

Abstract
目的
系统评价机器人辅助与传统人工全髋关节置换术(total hip arthroplasty,THA)术后下肢长度差异(leg length discrepancy,LLD)。
方法
计算机检索The Cochrane Library、PubMed、Web of Science、EMbase、CNKI、万方、维普、CBM数据库,搜集机器人辅助与传统THA比较的队列研究,检索时限均从建库至2021年8月11日。由2名研究者独立筛选文献、提取资料并评价纳入研究的偏倚风险后,使用RevMan 5.3软件进行Meta分析。
结果
共纳入10个高质量队列研究。Meta分析结果表明:与传统THA相比,机器人辅助THA术后LLD更小 [MD=−1.64,95%CI(−2.25,−1.04),P<0.001],术后3、12个月Harris评分更高 [MD=1.50,95%CI(0.44,2.57),P=0.006;MD=7.60,95%CI(2.51,12.68),P=0.003];但手术时间更长 [MD=8.36,95%CI(4.56,12.17),P<0.000 1],术后髋臼前倾角更大 [MD=1.91,95%CI(1.43,2.40),P<0.001]。两组术后6个月Harris评分、关节遗忘度评分(FJS)以及术后髋臼外展角、并发症发生率差异无统计学意义(P>0.05)。
结论
机器人辅助THA在术后LLD方面优于传统THA。
Keywords: 机器人辅助系统, 人工全髋关节置换术, Meta分析, 系统评价, 队列研究
Abstract
Objective
To systematically evaluate the difference in leg length discrepancy (LLD) between robot-assisted total hip arthroplasty (THA) and traditional THA.
Methods
The Cochrane Library, PubMed, Web of Science, EMbase, CNKI, Wanfang, VIP, and CBM databases were searched by computer to collect cohort studies of robot-assisted and traditional THAs from inception to August 11th, 2021. Two researchers independently screened the literature, extracted the data, and evaluated the risk of bias of the included studies. Meta-analysis was performed using RevMan 5.3 software.
Results
A total of 10 high-quality cohort studies were included. The results of Meta-analysis showed that compared with traditional THA, LLD after robot-assisted THA was smaller [MD=−1.64, 95%CI (−2.25, −1.04),P<0.001], Harris scores at 3 and 12 months after operation were higher [MD=1.50, 95%CI (0.44, 2.57), P=0.006; MD=7.60, 95%CI (2.51, 12.68), P=0.003]. However, the operative time was longer [MD=8.36, 95%CI (4.56, 12.17), P<0.000 1], and the postoperative acetabular anteversion angle was larger [MD=1.91, 95%CI (1.43, 2.40), P<0.001]. There was no significant difference in Harris score at 6 months, amnesia index (Forgotten joint score, FJS), postoperative acetabular abduction angle, and incidence of complication between the two groups (P>0.05).
Conclusion
Robot-assisted THA is superior to traditional THA in postoperative LLD.
