

Abstract
The development of intelligent manufacturing often focuses on production flexibility, customization and quality control, which are crucial for chip manufacturing. Specifically, defect detection and classification are important for manufacturing processes in the semiconductor and electronics industries. The intelligent detection methods of chip defects are still challenge and have always been a particular concern of chip processing manufactures in an automated industrial production line. YOLOv4 method has been widely used for object detection due to its accuracy and speed. However, there are still difficulties and challenges in the detection for small targets, especially defects on chip surface. This study proposed a small object detection method based on YOLOv4 for small object in order to improve the performance of detection. It includes expanding feature fusion of shallow features; using k-means++ clustering to optimize the number and size of anchor box; and removing redundant YOLO head network branches to increase detection efficiency. The results of experiments reflect that SO-YOLO is superior to the original YOLOv4, YOLOv5s, and YOLOv5l models in terms of the number of parameters, classification and detection accuracy.
Subject terms: Electrical and electronic engineering, Mechanical engineering
Introduction
Problem description and motivation
The development of intelligent manufacturing often focuses on production flexibility, customization and quality control, which are crucial for chip manufacturing. Specifically, defect detection and classification are important for manufacturing processes in the semiconductor and electronics industries1. Defect detection is critical for efficient product quality control. The traditional detection method relies on labor, and long-term manual detection can cause low detection efficiency and high rate of missing inspections. In addition, most of the defective chips are either recycled or reprocessed, and those cannot be reprocessed often get scrapped directly2.
Thus, it is also necessary to classify defective chips into types of defection for more effective processing. It provides rich information for production faulty inspection. However, most of the detection methods are still based on manual detection methods3. Therefore, the intelligent detection methods of chip defects are still challenge and have always been a particular concern of chip processing manufactures in an automated industrial production line2.
There are various types of chip defects such as interfacial stress and solder joint reliability of the chip packages could occur during chip manufacturing process4. This study focuses on defects that related to large area missing at the edge, small area missing at the edge, excess solder and pits, and breach defect, see Fig. 1. For example, Fig. 1a,b are considered to be the same kind of defect but with different dimensions.
Figure 1.

Common chip surface defects, (a) large area missing, (b) small area missing, (c) excess solder, (d) pits, (e) breach. (c) excess solder characterized by a bulge at the margin of chip, with a very small thickness of about 0.1 mm. (d) pit defect characterized by an irregular depression. (e) breach defect characterized by a width of 0.3mm and a length of 1mm.
You Only Look Once v4 (YOLOv4) method has been widely used for object detection due to its accuracy and speed. However, there are still difficulties and challenges in the detection for small targets, especially the defects on chip surface. Therefore, this study proposed a small object detection method (SO-YOLO) based on YOLOv4 for small object in order to improve the performance of detection. For example, the result of the SO-YOLO small object detection is shown in Fig. 2.
Figure 2.
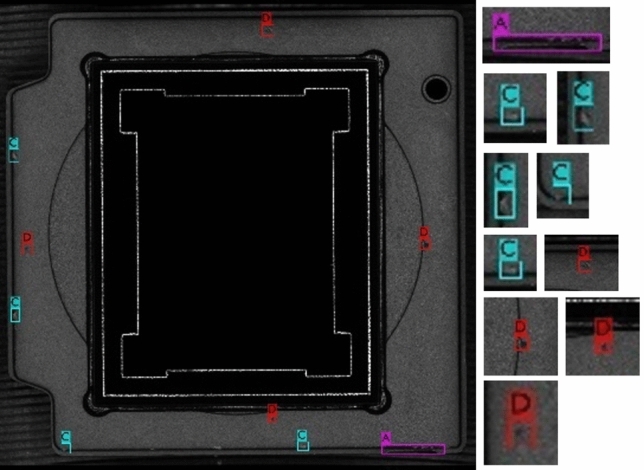
Result of SO-YOLO defect detection on sample chip image.
Contributions of this study
The proposed architecture of SO-YOLO is inspired by YOLOv4 network model and three modifications were made specifically for small object detection.
