

Graphical abstract

Keywords: Autonomous profiler, Drone-deployment, Hazardous areas, Reusable CTD, Marine terminating glaciers, Arctic research
Abstract
Accelerated melting of ice in Polar Regions due to global warming increases freshwater input to coastal waters from marine terminating glaciers. Lack of measurements near the glacier terminus limits our knowledge of the mixing processes between freshwater and the underlying ocean.
We present a low-cost (< € 3200) and lightweight (2.6 kg) drone-deployed, retrievable conductivity, temperature and depth (CTD) instrument for remote controlled (1 km) autonomous profiling in highly hazardous and remote areas. The instrument was deployed with a drone taking off from land and marine vessels to perform measurements near tidewater glaciers termini of the Greenland ice sheet.
The free-flowing profiler is reusable due to a compact ballast based single-shot buoyancy engine and post-profiling pickup by drone. It can reach a depth of up to 250 m, and is equipped with low-cost sensors for conductivity, temperature, and depth measurements.
During decent the profiler reaches a velocity of about 0.48 m/s, resulting in about 3.5 data points pr. m depth, but is designed to easily vary the velocity by changing buoyancy setup before deployment.
Successful tests were conducted at marine terminating glaciers in Northeast Greenland in August 2021.
Specifications table
| Hardware name | Arctic Research Centre Torpedo (ARC-TOP) |
|---|---|
| Subject area | Environmental, planetary and agricultural sciences |
| Hardware type | Field measurements and sensors |
| Closest commercial analog | Lockheed Martin XCTD Profiling System |
| Open source license | CC BY 4.0 |
| Cost of hardware | € 3200 |
| Source file repository | https://doi.org/10.17632/zdvb5hzv2x.1 |
Hardware in context
The rapid warming of the Planet has triggered an increasing interest in understanding melting of the Greenland ice sheet and its glaciers that floats into the ocean as it affects ocean circulation and the global sea level rise. At present it is not clear how warm ocean water reaches the tidewater glaciers or how and where meltwater is released into the fjord. Only few measurements in very close proximity to glacier termini have been made due to the risk of glacier calving. Previous measurement have used expendable CTD’s (XCTDs) from Sippican, Inc., deployed from helicopters [1], [2]. XCTDs are single-use profilers that decent at a known velocity, while transmitting measured conductivity and temperature to a receiver through wire. When the wire is fully extended, the wire breaks and the profiler is lost. Measurements by this method is severely limited by the cost of equipment replacement and helicopter hire.
The Jetyak, an unmanned surface vehicles (USV) with traditional CTDs have also been used previously [2], [3]. This remote controlled USV deploy a CTD by a winch system and represent a cost-effective alternative to XCTDs. However, this method is limited by access to the glacier termini when significant ice mélange is present.
The use of unmanned aerial vehicles (UAVs) to replace helicopters and USVs for CTD deployment have recently become viable options due to the rapid development of cheap and available hardware and software. A strict weight requirement is imposed on airborne equipment, why a low-cost, lightweight, and easy remote deployable instrument is needed to improve the economic and technical feasibility of glacier-ocean interaction studies.
Hardware description
Evaluation of existing products and later development work revolved around the requirements outlined in Table 1. Given the highly specialized requirements, no commercial or open-source product were found to fulfil these to an acceptable degree.
Table 1.
Product requirements and whether or not they are fulfilled by ARC-TOP.
| Product requirement | Value/specification | Achieved? | |
|---|---|---|---|
| 1. Usage | Deployment | From land and small marine vessel | Yes |
| Handling | 2 persons | Yes | |
| Operation | Autonomous profiling | Yes | |
| Reusability | > 50 deployments | Yes – Ballast is consumed | |
| Remote deployment distance | 1 km | Yes | |
| Remote retrieve distance | 1 km | Yes | |
| Communication | Wireless bi-directional transmission | Yes | |
| Broadcast position and health | 1 km | No − 500 m achieved | |
| 2. Transport | Shipping | Fit on EUR-pallet (1200x800 mm) | Yes |
| Battery | Below 100 Wh | Yes | |
| Weight | Max 15 kg | Yes | |
| 3. Environment | Air temperature | −25 to 30 °C | Yes |
| Water temperature | −5 to 10 °C | Yes | |
| Wave tolerant | Calm weather, <1 m | Yes | |
| Ice tolerant | Operation in conditions with light ice mélange | Not tested | |
| Plume | Profiling within 10 m of SDG plume centre | Not tested | |
| 4. Design | Dimensions | Max 1100x200x200 mm | Yes |
| Deployment weight | Max 5 kg | Yes – 2.6 kg | |
| Measured parameters | Conductivity (C), Temperature (T), Depth (D)1 | Yes | |
| Measurement resolution | Min. 3 measurements per m | Yes | |
| Max depth | 250 m | Yes | |
| Temperature acc. | 0.1 °C | Yes | |
| Depth acc. | 0.5 m | Yes | |
| Conductivity acc. | 0.1 mS/cm | Yes | |
| Position acc. | 10 m | Yes | |
| Price | Max € 4000 | Yes | |
| Colour | High visibility | Yes |
Depth, , is a derived parameter from pressure, , measurement using the equation: , where is the water density and is the gravitational constant. The current software does not correct for density variations due to changes in salinity.
Development resulted in the ARC-TOP shown in Fig. 1 and Fig. 2, a compact and lightweight CTD with low-cost sensors, capable of UAV deployment and retrieval. The total weight ready for deployment is 2.6 kg. To reduce costs, the use of machined parts were kept at an absolute minimum. This led to a flooded design, where only the bare minimum of components are located inside the aluminium pressure hull, while the majority of the structure consist of 3D-printed sections for flow optimization. This reduces the size and weight of the profiler, with an increase in reparability, ease of configuration for other sensors/use-cases and speed of development.
Fig. 1.

ARC-TOP with rough dimensions in mm (left) and the ARC-TOP with ballast and arms deployed (right). Photo courtesy of Peter Bondo Christensen.
Fig. 2.

ARC-TOP mounted on UAV during testing in Isfjord in NE Greenland. Photo courtesy of Søren Rysgaard.
The profiler is designed to be mounted underneath any suitable size UAV with available connections for three external servos. In hover at low altitude ( 1 m), the profiler is dropped, and upon submerging, begins autonomous operation. Due to the use of a ballast-based buoyancy engine, the profiler descends while logging conductivity, temperature and pressure. At a user configurable depth the ballast is dropped and the profiler thus achieves net positive buoyancy, resulting in ascent. Upon returning to the surface, the profiler broadcasts its position and deploys arms for subsequent pick-up. See Fig. 3 for an operating concept visualization.
Fig. 3.

Operational concept of ARC-TOP consisting of setup and arming (1) flight to deployment position at glacier termini (2) drop and dive to set depth (3) ballast release and ascent (4) deployment of pick-up arms and position broadcast at surface (5) pick-up by UAV (6) return flight (7) and instrument retrieval and disarming (8).
Main advantages of the ARC-TOP design is:
-
•Ocean profiling in hazardous areas fx
-
oClose proximity to glacier termini
-
oWaters with high risk of marine vessels running aground
-
oInaccessibility due to terrain
-
o
-
•
Cost-efficient measurements from marine vessels
-
•
Land based costal profiling
Furthermore, the ARC-TOP can be used with a winch as a traditional CTD without hardware modifications.
Hull
The ARC-TOP profiler is divided into three main hull sections as shown in Fig. 1:
-
•
Top hull
-
•
Pressure hull
-
•
Bottom hull
The top and bottom hull are 3D printed by consumer FDM printers in PETG plastic. We have chosen the bright yellow colour for visibility. Ø3 mm carbon fibre rods are bonded to the 3D printed parts, providing strength and mechanical interfaces between the hulls. The pressure hull is machined from EN AW-6082 aluminium.
Top hull
The top hull serves as a mounting point for antennas. These are mounted on the very top of the profiler to ensure optimal signal strength upon resurfacing. The top hull also houses the buoyancy foam in an adjustable compartment to adjust the descent velocity.
The pick-up system is also housed in the top hull along with its release mechanism.
Pressure hull
The aluminium pressure hull houses all instrument electronics excluding sensors and antennas and provides waterproof interfaces for external components. It is designed for dives to a depth of 400 m at a safety factor of 1.3 determined using finite element analysis. Mechanical testing of the pressure hull and sensors have been limited to 250 m.
Three parts make up the pressure hull: Top endcap, cylindrical hull and bottom endcap. We use a double O-ring seal between endcaps and the cylindrical hull. The endcaps have mounting points for the Ø3 mm carbon fibre rods from the top and bottom hulls. A setscrew is used to secure the rods. See Fig. 4.
Fig. 4.

Exploded view of the structural components of the pressure hull.
All three parts of the pressure hull are anodized with a surface thickness of 25 µm. We use a zinc anode on each endcap to provide further protection. Prior to mounting the zinc anode, the anodized surface of contact was sanded down to improve electrical contact between endcap and anode.
Holes in the endcaps provide interfaces for cable penetrators and other equipment. Both Blue Robotics Potted Cable Penetrator [4] and Blue Trail Engineering Simple Penetrator [5] is installed on the instrument. The Potted Cable Penetrator have been potted with WEST SYSTEM G/Flex 650 Toughened Epoxy [6]. Like the hull, these cable penetrators have been tested to a depth of 250 m.
Bottom hull
The CTD sensors are housed in the bottom hull, with conductivity and temperature sensors protruding out of the hull for adequate flow speed over the sensing elements. Ballast is mounted to the exterior of the bottom hull, with the release mechanism.
A flexible nose is connected to the bottom hull to provide impact resistance as well as durability during handling the instrument.
Stability
The layout of the hulls has been designed with consideration of the instrument stability during profiling. This is achieved by having a spatial separation between the Centre of Buoyancy (CoB) and Centre of Gravity (CoG) during both descent (with ballast) and ascent (without ballast). See Fig. 5.
Fig. 5.