Keywords: Robot assist system, total hip arthroplasty, Meta-analysis, systematic review, cohort study
人工全髋关节置换术(total hip arthroplasty,THA)是临床治疗终末期髋关节疾患的主要方法[1]。下肢长度差异(leg length discrepancy,LLD)是置换术后常见并发症之一,会导致术后严重坐骨神经损伤、腰痛、步态异常,严重影响患者对疗效的满意程度[2-5]。研究表明,即使LLD很小,在行走和站立时也会导致肢体负荷不对称,随时间推移,可能造成严重的骨骼与肌肉问题[6]。近年,机器人辅助手术技术在THA中的应用逐渐增加,以期提高手术准确性、缩小术后LLD,但临床应用发现其与传统THA相比无显著差异。考虑到使用机器人手术带来的额外经济负担,临床对于是否在THA中使用机器人辅助存在争议。本研究根据PRISMA声明[7]采用Meta分析方法,分析机器人辅助与传统THA术后LLD,以期为临床实践提供参考。
1. 资料与方法
1.1. 纳入与排除标准
1.1.1. 研究类型
队列研究。
1.1.2. 研究对象
接受THA的终末期髋关节疾病患者。
1.1.3. 暴露因素
暴露组:机器人辅助下THA;非暴露组:传统THA。
1.1.4. 结局指标
主要结局指标:术后LLD;次要结局指标:手术时间、术后Harris评分、术后关节遗忘度评分(FJS)、术后西安大略和麦克马斯特大学骨关节炎指数评分(WOMAC)、术后髋臼外展角、术后髋臼前倾角、术后并发症发生率。
1.1.5. 排除标准
无对照组、数据缺失、个案、综述、会议论文。
1.2. 文献检索策略
计算机检索The Cochrane Library、PubMed、Web of Science、EMbase、CNKI、万方、维普和CBM数据库,搜索国内外有关机器人辅助或传统THA研究文献,检索时限均从建库至2021年8月11日。中文检索词包括:关节成形术、置换、髋、全髋关节置换术、人工全髋置换术、全髋关节成形术、全髋置换术、人工全髋关节置换、机器人辅助、传统方法、机器人、辅助;英文检索词包括:Arthroplasty、Replacement、Hip、Hip prosthesis implantation、Hip prosthesis implantations、Hip replacement arthroplasty、Hip replacement arthroplasties、Total hip replacement、Total hip arthroplasty、Robot-assisted、Robotics、Robot、Traditional、Conventional。以PubMed检索为例,其具体检索策略见框1。同时通过文献阅读等其他方式获取相关文献。
图 k1.

1.3. 文献筛选和资料提取
由第一作者和通信作者在Endnote X9软件中独立筛选文献、提取数据并交叉核对。如有分歧,则进行数据复查,直至提取数据结果一致。资料提取内容:① 纳入研究基本信息:研究题目、第一作者、发表年、研究类型、国家;② 研究对象基线特征;③ 评价偏倚风险的关键要素;④ 所关注的结局指标和结果测量数据。
1.4. 纳入研究的偏倚风险评估
本文纳入的文献均为队列研究,使用纽卡斯尔-渥太华量表(NOS)[8]进行文章质量评价。评价指标包括研究人群选择、组间可比性和结局测量,满分为 9 分,≥7分为高质量,5~6分为中等质量,<5分为低质量。
1.5. 统计分析
使用 RevMan 5.3 软件进行 Meta 分析。纳入研究结果间的异质性采用Q检验进行分析(检验水准α=0.1),同时结合I2定量判定异质性大小。如各研究结果间无统计学异质性,使用固定效应模型进行Meta分析;如各研究结果间存在统计学异质性,进一步分析异质性来源,排除明显临床异质性影响后,采用随机效应模型进行Meta分析。Meta分析水准设为α=0.05。若存在明显临床异质性可以进行亚组分析或敏感性分析,或只进行描述性分析。使用漏斗图评估发表偏倚。
2. 结果
2.1. 文献筛选流程及结果
从纳入的8个数据库中初检提取765篇文献,经逐层筛选后,最终纳入10个研究进行分析。文献筛选流程及结果见图1。
图 1.
Literature screening process and results
文献筛选流程及结果
*所检索的数据库及检出文献数具体如下:PubMed(n=55)、The Cochrane Library (n=41)、EMbase(n=103)、Web of Science (n=305)、CBM(n=16)、万方(n=55)、CNKI(n=167)、维普(n=23)

2.2. 纳入研究的基本特征与偏倚风险评价结果
表 1.
