

Abstract
We introduce a mathematical model, based on networks, for the elasticity and plasticity of materials. We define the tension tensor for a periodic graph in a Euclidean space, and we show that the tension tensor expresses elasticity under deformation. Plasticity is induced by local moves on a graph. The graph is described in terms of the weights of edges, and we discuss how these weights affect the plasticity.
Keywords: polymer networks, periodic weighted graphs, discrete harmonic maps
1. Introduction
The field of topological crystallography was initially introduced by Kotani & Sunada [1–5] as a part of discrete geometric analysis. One of the main objects of their study is a net, that is, a periodic graph realized in . The energy of a net is defined as an analogue of the Dirichlet energy of a Riemannian manifold. In other words, one can say that the energy of a net is the total potential energy of springs, viewing edges as linear springs with rest lengths equal to zero. Harmonic and standard nets are defined as energy-minimizing nets under certain conditions, and they are regarded as equilibrium states. Nets have been used as models of crystals.
In this paper, we suggest that the energy of a net induces a model of hyperelastic materials. Here, hyperelasticity is the property from which stress under deformation is derived using an energy density function. To describe the deformation of a net, we introduce the notion of a tension tensor, which is regarded as multivariate energy. Further, a standard net is characterized by the tension tensor. We show that the Cauchy stress tensor is also expressed by the tension tensor. Furthermore, if the graph structure is preserved, the elasticity at the macro-scale is also determined by the tension tensor; otherwise, a departure from elasticity, known as plasticity, occurs. To describe the manner in which the graph structure changes, we consider two types of local moves: contraction and splitting. We define a condition for a local move and introduce two models of deformation concerning plasticity. This enables us to draw the stress–strain curve.
Our model is motivated by the structure of thermoplastic elastomers (TPEs). A TPE is a polymeric material with rubber elasticity and is remoldable at high temperatures. A typical TPE consists of ABA triblock copolymers, in which monomers of types A and B are arranged in a sequence such as . ABA triblock copolymers of a certain type form two domains consisting of monomers A and B. This structure is called microphase separation. We consider a structure such that each component consisting of monomer A is a ball, as shown in figure 1. This is called a spherical structure. The domains consisting of monomers A and B are called hard and soft domains, respectively. The theoretical and numerical treatments of block copolymers are explained in the book by Fredrickson [6], to which we refer the reader for further information.
Figure 1.

A spherical structure formed from ABA triblock copolymers.
In our model, the hard and soft domains correspond to the vertices and edges, respectively. More precisely, a hard domain is a vertex, and a polymer chain in the soft domain is an edge. The endpoints of an edge are the (possibly single) hard domains that contain monomer A of the copolymer. The obtained graph may have loops and multiple edges.
The network structure of polymers induces rubber elasticity. The random motion of polymer chains in the soft domain gives rise to entropic forces. A hard domain functions as a cross-link. In our approximation, we ignore the maximal length of the chain and the interaction between chains. If a chain moves randomly, the tension on the chain is proportional to the distance between the endpoints. This setting is consistent with the definition of the energy of a net. Suppose that the polymers can move freely while preserving the network structure. Additionally, we obtain a harmonic net in equilibrium. Since harmonicity is preserved by affine deformation, the affine assumption in the classical theory of rubber elasticity holds. Additional details of rubber elasticity are provided in the book by Treloar [7].
The hard domains of a TPE are less robust than the cross-links of vulcanized rubber because each hard domain is aggregated by intermolecular forces. The network structure of a TPE may change under deformation, as observed in simulation [8,9] and by conducting experiments [10]. For example, a hard domain may split, as shown in figure 2. Further, a loop may become a non-loop edge between the new domains. Conversely, two hard domains may contract. These moves cause plasticity. Although other moves may occur, we consider only contractions and splittings.
Figure 2.

Splitting of a hard domain. In this example, one loop becomes a non-loop edge between the new domains.
In §2, we give preliminary definitions of nets. The graphs we use are weighted, and their weights can be regarded as the number of edges. Different types of polymers may contribute different weights.
In §3, we introduce the tension tensor. This is visualized by an ellipsoid.
In §4, we consider the elasticity of nets under deformation. Based on a physical argument, the Cauchy stress tensor is derived from the tension tensor. We also consider the stress under uniaxial extension. Young’s modulus of a standard net is determined by the energy per unit volume.
In §5, we define local moves. The contraction of two vertices is a natural operation. A splitting of a vertex is an inverse operation of contraction. The sum of weights is preserved in our model. The conditions for the occurrence of these moves are provided by the realization of a graph. The local tension tensor is used to determine whether a vertex splits or not. We suspend the physical validity of the conditions.
In §6, we introduce two models we call fast and slow deformations. Although these models reflect the dependence on the speed of deformation, we consider only the two extreme cases. Subsequently, we obtain the stress–strain curve, which is merely piecewise continuous. We suppose that the local moves under deformation finish in finitely many times. For example, after a vertex splits, the inverse contraction should not occur immediately. We show only a sufficient condition to avoid such repetitions.
Section 7 is devoted to mathematical results. In there, we consider the extent to which the weight of an edge affects the harmonic realization. For the sake of theoretical consideration, we allow weights to be non-negative real numbers and continuously deformed. When the weight of an edge in a harmonic net becomes large, the limit of nets is obtained by the contraction of this edge. In theorem 7.2, we show a mathematical result on the relation between the edge length and the difference of the tension tensor. Moreover, in theorem 7.6 we obtain a lower bound for the edge length.
In §8, we define the number called the energy loss ratio to measure the plasticity of nets. This provides an estimate of the permanent strain for uniaxial tension. We observe simple examples, which suggest the following:
-
(i)
a material has lower plasticity if the proportion of loops is large;
-
(ii)
a material with lower plasticity is obtained by blending two materials.
Continuous deformation of weights highlights these tendencies.
In §9, we give examples of deformation. We use a periodic graph obtained from the hexagonal lattice. The nets obtained by deformation depend on the stretching direction.