Separation of Center of Gravity and Center of Buoyancy during dive (top) and ascent (bottom). Dimensions in mm.
Buoyancy foam
We use closed cell polyurethane foam to achieve net positive buoyancy without ballast installed [7]. When coated with a waterproof coating (epoxy, latex) this foam provides buoyancy at depths up to 488 m [8].
Fine-tuning the buoyancy of the instrument (i.e. setting the descent/ascent velocity) is possible by using foam discs of varying thickness. The discs are easy to swap out for other thicknesses, and a variable-size compartment have been incorporated into the top hull.
Buoyancy engine
Changing buoyancy is accomplished by releasing a set of ballast weights. Each ballast weight consists of an Ø20 mm steel rod with a weight in water of 0.2 kg, totalling a change in weight of 0.4 kg at release. When installing the ballast weights, two foam blocks are compressed to provide the releasing force. The actuator provides the retention force until release. With the imposed weight restrictions on the instrument, a very lightweight and simple actuator has been developed. The actuator is designed to be submerged with no sealants and lubrication.
A locking mechanism provides the retention force until the actuator introduces a small amount of slack. See Fig. 6. A cylindrical heating element cast in a Polyurethane casing accomplishes actuation by heating an Ø2.8 mm Polycaprolactone (PCL) rod with a melting temperature of approximately 60 °C. The PCL rod elongates when heated and the locking mechanism is unlocked. A section view of the heating element is shown in Fig. 7.
Fig. 6.
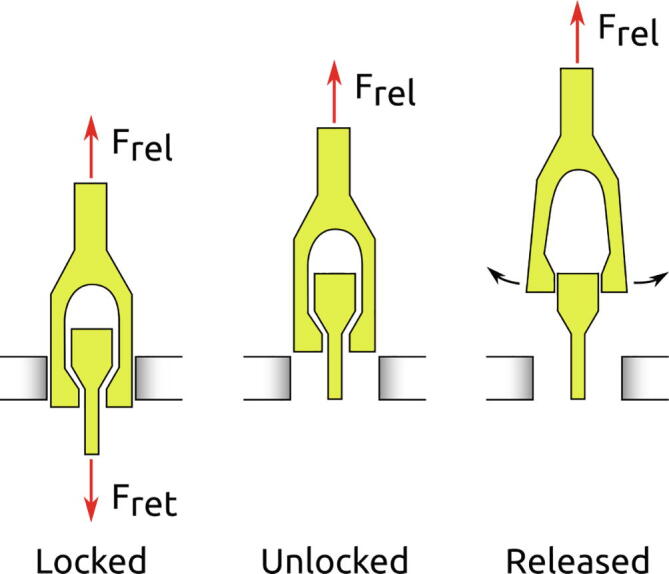
Actuator principle. The retention force (Fret) locks the fork between the walls (grey). With the elimination of the retention force, the releasing force (Frel) pulls the fork out of the walls and releases it.
Fig. 7.
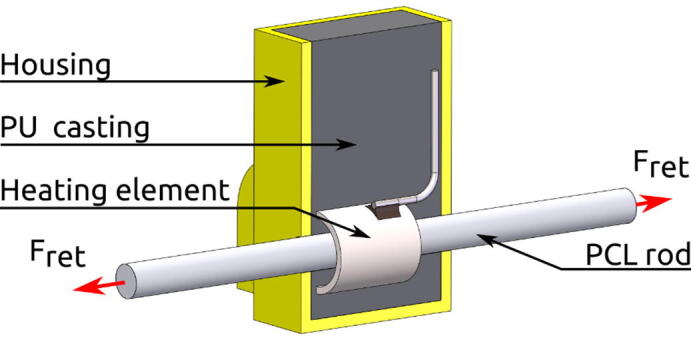
Section view of complete heating element with PCL rod inserted.
The heating element has a Temperature Coefficient of Resistance (TCR) of 1000 ± 150 ppm/°C. This enables deriving the heating element temperature, , during use by measuring current and applied voltage (i.e. resistance, ) by eq. (1):
| (1) |
where and , are temperature and resistance at calibration, respectively.
The known temperature is used to throttle the heating element by means of PWM signals according to a PID controller to reach a set temperature.
Pick-up
The pick-up system consists of two positive buoyant arms with a closed loop paracord connected to the pressure hull suspended between the arms, as seen in Fig. 8. When ready for deployment, the arms and paracord are fixed to the outside of the top hull by a release mechanism identical to the one used in the buoyancy engine. When deployed the arms float to the surface and extend the paracord between them. A foam block provides durable separation of the arms when extended. This creates a loop that can be caught by a hook mounted to a UAV.
Fig. 8.

Pick-up arms and wire system for instrument retrieval (left) and wire system position in water (right). The yellow wire is attached to the pressure hull and forms a closed loop that runs through the pick-up arms. Photo courtesy of Peter Bondo Christensen. (For interpretation of the references to colour in this figure legend, the reader is referred to the web version of this article.)
A small wire coupler provides the necessary hardware to mount the ARC-TOP to a winch for non-remote measurement.
Power
The ARC-COP is powered by a single battery pack of four 18650 LiPo battery cells [9] in series, resulting in a final rating of 14.8 V and 3000 mAh with 30 A XT30 power connectors. The complete battery pack can be seen in Fig. 9. The cells are spot-welded together and soldered to a common port 20 A Li-ion battery management system (BMS) for cell balancing and protection. To create a rugged package a 3d-printed housing is incorporated into the pack. To reduce the risk of accidental shorts of the battery pack, the entire pack is covered using heat-shrink tubing.
Fig. 9.

The complete battery pack covered in heat shrink tubing. Photo courtesy of Peter Bondo Christensen.
Sensors and hardware
The essential sensors (conductivity, temperature and pressure) are listed in Table 2. These have been chosen primarily due to their low cost. The CTD sensors sample at a frequency of 1.7 Hz. This is limited only by the Atlas conductivity sensor.
Table 2.
Main sensor description.
| Sensor | Description | Rated accuracy |
|---|---|---|
| Temperature | The Blue Robotics Celsius [10] sensor is used to measure temperature in the range −5 °C to 50 °C. The sensing element is incorporated into a convenient housing requiring no user potting. | ± 0.1 °C |
| Pressure | The Blue Robotics Bar30 [11] sensor is used to measure pressure to calculate the instrument depth in water. The sensor range is 0 to 30 bar. The sensing element is incorporated into a convenient housing requiring no user potting. | ± 200 mbar |
| Conductivity | The Atlas Scientific Mini Conductivity Probe K 1.0 and EZO Conductivity Circuit [12], [13] is used to measure conductivity to calculate salinity. The probe range is 5–200,000 μS/cm. | ± 1 % |
Table 3 provides a description of additional hardware components. Fig. 10 shows all major components and their individual relationships.
Table 3.
Hardware description.
| Hardware | Description |
|---|---|
| CPU | The Teensy 4.1 development board [14] constitutes the processing unit of the ARC-TOP. This board is compatible with the Arduino software ecosystem [15], enabling rapid development. It has increased processing power, a larger number of interfaces for peripheral devices and a very compact form-factor compared to common Arduino models as well as an on-board Real Time Clock (RTC). |
| Telemetry | Telemetry between instrument and ground station uses RFM98W 433 MHz transceiver modules [16] that uses the LoRa modulation technique [17] for low power long range communication. |
| Data storage | A SD card is used along with the built-in Micro SD Socket on the Teensy 4.1 as data logging with the RTC providing timestamps. System debug and event information are also stored here for later review. |
| Indicator | A Blue Robotics Subsea LED Indicator [18] functions as status indication on the top endcap. |
| Voltage and current sensor | The Adafruit INA260 voltage and current sensor [19] is used to monitor battery voltage and current applied to the heating elements, as described in section Buoyancy engine. |
| Leakage sensor | The Blue Robotics SOS Leak Sensor [20] and SOS Probes [21] are installed on the ARC-TOP. This is used to measure possible leakage inside the pressure hull at four different locations at the bottom endcap. |
| GPS | Position measurements are obtained using a Quectel L86-M33 GPS module [22] mounted at the very top to the ARC-TOP in a separate pressure hull. This only has connection when the instrument is at the surface. |
Fig. 10.
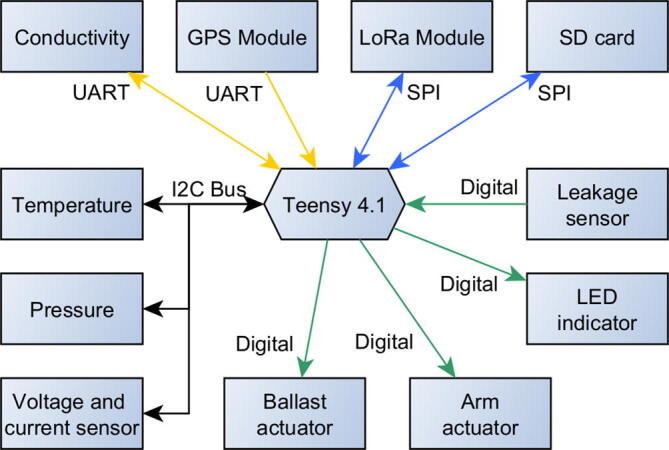
Component overview with communication protocol for the ARC-TOP.
Wiring and PCB
Spatial requirements within the pressure hull dictates a very compact electric design with strict wire planning. Wires enter the pressure hull from both endcaps, and this presents a design challenge concerning easy disassembly and assembly. The resulting design uses two 2-layer printed circuit boards (PCBs) connected to each their own endcap with a single 12-wire cable as interface to alleviate these requirements. Fig. 11 shows the pressure hull PCBs, internal skeleton, and interface cable between PCBs.
Fig. 11.
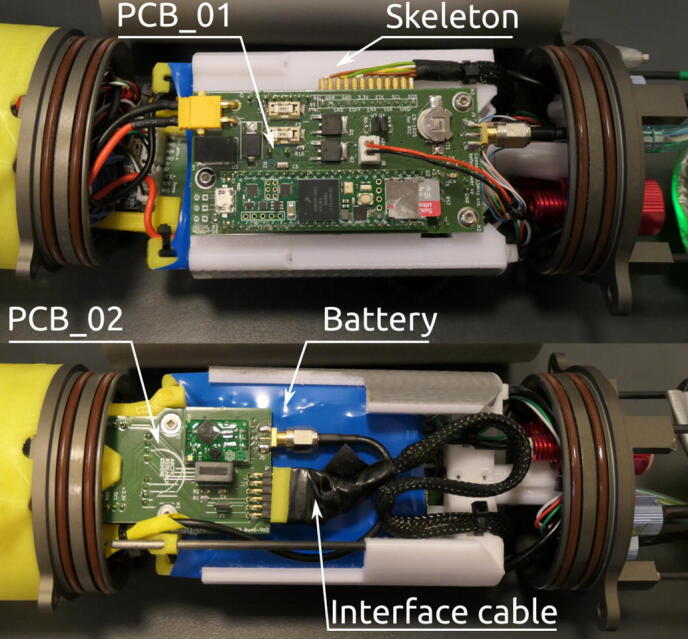
PCBs, wiring and skeleton of the pressure hull seen from the front and back with hull removed.
PCB_01 houses the Teensy microcontroller board and control electronics. PCB_02 is mainly used for connectors and electrical isolation for the conductivity sensor. Schematics for both PCBs can be seen in Fig. 12 and Fig. 13.
Fig. 12.