First, a new Feature Fusion method that expands the fusion of shallow features is proposed to satisfy small object detection and further improve the network prediction accuracy without reducing the speed. In order to improve the accuracy of small object detection, we made modifications for the Feature Fusion (FF) module, and network pruning. Instead of a normal Feature Fusion, the SO-YOLO adapts module based on Convolution Neural Networks (CNNs). Deep CNNs can learn hierarchical features in different layers which capture information from different scale objects. Specifically, spatial-rich features in shallow layers have higher resolutions and are more beneficial to the detection of small objects5,6. However, DSSD and FPN7 leverage the deconvolution layer from the top-most feature maps which may lost the majority of fine details for small objects. And these systems based on fusion features carry out connections for every prediction layer, which means more additional layers result in more computational cost at the same time. Increasing the number of fusion layers can better retaining the information of the targeted object8. Therefore, it is difficult to accurately detect small object relying on top-level layers only. The proposed Feature Fusion method is more appropriate for small object detection.
Second, the k-means++ clustering algorithm is used to optimize the number and size of anchor box adaptively during training. In order to improve the performance of defect detection on small object, it is necessary to have priori boxes adapted to the sample size first. Then the prior anchor boxes are used for detection, which can enhance the adaptability of the prediction scale.
Third, for the purpose of small object detection, redundant YOLO head network branches are removed except the large-scale feature layer, in order to reduce the model parameters and calculation. Due to the size of chips is approximately 6.6 6.6 millimeters (mm), and the average defect area size is approximately 0.3 0.3(mm), the common detection methods are not appropriate for small object detection9. Therefore, all network branches are removed except the large-scale feature layer.
Related work
In recent years, machine learning methods has been widely used in surface defect detection and quality control8,10. For instance, detector based on RCNN family (R-CNN11, Fast R-CNN12, Faster R-CNN13, and Mask R-CNN14) algorithm converts the defect detection problem into a two-stage object detection problem15. It outperforms numerous algorithms in terms of detection accuracy. However, this kind of approach requires longer computational processing time comparing to one-stage detector such as single-shot multibox detector (SSD)16 and YOLO5. Especially, the YOLOv46 algorithm has fast-operating speed and optimized parallel calculations for object detection.
More accurate detectors such as Fast R-CNN and Faster R-CNN are proposed by RGB et al recently11,12. Especially, the Faster R-CNN which inspired by Spatial Pyramid Pooling Net (SPPNet)17, putting forward the Region Proposal Network (RPN). An RPN is a fully convolutional network that simultaneously predicts object bounds and object scores at each position. Nevertheless, the top-most feature maps conflict with objects at different scales in images due to their fixed receptive field18. There is little in-formation left on the top-most features especially for small objects, so it is hard to be used on our study about chip surface defects detection.
Liu et al. proposed a method named SSD, which predicted objects by using multi-scale feature maps. SSD used the features from the shallow layers to detect smaller objects, while exploited the features from the deeper layers for bigger objects detection. However, due to lack of deeper semantic features, this method has a poor detection effect on small objects. Afterwards, Fu et al19. proposed a deconvolutional single-shot detector (DSSD), which increased lots of context information with using deconvolution layer. Alt-hough, DSSD algorithm realized a better detection accuracy, cost more prediction time. Deep-learning methods began being applied more often to surface-defect classification and detection problems shortly after the introduction of AlexNet20. Domen Tabernik et al.21 proposed a two-stage approach with segmentation network and the decision network, for the surface-quality control. The approach is suited to learn from a small number of detected training samples, but can still achieve state-of-the-art results. The work by Lv, et al.22 showed that for deep metallic surface defect detection the limited data scale and defect categories causing existing defect datasets are unavailable. To address this problem, they proposed an end-to-end defect detection network (EDDN), which based on the Single Shot MultiBox Detector. L, Xu et al.23 proposed a weakly supervised detection framework which uses localization and decision networks to predict the location and probability of defects simultaneously on a small subsets of defect samples and developed a new loss function. Experimental results exhibited a 99.5% recognition accuracy. Li, Y et al.9 proposed a detection method for surface defects, which combines the SSD network with the base convolution neural network MobileNet. In the pre-processing phase, they presented a regional planning method to cut out the main body of the defect, which reduces the redundant parameters and improve detection speed and accuracy. Liu et al.8 directly adopted the YOLOv3 as the meta structure for small object detection on Unmanned Aerial Vehicle Perspective, but they optimized the Resblock in darknet by concatenating two ResNet units that have the same width and height. Experimental results show a distinct performance improvement. Xu et al.3 proposed a small data-driven CNN for roller subtle defect inspection via an ensemble method for small data preprocessing. SDD-CNN applied LD to solve the imbalance in class distribution and presented the SSDA method to extent dataset, which had a good performance in the defect classification.
