

Abstract
The simplicity, transparency, reliability, high efficiency and robust nature of PID controllers are some of the reasons for their high popularity and acceptance for control in process industries around the world today. Tuning of PID control parameters has been a field of active research and still is. The primary objectives of PID control parameters are to achieve minimal overshoot in steady state response and lesser settling time. With exception of two popular conventional tuning strategies (Ziegler Nichols closed loop oscillation and Cohen-Coon's process reaction curve) several other methods have been employed for tuning. This work accords a thorough review of state-of-the-art and classical strategies for PID controller parameters tuning using metaheuristic algorithms. Methods appraised are categorized into classical and metaheuristic optimization methods for PID parameters tuning purposes. Details of some metaheuristic algorithms, methods of application, equations and implementation flowcharts/algorithms are presented. Some open problems for future research are also presented. The major goal of this work is to proffer a comprehensive reference source for researchers and scholars working on PID controllers.
Keywords: PID controller, Tuning, Metaheuristic algorithm, Softcomputing, Machine learning
PID controller; Tuning; Metaheuristic algorithm; Softcomputing; Machine learning
1. Introduction
Over the years, feedback control mechanisms have established a very strong impact in the fields of manufacturing, robotics, aviation and process control. Several efficient, robust and adaptive controllers (Brogliato and Lozano, 1994; Grimm et al., 2007; Kaloust and Qu, 1997; Lazar and Heemels, 2009; Rakovic et al., 2006) have been proposed aside proportional-integral-derivative (PID) controller. However, the acceptance and reputation of PID controllers in control systems is incomparable and supreme. PID control system can be implemented or applied in different modes (proportional only (P-mode), proportional and integral (PI mode), proportional and derivative (PD-mode) and proportional, integral and derivative (PID mode)) depending on process requirement (Lipták, 2002; Bharat et al., 2019). Several works have reported applications of typical PID controllers for different systems (Ramachandran et al., 2018; Elsrogy et al., 2013; Prasad et al., 2014; Wang, 2011).
PID controllers have been in use for many years in industries for process control applications. The use of PID controllers can be dated back to 1890s. Despite its long time of existence, PID controllers still remain the most popular controllers in both process and manufacturing industries today. Furthermore, research on PID controllers indicates that about ninety percent (90%) of process industries employ PID as controllers (Bansal et al., 2012; Abbasi and Naghavi, 2017). This popularity is as a result of their robustness, simplicity and ease of retuning control parameters (Åström and Hägglund, 1995; Abbasi and Naghavi, 2017). PID controller has been conventionally regarded as the best controller in the absence of fundamental process knowledge (Abbasi and Naghavi, 2017; Bennett, 1993). Despite these advantages of PID controllers, they are also faced with some shortcomings which include: unwanted speed overshoot and sluggish response as a result of unexpected variation in load torque and sensitivity to controller gains and as identified by Kushwah and Patra (2014). The success of PID controller bases on accuracy of system models and variables.
Controller tuning is a long standing and important aspect of feedback controllers. Hence, making the area of controller tuning a significant area of research both in academics and industries. The exploration and investigation of dynamic systems to create efficient, reliable and promising controllers are related to control engineering. After the development of PID control, numerous interests on tuning techniques that assure excellent performance of PID controllers sprang up. Furthermore, drawbacks of PID control strategy typically for nonlinear systems, include: challenges in choosing suitable and correct controller gains, and process termed tuning. The challenges commonly lie in choosing appropriate controller gains if set less than required, the control objective may never be achieved. While using excessively large controller gains may cause system instability, it is a viable option (Abbasi and Naghavi, 2017).