Schematic for PCB_01.
Fig. 13.

Schematic for PCB_02.
UAV
Custom mounting hardware and release mechanisms for the ARC-TOP have been designed for the UAV used. Modifying the mounting hardware for other UAVs is possible by simply exchanging a few 3d printed parts to fit the specific use-case. The electric design allows connecting to different UAV autopilot units with little to no configuration.
The ARC-TOP is mounted below the UAV with a strap that can be released by servo actuation.
A DJI Digital FPV System camera and transmitter [23] is mounted at the front of the mounting hardware to enable remote operation. A hook is mounted at the rear for retrieval of the instrument after profiling. Both are operated by servos.
A MaxBotix MB1242 ultrasonic rangefinder [24] is used to overlay aircraft altitude on the pilot display for accurate instrument drop height.
Software
All software is written in the Arduino programming language. The software is designed as a state-machine that, when armed, autonomously navigates the appropriate states to complete a profile. Table 4 describes each state along with the conditions for entering the state.
Table 4.
Software states ordered by normal operating flow.
| State | Description | Entered if |
|---|---|---|
| Start-up | Initialize peripherals and communications, check for errors, report status and enter Idle or Error state based on status | Power on |
| Idle | Instrument is ready to accept commands, while continuously monitoring position and system status | Either: Successful start-up Disarming profiler Reload ballast/arm complete |
| Reload ballast/arm | Reload actuator by melting used PCL material for easy removal. This is done by heating the heating element to a predefined temperature using a PID controller. | Received reload ballast/arm command and system state is idle |
| Armed | Ready the instrument for drop and flight by UAV: Read CTD sensors Update position based on GPS input Broadcast instrument status by LoRa Check for incoming commands Enter Dive state if dropped from UAV |
State is idle and received arm command |
| Dive | Measures CTD downcast profile and continuously monitors if the dive should be aborted by setting Release ballast state if: Depth reached Leak detected Max dive time elapsed |
Detected drop from UAV in arm state |
| Release ballast | Release ballast to start ascent by heating the heating element. Repeat if depth is not decreasing. Set ascent state when complete | Dive completed/aborted |
| Ascent | Measures CTD upcast profile and check if the instrument has reached the surface: Set state Release arm if surface reached Set state Low power surface if max ascent time elapsed |
Decreasing depth detected after releasing ballast |
| Release arm | Release arms to enable pickup by heating the heating element. Sets state Surface when complete | Surface detected after ascent |
| Low power surface | Wait for reaching surface with non-essential systems shut down for low power consumption. Set state Release arm if surface reached | Surface not detected after ascent |
| Surface | Update position based on GPS input and broadcast it using LoRa radio along with system status | Release arm complete |
| Error | Broadcast error message while monitoring system status | Error detected |
The status indicator LED is cycled at a frequency and duty cycle unique to the individual software states using interrupts at all times when the instrument is turned on.
Data logging
All data is saved to the SD card in a single CSV file per dive for later download. Logging information is stored in a single text file per dive.
Depth measurements are logged in meters, temperature in degrees Celsius and salinity in PSU.
Price
Using consumer grade components and sensors and 3D-printed hull sections keeps the price of the ARC-TOP at a minimum, totalling € 3153. Low price is essential for use in high-risk areas. An overview of system cost is seen in Fig. 14. The listed cost is based on the production of two sensor units and a single UAV mounting hardware unit. Cost of development and assembly is not included.
Fig. 14.