2. Definitions
Based on the formulation in [3,5], we prepare some notions in topological crystallography. Let be an (abstract) weighted graph, which is defined by the vertex set and the edge set with maps , and such that , , and for any . The maps and associate the origin and the terminal of an edge, respectively. The map reverses the orientation of an edge. We allow a loop (edge such that ) and a multi-edge (edges with common terminal points). The weight function satisfies for . We regard the weight of an edge as the number of edges. Hence, we may replace an edge with the union of edges and if , and . The weight function is often omitted in the notation. The degree of a vertex is defined by . Note that the weight of a loop contributes twice to the degree of its endpoint.
A graph is a finite graph if and are finite sets. Otherwise, is an infinite graph. We can naturally identify with a one-dimensional complex. Note that two elements and in correspond to a single 1-cell in the complex. We may reduce the complex by removing the zero-weight edges. If this reduced complex is connected, we say that the graph is connected.
We consider an infinite connected graph . For , suppose that acts on as (weight-preserving) automorphisms of the graph, the quotient map is a covering, and is a finite graph. Then, we say that is a periodic graph, and is a period lattice for . A map is called a periodic realization of in if there exists an injective homomorphism as -modules satisfying that
-
(i)
for any and , and
-
(ii)
is a lattice subgroup of .
Condition (i) means that is -equivariant. We call and , respectively, the period homomorphism and the period lattice for .
Definition 2.1. —
The pair is called as a net in if is a periodic realization of a periodic graph in .
A periodic realization maps an edge to a vector
in . Since for , we obtain by . We often write instead of by abuse of notation. If is a loop, then .
We define the energy of a net and consider energy-minimizing realizations. Note that our definition of the energy is slightly different from that in [5, §7.4], where the energy normalized by the volume is defined.
Definition 2.2. —
The energy (per period) of a net is defined as follows:
In other words, when we regard edges as springs, the energy is two times the total potential energy of linear springs with rest length equal to zero and elasticity constant given by the edge weight. Note that we count the segment between points and twice in the summation, as edges from to and from to .
Definition 2.3. —
A periodic realization of is called harmonic if the energy is minimal among the periodic realizations of with the fixed period homomorphism . Then, we call a harmonic net.
Definition 2.4. —
A periodic realization of is called standard if the energy is minimal among the periodic realizations of with the fixed covolume . Then, we call a standard net.
Remark that when , there exists a volume-preserving linear transformation satisfying . Therefore, a periodic realization is standard if its energy is minimal among its volume-preserving linear transformations.
Clearly, a standard realization is harmonic. A harmonic realization is characterized by a local condition. We characterize a standard realization in §3.
Theorem 2.5. ([5] theorem 7.3) —
A periodic realization is harmonic if and only if for any .
From this theorem, it directly follows that a linear transformation of a harmonic representation is also harmonic.
Corollary 2.6. —
Suppose that is a periodic realization and is a linear transformation Then the composition is a harmonic realization if and only if is harmonic.
Remark 2.7. —
One might think that in definition 2.2, the rest lengths of the springs should be positive, not zero. However, we have assumed the rest lengths to be zero for two reasons. The first reason is due to statistical mechanics. A chain in a TPE is not taut like a helical spring, but it fills space randomly. Therefore, the tension on the chain is proportional to the distance between the endpoints. The second reason is a mathematical one. We will transform harmonic nets by continuous linear transformations in the following sections. However, in order for the result of any linear transformation to be harmonic again, the natural length of the spring must be zero (see corollary 2.6).
Remark 2.8. —
In this paper, we use the term ‘net’ as a periodically realized network in . In the book of Wells [11], who initiated a systematic study of crystal structures as networks, a connected simple periodic graph with straight edges in a Euclidean space was called a net, and we follow this convention. Note that in the terminology of [5], a net is called a topological crystal.
3. Tension tensor
In our mathematical model, a net represents the structure of TPE chains. Consider the tension caused by the structure. Indeed, a stretched TPE must have tension in the direction in which the structure is stretched. For example, the net in figure 3 has a symmetric shape. Thus, it has no tension in any direction. By contrast, the net in figure 4 seems to be stretched from the top right to the bottom left. However, what can we say about a more complicated net such as that in figure 5?
Figure 3.
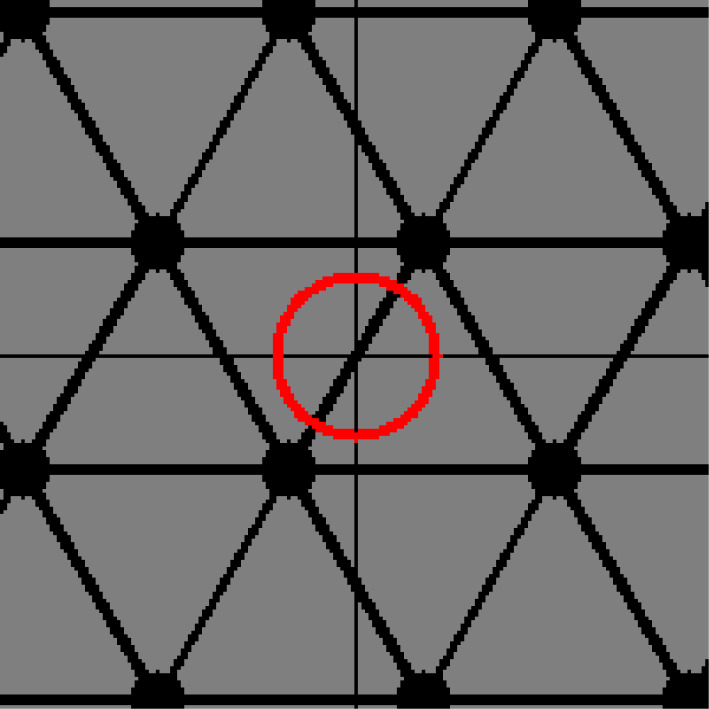
A symmetric net with tension ellipse. (Online version in colour.)
Figure 4.