Basic information of included studies
纳入研究的基本特征
| 纳入研究 | 国家 | 例数
(T/C,例) |
平均年龄
(T/C,岁) |
性别(男/女,例) | 手术方式(T/C) | 平均身体质量指数(T/C,kg/m2) | 随访时间
(月) |
结局指标 | |
| T | C | ||||||||
| T:暴露组;C:非暴露组;−:未提及;① 术后 LLD;② 手术时间;③ 术后 Harris 评分;④ 术后 FJS 评分;⑤ 术后髋臼外展角;⑥ 术
后髋臼前倾角;⑦ 术后 WOMAC 评分;⑧ 术后并发症发生率 | |||||||||
| 李俊成2021[9] | 中国 | 38/38 | 53.5/52.3 | 18/20 | 19/19 | Mako机器人辅助THA/
传统THA |
26.2/25.7 | 3.4±3.9 | ①②③④⑧ |
| 崔可赜2020[10] | 中国 | 35/35 | 72.4/74.1 | 21/14 | 19/16 | Mako机器人辅助THA/
传统THA |
24.1/22.9 | 6~18 | ①②③④⑤⑥⑧ |
| 郭人文 2020[11] | 中国 | 23/23 | 52.8/51.3 | 16/7 | 14/9 | Mako机器人辅助THA/
传统THA |
24.8/25.2 | 12 | ①②③④⑤⑥⑦⑧ |
| Kong 2020[12] | 中国 | 86/100 | 51.9/51.9 | − | − | Mako机器人辅助THA/
传统THA |
24.9/24.2 | 3 | ①②③⑤⑥⑧ |
| Domb 2020[13] | 美国 | 66/66 | 59.0/57.7 | 24/42 | 25/41 | Mako机器人辅助THA/
传统THA |
29.2/28.7 | 60 | ①③⑤⑥⑧ |
| Kayani 2021[14] | 英国 | 50/50 | 67.1/68.5 | 27/23 | 25/25 | Mako机器人辅助THA/
传统THA |
25.8/26.1 | 3 | ①②⑧ |
| Bargar 2018[15] | 美国 | 45/22 | − | 35/10 | 12/10 | Mako机器人辅助THA/
传统THA |
28.3/29.4 | 168 | ③⑦ |
| Domb 2014[16] | 美国 | 50/50 | 56.8/56.7 | 19/31 | 19/31 | Mako机器人辅助THA/
传统THA |
28.3/28.7 | − | ②⑤⑥ |
| Nakamura 2010[17] | 日本 | 69/61 | 57/58 | 13/56 | 10/51 | 加利福尼亚州Integrated
Surgical Systems辅助 THA/传统THA |
23/24 | 67 | ①②⑧ |
| Honl 2003[18] | 德国 | 61/80 | 71.5/70.7 | 24/37 | 24/56 | 加利福尼亚州Integrated
Surgical Systems辅助 THA/传统THA |
− | 6 | ③ |
表 2.
Risk of bias assessment results of included studies
纳入研究的偏倚风险评价结果
| 纳入研究 | 研究人群选择 | 组间可比性 | 结局测量 | 总分 | |||||||
| ① | ② | ③ | ④ | ⑤ | ⑥ | ⑦ | ⑧ | ||||
| 条目:① 暴露组的代表性;② 非暴露组的选择;③ 暴露因素的确定;④ 确定研究起始时间时尚无要观察的结局指标;⑤ 设计和统计分析时考虑暴露组和未暴露组的可比性;⑥ 研究对于结果的评价是否充分;⑦ 结果发生后随访时间是否足够长;⑧ 暴露组和非暴露组的随访是否充分 | |||||||||||
| 李俊成2021[9] | 1 | 1 | 1 | 0 | 2 | 1 | 1 | 1 | 8 | ||
| 崔可赜2020[10] | 1 | 1 | 1 | 0 | 2 | 1 | 1 | 1 | 8 | ||
| 郭人文 2020[11] | 1 | 1 | 1 | 0 | 2 | 1 | 1 | 1 | 8 | ||
| Kong 2020[12] | 1 | 1 | 1 | 0 | 2 | 1 | 0 | 1 | 7 | ||
| Domb 2020[13] | 1 | 1 | 1 | 0 | 2 | 1 | 1 | 1 | 8 | ||
| Kayani 2021[14] | 1 | 1 | 1 | 0 | 2 | 1 | 0 | 1 | 7 | ||
| Bargar 2018[15] | 1 | 1 | 1 | 0 | 2 | 1 | 1 | 1 | 8 | ||
| Domb 2014[16] | 1 | 1 | 1 | 0 | 2 | 1 | 0 | 1 | 7 | ||
| Nakamura 2010[17] | 1 | 1 | 1 | 0 | 2 | 1 | 1 | 1 | 8 | ||
| Honl 2003[18] | 1 | 1 | 1 | 0 | 2 | 1 | 1 | 1 | 8 | ||
2.3. Meta分析结果
2.3.1. 术后LLD
共纳入7个研究[9-14, 17]。Meta分析结果显示,机器人辅助与传统THA术后LLD差异有统计学意义 [MD=−1.64,95%CI(−2.25,−1.04),P<0.001]。见图2及表3。
图 2.