Price overview of the ARC-TOP ex. VAT.
The pressure hull accounts for 45 % of the total cost, due to the custom machined components. At larger production volume the cost of custom parts decreases greatly. Exact figures for various production volumes have not been calculated. Cost of individual components can be found in the attached BOM. In-house production cost has been estimated on an hourly wage of € 67.
Design files summary
Design files for construction and further development have been uploaded to an online repository (https://doi.org/10.17632/zdvb5hzv2x.1). Each folder in the repository contains a read-me file with information specific to the design files in this folder.
A summary of the main design files are listed in Table 5. A complete list is found in the file Naming_and_BOM.xlsx.
Table 5.
Design file summary. Listed files are the recommended files for design file overview. Other design files are linked inside the listed files.
| Design file name | File type | Open source license | Location of the file |
|---|---|---|---|
| Naming_and_BOM.xlsx | Excel Workbook | CC BY 4.0 | https://doi.org/10.17632/zdvb5hzv2x.1 |
| TOP-200-Model.step | CAD file | CC BY 4.0 | https://doi.org/10.17632/zdvb5hzv2x.1 |
| TOP-300-Model.step | CAD file | CC BY 4.0 | https://doi.org/10.17632/zdvb5hzv2x.1 |
| TOP-220-PCB_01.pro | KiCad Project | CC BY 4.0 | https://doi.org/10.17632/zdvb5hzv2x.1 |
| TOP-220-PCB_02.pro | KiCad Project | CC BY 4.0 | https://doi.org/10.17632/zdvb5hzv2x.1 |
| TOP-320-PCB_03.pro | KiCad Project | CC BY 4.0 | https://doi.org/10.17632/zdvb5hzv2x.1 |
| TOP-420-PCB_04.pro | KiCad Project | CC BY 4.0 | https://doi.org/10.17632/zdvb5hzv2x.1 |
| KiCad library | Directory | CC BY 4.0 | https://doi.org/10.17632/zdvb5hzv2x.1 |
| Solution.sln | Visual Studio solution | CC BY 4.0 | https://doi.org/10.17632/zdvb5hzv2x.1 |
| TOP-220-Controller.ino | Arduino Software file | CC BY 4.0 | https://doi.org/10.17632/zdvb5hzv2x.1 |
| TOP-320-Controller.ino | Arduino Software file | CC BY 4.0 | https://doi.org/10.17632/zdvb5hzv2x.1 |
| TOP-420-Controller.ino | Arduino Software file | CC BY 4.0 | https://doi.org/10.17632/zdvb5hzv2x.1 |
The Naming_and_BOM.xlsx Excel Workbook contains helpful information regarding the design files by supplying a naming convention used for all files and a complete list of all relevant files. Bill of Material information is also listed here.
TOP-200-Model.step is a complete CAD file for all components in the ARC-TOP profiler. A SolidWorks assembly is also provided in the same location.
TOP-300-Model.step is a complete CAD file for all components in the ARC-TOP UAV mounting hardware. A SolidWorks assembly is also provided in the same location.
TOP-220-PCB_01.pro through TOP-420-PCB_04.pro are KiCad project files for PCB manufacturing of all circuit boards for the entire solution (profiler, UAV, ground station). Relevant library components (schematics and footprints) are located in the KiCad library directory.
The free code editor Visual Studio Community [25] have been used extensively throughout software development, along with the plugin for Arduino development Visual Micro [26]. Visual Studio organizes code in “Solutions” that contain all necessary links between projects and libraries. It is recommended to use the file Solution.sln to inspect the code. TOP-220-Controller.ino, TOP-320-Controller.ino and TOP-420-Controller.ino are the projects uploaded to the microcontrollers of the profiler, UAV and ground station, respectively.
Bill of materials summary
A summary of the main components is listed as a BOM in Table 6. A complete BOM can be found in the root of the supplied repository in the file Naming_and_BOM.xlsx.
Table 6.
Bill of Materials summary. A complete BOM can be found in the supplied repository with the name “Naming_and_BOM.xlsx”.
| Designator | Component | Number | Cost per unit - EUR ex. VAT | Total cost - EUR ex. VAT | Source of materials | Material type |
|---|---|---|---|---|---|---|
| P01 | Mini Conductivity Probe K 1.0 | 1 | 100.65 | 100.65 | https://atlas-scientific.com | Semi-conductor |
| P02 | EZO Conductivity circuit | 1 | 54.73 | 54.73 | https://atlas-scientific.com | Semi-conductor |
| P03 | Potted Cable Penetrator, M6 | 4 | 3.53 | 14.13 | https://bluerobotics.com | Metal |
| P04 | West System epoxy G/flex 650–8 | 1 | 33.24 | 33.24 | https://www.hfmarine.dk | Polymer |
| P05 | RG174A/U 50 Ohm Coax cable 20 m | 1 | 22.98 | 22.98 | https://dk.rs-online.com | Semi-conductor |
| P06 | 24 AWG, 4 conductor PU cable | 1 | 4.41 | 4.41 | https://bluerobotics.com | Metal |
| P07 | Cylindrical ceramic heating element | 2 | 6.24 | 12.48 | Zhuhai 4U Electronic Ceramics Co. | Ceramic |
| P08 | DiaCast 76 PUR Casting rubber | 1 | 20.87 | 20.87 | https://www.diatom.dk | Polymer |
| P09 | SMA Female crimp connector, RG-174 | 3 | 3.77 | 11.30 | https://dk.rs-online.com | Metal |
| P10 | 433 MHz antenna | 3 | 8.60 | 25.80 | https://www.mouser.dk | Semi-conductor |
| P11 | Quectel GPS receiver | 1 | 16.80 | 16.80 | https://dk.rs-online.com | Semi-conductor |
| P12 | O-ring 33 X 2 NBR | 1 | 0.64 | 0.64 | https://ehandel.mw.dk | Polymer |
| P13 | Simple Penetrator M10 | 4 | 15.01 | 60.04 | https://www.bluetrailengineering.com | Metal |
| P14 | TOP-211-Endcap_top | 1 | 389.81 | 389.81 | Nymark & Fogh Teknik | Metal |
| P15 | TOP-211-Endcap_bottom | 1 | 389.81 | 389.81 | Nymark & Fogh Teknik | Metal |
| P16 | Polyurethane Tubing Ø8mm, 1 m | 1 | 3.53 | 3.53 | https://www.bluetrailengineering.com | Polymer |
| P17 | Celsius Fast-Response Temperature Sensor, ±0.1 °C | 1 | 52.98 | 52.98 | https://bluerobotics.com | Semi-conductor |
| P18 | Subsea LED indicator | 1 | 11.48 | 11.48 | https://bluerobotics.com | Semi-conductor |
| P19 | M10 enclosure vent and plug | 1 | 7.95 | 7.95 | https://bluerobotics.com | Metal |
| P20 | Bar30 High-Resolution Pressure Sensor, 300 m | 1 | 63.57 | 63.57 | https://bluerobotics.com | Semi-conductor |
| P21 | VEC™- Carbon fibre rod Ø3mm 1 m | 2 | 1.82 | 3.63 | https://ekomposit.dk | Composite |
| P22 | Closed cell PU foam 20x30x810mm | 1 | 6.72 | 6.72 | Arbi-Skum | Polymer |
| P23 | Teensy 4.1 development board | 1 | 27.57 | 27.57 | https://www.elfadistrelec.dk | Semi-conductor |
| P24 | 2.54 mm pitch socket head male header, right angle | 2 | 5.46 | 10.92 | https://www.mouser.dk | Metal |
| P25 | 2.54 mm pitch socket head female header, double row | 2 | 55.69 | 111.38 | https://www.digikey.dk | Metal |
| P26 | VEC™- Carbon fibre tube Ø7mm 1 m | 2 | 6.35 | 12.69 | https://ekomposit.dk | Composite |
| P27 | SOS Leak sensor | 1 | 25.61 | 25.61 | https://bluerobotics.com | Semi-conductor |
| P28 | Paracord Ø1.9 mm 1 m | 15 | 0.28 | 4.20 | https://www.paracord.eu | Polymer |
| P29 | 18650 lithium battery cell, 3.7 V, 3Ah | 4 | 8.23 | 32.92 | https://www.conradelektronik.dk | Metal |
| P30 | Li-ion 4S 20A Li-ion BMS | 1 | 10.65 | 10.65 | https://www.batteri-energi.dk | Semi-conductor |
| P31 | XT30 connector, female | 1 | 0.70 | 0.70 | https://www.conradelektronik.dk | Metal |
| P32 | Heat shrink tubing, 120 mm | 1 | 2.17 | 2.17 | https://batteri-energi.dk | Polymer |
| P33 | Carbon fibre plate, cured | 1 | 12.48 | 12.48 | https://ekomposit.dk | Composite |
| P34 | Nylon Webbing | 1 | 6.35 | 6.35 | https://www.jemogfix.dk | Polymer |
| P35 | TOP-211-Canister | 1 | 389.81 | 389.81 | Nymark & Fogh Teknik | Metal |
| P36 | Threaded rod, M4 | 1 | 6.14 | 6.14 | https://ehandel.mw.dk | Metal |
Parts in the BOM that have a listed price of € 0 is due to in-house production (mainly 3D-printing and simple cutting of materials). This is naturally not applicable if an external manufacturing service is used. The cost of materials for these parts is included in the BOM as a separate entry.
Build instructions
The general assembly procedure for the ARC-TOP is to assemble the pressure hull first with all cable penetrators attached. Once complete, the top and bottom hulls should be assembled and mated with the pressure hull. An exploded view of the profiler can be seen in Fig. 15 as a reference during assembly. It is highly recommended to use the provided CAD files for component placement and identification.
Fig. 15.