In today’s industrial product inspection field, automated inspection techniques such as deep learning and machine learning are gradually replacing traditional manual-based inspection methods15,24. Real-time detection has become the goal pursued by industrial product defect detection. Although deep learning has achieved better results in industrial defect detection, it still faces challenges such as incomplete defect data sets, small samples, and small targets.
SO-YOLO method
Detection algorithm framework
The common object detection framework consists of the backbone, neck, and head networks. The backbone network, such as the VGG Net, ResNet7, Inception Net25, is used for extracting features from the image. The neck network, such as Feature Pyramid Network (FPN)26, Path Aggregation Network (PANet)27, BiFPN28, has been widely used for merging the features of each layer from the bottom-up pathway or the top-down pathway. With the information extracted and processed from the backbone and the neck networks, the head network can be used for prediction. The head network is often categorized into one-stage object detector such as YOLO and SSD, and two-stage object detector such as the R-CNN series.
SO-YOLO network structure
The SO-YOLO network structure consists of four modules, which are the input model, backbone, modified PANet and a detector network, see Fig. 3. The main difference between YOLOv4 and SO-YOLO is the structure of PANet.
Figure 3.

The architecture of the proposed SO-YOLO.
Since lack of shallow features extraction can cause small object miss-detection and lower the detection accuracy, PANnet is modified in SO-YOLO to reserve shallow feature information. This modification involves two stages, see Fig. 3. First, input images features are extracted by the backbone network of SO-YOLO. Second, it regresses multiple bounding boxes in the image, and then classifies the objects in each bounding box with a convolutional neural network. PANet with SO-YOLO fusion is proposed to increase both precision and speed of chip defects detection. Lastly, the detector network is used to detect chip defects. PANet is a two-way top-down and bottom-up fusion backbone network, and a bottom-up network is added on the basis of FPN, which is a supplement to the shallow location information in FPN fusion results.
Feature fusion method for small objects
Handling feature scale issues is crucial for small object detection. Specifically, deep semantic-rich features can strengthen shallow spatially-rich features. Feature fusion, which is the integration of multiple different feature information, can obtain both deep se-mantic-rich features and shallow spatially-rich features. So, the method of feature fusion is particularly important for this study.
The PANet structure of YOLOv4 is shown in Fig. 4a. For small objects detection with YOLOv4, first, it up-samples the 1313 feature map obtained from SPP network to 2626, and follow with a fusion between the feature maps. Then, it up-samples the 2626 feature map to 104104 directly. Lastly, it contacts the two feature layers 2626 and 104104 respectively.
Figure 4.

(a) Original fusion structure in YOLOv4 and (b)Modified fusion network in SO-YOLO.
The PANet of YOLOv4 contains both of the shallow and high-level information. However, for small object detection it might have some disadvantages. For instance, up-sampling 2626 straight up to 104104 may lose information for prediction. The number of channels reduced from 256 to 128 may lose information as well. Moreover, the scale of 104104 may increases the amount of model calculation for head network. The Feature Fusion network of proposed SO-YOLO is shown in Fig. 4b.
The structure of modified PANet is shown in Fig. 4b. Instead of up-sampling 2626 to 104104 directly, there is a feature fusion after SPP for each of the feature maps of 2626 with 512 channels, 5252 with 128 channels, and 104104 with 128 channels respectively. Compare to YOLOv4 the proposed SO-YOLO Feature Fusion network added a fusion layer, see Fig. 4.