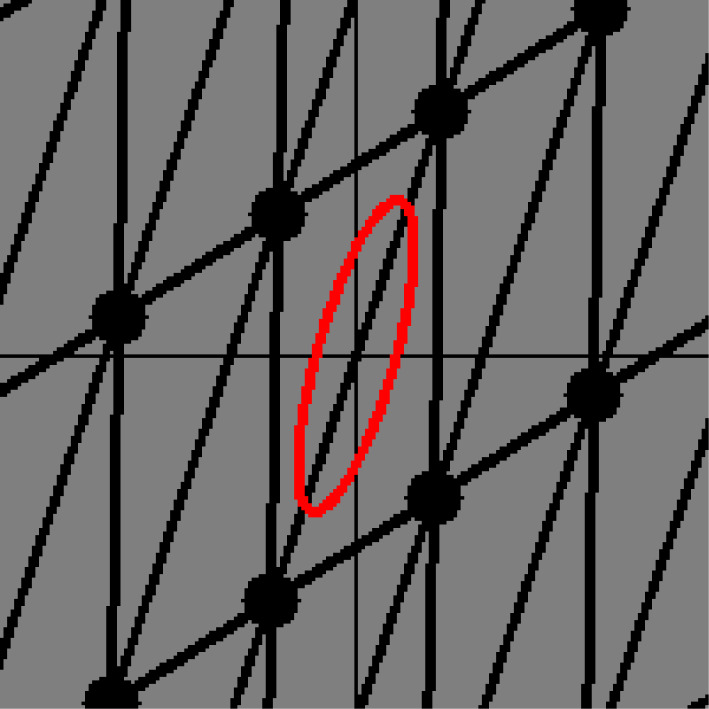
A stretched net with tension ellipse. (Online version in colour.)
Figure 5.
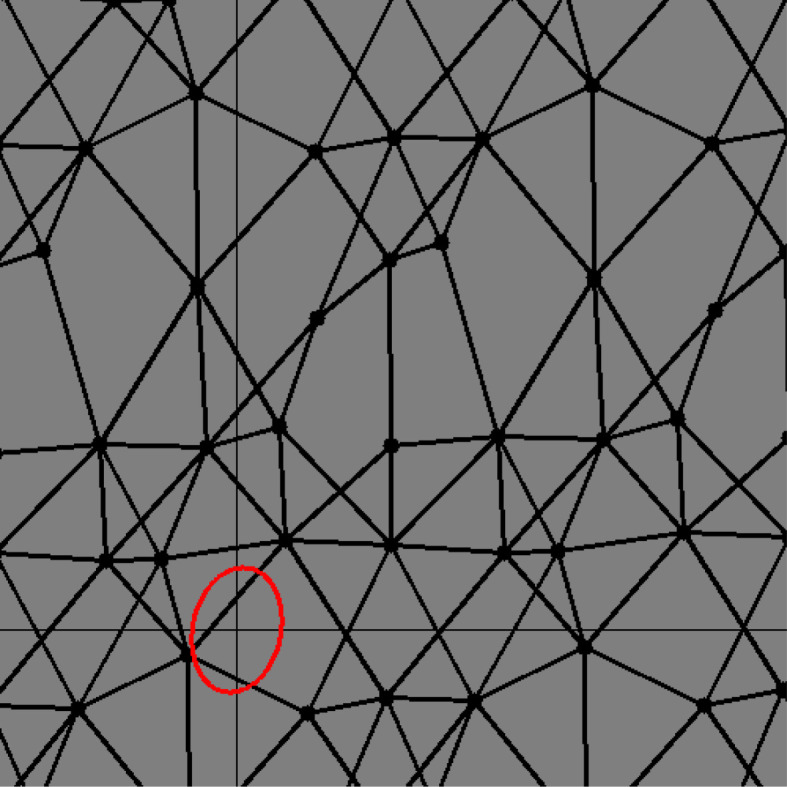
A complicated net with tension ellipse. (Online version in colour.)
To answer this question, we introduce a matrix named a tension tensor. Essentially, the tension tensor denotes the energy of a net with information of the direction along which the net is stretched, or its ‘directed energy’. We will observe that the tension tensor can be visualized as an ellipse (or ellipsoid), such as the ellipses in figures 3–5.
Through computer simulation for the deformation of two-dimensional nets, we make the following observations:
-
(i)
when we stretch a net and the graph structure does not experience any change, the ellipse of the tension tensor also stretches in the same direction; and
-
(ii)
when the graph structure changes, the ellipse of the tension tensor becomes round.
The former immediately follows from the definition. The latter can be verified by theorem 7.2.
(a) . Definition of the tension tensor
Definition 3.1. —
For a net , we define the local and global tension tensors as follows: For a vertex of or , the local tension tensor is defined by
where
The global tension tensor (per period) is defined by
Proposition 3.2. —
It holds that .
Proof. —
Note that two elements are distinguished.
The following characterization of a standard realization follows from ([5], Theorem 7.5).
Theorem 3.3. —
A periodic realization is standard if and only if it is harmonic and the global tension tensor is a constant multiple of the identity matrix.
Consequently, a standard realization is unique up to similar transformations. The existence and explicit constructions of a standard realization were also shown previously [3,5].
We remark that the global tension tensor per period depends on the choice of period. Suppose that is a finite index sublattice of , and is the tension tensor with respect to the lattice . Then
To avoid this ambiguity, we can define the tension tensor per weight by
However, in most parts of this paper, we assume that the covolumes of period lattices are constant, and we use the tension tensor per period without the ambiguity.
(b) . Linear action and visualization
Let . The matrix acts on a net by
Since for , it follows that , where and are the transposes of and , respectively. In particular, if is a symmetric matrix, then .
To visualize the tension tensor, we define an ellipsoid by
We remark that we use the tension tensor per weight here to avoid ambiguity. It is easy to check that .
4. Stress
In this section, we consider the stress experienced by a net by using the tension tensor. Fix a periodic graph . Let be a harmonic realization of . We regard the energy as physical energy. This is interpreted as the Helmholtz free energy for entropic elasticity. With a three-dimensional object in mind, we give an obvious generalization to the -dimensional version. (See [12] for the classical theory on continuum mechanics.)