General overview of the ARC-TOP during assembly with marked LoRa antenna (1), GPS antenna (2), buoyancy foam (3), top hull (4), pick-up arms (5), top endcap with penetrators (6), electronics frame (7), battery (8), pressure hull (9), pressure hull fastener (10), bottom endcap with penetrators (11), ballast (12), sensor mount (13), bottom hull (14), ballast cap (15) and nose (16).
Detailed assembly instructions for each subassembly follows below. General guidelines throughout manufacturing:
-
•
Carbon fibre parts will need to be cut and shaped during assembly. Please use appropriate protective equipment.
-
•
Casting and potting using epoxy resin and polyurethanes is required along with alcohol and acetone. These chemicals are hazardous and should be handled using required safety measures.
-
•
Soldering electronics is part of the assembly process. Use a well-ventilated area to prevent build-up of fumes.
-
•
O-rings should be inspected before installing to check for any damage or contaminants. All O-rings should be lubricated using an appropriate lubricant (we use Molykote 111 Compound [27]).
-
•
Any fastener that is in contact with water should be of A4 grade stainless steel.
-
•
When assembling and handling the ARC-TOP take care not to damage any wires from tools or sharp edges. A small cut in the insulation can cause a leak.
-
•
The PU tube used with the Simple Penetrator can be disassembled for fine tuning tubing length or maintenance by cutting the tubing around the spigot with a wire cutter. Caution must be exercised not to damage the Simple Penetrator as this can impede the performance of the penetrator. Refer to the manufacturer guidelines [28].
Technical drawings are available in the supplied repository for machined parts. Screws, bolts and nuts used during assembly are listed in Table 7.
Table 7.
List of fasteners used during assembly.
| Standard | Size | Description | Purpose |
|---|---|---|---|
| DIN 7982 | 2.2X6.5 | Countersunk self-tapping screw | Plastic |
| DIN 7982 | 2.2X9.5 | Countersunk self-tapping screw | Plastic |
| DIN 7982 | 4.2X9.5 | Countersunk self-tapping screw | Plastic |
| DIN 912 | 3X35 | Cylindrical socket head screw | Bolted joints |
| DIN 912 | 3X20 | Cylindrical socket head screw | Bolted joints |
| DIN 985 | M3 | Locking nut | Fastening |
| DIN 985 | M4 | Locking nut | Fastening |
| DIN 975 | M4 | Threaded rod | Pressure hull securing |
Aluminium parts
The following parts should be hard anodized to a thickness of min. 25 to prevent accidental damage to the protective layer during use:
-
-
TOP-211-Canister
-
-
TOP-211-Endcap_bottom
-
-
TOP-211-Endcap_top
-
-
TOP-310-Hook_arm
-
-
TOP-310-Hook_tube
See supplied technical drawings for manufacturing instructions.
3D-printed parts
The supplied BOM contains list of all 3D-printed parts and their quantity. These have been printed on consumer grade FDM printers. The used material is also listed. After printing any support material must be removed and print defects should be corrected if possible.
Potting
Prior to potting, make sure the Atlas Mini Conductivity Probe K 1.0 and EZO Conductivity circuit (P01-2) return reliable readings. Continue with potting:
-
1.
Cut the Mini Conductivity Probe K 1.0 connector off to allow insertion into the penetrator.
-
2.
Cut wire to length according to Table 8. The PU insulation of the PU Cable must be removed on the internal part.
-
3.
Lightly abrade the wire with 80-grit sandpaper and wipe with acetone at the location of the penetrator (according to Table 8) to improve bonding.
-
4.
Clean the penetrator (P03) potting face with rubbing alcohol. Avoid touching this face afterwards to prevent contaminating the bonding.
-
5.
Thoroughly abrade the potting face of the penetrator with 80-grit sandpaper immediately prior to potting. Continue until through the blue anodizing to improve bond strength.
-
6.
Clean the abraded surface multiple times with acetone.
-
7.
Insert wire into penetrator with the abraded part of the wire aligning with the penetrator and mount in a fixture that holds the penetrator upright while fixing the wire.
-
8.
If necessary, use tacky tape to seal the internal part of the penetrator to prevent epoxy running through.
-
9.
Mix G/flex epoxy (P04) in the ratio specified by the manufacturer. This epoxy has a high viscosity and extra care must be taken no to introduce air into the epoxy when mixing.
-
10.
Pour epoxy into the penetrator. Be careful not to introduce air into the epoxy. Lightly tap the fixture or the penetrators to help the epoxy flow into the penetrator and to help air escape.
-
11.
Wait for the epoxy to fully cure before removing from the fixture.
Table 8.
Cable lengths of potted penetrators. External lengths is the length from external cable end to external face of the penetrator (cup end). Internal lengths is the length from internal cable end to internal face of the penetrator (threaded end).
| Component | Wire | External length [mm] | Internal length [mm] | Total length [mm] |
|---|---|---|---|---|
| LoRa | Coaxial (P05) | 500 | 300 | 800 |
| Actuator, top | PU Cable (P06) | 320 | 250 | 570 |
| Actuator, bottom | PU Cable (P06) | 320 | 180 | 500 |
| Mini Conductivity Probe K 1.0 (P01) | Coaxial, supplied with probe | 260 | Rest | – |
The complete potting of two penetrators can be seen in Fig. 16.
Fig. 16.
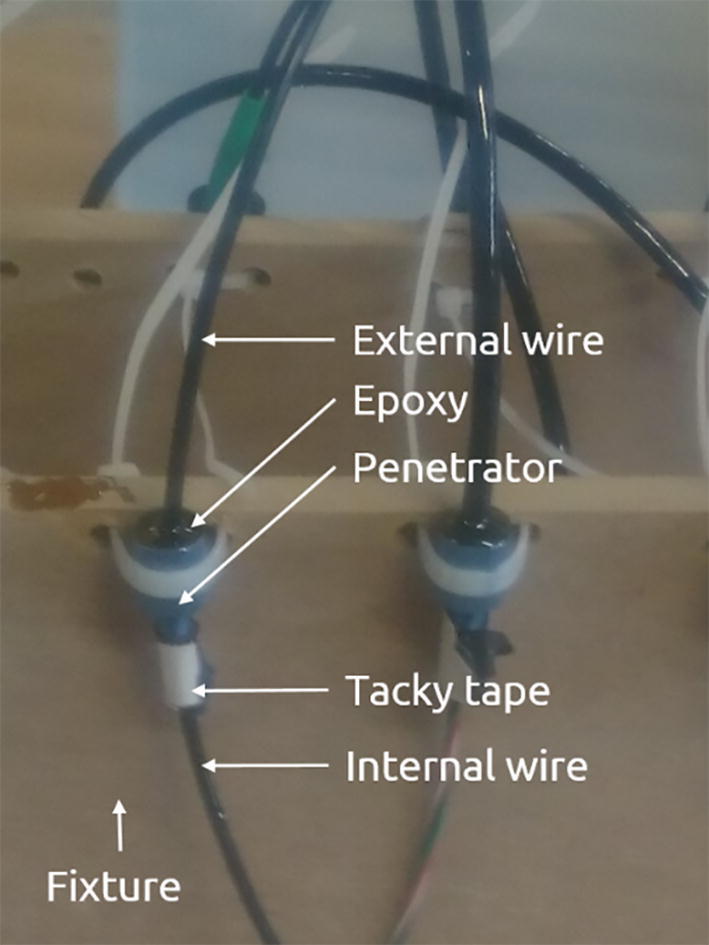
Completed potting of penetrator.
Heating elements
-
1.
Print the enclosure TOP-250-Heating_element_casting and clean the internal compartment from any strings produced during printing.
-
2.
Strip back 5 mm of the external wire prepared during potting above and solder the heating element (P07) to the wire. Use heat shrink tubing to prevent shorting.
-
3.
Lightly abrade the wire near the heating element with 80-grit sandpaper and wipe with acetone to improve bonding to the PUR casting rubber (P08).
-
4.
Insert and fix the heating element inside the printed enclosure with the cylindrical heating element being concentric with the holes in the enclosure. Make sure the heating element is not in contact with the enclosure.
-
5.
Insert a smooth Ø3 mm rod into the holes in the enclosure and through the heating element. We used a M3 bolt with a long non-threaded shaft.
-
6.
Mix the PUR casting rubber in the ratio specified by the manufacturer. Mix slowly to prevent introducing air into the mixture.
-
7.
Pour mixture into the enclosure and wait for it to fully harden before handling.
-
8.
Carefully remove the Ø3 mm rod from the casting by twisting while pulling.
-
9.
Cut off the bottom stabilizing surface and the wire fix tab.
LoRa antenna
-
1.
Print the enclosure TOP-241-LoRa_antenna_housing and clean the internal compartment from any strings produced during printing.
-
2.
Install a female SMA (P09) connector on the external coaxial wire prepared during potting above and connect the wire to the 433 MHz antenna (P10).
-
3.
Lightly abrade the wire near the heating element with 80-grit sandpaper and wipe both the wire and the antenna with acetone to improve bonding to the PUR casting rubber.
-
4.
Insert the antenna and wire through the bottom of the printed enclosure and seal the bottom with tacky tape. Make sure the antenna does not touch the sides of the enclosure.
-
5.
Mix the PUR casting rubber in the ratio specified by the manufacturer. Mix slowly to prevent introducing air into the mixture.
-
6.
Pour mixture into the top of the enclosure and wait for it to fully harden before handling.
-
7.
Cut off the bottom stabilizing surface.
Anode
Two zinc anodes were made in-house using the dimensions of the part TOP-211-Anode. Tolerances are generally very high.
GPS canister
Use the exploded view in Fig. 17 as a reference during assembly.
-
1.
Solder twisted pair wires with ground on all pairs to the GPS module (P11) pins RXD1, TXD1, Reset and VCC. See the module datasheet [29]. We used Cat 5e network cable as this is supplied as twisted pairs.
-
2.
Solder the ground wires from the pairs to the GND pins.
-
3.
Short the V_BCKP pin to VCC on the module.
-
4.
Use glue as stress relief for the wires, bending the wires towards the centre of the module.
-
5.
Assemble according to Fig. 17. Remember to install the O-ring (P12) and nut for the Simple Penetrator (P13) during assembly (not shown).
Fig. 17.