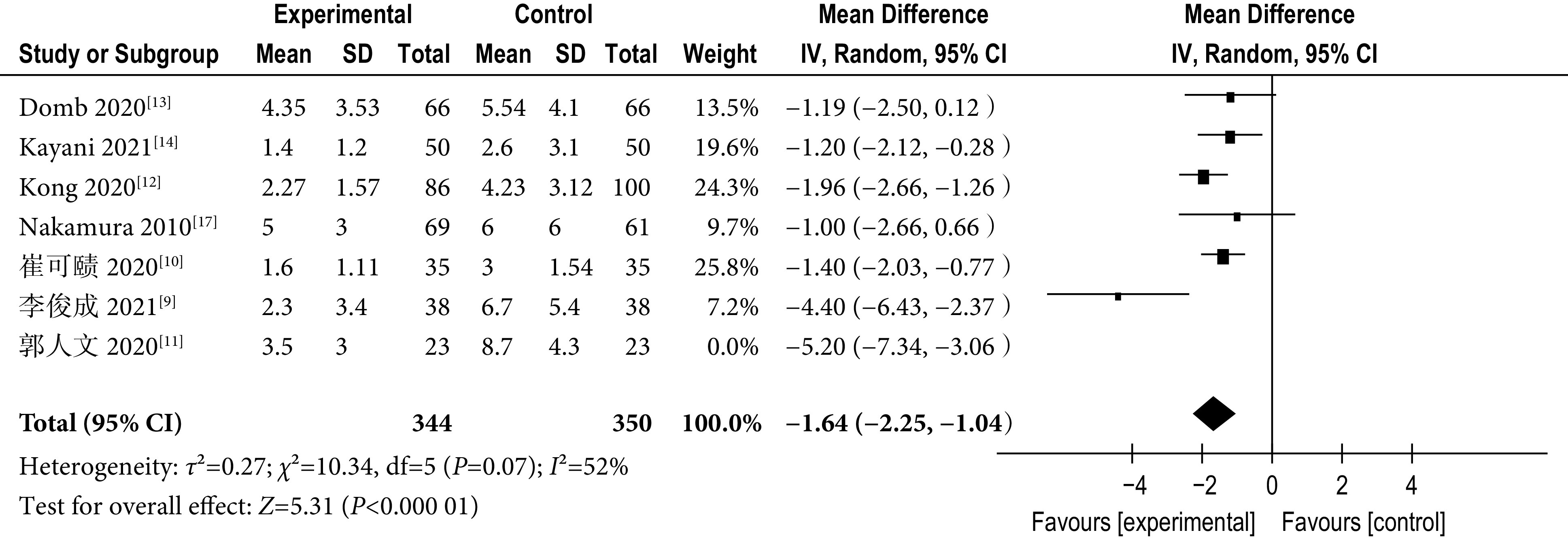
Forest plot of the LLD of both groups after operation
两组术后LLD森林图
表 3.