The pruning network
Enhanced Prior anchor Box. K-means++ clustering algorithm is used to estimate the number and aspect ratio of prior anchor boxes such as the amount and size of the boxes. Then the prior anchor boxes can enhance the ability for determining bounding boxes. The interval of K was set as 1 to 9. As shown in Fig. 5, the results implies that 3 is a knee point of K, which cause a reasonable avg IoU and model complexity. Therefore, the number of cluster centers is determined to be 3, and the size of enhanced bounding boxes obtained on this basis are (11, 11), (10, 51), (56, 10) respectively.
Figure 5.
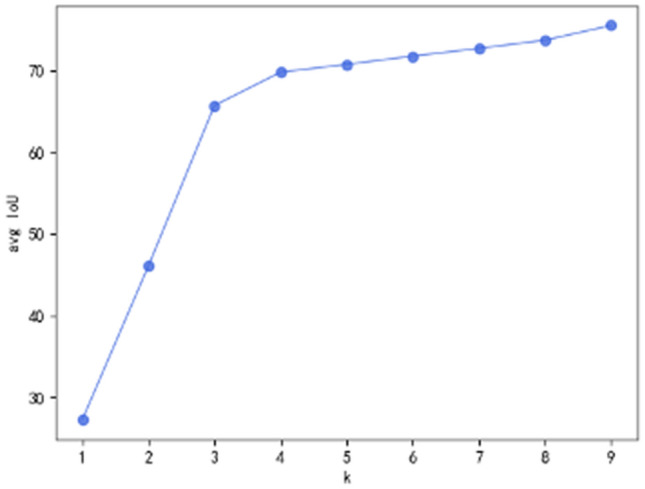
Average IOU results on different number of anchor boxes.
SO-YOLO Head. The original YOLOv4 algorithm allocates 3 bounding boxes for each of the three feature maps with scales 5252, 2626, and 1313 for prediction. For SO-YOLO, deep layer features such as 2626 and 1313 with semantic-rich information have larger receptive fields, which are suitable for detecting small objects specifically. Studies showed that limited receptive filed has difficulty in small object detection8. Hence, this study discarded the small-scale feature maps and reserved the 5252 feature map, which also reduced the complexity of network.
Experiments and results
Chips-surface defect images dataset
Due to lack of publicly available defective chip dataset, this study collected images from a domestic factory. Totally 896 images obtained by two industrial cameras. The dataset images used in this experiment are of high pixel size (2081*2127). The percentage of defective objects in a single image is only 0.36% at minimum. According to the definition of the International Society for Optics and Photonics (SPIE), the object of this study belongs to the field of small object research. Images were divided into training and test datasets with ratio of 9:1. The hardware configuration include one NVIDIA GeForce GTX1660 SUPER graphic card, AMD Ryzen 5 3500X 6-Core Processor, and 16GB RAM. The learning rate, attenuation coefficient and iteration were set to 0.001, 0.0005 and 10,000 times respectively. The darknet framework and Python 3.8 were used.
Image preprocess
The original dataset was expanded using data augmentation methods, which include Geometric Transformation and Mosaic methods. Mosaic data augmentation is based on Cut-Mix theory. The difference is that there are two images spliced in Cut-Mix, but the Mosaic used four. The advantage of using Mosaic is that it enriches the background of image datasets. First, the dataset was expanded to 8 times of the original size using mirroring and rotation. Then, Mosaic method was used to merge images, see Fig. 6.
Figure 6.
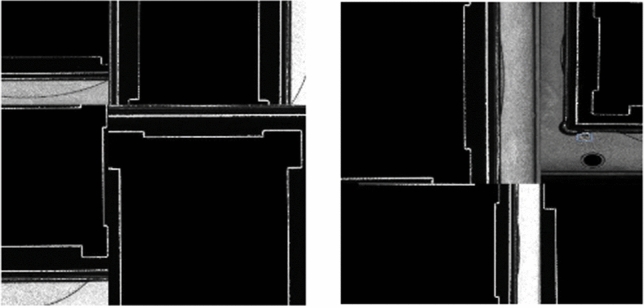
Demonstration of mosaic data enhancement method on sample image.