Exploded view of the GPS hull. Parts are: TOP-233-GPS_antenna_hull_endcap (1), GPS module (P11) (2), Simple Penetrator (P13) (3), TOP-233-GPS_antenna_hull (4), TOP-233-GPS_antenna_mount (5), M3x20 A4 bolt (6), M3 A4 locking nut (7).
Pressure hull
-
1.
Sand down the anode mounting points on both endcaps (P14-15) to remove the anodizing to improve electrical connection between hull and anode.
-
2.
Clean the mounting surfaces and mount the anodes.
-
3.
Check the electrical connections using an Ohmmeter.
-
4.On the top endcap (P14):
-
a.Mount the penetrators to the endcap using Fig. 18 as reference.
-
i.Install part TOP-211-Electronics_frame_top before installing the nuts on the inside face of the endcap.
-
i.
-
b.Remember to insert the O-rings supplied with the penetrators.
-
c.Install PU tube (P16) of approx. 70 cm on the Simple Penetrator
-
d.Thread the wires from the GPS assembled above into the open end of the PU tube, without inserting the GPS-end Simple Penetrator into the tube.
-
a.
-
5.On the bottom endcap (P15):
-
a.Mount the penetrators to the endcap using Fig. 19 as reference.
-
i.Install part TOP-211-Electronics_frame_bottom before installing the nuts on the inside face of the endcap.
-
i.
-
b.Remember to insert the O-rings supplied with the penetrators.
-
c.Install PU tube of approx. 10 cm on the Simple Penetrator
-
d.Mount the Celsius temperature sensor (P17) with O-ring in the part TOP-231-Temp_coupler. Mount the Simple Penetrator with O-ring to the other end by threading the wire through the penetrator.
-
e.Thread the wires from the temperature assembly into the open end of the PU tube, without inserting the temperature-end Simple Penetrator into the tube.
-
a.
-
6.
Cut the threaded rod (P36) into two pieces of 190 mm.
Fig. 18.
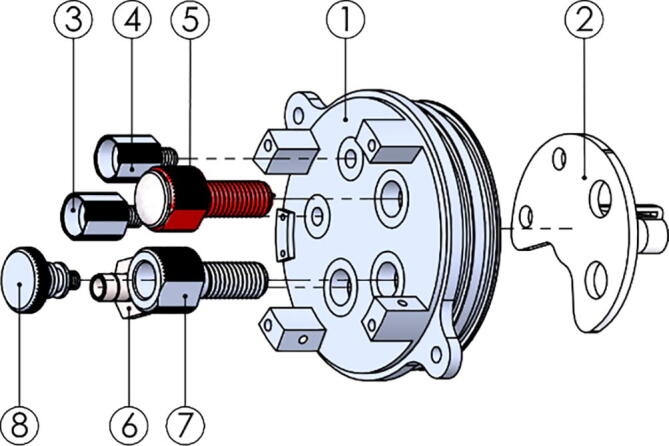
Top endcap assembly with part TOP-211-Endcap_top (1), TOP-211-Electronics_frame_top (2), potted LoRa antenna (3), potted heating element (4), indicator (P18) (5), Simple Penetrator (P13) (6) and Vent Plug (P19) (7–8).
Fig. 19.
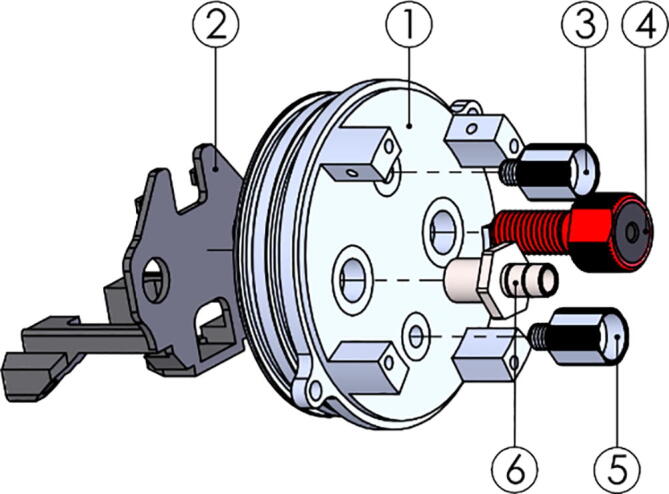
Bottom endcap assembly with part TOP-211-Endcap_bottom (1), TOP-211-Electronics_frame_bottom (2), potted Mini Conductivity Probe K 1.0 (3), Bar30 pressure sensor (P20) (4), potted heating element (5), and Simple Penetrator (P13) (6).
Top hull
-
1.
Insert and fasten parts TOP-250-Lever and TOP-250-Locking_arm_top in TOP-211-Top_hull_03 with M3 bolts and locking nuts. Do not tighten too much, as arms need to pivot freely.
-
2.
Insert the top heating element in the part TOP-211-Top_hull_03 using M3 bolts and locking nuts.
-
3.
Route the wires for the GPS and LoRa antennas on the outside of TOP-211-Top_hull_03 in the slots provided.
-
4.
Cut four Ø3 mm carbon rods (P21) to a length of 324 mm. Glue them into TOP-211-Top_hull_01 and TOP-211-Top_hull_02.
-
5.
Slide the GPS and LoRa antennas through the assembly and push the carbon fibre rods through TOP-211-Top_hull_03 and into the top endcap (P14). Install and tighten M3 set screws to secure the top hull to the endcap.
-
6.
Install part TOP-211-Buoyancy_foam_adjuster into part TOP-211-Top_hull_02.
-
7.
Insert buoyancy foam into the top hull with the antenna wires in the designed slots.
-
8.
Before inserting the part TOP-211-Top_hull_antenna_mount check the length of the PU tube and shorten if necessary. Be careful not to damage the wires. Insert the GPS-end Simple Penetrator into the PU tube.
-
9.
Route the GPS antenna through the centre of the part TOP-211-Top_hull_antenna_mount with the LoRa antenna on the outside in the designated mounting bracket.
Bottom hull
-
1.
Insert and fasten parts TOP-250-Lever and TOP-250-Locking_arm_bottom in TOP-211-Bottom_hull_02 with M3 bolts and locking nuts. Do not tighten too much, as arms need to pivot freely.
-
2.
Insert the bottom heating element using M3 bolts and locking nuts.
-
3.
Cut four Ø3 mm carbon rods to a length of 126 mm. Glue them into TOP-211-Bottom_hull_01 and TOP-211-Bottom_hull_02.
-
4.
Install the bottom hull on the endcap. Install and tighten M3 set screws to secure the hull.
-
5.
Route the Mini Conductivity Probe K 1.0 and Celsius temperature sensor out the holes in the hull sidewalls. Check the length of the PU tube to the temperature sensor and adjust accordingly. Insert the Simple Penetrator into the PU tube.
-
6.
Assemble TOP-211-Sensor_mount_cond_01 and TOP-211-Sensor_mount_cond_02 and mount to the bottom hull after inserting the conductivity probe.
-
7.
Assemble TOP-211-Sensor_mount_temp_01 and TOP-211-Sensor_mount_temp_02 and mount to the bottom hull after inserting the temperature sensor.
-
8.
Mount part TOP-211-Nose
-
9.
Cut two pieces of PU foam (P22) of 70 mm and glue into the ballast slots on the sides of the bottom hull.
-
10.
Mount part TOP-253-Fork to TOP-253-Ballast_holder and install on the bottom hull.
Electronics
-
1.
Solder components to PCB_01 and PCB_02 using the supplied schematics for reference.
-
2.
Cut the trace between VIN and VUSB on the back of the Teensy 4.1 (P23) board to allow both USB and battery power [14].
-
3.Create a 180 mm wire harness connected to connector P24 on PCB_01 and connector P25 using the schematics for reference. Insert P25 into part TOP-280-Connector_housing to secure the contacts.
-
a.We used a braided sleeve and heat shrink tubing to organize the harness.
-
a.
-
4.
Cut a Ø7 mm carbon tube (P26) to a length of 40 mm and use it to mount part TOP-211-Electronics_frame_main_01 to TOP-211-Electronics_frame_top already installed on the top endcap.
-
5.
Cut a Ø3 mm carbon rod to a length of 90 mm and glue it into TOP-211-Electronics_frame_main_01 in the position shown in the CAD assembly.
-
6.
Install PCB_01 on the part TOP-211-Electronics_frame_main_01.
-
7.
Install leak sensor probes (P27) in the bottom endcap using the adhesive supplied with the probes.
-
8.
Install PCB_02 on the part TOP-211-Electronics_frame_bottom.
-
9.
Install the appropriate connectors on all wires and connect them to the PCB’s.
-
10.
Secure wires to the available mounting points around the frame to make sure no wires will suffer damage during canister assembly and disassembly.
-
11.
Install two 50 mm carbon rods in part TOP-211-Electronics_frame_main_02 for securing the battery.
Arms
-
1.
Cut paracord (P28) to a length of 1200 mm. Tie one end to the part TOP-251-Wire_mount.
-
2.
Tread the other end through the loops in the top hull, from bottom to top.
-
3.
If a winch is to be used, install the coupler TOP-251-Wire_coupler and tie a knot to prevent it from moving along the cord.
-
4.
Run the cord through the arms TOP-251-Arm_500mm with the buoyancy foam TOP-251-Buoyancy and the part TOP-251-Fork already installed.
-
5.
Repeat the procedure above in reverse for the other side.
-
6.
Install PU foam through the opening in part TOP-211-Top_hull_antenna_mount and fasten it to the arm using cable ties.
-
7.
Install small blocks of PU foam to the arms on either side of the part TOP-251-Fork with cable ties to provide the releasing force for actuation. See Fig. 21.
Fig. 21.
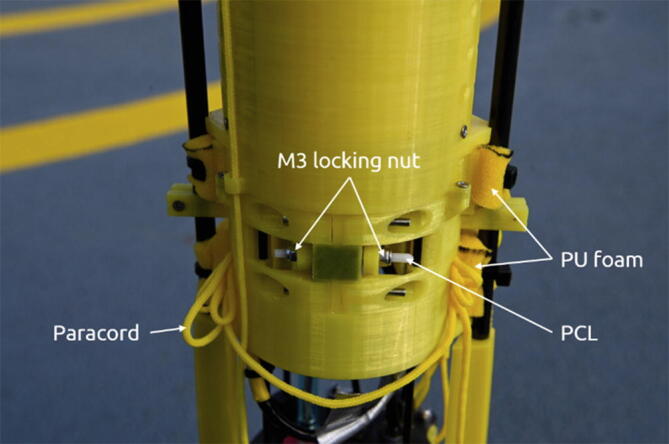
Overview of the loaded pick-up arms and actuator. Photo courtesy of Peter Bondo Christensen.
Battery
-
1.
Spot weld four balanced cells (P29) in series in a flat configuration with alternating polarity
-
2.
Insert the cells into the holders TOP-260-Batteri_frame and TOP-260-Batteri_frame_mirror.
-
3.
Screw the part TOP-260-Battery_frame_bottom to the two cell holders and mount the BMS (P30) over the designed pins.
-
4.
Heat and compress the pins to lock the BMS in place.
-
5.
Solder connections to the BMS in a common port configuration and secure the main battery leads to the cell holders using cable ties. Solder a female XT30 (P31) connector to the battery leads.
-
6.
Cover the battery pack in heat shrink tubing (P32) and heat until the tubing shrinks tight around the pack.
UAV
-
1.
Cut the carbon fibre plates (P33) in the specified shape, along with the various Ø7 mm carbon fibre tubes and Ø3 mm carbon fibre rods.
-
2.
The tube and rod assemblies are designed for compression fits but depending on printer tolerances some adhesive might be necessary.
-
3.
The nylon webbing (P34) must be sewn to the correct size. Test fit with the assembled profiler and cut length accordingly.
-
4.
Attach a 3 m long paracord to the hook and coil it on the spool.
Operation instructions
For safe operations, we recommend deploying the UAV from land. Greenland fjords are often about 2–5 km across in the inner glacier covered parts and launching the UAV at a safe distance above tsunami (from glacier calving) water levels a 1 km range is often sufficient to reach the subglacial discharge plume.
Pre deployment
At this stage, the hull is assumed to be disassembled as shown in Fig. 20.
Fig. 20.