Meta-analysis results of outcome indicators after robot-assisted THA versus traditional THA
机器人辅助与传统THA术后各指标Meta分析结果
| 结局指标 | 纳入研究数 | 异质性检验结果 | 效应模型 | Meta分析结果 | ||
| P | I 2 | 效应量(95%CI) | P | |||
| 术后LLD | 7[9-14, 17] | 0.07 | 52% | 随机效应模型 | MD=−1.64(−2.25,−1.04) | <0.001 |
| 手术时间 | 7[9-12, 14, 16, 17] | 0.02 | 64% | 随机效应模型 | MD=8.36(4.56, 12.17) | <0.0001 |
| 术后3个月Harris评分 | 3[10, 12, 18] | 0.78 | 0% | 固定效应模型 | MD=1.50(0.44,2.57) | 0.006 |
| 术后6个月Harris评分 | 4[9-11, 18] | 0.37 | 5% | 固定效应模型 | MD=0.83(−0.01,1.66) | 0.05 |
| 术后12个月Harris评分 | 4[11, 13, 15, 18] | 0.06 | 66% | 随机效应模型 | MD=7.60(2.51,12.68) | 0.003 |
| 术后6个月FJS评分 | 3[9-11] | 0.62 | 0% | 固定效应模型 | MD=0.91(−0.68,2.51) | 0.26 |
| 术后髋臼外展角 | 5[10-13, 16] | 0.005 | 76% | 随机效应模型 | MD=−1.13(−2.93,0.67) | 0.22 |
| 术后髋臼前倾角 | 5[10-13, 16] | 0.48 | 0% | 固定效应模型 | MD=1.91(1.43,2.40) | <0.0001 |
| 术后并发症发生率 | 7[9-14, 17] | 0.43 | 0% | 固定效应模型 | RR=0.92(0.54,1.55) | 0.75 |
2.3.2. 手术时间
共纳入7个研究[9-12, 14, 16-17]。Meta分析结果显示,机器人辅助与传统THA手术操作时间差异有统计学意义 [MD=8.36,95%CI(4.56,12.17),P<0.000 1]。见表3。
2.3.3. 术后3个月Harris评分
共纳入3个研究[10, 12, 18]。Meta分析结果显示,机器人辅助与传统THA术后3个月Harris评分差异有统计学意义[MD=1.50,95%CI(0.44,2.57),P=0.006]。见表3。
2.3.4. 术后6个月Harris评分
共纳入4个研究[9-11, 18]。Meta分析结果显示,机器人辅助与传统THA术后6个月Harris评分差异无统计学意义[MD=0.83,95%CI(−0.01,1.66),P=0.05]。见表3。
2.3.5. 术后12个月Harris评分
共纳入4个研究[11, 13, 15, 18]。Meta分析结果显示,机器人辅助与传统THA术后12个月Harris评分差异有统计学意义[MD=7.60,95%CI(2.51,12.68),P=0.003]。见表3。
2.3.6. 术后6个月FJS评分
共纳入3个研究[9-11]。Meta分析结果显示,机器人辅助与传统THA术后6个月FJS评分差异无统计学意义[MD=0.91,95%CI(–0.68,2.51),P=0.26]。见表3。
2.3.7. 术后髋臼外展角
共纳入5个研究[10-13, 16]。Meta分析结果显示,机器人辅助与传统THA术后髋臼外展角差异无统计学意义[MD=−1.13,95%CI(−2.93,0.67),P=0.22]。见表3。
2.3.8. 术后髋臼前倾角
共纳入5个研究[10-13, 16]。Meta分析结果显示,机器人辅助与传统THA术后髋臼前倾角差异有统计学意义[MD=1.91,95%CI(1.43,2.40),P<0.000 1]。见表3。
2.3.9. 术后并发症发生率
共纳入7个研究[9-14, 17]。Meta分析结果显示,THA使用机器人辅助与传统THA术后并发症发生率差异无统计学意义[RR=0.92, 95%CI(0.54,1.55),P=0.75]。见表3。
2.3.10. 术后WOMAC评分
仅1个研究对术后14年WOMAC评分进行分析[15]。机器人辅助THA组WOMAC评分为(8.44±11.48)分,传统THA组为(11.32±11.92)分,两组比较差异有统计学意义(P=0.034)。
2.4. 敏感性分析
异质性分析显示,术后LLD存在统计学异质性(I2=71%,P=0.002),查找异质性的来源剔除1篇文献时异质性下降最明显(I2=52%)[11]。术后3个月Harris评分存在统计学异质性(I2=77%,P=0.01),查找异质性来源剔除1篇文献时异质性下降最明显(I2=0%)[12]。术后12个月Harris评分存在统计学异质性(I2=89%,P<0.001),查找异质性来源剔除1篇文献时异质性下降最明显(I2=66%)[18]。术后髋臼外展角存在统计学异质性(I2=83%,P<0.001),查找异质性来源剔除1篇文献时异质性下降最明显(I2=76%)[10]。
2.5. 发表偏倚评价
以主要结局指标术后LLD以及纳入研究较多的手术时间作漏斗图,提示可能存在发表偏倚。见图3。
图 3.