Experimental results
Object detection performance is evaluated with Average Precision (AP) and mean Average Precision (mAP) between ground truth and predicted bounding box (IOU). To verify the result of the optimized Feature Fusion network, two experiments are performed in this study. The experiment results are shown in Table 1.
Table 1.
Comparison of mAP and IOU on YOLOv4 and SO-YOLO. i.e., “2/128” means Resblock_body repeat 2 times and the dimension of feature map is 128.
| Method | Precision | Recall | F1 score | Average IOU% | mAP% |
|---|---|---|---|---|---|
| SO-YOLO-2/128 | 0.79 | 0.82 | 0.81 | 54.09 | 83.20 |
| SO-YOLO-4/256 | 0.78 | 0.76 | 0.77 | 53.27 | 79.19 |
| SO-YOLO-2/256 | 0.80 | 0.83 | 0.82 | 54.30 | 86.00 |
| YOLOv4 | 0.79 | 0.82 | 0.80 | 54.38 | 82.59 |
Experiment results reported in Table 1 is the average of multiple experiments. It can be seen that increasing the dimension of feature map improved prediction precision. Comparing with SO-YOLO-2/128, which has the same setting of Resblock_body and feature map dimension as YOLOv4, model SO-YOLO-2/256 has outstanding performance. As shown in Table 1, mAP is increased from 83.20 percentage to 86 percentage. Due to the compromise selection of the prior anchor box, the IOU of SO-YOLO is lower than YOLOv4. Comparing to YOLOv4 the proposed method has better performance and also well-balanced accuracy and processing time, see Table 2.
Table 2.
Comparison of network model parameters.
| Version | BFLOPS | Num of layers |
|---|---|---|
| SO-YOLO-2/128 | 48.775 | 149 |
| SO-YOLO-4/256 | 55.398 | 154 |
| SO-YOLO-2/256 | 53.624 | 148 |
| YOLOv4 | 75.843 | 161 |
Table 2 showed the SO-YOLO-4/256 has the greatest number of layers and BFLOPS, but its performance is the worst. The reason could be increased number of parameters and unbalance of semantic and spatial information. Comparing with YOLOv4, the number of network layers of SO-YOLO-2/256 reduced from 161 to 148, and the model parameters reduced from 75.843BFLOPS to 53.624BFLOPS. And it can be viewed in Fig. 7 that the SO-YOLO algorithm has converged after iterating to 8000 times.
Figure 7.
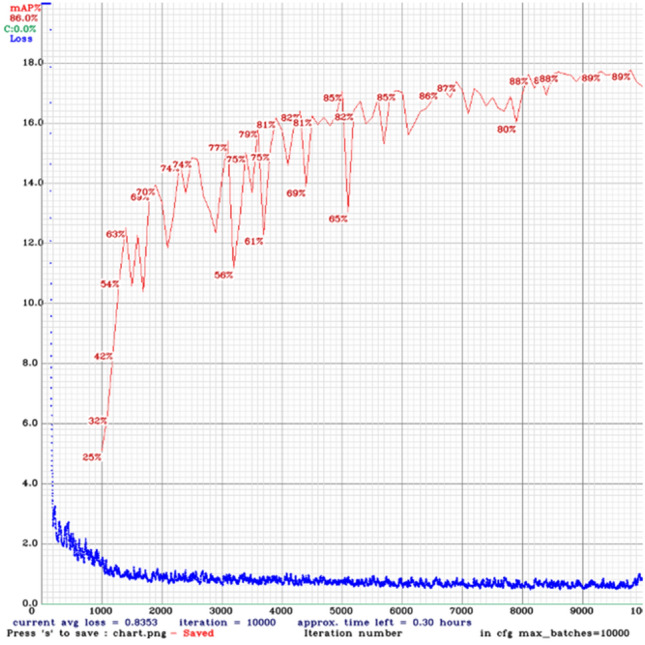
Training loss and mAP of SO-YOLO-2/256.