As a result, the stress satisfies the neo-Hookean model, which is the simplest one among the hyperelastic materials. This also coincides with the consequence of the classical theory on rubber elasticity by Kuhn (see [7], ch. 4). Note that his setting is not identical to ours. Although polymers are normally distributed in his theory, the net in our setting is not isotropic. Nonetheless, a standard net has isotropy at the macro-scale.
(a) . Stress tensor
By compositing rotational isometry, we may assume that the tension tensor per period is a diagonal matrix . Then, the energy per period is . Let denote the volume per period.
We apply a physical argument to define stress for nets. Let us consider a macro-scale object of which the shape is an orthotope (-cuboid) of edge length in each th direction for . Suppose that this object consists of a net at the micro-scale. We apply the affine deformation assumption ([7], ch. 4) (or the Cauchy–Born rule [13]). In other words, if the macro-scale object undergoes an affine deformation, the net at the micro-scale undergoes the same affine deformation. Then, the total energy is equal to . Suppose that external force extends outward in each th direction, and the object remains in equilibrium. Then, the stress in the th direction is . Consider infinitesimal deformation of the object. For a short while, we allow the volume to vary but let be constant. Let denote the displacement in the th direction. The strain in the th direction is . Then, the work is , which is equal to the difference of energies . Hence, . The difference of the tension tensor is given by
modulo the order more than one. Hence, . Therefore,
If we can vary freely, we obtain . Thus, we define the Cauchy stress tensor for a net as , which is valid in general coordinates.
Furthermore, we suppose that the deformation preserves the volume. In other words, and are constant. Since , we have . If we vary under this condition, the equation implies that for some constant . Indeed, uniform pressure does not change the shape under the constraint of volume. Thus, the traceless part of the Cauchy stress tensor is regarded as the volume-preserving part. This is called the deviatoric stress tensor.
If the external forces are equal to zero, then . Hence, the deviatoric stress tensor is zero. Since , theorem 3.3 implies that is a standard realization.
A material is hyperelastic (or Green elastic) if the stress under deformation is determined by a strain energy density function. In our setting, consider the affine deformation of a standard net by the diagonal matrix
The strain energy density function is given by
A material with such a strain energy density function is called incompressible neo-Hookean.
(b) . Uniaxial extension
Consider a harmonic net . For the sake of the argument in §8, first let be not necessarily standard. We write , which is not necessarily diagonal, in contrast to the previous subsection. For , the diagonal matrix
induces a uniaxial extension with strain . The volume per period is constant under deformation. Consider the tension tensor after deformation. A stress tensor in the volume-preserving setting is given by for some . By considering the nature of uniaxial extension, we suppose that . However, it does not hold that in general. Then,
The true stress under this uniaxial extension is defined by
The engineering stress (or nominal stress) is measured using the cross-sectional area before deformation, and it is defined by .
Proposition 4.1. —
Let . Then
Proof. —
Since , we have
The permanent strain is the number satisfying . The following equality is clear from the definition of .
Proposition 4.2. —
It holds that
Consider the case in which is standard. Then, . Moreover, we have , which is natural for uniaxial extension. The true stress is given by
The engineering stress is given by
Then, Young’s modulus for a standard net is defined by
5. Local moves
We introduce three local moves for nets: contraction and splitting. A local move for a graph is an operation to obtain a new graph by replacing some vertices and edges. When we say that we replace an edge with , we simultaneously replace with in our notation. For a periodic graph, a local move is regarded as an equivariant operation preserving the period. Even though local moves are defined as operations for abstract graphs, the conditions under which they occur are given by realizations of nets.
(a) . Contraction of two vertices
Let be an (abstract) graph, and let , . We construct a new graph as follows: We define and . Let denote the projection such that and the restriction is the identity map. We define the endpoint maps . Suppose that the weight function on is identical to that on . We call this operation the contraction of and to . This contraction causes the edges and to change into the loop on , where is the loop on , and is the edge between and (figure 6). Then, the sum of weights is preserved.
Figure 6.

Contraction of two vertices.
For a periodic graph with period , we define a contraction as an equivariant operation. In other words, we apply the contraction of and for each . In this case, it is necessary that for any . As a result, we obtain a new periodic graph .
To introduce deformation in §6, we define a condition for contraction using a realization of the graph . Fix a constant . If , then we suppose that the vertices and contract.
Note that the weight may be zero. Even in this case, the vertices and contract if their distance is sufficiently small.
(b) . Splitting of a vertex
A splitting of a vertex is an inverse operation of contraction. This is not determined only by the vertex. When a vertex splits, the loop on changes the loops on and and the edge between them. Although the sum of weights is preserved, the choice of the three weights is not unique. We also need to assign an endpoint or for each new edge corresponding to an edge originating from . Note that there may not necessarily exist loops on the vertex . If there exist no loops on , there exist no edges between the new vertices and .
For a periodic graph , we define a splitting as an equivariant operation to obtain a new periodic graph . We remark that vertices and for may be adjacent. Even in this case, we can still define a splitting as such. By ignoring the period, we apply successive splittings of and . Note that the sequence of splittings in any order yields the same result.
We define a condition for splitting using a realization of the graph :
-
(i)
when a vertex splits;
-
(ii)
the way in which the edges originating from are divided into two classes; and
-
(iii)
the way in which the weights are assigned.
Fix constants for . The value is regarded as the firmness of a vertex with degree . Recall that is the map induced by , and is the local tension tensor around . Let denote the maximal eigenvalue of . Take an eigenvector associated with . We divide the edges originating from into two classes and so that and . If , then we suppose that the vertex splits. This may be regarded as the maximal principal stress criterion. The new edge corresponding to originates from . Roughly speaking, the splitting occurs in the stretched direction.
To obtain the unique division into two classes and , we need the following condition of genericity:
-
(i)
the eigenspace associated with is the one-dimensional space , and
-
(ii)
there are no edges such that .
Because it is difficult to decide how the weights are assigned, we use an ad hoc setting: suppose that and are, respectively, the loops on and . Moreover, suppose that is the edge between and . Fix the probabilities , and that the loop on changes into the new edges , and . In other words, , , and . Although the choice of , and may be arbitrary, it is reasonable to set and . The reason is that the above choice holds if each endpoint of a new edge is with a probability of .