Funnel plots of publication bias
发表偏倚分析漏斗图
a. 术后LLD;b. 手术时间
a. LLD after operation; b. Operative time

3. 讨论
机器人辅助THA是当今关节外科的研究热点,通过计算机导航实现术前设计、术中监控,可显著提高髋关节假体植入位置的准确性[17],与传统THA相比有效减小了术后LLD,达到双下肢等长目的[19]。单中心研究表明,机器人辅助THA能将术后LLD有效控制在5 mm以内[18-19],这些结果与本次Meta分析结果支持了上述结论。对于手术时间而言,Meta分析结果表明机器人辅助THA手术时间更长,考虑与机器人技术学习曲线长有关。也有研究表明,随着手术量的增多,当手术技术成熟后,机器人辅助THA的手术时间能较使用初期明显下降[20]。对于髋臼前倾角,Meta分析结果表明,机器人辅助THA的术后髋臼前倾角更大,考虑与机器人辅助术前设计髋臼前倾角往往设定值为20° 有关,而传统THA髋臼前倾角大小往往是由术者根据经验决定。同时受髋臼侧磨锉深度和角度的影响,部分患者存在骨质疏松或者局部骨硬化,部分患者髋臼马蹄窝发育不良而较浅,从而使术者不能很好地实现髋臼窝磨锉,影响了前倾角大小。对于髋关节Harris评分,Meta分析结果表明机器人辅助术后3、12个月Harris评分优于传统THA,考虑与机器人辅助THA术中股骨侧截骨、髋臼侧磨锉、假体打入准确性更高,从而减少了反复截骨调整、松解软组织等操作造成髋关节软组织损伤有关。
本研究局限性:① 仅检索了8个常用的中英文数据库,存在遗漏其他语言数据库收录文献可能;② 存在一定报告偏倚,仅对临床关注较多的结局指标进行分析;③ 纳入研究数量较少,且均为队列研究,样本量较小;④ 纳入研究地域不同,包括中国、美国、英国、日本,不同地域的研究对象会造成较大的异质性来源;⑤ 术者THA技术熟练度、假体类型、围术期对患者处理方式不同;⑥ Harris评分、FJS评分等疗效评分记录员不同,也会造成异质性;⑦ 纳入研究的随访时间均较短。
综上述,机器人辅助THA在术后LLD、术后3个月及12个月Harris评分更优于传统THA。但是传统THA手术时间更短,且术后髋臼前倾角更小。由于研究数量和质量有限,上述结论还需更多样本、多中心、长期随访的随机对照试验验证。
利益冲突 在课题研究和文章撰写过程中不存在利益冲突;经费支持没有影响文章观点和对研究数据客观结果的统计分析及其报道
作者贡献声明 涂源源、万大地:研究设计、资料收集及论文撰写;万大地:数据分析;汪群力:资料收集、文章审校
Funding Statement
海南省自然科学基金面上项目(821MS160)
Natural Science Foundation of Hainan Province (821MS160)
References
- 1.Learmonth ID, Young C, Rorabeck C The operation of the century: total hip replacement. Lancet. 2007;370(9597):1508–1519. doi: 10.1016/S0140-6736(07)60457-7. [DOI] [PubMed] [Google Scholar]
- 2.Ng VY, Kean JR, Glassman AH Limb-length discrepancy after hip arthroplasty. J Bone Joint Surg (Am) 2013;95(15):1426–1436. doi: 10.2106/JBJS.L.00433. [DOI] [PubMed] [Google Scholar]
- 3.Edwards BN, Tullos HS, Noble PC Contributory factors and etiology of sciatic nerve palsy in total hip arthroplasty. Clin Orthop Relat Res. 1987;(218):136–141. [PubMed] [Google Scholar]
- 4.Giles LG, Taylor JR Low-back pain associated with leg length inequality. Spine (Phila Pa 1976) 1981;6(5):510–521. doi: 10.1097/00007632-198109000-00014. [DOI] [PubMed] [Google Scholar]
- 5.O'Brien S, Kernohan G, Fitzpatrick C, et al Perception of imposed leg length inequality in normal subjects. Hip Int. 2010;20(4):505–511. doi: 10.1177/112070001002000414. [DOI] [PubMed] [Google Scholar]
- 6.Kim SC, Lim YW, Kwon SY, et al Effect of leg-length discrepancy following total hip arthroplasty on collapse of the contralateral hip in bilateral non-traumatic osteonecrosis of the femoral head. Bone Joint J. 2019;101-B(3):303–310. doi: 10.1302/0301-620X.101B3.BJJ-2018-1053.R1. [DOI] [PubMed] [Google Scholar]
- 7.Moher D, Liberati A, Tetzlaff J, et al. 系统综述和荟萃分析优先报告的条目: PRISMA声明. 中西医结合学报, 2009, 7(9): 889-896.