In order to evaluate the performance of SO-YOLO model, experiments were conducted to compare it with YOLOv4, YOLOv5s, and YOLOv5l, see Table 3. This experiment used same training data set on these models. The results showed that the SO-YOLO model had better performance comparing to YOLOv4, YOLOv5s and YOLOv5l. First, SO-YOLO had the highest mAP. Second, SO-YOLO and YOLOv5s have very close F1 scores, but the accuracy of the YOLOv5s model is lower than the SO-YOLO model. Although the complexity of the YOLOv5s model is simpler. Third, YOLOv5l is the weakest in terms of performance in this comparison. Hence, this experiment confirmed the importance of network depth and shallow information for small object detection. In conclusion, our model not only reduces the complexity of the model, but also can improve the small object detection accuracy.
Table 3.
Comparison of detection accuracy between SO-YOLO and YOLOv4, YOLOv5s, YOLOv5l.
| Model | F1 | mAP | BFLOPS |
|---|---|---|---|
| YOLOv4 | 0.80 | 0.826 | 75.843 |
| YOLOv5s | 0.84 | 0.821 | 14.0 |
| YOLOv5l | 0.73 | 0.711 | 123.1 |
| SO-YOLO | 0.84 | 0.86 | 53.624 |
Discussion
In order to improve the classification and defects detection on chip surface, SO-YOLO is proposed in this study. This study adopted the CspDarknet53 as the meta network structure, and optimized entire PANet using a new method of Feature Fusion. As a result, this method can enhance the receptive field by choosing appropriate layers to make a fusion. Moreover, this study also adopted k-means++ as prior anchor estimation method. Lastly, Mosaic data augmentation method was used to preprocess the dataset. The results of experiments reflect that SO-YOLO is superior to the original YOLOv4 model in terms of the number of parameters, classification and detection accuracy. The proposed feature fusion method and pruning model may be useful for small object detection. We hope detection accuracy and reducing model complexity can be improved in the future study.
Acknowledgements
W.F. was supported by the 2020 Program for Liaoning Excellent Talents (LNET) in University.
Author contributions
H.H. and X.T. wrote the main manuscript text and X.J. prepared figures 1–5. Feng Wen provide extra experiments and analysis. All authors reviewed the manuscript.
Competing interests
The authors declare no competing interests.
Footnotes
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
These authors contributed equally: Haixin Huang, Xueduo Tang, Feng Wen, Xin Jin.
References
- 1.Chou PB, Rao AR, Sturzenbecker MC, Wu FY, Brecher VH. Automatic defect classification for semiconductor manufacturing. Mach. Vis. Appl. 1997;9:201–214. doi: 10.1007/s001380050041. [DOI] [Google Scholar]
- 2.Jiang Q, et al. Object detection and classification of metal polishing shaft surface defects based on convolutional neural network deep learning. Appl. Sci. 2020;10:87. doi: 10.3390/app10010087. [DOI] [Google Scholar]
- 3.Xu X, Zheng H, Guo Z, Wu X, Zheng Z. Sdd-cnn: Small data-driven convolution neural networks for subtle roller defect inspection. Appl. Sci. 2019;9:1364. doi: 10.3390/app9071364. [DOI] [Google Scholar]
- 4.Tsai M-Y, Hsu CJ, Wang CO. Investigation of thermomechanical behaviors of flip chip bga packages during manufacturing process and thermal cycling. IEEE Trans. Components Packag. Technol. 2004;27:568–576. doi: 10.1109/TCAPT.2004.831817. [DOI] [Google Scholar]
- 5.Redmon, J., Divvala, S., Girshick, R. & Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE conference on computer vision and pattern recognition, 779–788 (2016).
- 6.Bochkovskiy, A., Wang, C.-Y. & Liao, H.-Y. M. Yolov4: Optimal speed and accuracy of object detection. arXiv preprintarXiv:2004.10934 (2020).
- 7.He, K., Zhang, X., Ren, S. & Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE conference on computer vision and pattern recognition, 770–778 (2016).