For a realization of a graph , suppose that a graph is obtained by splitting a vertex into and . Then, we define the immediate realization of (or by abuse of notation) as follows: , and for any other vertex . If is a periodic realization, then is equivariantly defined as a periodic realization. Using this, we can show that splitting decreases the energy.
Proposition 5.1. —
Suppose that is a graph obtained from as a result of splitting under the above condition. Let be a harmonic realization of with the same period as . Then, .
Proof. —
Clearly, . The condition of splitting and theorem 2.5 imply that is not harmonic. Hence, by definition 2.3.
Remark 5.2. —
In the above two subsections, the graph obtained by the local move is well defined. However, the realization of should be defined using harmonicity, so there remains ambiguity of parallel translation.
In this paper, it does not matter because we only consider the shape of the realized graph and its energy. However, if one wants to discuss such as the displacements of nodes before and after a local move, this ambiguity should be removed. One idea is to assume that the centre of mass of the periodic cell is fixed.
6. Models of deformation
We introduce two models: fast and slow deformation. The difference of these two models reflects the strain rate sensitivity, that is, the dependency of stress on the speed of deformation. A harmonic realization of a periodic graph is regarded as an equilibrium state. Let be a standard net with period homomorphism as an initial condition. This is regarded as a state without external force, as explained in §4. In this section, we express the period homomorphisms explicitly. Suppose that the initial net does not satisfy any condition of a contraction or splitting. Deformation is obtained by linear transformations with constant volume. We apply contractions and splittings that satisfy the conditions in §5 for harmonic nets in deformation. Because the process is not deterministic in general, it is necessary to choose one that satisfies the conditions. We leave the stochastic formulation for future work.
(a) . Fast deformation
Let . Fix the period homomorphism . We apply local moves for the harmonic net . First, we apply the splittings. Then, we obtain a new harmonic net. If the conditions of other local moves hold, we continue to apply the splittings. Second, we apply the contractions. However, more than two vertices may contract to a point. In general, we need to choose the contracting vertices so that the contraction does not violate the period.
We continue this procedure by supposing that these procedures finish with finitely many local moves. In the end, we obtain a harmonic net . We call this process fast deformation.
(b) . Slow deformation
Slow deformation is a limit of sequences of fast deformation. For a continuous family of linear transformations, take approximations by discrete families of small ones. They induce sequences of fast deformation. We obtain slow deformation by the limit as the approximations get arbitrarily fine.
Equivalently and more precisely, slow deformation is defined as follows. Suppose that for is a continuous family of linear transformations such that . Let . We apply local moves while increasing from zero to one. Let be the minimal such that the condition of a local move holds for the harmonic net . We obtain a graph by the local move. Consider a harmonic net . Note that another local move may occur for . Then, we continue to apply local moves. Subsequently, we obtain a harmonic net .
After the exhaustion of local moves for , we increase . Let be the minimal more than such that the condition of a local move holds for the harmonic net . Using the same argument as above, we obtain a harmonic net .
We continue this procedure by supposing that these procedures finish with finitely many local moves. Ultimately, we obtain a harmonic net . We call this process slow deformation.
A condition of genericity is given as follows:
-
(i)
two local moves do not occur simultaneously, and
-
(ii)
two vertices equivalent by the period do not contract.
If the net is highly symmetric, the genericity is difficult to hold. For genericity, we arbitrarily choose a single local move at a time, and we ignore any contraction that violates the period.
We define the stress–strain curve for a uniaxial extension. Let
The slow deformation by for induces a net . The energy is a right-continuous function of . We can plot the stress–strain curve as a graph of the engineering stress as a function of the strain , where ) by proposition 4.1.
(c) . Compatibility of splitting and contraction
We suppose that the above procedures in deformation finish with finitely many local moves. In general, splittings and contractions may cause an infinite sequence of local moves. We give only a partial result for this problem.
Let be a harmonic net. Let be a periodic graph obtained from by splitting a vertex into and with respect to the condition given in §5. The maximal eigenvalue of the local tension tensor is equal to . Let denote the new non-loop edge in . Let be the weight of , which does not exceed the weight of the loop on . We consider a harmonic realization with the same period lattice as . If , then splittings and contractions continue alternately. We show that such repetition does not occur if is sufficiently small.
Theorem 6.1. —
Suppose that the weights are non-negative integers. Then,
Proof. —
Let be an auxiliary periodic realization of such that , for any vertex (), and is harmonic around . Then, , which we show in theorem 7.6. Hence, it is sufficient to show that
Indeed, since , we may assume that by interchanging and if necessary.
Let for denote the non-loop edges of originating from other than , and let denote their terminals. Note that we may ignore the edges between and for . Let be the weight of . The same symbol is used for the corresponding edges and vertices of . We write . We may assume that and the splitting occurs in the direction of the first coordinate; that is, the vector is an eigenvector associated with the maximal eigenvalue of the local tension tensor around . Then, , , , and . Since is harmonic around , we have
Hence,
Moreover, we obtain by lemma 6.2 and the assumption that .
Lemma 6.2. —
Let and . Suppose that and . Then, .
Proof. —
We find the maximum for a fixed . If is fixed for , then the maximum of is attained when or . Hence, the maximum of is attained when and for some and , and for the other . Therefore, .
7. Variation of weights
In this section, we consider the extent to which the harmonic realizations and their energies depend on the weights, which vary in non-negative real numbers. We describe a contraction as the limit by increasing the weight of an edge. Note that we do not suppose that the sum of weights is preserved, which differs from the assumption in §5.
Let be a periodic graph with period . We take representatives of the set . Let denote the edge from to for . Then, are representatives of the set . Let denote the weight of . Then, .
Fix a period homomorphism . Suppose that . Let be a periodic graph obtained from by the contraction of and to a vertex . Suppose that and are harmonic realizations of and , respectively. We may assume that . We change the harmonic realizations by varying while fixing the other weights on . Here, we regard as a single variable. Suppose that is connected, that is, the union of its edges with positive weights is connected. Since the harmonic realization is given by the unique solution of a system of linear equations, it depends continuously on . After we show that can be regarded as , we give explicit presentations.