- 8.曾宪涛, 刘慧, 陈曦, 等 Meta分析系列之四: 观察性研究的质量评价工具. 中国循证心血管医学杂志. 2012;4(4):297–299. doi: 10.3969/j.1674-4055.2012.04.004. [DOI] [Google Scholar]
- 9.李俊成, 倪明, 冀全博, 等 机器人辅助与传统方法行全髋关节置换术后下肢长度差异比较. 中华骨科杂志. 2021;41(8):480–487. doi: 10.3760/cma.j.cn121113-20201215-00731. [DOI] [Google Scholar]
- 10.崔可赜, 郭祥, 陈元良, 等 后外侧入路人工全髋关节置换术中MAKO机器人手臂辅助与传统人工方法的比较研究. 中国修复重建外科杂志. 2020;34(7):883–888. doi: 10.7507/1002-1892.201911077. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 11.郭人文, 柴伟, 李想, 等 机器人辅助在股骨头坏死全髋关节置换术中的应用. 中华骨科杂志. 2020;40(13):819–827. doi: 10.3760/cma.j.cn121113-20190811-00337. [DOI] [Google Scholar]
- 12.Kong X, Yang M, Jerabek S, et al A retrospective study comparing a single surgeon’s experience on manual versus robot-assisted total hip arthroplasty after the learning curve of the latter procedure—A cohort study. Int J Surg. 2020;77:174–180. doi: 10.1016/j.ijsu.2020.03.067. [DOI] [PubMed] [Google Scholar]
- 13.Domb BG, Chen JW, Lall AC, et al Minimum 5-year outcomes of robotic-assisted primary total hip arthroplasty with a nested comparison against manual primary total hip arthroplasty: A propensity score-matched study. J Am Acad Orthop Surg. 2020;28(20):847–856. doi: 10.5435/JAAOS-D-19-00328. [DOI] [PubMed] [Google Scholar]
- 14.Kayani B, Konan S, Huq SS, et al The learning curve of robotic-arm assisted acetabular cup positioning during total hip arthroplasty. Hip Int. 2021;31(3):311–319. doi: 10.1177/1120700019889334. [DOI] [PubMed] [Google Scholar]
- 15.Bargar WL, Parise CA, Hankins A, et al Fourteen year follow-up of randomized clinical trials of active robotic-assisted total hip arthroplasty. J Arthroplasty. 2018;33(3):810–814. doi: 10.1016/j.arth.2017.09.066. [DOI] [PubMed] [Google Scholar]
- 16.Domb BG, El Bitar YF, Sadik AY, et al Comparison of robotic-assisted and conventional acetabular cup placement in THA: a matched-pair controlled study. Clin Orthop Relat Res. 2014;472(1):329–336. doi: 10.1007/s11999-013-3253-7. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 17.Nakamura N, Sugano N, Nishii T, et al A comparison between robotic-assisted and manual implantation of cementless total hip arthroplasty. Clin Orthop Relat Res. 2010;468(4):1072–1081. doi: 10.1007/s11999-009-1158-2. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 18.Honl M, Dierk O, Gauck C, et al Comparison of robotic-assisted and manual implantation of a primary total hip replacement. A prospective study. J Bone Joint Surg (Am) 2003;85(8):1470–1478. doi: 10.2106/00004623-200308000-00007. [DOI] [PubMed] [Google Scholar]
- 19.Manzotti A, Cerveri P, De Momi E, et al Does computer-assisted surgery benefit leg length restoration in total hip replacement? Navigation versus conventional freehand. Int Orthop. 2009;35(1):19–24. doi: 10.1007/s00264-009-0903-1. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 20.Redmond JM, Gupta A, Hammarstedt JE, et al The learning curve associated with robotic-assisted total hip arthroplasty. J Arthroplasty. 2015;30(1):50–54. doi: 10.1016/j.arth.2014.08.003. [DOI] [PubMed] [Google Scholar]