The disassembled profiler before preparing for deployment. From left to right: Bottom hull, pressure hull and top hull. Photo courtesy of Peter Bondo Christensen.
To prepare for deployment:
-
1.
Charge the profiler battery to 16.8 V.
-
2.
Insert SD card in the profiler if not already inserted.
-
3.
Place ballast in bottom hull by compressing the PU foam, inserting ballast and closing the bottom cover. Hold tight while inserting a PCL rod through the locking levers and repeat for the other ballast.
-
4.
While holding the ballast tight use M3 locking nuts on the PCL rod to secure the ballast in place. See Fig. 21 for reference. The ballast actuator is identical to the pick-up arm actuator.
-
5.
Load the pick-up arms by tightening the paracord and bundling all excess cord. While holding these bundles to the sides of the top hull place the arms along the sides of the top hull. Make sure the forks are inserted into the holes next to the heating element. The foam blocks should keep the cord bundles in place.
-
6.
Hold the arms in place while inserting a PCL rod into the heating element and locking levers. Secure with two M3 locking nuts on the PCL rod. See Fig. 21 for reference.
Power on and assembling
-
1.
Remove the vent plug to allow air to escape during assembly.
-
2.
Insert the charged battery into the slot on the electronics frame TOP-211-Electronics_frame_main_01.
-
3.
Insert the spacer TOP-211-Electronics_frame_main_02 to secure the battery.
-
4.
Slide the canister (P35) over the assembly and the top endcap. It should snap into place if the two O-rings are properly lubricated.
-
5.
Connect the cable harness to PCB_02 on the bottom hull.
-
6.
Connect the ground station PCB_04 to a PC and open a serial monitor on the connected port.
-
7.
Power on the ARC-TOP by connecting the battery to PCB_01.
-
8.
Check the serial monitor on the ground station and the indicator LED on the profiler. Proceed with assembly if no error is indicated.
-
9.
Slide the bottom endcap into the canister using the guide pin to align the assemblies. It should snap into place if the O-rings are properly lubricated.
-
10.
Secure the pressure hull by installing the M4 threaded rods with locking nuts.
-
11.
If possible, a vacuum test should be conducted to test for any leaks in the system. We used an Ametek T-975-CPF pump and HPC40 sensor [30], [31]. Cheaper options like the Mityvac Hand Operated Vacuum Pump [32] should suffice.
-
12.
Close vent plug.
Prepare for dive
-
1.
Set dive parameters by sending the appropriate command (see Naming_and_BOM.xlsx for command API).
-
2.
Prepare hook on the UAV by inserting the spool into the bracket and mounting the hook.
-
3.
Mount the profiler on the UAV.
-
4.
Send arm command to profiler and check for correct status response.
Deploy
-
1.
Continuously monitor ground station for correct status response from the profiler. Abort deployment if error detected.
-
2.
Fly UAV to deployment position and deploy at a height of max 1 m above sea level.
-
3.
Depending on UAV flight time, either hover until retrieval or return to home position.
Retrieval
-
1.
Monitor ground station for profiler surface message. The broadcasted message contains the position of the profiler.
-
2.
When a message is received, fly the UAV to the profiler position.
-
3.
When the profiler is identified deploy the hook.
-
4.
Lower the hook into the water by slowly decreasing UAV altitude.
-
5.
Drag the hook through the water until it catches the profiler pick-up arms.
-
6.
Increase the UAV altitude until the profiler is clear of the water.
-
7.
Pilot the UAV to the home position being mindful of the pendulum effect of the suspended mass of the profiler.
-
8.
Gently settle the profiler on the ground before landing the UAV.
Disarm and securing
-
1.
Send disarm command to the profiler.
-
2.
If no error is indicated, rinse the profiler in fresh water to prevent corrosion.
-
3.
Clean the actuator heating elements by sending the appropriate reload commands and inserting a Ø3 mm carbon rod into the element. This will remove any leftover PCL and prepare for the next deployment.
-
4.Thoroughly dry the profiler and open the canister after removing the vent plug.
-
a.Remember to compress the PU foam to extract the absorbed water.
-
a.
-
5.
Unplug the battery from PCB_01 and transfer the SD card from PCB_01 to a suitable reader to download data to a computer.
Validation and characterization
The ARC-TOP profiler was tested during August of 2021 on a cruise in NE Greenland. Testing was intensified at the Waltershausen Glacier in Nordfjord (73.5°N, 24.11°W) and at the Gerard de Geer Glacier in Isfjord (73.3°N, 27.2°W). See Fig. 22.
Fig. 22.

Test locations in NE Greenland in Isfjord and Nordfjord marked with X.
Operational feasibility
Testing the operational feasibility of the concept was done by conducting tethered dives to depths of up to 200 m where the profiler was free to move in the vertical axis along the tether. During these tests the ARC-TOP was deployed by hand and used its buoyancy engine to return to the surface. The profiler successfully demonstrated autonomous operation of the sensor system, buoyancy engine, pick-up arms and radio communications.
To further validate the sensor system we conducted tests in concert with commercially available CTD instruments. The ARC-TOP was tested with an RBRconcerto and a Seabird SBE 19plus in the configuration shown in Fig. 23. No significant difference were found between the calibrated temperature (paired t-test, p = 0.27, α = 0.05) and salinity readings (paired t-test, p = 0.086, α = 0.05) of the ARC-TOP and SBE 19plus instruments. An example of recorded data in close proximity to glacier termini is presented in Fig. 24.
Fig. 23.

Simultaneous testing of CTD instruments. ARC-TOP (1), RBRconcerto (2) and Seabird SBE 19plus (3 behind ARC-TOP).
Fig. 24.

Temperature (left) and salinity (right) measurements by ARC-TOP approximately 200 m from Gerard de Geer Glacier in Isfjord (left marking in Fig. 22).
Remote deployment and retrieval
Remote deployments and retrievals were carried out near glacier termini as shown in Fig. 25. The testing took place from marine vessels in calm weather and within line-of-sight of the measurement location. GPS data showed a maximum distance between operator and the ARC-TOP of approx. 1 km during testing. The profiler was able to correctly detect deployment and autonomously operate nominally.
Fig. 25.

Profiler delivery just prior to deployment (left), photo courtesy of Peter Bondo Christensen., and profiler retrieval after deployment (right), photo courtesy of Nils Risgaard-Petersen.
Performance assessment
The general performance assessment with reference to the listed requirements can be seen in Table 1.
During remote deployment the number of samples pr. vertical meter was found to be 3.51 m−1 (σ = 0.1 m−1), well within the requirement listed in Table 1. The dive velocity is 0.48 m/s (σ = 0.01 m/s).
The used Atlas Mini Conductivity Probe K 1.0 and EZO Conductivity circuit have been calibrated in-house after the cruise to determine whether the rated accuracy is governed by a poor calibration or general sensor performance. A two-point calibration was conducted in a small tank (150 L) with known temperature and salinity. A Guildline 8410A Portasal salinometer [33] was used as reference. Continuous circulation was ensured during sampling. A resulting expanded uncertainty of 0.07 mS/cm (α = 0.05) was calculated from a simple linear calibration curve at a measurement of 31 × 103 mS/cm. This result is significantly better than the manufacturer stated accuracy of ± 1 % i.e. 0.31 mS/cm [34], but not all sources of uncertainty have been identified and the total temperature and pressure range have not been investigated. This only serves as an indication that these cost-effective sensors can be used successfully with proper calibration.
During deployment near glacier termini high lateral displacement was observed. This negatively affects the operational success rate as the profiler can become trapped under sea ice or the glacier itself.
Handling the instrument proved possible but time-consuming as the pressure hull needs disassembly and assembly between deployments. This leads to increased wear of the sealing surfaces and higher risks of leakage, but recommendations to alleviate this are presented in the next section.
Future improvements
The ARC-TOP concept have been shown to be feasible in producing measurements in remote or hazardous areas. Areas of the design were identified for further development during testing to improve the system performance and usability.
Power and data transmission.
A revised power and data transmission system will improve the ease of use and reliability of the system. Key areas of improvement are:
-
1.
External power switch enabling cycling the power without the need to disassemble the profiler.
-
2.
External charging port to allow recharging the battery while it is installed in the profiler.
-
3.
Reduce the capacity of the battery to reduce the overall size. The current battery is highly oversized for the described mission.
-
4.Software for wireless data transmission to ground station with error detection.
-
a.The current electronics are fully capable of this without modifications.
-
a.
-
5.
Increased transmission range by optimizing antenna performance.
-
6.
Increased UAV range by optimizing UAV power system and signal transmission
Design
The general design of the concept can be improved in the following areas:
-
1.
Weight and size can be reduced further by adopting a design not made for repeated disassembly. This will be possible by making the changes to the power system outlined above. This will potentially reduce the electronic complexity by eliminating the need for two PCB’s in favor of a single PCB design.
-
2.
Both actuators are sensitive to the flexibility and tolerances of its components. A machined assembly will mitigate this and thus improve reliability and handling.
-
3.
External cabling on the ARC-TOP is a major risk of leak due to damage during assembly and usage. Improved cable insulator quality and protection should be considered as well as reducing the cabling length.
-
4.
Reduce PU tubing diameter connected to Simple Penetrators for increased flexibility and ease of assembly.
-
5.
Increasing visibility while the profiler is at the surface for easy visual detection in the event of GPS or signal transmission failure.
Production
-
1.
Changing currently 3D-printed parts to injection-molded parts will significantly increase the strength and durability of the instrument while simplifying assembly. This will however increase costs at low production volumes.
Ethics statements
Not relevant.
CRediT authorship contribution statement
Ebbe Poulsen: Writing – original draft, Project administration, Investigation, Software, Formal analysis. Mathias Eggertsen: Validation, Investigation, Formal analysis, Project administration. Erik H. Jepsen: Validation, Investigation, Project administration. Claus Melvad: Supervision, Funding acquisition, Conceptualization, Writing – review & editing. Søren Rysgaard: Investigation, Writing – review & editing, Supervision, Funding acquisition, Conceptualization.
Declaration of Competing Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Acknowledgments
Acknowledgments
We gratefully acknowledge the contributions of the Arctic Research Centre (ARC), Department of Biology and Department of Mechanical and Production Engineering at Aarhus University. The Danish Centre for Marine Research (DCH) and Aage V. Jensen Foundations is acknowledged for financial support to access the field.
The employees of the workshop “Prototypeværkstedet” at Navitas, Aarhus has been of great help during design and construction of the ARC-TOP concept.
Dan Carlson is acknowledged for early discussions in the concept of reusing XCTD and we acknowledge Egon Randa Frandsen for logistics and operations.
Finally, we acknowledge the great support provided by the Royal Danish Navy and the entire crew aboard the inspection vessel Knud Rasmussen.
Biographies