Lemma 7.1. —
The realizations converge to as . In other words, converge to for each , and converge to . In particular, . Consequently,
Proof. —
Consider a (not necessarily harmonic) periodic realization of . We write and for . Then, . By theorem 2.5, the realization is harmonic if and only if
7.1 for any and . Let be a solution of this system of equations, which is unique up to translations. We may assume that . Then, . We write , for , , and . Using the matrix , the system of linear equations is written as . Since and are unique, we have , where is a minor of . Then, is invertible. Cramer’s rule implies that , where is the matrix obtained by replacing the th column of with . In this presentation of , only contains . (Note that .) Hence, and are linear functions of . Moreover, is constant for .
Since is harmonic, we obtain by regarding as a realization of . Moreover, we have . Hence, . In other words, . If is constant for , then is also constant. Hence, . Then, , and the assertion holds trivially.
Suppose that is not constant for . Then, converges as . We define the realization of such that and for . Since and is harmonic, the realization is also harmonic. The uniqueness of a harmonic realization implies that . Therefore, .
Theorem 7.2. —
There are and such that
and
where and do not depend on , and does not depend on . Consequently,
Proof. —
We showed that in the proof of lemma 7.1. The determinants and are, respectively, linear and constant as functions of . If is constant for , then , and we obtain . We can take arbitrarily.
Suppose that is not constant for . Then, we can write , where , and does not depend on or . Let and . Then,
Moreover, does not depend on .
We regard the tension tensor as a function of and . Its -entry is given by
Then,
Consider as a function of , where . By the equality (7.1), we have . Hence,
where we regard as a single variable. Hence, for some independent of . Since by lemma 7.1, we have
Lemma 7.3. —
Let the vector and the number be as in theorem 7.2. Suppose that . Then,
Proof. —
Since
for any , we have .
As in the proof of theorem 7.2, we have , where , for , , and . Then,
by lemma 7.4. Since is positive definite by lemma 7.5 and , so is . Therefore, . Note that if , we conventionally set and .
Lemma 7.4. —
Let be a symmetric matrix. Suppose that is invertible. Then
Proof. —
Using the adjugate matrix, we have
where . The cofactor expansion implies that
Lemma 7.5. —
Let be a symmetric matrix. Suppose that for any and for any . Then, is positive semi-definite.
Proof. —
The proof is by induction on . The assertion is trivial for the case . We have
where
and
The matrix is positive semi-definite by the assumption of induction for . Therefore, is also positive semi-definite.
Theorem 7.6. —
Let be a realization of such that for any and is harmonic around . Then, .
Proof. —
Since is harmonic around and , we have
Hence,
Let
and
Then, . The difference of energies is given by
Since is harmonic, we have . Lemma 7.3 implies that . Therefore,
by theorem 7.2.
8. Plasticity
The plasticity of a material is its ability to undergo permanent deformation. For a fixed periodic graph, no external force is applied to a net if and only if its realization is standard, as shown in §4. Hence, if no local moves occur in the deformation of a net, then it returns to its initial state by unloading, and it is perfectly elastic. In general, however, local moves cause plasticity. To measure plasticity, we introduce the energy loss ratio of a net under deformation. This is defined by comparing the energy with that of a net in which local moves do not occur.
Definition 8.1. —
Let be a harmonic net in . Let us consider fast deformation by or slow deformation by for . Suppose that we obtain a harmonic net as in §6. We define the energy loss ratio of with respect to or as
If no local moves occur, then . We may regard the ratio as a degree of destruction. Note that may be negative by some occurrence of contractions.
Consider the uniaxial extension by
and . The permanent strain was defined in §4, by setting as the reference position.
Proposition 8.2. —
Suppose that is standard, no contractions occur in the deformation, and . Then, the permanent strain satisfies that
Approximations
hold when . One might expect that for , but it does not generally hold, because the directions of deformation and splittings do not necessarily coincide.
Proof. —
Write , and . Then, , , and . Since only splittings occur, we have for each by theorem 7.2. Hence,
Proposition 4.2 implies that
Since , we have . Since and , we have
Therefore,
In the remainder of this section, we consider the simplest case of splitting; let be a periodic graph such that only a single vertex exists in each period. We identify each with a vertex of . Let denote the edge of joining and . We write for the weight of . It is necessary that . Let be a period homomorphism, and let be a basis of . The period homomorphism induces a periodic realization of such that the image of vertices is . For , the edge corresponds to . Then, is a harmonic realization. Let such that . Let be a periodic graph obtained from by splitting the vertex into and so that and are endpoints of for and , respectively, where is an edge of obtained from . We write for the weight of the new non-loop edge. Let be a harmonic realization of with the period homomorphism . We may assume that . Let .
For , let and . If , the vertices split in the direction of . Subsequently, it is possible to regard the net as a result of slow deformation. However, we do not require this assumption unless otherwise stated.
After we show general behaviour, we give some examples of the energy loss ratio depending on the weights .
Proposition 8.3. —
It holds that
and
Proof. —
The condition of harmonic realization implies the presentation of . We have , and in the notation of theorem 7.2. Thus, we obtain the presentation of .
We remark that coincides with in theorem 7.6. Moreover, attains the maximum in lemma 7.3.
By way of example, we suppose that the weights are given by a function of the lengths of edges.
Theorem 8.4. —
Let be a non-negative function on such that . Put for . Suppose that the sum is convergent. Let , which is regarded as the probability that a loop changes into a non-loop edge. Suppose that there is such that . Then, the energy loss ratio satisfies
where we suppose that the three integrals are finite. Moreover, if and , then for any fixed .
By the second assertion, we may understand that the material has lower plasticity if the proportion of loops is large.
Proof. —
Since for all but finitely many , the sums and are absolutely convergent. The volume per period is given by . By proposition 8.3,
Hence,
where the Riemann sums converge to the Riemann integrals.
Suppose that , and . Since , we have
For example, we use the normal distribution, given by the function for and . Then,
and for . Note that constant multiples of the weights do not change the energy loss ratio . Generally, if the function for each fixed monotonically decreases for and , then .