- 8.Liu M, et al. Uav-yolo: small object detection on unmanned aerial vehicle perspective. Sensors. 2020;20:2238. doi: 10.3390/s20082238. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 9.Li Y, Huang H, Xie Q, Yao L, Chen Q. Research on a surface defect detection algorithm based on mobilenet-ssd. Appl. Sci. 2018;8:1678. doi: 10.3390/app8091678. [DOI] [Google Scholar]
- 10.Zhang X, Hao Y, Shangguan H, Zhang P, Wang A. Detection of surface defects on solar cells by fusing multi-channel convolution neural networks. Infrar. Phys. Technol. 2020;108:2020. [Google Scholar]
- 11.Girshick, R., Donahue, J., Darrell, T. & Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE conference on computer vision and pattern recognition, 580–587 (2014).
- 12.Girshick, R. Fast r-cnn in proceedings of the ieee international conference on computer vision (pp. 1440–1448). Piscataway, NJ: IEEE.[Google Scholar] (2015).
- 13.Ren S, He K, Girshick R, Sun J. Faster r-cnn: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016;39:1137–1149. doi: 10.1109/TPAMI.2016.2577031. [DOI] [PubMed] [Google Scholar]
- 14.He, K., Gkioxari, G., Dollár, P. & Girshick, R. Mask r-cnn. In Proceedings of the IEEE international conference on computer vision, 2961–2969 (2017).
- 15.Chen Y, et al. Surface defect detection methods for industrial products: A review. Appl. Sci. 2021;11:7657. doi: 10.3390/app11167657. [DOI] [Google Scholar]
- 16.Liu, W. et al. Ssd: Single shot multibox detector. In European conference on computer vision, 21–37 (Springer, 2016).
- 17.He K, Zhang X, Ren S, Sun J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015;37:1904–1916. doi: 10.1109/TPAMI.2015.2389824. [DOI] [PubMed] [Google Scholar]
- 18.Luo, W., Li, Y., Urtasun, R. & Zemel, R. Understanding the effective receptive field in deep convolutional neural networks. In Proceedings of the 30th International Conference on Neural Information Processing Systems, 4905–4913 (2016).
- 19.Fu, C.-Y., Liu, W., Ranga, A., Tyagi, A. & Berg, A. C. Dssd: Deconvolutional single shot detector. arXiv preprintarXiv:1701.06659 (2017).
- 20.Krizhevsky A, Sutskever I, Hinton GE. Imagenet classification with deep convolutional neural networks. Adv. Neural. Inf. Process. Syst. 2012;25:1097–1105. [Google Scholar]
- 21.Tabernik D, Šela S, Skvarč J, Skočaj D. Segmentation-based deep-learning approach for surface-defect detection. J. Intell. Manuf. 2020;31:759–776. doi: 10.1007/s10845-019-01476-x. [DOI] [Google Scholar]
- 22.Lv X, Duan F, Jiang J-J, Fu X, Gan L. Deep metallic surface defect detection: The new benchmark and detection network. Sensors. 2020;20:1562. doi: 10.3390/s20061562. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 23.Xu L, Lv S, Deng Y, Li X. A weakly supervised surface defect detection based on convolutional neural network. IEEE Access. 2020;8:42285–42296. doi: 10.1109/ACCESS.2020.2977821. [DOI] [Google Scholar]
- 24.Li S-B, Yang J, Wang Z, Zhu S-D, Yang G-C. Review of development and application of defect detection technology. Acta Automatica Sinica. 2020;46:2319–2336. [Google Scholar]
- 25.Szegedy, C. et al. Going deeper with convolutions. In Proceedings of the IEEE conference on computer vision and pattern recognition, 1–9 (2015).
- 26.Lin, T.-Y. et al. Feature pyramid networks for object detection. In Proceedings of the IEEE conference on computer vision and pattern recognition, 2117–2125 (2017).
- 27.Liu, S., Qi, L., Qin, H., Shi, J. & Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE conference on computer vision and pattern recognition, 8759–8768 (2018).
- 28.Tan, M., Pang, R. & Quoc, V. L. Efficientdet: Scalable and efficient object detection. arxiv e-prints, page. arXiv preprintarXiv:1911.090702 (2019).