. 3. We get Z if we pick all the sixteen 120-cells adjacent to a fixed vertex in the tessellation of into right-angled 120-cells. We call each of the disjoint obtained in this way an island.
The plumbing M
We can now prove the main part of Theorem 2.
Theorem 11
Let M be a -connected sum of plumbings, each whose graph satisfies the inequality
at every vertex, where is it valence. Then M admits a hyperbolic structure with right-angled corners.
Proof
Consider a plumbing graph satisfying the requirement. For each vertex j, pick the hyperbolic manifold with corners , that exists thanks to the assumed inequality. It comes equipped with a genus- surface and disjoint islands.
Each edge of the plumbing graph is decorated with a sign . If it connects the vertices j and , we choose two islands in and , and identify them in a way that makes and intersect orthogonally with the sign . See a picture in dimension two in Fig. 10. We do this for every edge of the plumbing graph.
Fig. 10.

Two islands (coloured in grey) can be plumbed to produce a new hyperbolic manifold with corners. Here we draw segments and pentagons instead of pentagons and 120-cells
The result is a new hyperbolic four-manifold with corners. This follows from the fact that the identifications of islands do not produce forbidden concave angles of 270 degrees. To verify this fact, one has to look more closely at the combinatorics of the 120-cell. We perform an analysis analogous to that of [14, Section 4.3].
Consider the centre v of two identified islands, and let C be one of the 120-cells incident to v. There is precisely one pentagon lying in and one pentagon lying in . These two pentagons intersect each other only in the vertex v. Equivalently, they correspond to opposite edges in the tetrahedral vertex figure of v in C. There are five distinct dodecahedra in C which intersect the pentagon P in an edge. Of these five dodecahedra, two contain the vertex v and the other three, denoted by , do not. Similarly, there are five dodecahedra which intersect , and three of these, denoted by , do not contain the vertex v. The crucial property is that no two dodecahedra of the form , are adjacent in C. This is sufficient to ensure the absence of a concave angle of 270 degrees, as such phenomenon in our setting can only arise when a 120-cell is glued to C along some dodecahedron , and another 120-cell is glued to C along some , with and adjacent in C. We have thus proved that the resulting object is a hyperbolic 4-manifold with right-angled corners.
We have constructed a hyperbolic structure with right-angled corners on every plumbing satisfying the requirements. We may then connect distinct plumbings via geometric -connected sums as follows: we select for each connected component an embedded dodecahedral facet, and glue in pairs through arbitrary isometries these facets. Such dodecahedral facets clearly exist, since we left unpaired many facets of each 120-cell in the construction of . For instance, consider a pentagon P which lies in but not in an island, choose a 120-cell C of which P is a face, and consider the opposite pentagon in C. The two dodecaheda adjacent to are embedded.
The proof is complete by Proposition 7.
Remark 12
By construction, each manifold with corners is tessellated into right-angled 120-cells and the base surface is contained in its 2-skeleton. The surface S is tessellated into right-angled pentagons, that are pleated along some edges and vertices. The pleating can be described locally as follows. Every vertex is adjacent to sixteen 120-cells of the tessellation, whose link at v is the standard triangulation of into sixteen right-angled tetrahedra. The link of S at v is contained in the 1-skeleton of such a triangulation of . By construction, the vertices of S have three possible types of links, shown in Fig. 11-(1, 2, 3). These contribute to the self-intersection respectively with 0, 0, and , via a formula of [4]. The vertices of type (3) are precisely those of . See also [14].
Fig. 11.

The immersed base surface in M have vertices with four types of links. The vertices of type (3) are those of and contribute to the Euler numbers. Those of type (4) are the self-intersections
All these surfaces form altogether an immersed surface in M, still contained in the 2-skeleton, onto which M deformation retracts. The vertices where the immersed surface self-intersect have the Hopf link shown in Fig. 11-(4).
Volume estimates
We conclude here the proof of Theorem 2 by computing the volume of M and estimating that of W.
By construction, the skeleton is tessellated into dodecahedra, where
The addendum is simply the number of dodecahedra of the 3-manifold with corners . The other addendum arises because we glue to each of the |e| boundary components of two copies of the 3-manifold with corners N, with each copy consisting of 64 dodecahedra.
So is tessellated into 120-cells, where
This is true because the thickening of to can be seen as a two-step procedure: we first thicken each of and the |e| copies of N separately (thus obtaining a total of distinct 120-cells) and then identify sixteen 120-cells from the thickening of each copy of N to sixteen 120-cells from the thickening of as in Fig. 9.
Let now V and E be the number of vertices and edges of the plumbing graph, respectively. Then M is tessellated into m distinct 120-cells, where
Again, this holds true because each of the E plumbings which we perform as in Fig. 10 identifies two distinct sets of sixteen 120-cells from the various ’s into a single one.