Next, we consider the weight functions given by the linear sums for . The weight function for each induces the energy
and the energy loss ratio by proposition 8.3, where
and
We consider the way in which depends on the compounding ratio . Since and , we have
Proposition 8.5. —
Suppose that . Then
The equality holds if and only if and the vectors and are parallel. For fixed and , the minimum of is attained when
We may understand that a material with lower plasticity is obtained by blending two materials. Note that if for , the vectors and are likely to be nearly parallel to .
Proof. —
It is easy to check the presentation of . The inequality follows from
where the first inequality is the Cauchy–Schwarz inequality, and the second follows from . An easy calculation shows that
increases for and decreases for .
We remark that the linear sums of weights with different energy loss ratios do not yield smaller ratios in general. For instance, the linear sums of and as in proposition 8.5 give the energy loss ratios between and .
Under the assumption that , we have
and
where . If or is large, then is nearly equal to zero.
For example, we consider the cube lattice. Suppose that is the standard basis of . For , let , for any , and for the other . Let and . Then, , , , , and . Since , we have . Consequently, and .
We give another example by using the linear sums of normal distributions. Suppose that for and . Fix . Theorem 8.4 implies that
It attains the minimum when . Hence, , , and . We remark that and .
9. Examples of deformation
In this section, we give examples of deformation for two-dimensional nets. Let
We consider a uniaxial extension with strain in the direction of an angle from the horizontal axis, namely, the slow deformation by .
For the splitting of a vertex into and , let , and , respectively, denote the loops on and the non-loop edge between and . Suppose that the weight function satisfies and .
Let denote the periodic graph after the th local move, and let be a harmonic realization of . Suppose that is standard, and all the period homomorphisms for are common. We write . The engineering stress is . The permanent strain is the number satisfying . The energy loss ratio is .
(a) . Hexagonal lattice
Let be a periodic graph of which the edges consist of loops and the 1-skeleton of the hexagonal tiling. We assume that the period is minimal. Let and be the weights of each loop and non-loop edge, respectively. A standard realization of is given as follows (figure 7):
-
(i)
for , the vectors and form a basis of the lattice;
-
(ii)
representatives and of the vertices are mapped to and ; and
-
(iii)
The non-loop edges and originating from are mapped to and .
Figure 7.

The hexagonal lattice.
Then, the volume per period is . The energy per period is . Young’s modulus is . The tension tensors around the vertex and are .
(i) . The case
Consider the slow deformation by for . Then,
Suppose that . When , the edge contracts to a loop, where no splittings occurred earlier. We obtain a periodic graph as shown in figure 8. The edges of consist of loops with weight and the 1-skeleton of the square tiling. Then,
and
Furthermore, when , the vertices of split. We obtain a periodic graph as shown in figure 9. The weights of each loop and new non-loop edge are, respectively, and . Then,
(The first equality is also obtained by theorem 7.2.) It holds that . If , then . We remark that decreases as increases.
Figure 8.

The graph .
Figure 9.

The graph .
Furthermore, when , vertices of split. For genericity, we suppose that a single vertex per period splits. (We may assume that a representative thereof is at the origin.) We obtain a periodic graph as shown in figure 10. Then,
It holds that . If , then .
Figure 10.

The graph .
Similarly, more splittings of vertices may occur. Subsequently, the length of a path of edges increases. For , the energies are shown in figure 11, and the stress–strain curve is drawn as the thick discontinuous curve in figure 12. Note that if we take a larger period, the occurrences of local moves change by genericity. We must also consider a contraction when . With this consideration, the stress–strain curve also changes. It would be desirable for these stress–strain curves to converge to a continuous curve as the periods expand.
Figure 11.

Energies for deformation in the case .
Figure 12.
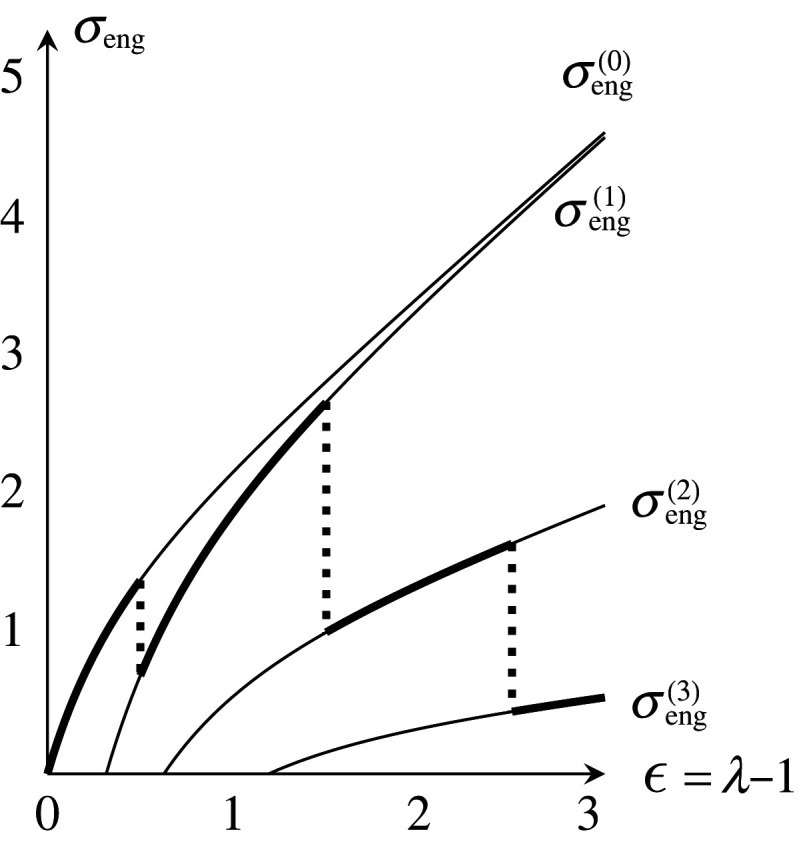
Stress–strain curve in the case
(ii) . The case
Consider the slow deformation by for . Then, only splittings occur. We state only a result:
and so on. For , the energies are shown in figure 13, and the stress–strain curve is shown in figure 14.