Ebbe Poulsen: Student, Mechanical engineering – Aarhus University

Mathias Eggertsen: Student, Mechanical engineering – Aarhus University

Erik Hinge Jepsen: Student, Mechanical engineering – Aarhus University

Claus Melvad: Professor, Department of Mechanical and Production Engineering – Aarhus University, ORCID: 0000-0002-5720-6523, Research Areas: Mechatronics/robotics, Metrology & Sensor development

Søren Rysgaard: Professor, Arctic Research Center – Aarhus University, ORCID: 0000-0003-1726-2958, Research Areas: Arctic system science, physical, chemical and biological oceanography
References
- 1.J. Mortensen, S. Rysgaard, J. Bendtsen, K. Lennert, T. Kanzow, H. Lund and L. Meire, Subglacial Discharge and Its Down‐Fjord Transformation in West Greenland Fjords With an Ice Mélange. Journal of Geophysical Research: Oceans, 125(9) (2020) e2020jc016301. https://doi.org/10.1029/2020JC016301.
- 2.Mankoff K.D., Straneo F., Cenedese C., Das S.B., Richards C.G., Singh H. Structure and dynamics of a subglacial discharge plume in a Greenlandic fjord. J. Geophys. Res. Oceans. 2016;121(12):8670–8688. doi: 10.1002/2016JC011764. [DOI] [Google Scholar]
- 3.Kimball P., Bailey J., Das S., Geyer R., Harrison T., Kunz C., Manganini K., Mankoff K., Samuelsen K., Sayre-McCord T., Straneo F., Traykovski P., Singh H. 2014 IEEE/OES Autonomous Underwater Vehicles (AUV) 2014. The WHOI Jetyak: An autonomous surface vehicle for oceanographic research in shallow or dangerous waters. [Google Scholar]
- 4.Blue Robotics Inc, Potted Cable Penetrator. https://bluerobotics.com/store/cables-connectors/penetrators/penetrator-vp/, 2021 (accessed 21.12.21).
- 5.Blue Trail Engineering LLC, Simple Penetrator. https://www.bluetrailengineering.com/product-page/simple-penetrator, 2021 (accessed 21.12.21).
- 6.WEST SYSTEM, G/Flex 650 Toughened Epoxy. https://www.westsystem.com/specialty-epoxies/gflex-650-toughened-epoxy/, 2021 (accessed 21.12.21).
- 7.Blue Robotics Inc, Subsea Buoyancy Foam: R-3318. https://bluerobotics.com/store/watertight-enclosures/buoyancy/float-r3318-r1/, 2021 (accessed 21.12.21).
- 8.R. Jehangir, Uncoated or coated LAST-A-FOAM, https://discuss.bluerobotics.com/t/uncoated-or-coated-last-a-foam/540/2, 2016 (accessed 21.12.21).
- 9.Conrad Elektronik Norden AB, Sony US18650VTC6 Special-batteri 18650 Højstrømskompatibel, Flat-Top Litium 3.7 V 3000 mAh. https://www.conradelektronik.dk/p/sony-us18650vtc6-special-batteri-18650-hjstrmskompatibel-flat-top-litium-37-v-3000-mah-1499574, 2021 (accessed 21.12.21).
- 10.Blue Robotics Inc, Celsius Fast-Response, ±0.1°C Temperature Sensor (I2C). https://bluerobotics.com/store/sensors-sonars-cameras/sensors/celsius-sensor-r1/, 2021 (accessed 21.12.21).
- 11.Blue Robotics Inc, Bar30 High-Resolution 300m Depth/Pressure Sensor. https://bluerobotics.com/store/sensors-sonars-cameras/sensors/bar30-sensor-r1/, 2021 (accessed 21.12.21).
- 12.Atlas Scientific, Mini Conductivity Probe K 1.0. https://atlas-scientific.com/probes/mini-e-c-probe-k-1-0/, 2021 (accessed 21.12.21).
- 13.Atlas Scientific, EZO™ Conductivity Circuit. https://atlas-scientific.com/embedded-solutions/ezo-conductivity-circuit/, 2021 (accessed 21.12.21).
- 14.Pjrc.com LLC, Teensy® 4.1 Development Board. https://www.pjrc.com/store/teensy41.html, 2021 (accessed 21.12.21).
- 15.Arduino, Arduino. https://www.arduino.cc/, 2021 (accessed 21.12.21).
- 16.HOPE Microelectronics CO., RFM98W RF Transceiver. https://www.hoperf.com/modules/lora/RFM98.html, 2018 (accessed 21.12.21).
- 17.Semtech, What are LoRa® and LoRaWAN®? https://lora-developers.semtech.com/documentation/tech-papers-and-guides/lora-and-lorawan/, 2021 (accessed 11.01.22).
- 18.Blue Robotics Inc, Subsea LED Indicator. https://bluerobotics.com/store/thrusters/lights/indicator10-asm-r1/, 2021 (accessed 21.12.21).
- 19.Adafruit, Adafruit INA260 High or Low Side Voltage, Current, Power Sensor. https://www.adafruit.com/product/4226, 2021 (accessed 11.01.22).
- 20.Blue Robotics Inc, SOS Leak Sensor. https://bluerobotics.com/store/sensors-sonars-cameras/leak-sensor/sos-leak-sensor/, 2021 (accessed 21.12.21).
- 21.blue Robotics Inc, SOS Probes. https://bluerobotics.com/store/sensors-sonars-cameras/leak-sensor/sos-probes/, 2021 (accessed 21.12.21).
- 22.Quectel, GNSS L86. https://www.quectel.com/product/gnss-l86, 2021 (accessed 21.12.21).
- 23.DJI, DJI Digital FPV System. https://www.dji.com/fpv, 2021 (accessed 21.12.21).
- 24.MaxBotix Inc, MB1242 I2CXL-MaxSonar-EZ4. https://www.maxbotix.com/ultrasonic_sensors/mb1242.htm, 2021 (accessed 21.12.21).
- 25.Microsoft, Visual Studio Community. https://visualstudio.microsoft.com/vs/community/, 2022 (accessed 07.01.22).
- 26.Visual Micro Limited, Arduino IDE for Visual Studio. https://www.visualmicro.com/, 2020 (accessed 07.01.22).
- 27.DuPont, MOLYKOTE® 111 Compound. https://www.dupont.com/products/molykote-111-compound.html, 2020 (accessed 05.01.22).
- 28.Blue Trail Engineering LLC, Simple Penetrator SPN-110X Instructions. https://static.wixstatic.com/ugd/e4c7c5_1a4ee1ec2a184b3fb3604493088d15ff.pdf, 2019 (accessed 05.01.22).
- 29.Quectel, L86 Hardware Design. https://docs.rs-online.com/1fe5/0900766b8147dbfb.pdf, 2014 (accessed 05.01.22).
- 30.AMETEK Inc, T-900 Series (Systems A, B, and H). https://www.ametekcalibration.com/products/pump-systems/pneumatic-hand-pumps/t-900-series-pneumatic-hand-pump, 2017 (accessed 05.01.22).
- 31.AMETEK Inc, HPC40 Series Pressure Calibrator. https://www.ametekcalibration.com/products/pressure/pressure-calibrators/hpc40-series-pressure-calibrator, 2017 (accessed 05.01.22).
- 32.Blue Robotics Inc, Mityvac Hand Operated Vacuum Pump. https://bluerobotics.com/store/watertight-enclosures/enclosure-tools-supplies/vacuum-pump-kit-r2-rp/, 2022 (accessed 05.01.22).
- 33.Guildline Instruments, 8410A. https://www.guildline.com/oceanography/salinometers/salinity-measurement/8410a-portasal-portable-salinometer, 2022 (accessed 22.03.17).
- 34.Atlas Scientific LLC, Conductivity Accuracy Graph. https://files.atlas-scientific.com/conductivity_accuracy_graph.pdf, n.d. (accessed 07.01.22).