Since the right-angled 120-cell has volume , we have
The inequality follows from , which is true since by hypothesis. We have proved the first inequality of Theorem 2 with
To estimate the volume of W, we notice that the same argument of [12, Lemma 7] applies in this setting. We briefly recall it.
It is not difficult to show that the number of isometry classes of the facets of M is bounded by a constant that does not depend on the plumbing graph. In particular, each facet of M has at most f faces, for some universal f. (A willing reader may explicitly compute or estimate f.) In other words, each vertex of the adjacency graph of the facets of M has valence at most f. Since every finite graph without loops and with valence can be vertex-coloured with at most colours, we can colour the facets of M with at most colours.
By the proof of Proposition 7, we thus can choose W so that
and the proof of Theorem 2 is complete with .
Acknowledgements
Open access funding provided by Università di Pisa within the CRUI-CARE Agreement. Open access funding provided by Università di Pisa within the CRUI-CARE Agreement. We thank Steven Tschantz for producing and sharing the pictures in Fig. 3 and 4. Stefano Riolo was supported by Schweizerischer Nationalfonds zur Förderung der Wissenschaftlichen Forschung (Grant No. PP00P2-170560).
Footnotes
S. R. was supported by the SNSF project no. PP00P2-170560, and thanks the Mathematics Department of the University of Pisa for the hospitality.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Contributor Information
Bruno Martelli, Email: martelli@dm.unipi.it.
Stefano Riolo, Email: riolo@mail.dm.unipi.it.
Leone Slavich, Email: leone.slavich@gmail.com.
References
- 1.Anan’in, S., Chiovetto, P.: A couple of real hyperbolic disc bundles over surfaces, arXiv:1609.02206, to appear in Groups, Geometry, and Dynamics
- 2.Canary, R. D., Epstein, D. B. A., Green, P. L.: Notes on notes of Thurston, from “Analytical and geometric aspects of hyperbolic space (Coventry/Durham, 1984)”, London Math. Soc. Lecture Note Ser. 111, Cambridge Univ. Press, Cambridge 3–92 (1987)
- 3.Gompf, R.E., Stipsicz, A.I.: 4-manifolds and Kirby calculus, Graduate Studies in Mathematics, 20, American Mathematical Society, Providence, RI (1999)
- 4.Gromov, M., Lawson, H. B., Thurston, W. P.: Hyperbolic -manifolds and conformally flat 3-manifolds, Publ. Math., Inst. Hautes Étud. Sci. 68, 27–45 (1988)
- 5.Kapovich M. Flat conformal structures on 3-manifolds. J. Differ. Geom. 1993;38:191–215. doi: 10.4310/jdg/1214454100. [DOI] [Google Scholar]
- 6.Kapovich, M.: Kleinian groups in higher dimensions, Geometry and dynamics of groups and spaces, 487–564, Progr. Math., 265, Birkhuser, Basel, (2008)
- 7.Kerckhoff SP, Storm PA. Local rigidity of hyperbolic manifolds with geodesic boundary. J. Topol. 2012;5:757–784. doi: 10.1112/jtopol/jts018. [DOI] [Google Scholar]
- 8.Kolpakov A, Martelli B, Tschantz S. Some hyperbolic three-manifolds that bound geometrically. Proc. Am. Math. Soc. 2015;143:4103–4111. doi: 10.1090/proc/12520. [DOI] [Google Scholar]
- 9.Kuiper, N.: Hyperbolic manifolds and tessellations, Publ. Math., Inst. Hautes Étud. Sci. 68, 47–76 (1988)
- 10.Long DD, Reid AW. Constructing hyperbolic manifolds which bound geometrically. Math. Research Lett. 2001;8:443456. doi: 10.4310/MRL.2001.v8.n4.a5. [DOI] [Google Scholar]
- 11.Luo F. Möbius structures on Seifert manifolds. I. J. Differ. Geom. 1995;42:634–664. doi: 10.4310/jdg/1214457551. [DOI] [Google Scholar]
- 12.Martelli, B.: Hyperbolic three-manifolds that embed geodesically, arXiv:1510.06325
- 13.Martelli, B.: Hyperbolic four-manifolds, Handbook of Group Actions, Volume III. Advanced Lectures in Mathematics series 40, 37–58 (2018)
- 14.Martelli, B., Riolo, S., Slavich, L.: Compact hyperbolic manifolds without spin structures, arXiv:1904.12720, to appear in Geom. Topol
- 15.Otal, J. P.: Thurston’s Hyperbolization of Haken Manifolds, Surveys in differential geometry, Vol III (Cambridge, MA, 1996), 77-194, Int Press, Boston, MA, (1998)