Figure 13.

Energies for deformation in the case
Figure 14.

Stress–strain curve in the case
10. Discussion and perspectives
We discuss some open issues and propose questions for further research.
-
(1)
The definition of the tension tensor fits with our purely mathematical interest, and we can apply it to topological and discrete geometric properties of graphs and nets. To define an energy, we have used as an energy of an edge of length . What happens when we take another energy function ? A linear transformation of a harmonic realization is no longer harmonic, but a harmonic realization is still unique if and .
-
(2)
In §5, we have arbitrarily given the threshold values and in the conditions of a contraction and a splitting. What are the values and for an actual TPE? How does the value depend on the degree ?
-
(3)
The validity of our model for deformation requires the assumption that infinite repetition of local moves does not occur. However, mutually inverse splittings and contractions may continue alternatingly in some cases. Theorem 6.1 gives a sufficient condition that such alternating repetition does not occur. Is another kind of infinite repetition possible? If it is possible, what condition is sufficient to avoid such repetition?
-
(4)
In §9, we have given simple examples for two-dimensional nets. What about three-dimensional nets?
-
(5)
Do local moves occur in unloading? If not, then it reproduces the Mullins effect [14]: the stress–strain curve in reloading coincides with that in the unloading until the maximal strain of the prior loading. Figures 12 and 14 illustrate this behaviour. Even if local moves occur in unloading, the inverse local moves in reloading may induce the Mullins effect.
-
(6)
We have worked in continuous weights of edges, which is useful for mathematical arguments. Of course, the weights corresponding to actual polymers are integers. However, it would not be meaningful only to restrict ourselves to integer weights. Our presented settings preserve periodicity. As a result, stress–strain curves are not continuous. To obtain a continuum limit of such discrete matters, stochastic formulation of local moves will be effective. The stochastic formulation in integer weights may induce continuous stress–strain curves and a nonlinear constitutive equation that reflects elastoplasticity. We expect that this is also appropriate to describe fracture of materials.
Acknowledgements
The authors are grateful to Yoshifumi Amamoto, Tetsuo Deguchi, Ken Kojio, Motoko Kotani, Hiroshi Morita, Ken Nakajima, Genki Omori and Koya Shimokawa for their helpful discussions. The authors would like to thank Editage (www.editage.com) for English language editing, and the anonymous reviewers for their suggestions and comments.
Data accessibility
This article has no additional data.
Authors' contributions
K.Y. and H.K.: conceptualization, formal analysis, methodology, visualization, writing—original draft, writing—review and editing.
Both authors gave final approval for publication and agreed to be held accountable for the work performed therein.
Conflict of interest declaration
We declare we have no competing interests.
Funding
This study is supported by JST CREST grant no. JPMJCR17J4. The first author is also supported by the World Premier International Research Center Initiative (WPI), MEXT, Japan. The second author is also supported by JSPS KAKENHI grant no. 19K14530.
References
- 1.Kotani M, Sunada T. 2000. Albanese maps and off diagonal long time asymptotics for the heat kernel. Commun. Math. Phys. 209, 633-670. ( 10.1007/s002200050033) [DOI] [Google Scholar]
- 2.Kotani M, Sunada T. 2000. Jacobian tori associated with a finite graph and its Abelian covering graphs. Adv. Appl. Math. 24, 89-110. ( 10.1006/aama.1999.0672) [DOI] [Google Scholar]
- 3.Kotani M, Sunada T. 2001. Standard realizations of crystal lattices via harmonic maps. Trans. Am. Math. Soc. 353, 1-20. ( 10.1090/S0002-9947-00-02632-5) [DOI] [Google Scholar]
- 4.Kotani M, Sunada T. 2003. Spectral geometry of crystal lattices. Contemp. Math. 338, 271-306. [Google Scholar]
- 5.Sunada T. 2012. Topological crystallography: with a view towards discrete geometric analysis, vol. 6. Surveys and Tutorials in the Applied Mathematical Sciences. Berlin, Germany: Springer. [Google Scholar]
- 6.Fredrickson GH. 2006. The equilibrium theory of inhomogeneous polymers, vol. 134. International Series of Monographs on Physics. Oxford, UK: Oxford University Press. [Google Scholar]
- 7.Treloar LRG. 1975. The physics of rubber elasticity. Oxford, UK: Oxford University Press. [Google Scholar]
- 8.Aoyagi T, Honda T, Doi M. 2002. Microstructural study of mechanical properties of the ABA triblock copolymer using self-consistent field and molecular dynamics. J. Chem. Phys. 117, 8153-8161. ( 10.1063/1.1510728) [DOI] [Google Scholar]
- 9.Morita H, Miyamoto A, Kotani M. 2020. Recoverably and destructively deformed domain structures in elongation process of thermoplastic elastomer analyzed by graph theory. Polymer 188, 122098. ( 10.1016/j.polymer.2019.122098) [DOI] [Google Scholar]
- 10.Liu H, Liang X, Nakajima K. 2020. Direct visualization of a strain-induced dynamic stress network in a SEBS thermoplastic elastomer with in situ AFM nanomechanics. Jpn J. Appl. Phys. 59, SN1013. ( 10.35848/1347-4065/ab948a) [DOI] [Google Scholar]
- 11.Wells AF. 1977. Three-dimensional Nets and Polyhedra. Wiley monographs in crystallography. New York, NY: Wiley-Interscience. [Google Scholar]
- 12.Gurtin ME. 1981. An introduction to continuum mechanics. New York, NY: Academic Press. [Google Scholar]
- 13.Ericksen JL. 2008. On the Cauchy–Born rule. Math. Mech. Solids 13, 199-220. ( 10.1177/1081286507086898) [DOI] [Google Scholar]
- 14.Diani J, Fayolle B, Gilormini P. 2009. A review on the Mullins effect. Eur. Polym. J. 45, 601-612. ( 10.1016/j.eurpolymj.2008.11.017) [DOI] [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.
Data Availability Statement
This article has no additional data.