The first PID controller parameters tuning rules was introduced by Ziegler and Nichols (1942), several other tuning rules were proposed later. Though, some of these proposals focused on linear systems stabilization (Åström and Hägglund, 1995), which are not appropriate for nonlinear dynamic models. Conversely, some of these techniques encompass nonlinear systems (Lozano et al., 1999) with the goal of obtaining control variables that satisfy stability criteria. Conversely, the latter strategies do not assure definite response characteristics. Thus, one major difficulties and concern in control engineering area is appropriate controller parameters tuning. Controller variables are tuned to stabilize closed-loop control system and to achieve objectives which are related to stability, durability, performance tracking, performance measurement, noise reduction, disturbance rejection and robustness against environmental uncertainties.
Given a set of objectives, there are several types of tuning strategies for PID controller. Several authors and scholars presented different classifications of PID tuning strategies. Moradi (2003) and Johnson and Moradi (2005) classified PID tuning strategies relying on availability of a process model and model type. These classifications are grouped into four (4) subgroups namely:
-
i.
Model free methods: In these methods, there is no existence of a model or particular points of process identified. Hence, do not apply explicit identification important model points or parametric model as such.
-
ii.
Non-parametric model methods: These methods employ only a partial modeling information normally, steady state representation and critical frequency locations. The techniques are most appropriate for online application. They are typically used without needing extensive a priori plant information.
-
iii.
In-depth data methods: These techniques are midway amid parametric and non-parametric strategies. They use process data for tuning as used in subspace strategy or grey knowledge in fuzzy logic systems.
-
iv.
Parametric model methods: These methods require availability of model data, and can be obtained using standard offline or online identification process. They need a linear model of the system and its transfer function matrix/space model. These techniques are more appropriate for offline PID tuning. The parametric strategies can be classified into Non-Optimal Parametric, optimal (Restricted Structure control) and optimal (control signal matching) Methods.
A more comprehensive, detail discussion and application strategies of this classification can be obtained in Moradi (2003); Johnson and Moradi (2005).
Also, another classification of PID parameters tuning can be found in Bansal et al. (2012). These methods can be generally categorized into classical and computational techniques as presented in Bansal et al. (2012):
-
i.
Classical Techniques: These methods are centered on making some assumptions about plant model and required output. They try to extract some system features analytically or graphically, which are then utilized to pick controller settings. These methods are simple to use, computationally efficient, and can be used as a first step in parameter adjustment. However, the controller settings often give desired results directly, this is as a result of assumptions made. Hence, further tuning is required. Some of these classical tuning methods include Ziegler and Nichols, 1942, Ziegler and Nichols, 1993 method and Cohen (1953) method.
-
ii.Computational or Optimization Techniques: These techniques involve the use of data modeling and optimization of a cost function strategies to tune PID parameters. These methods of controller parameters depend on a cost function which they attempt to minimize. There are six (6) generally used cost functions for PID controller parameters tuning. These commonly used cost functions are:
-
(a)Integral Absolute Error (IAE) defined as
(1) -
(b)Integral Square Error (ISE) expressed by
(2) -
(c)Integral Time Absolute Error (ITAE) represented as
(3) -
(d)Integral Time Square Error (ITSE) denoted as
(4) -
(e)Mean Square Error (MSE) defined as
(5) -
(f)Integral Error (IE) given as
(6)
-
(a)
Some examples of computational or optimisation techniques are Artificial Immune System algorithm (Kim et al., 2002; Shatnawi and Quwaider, 2019; Quwaider and Shatnawi, 2020), Simulated annealing (Haber et al., 2007) and Particle Swarm Optimization (PSO) (Bassi et al., 2011). Computational strategies are employed for self tuning or automatic tuning of PID controller parameters. While a broader classification based on nature and usage can be classified in five (5) categories (the composition can be found in Rodríguez-Molina et al. (2020); Villarreal-Cervantes and Alvarez-Gallegos (2016); Ang et al. (2005)):
-
i.
Analytical methods: These methods involve analysis of closed loop model to attain stability. It involves computation of relationship between a given plant model and the set objective to determine appropriate PID parameters. Examples of these strategies may include Lyapunov (Li et al., 2009) and root locus approaches (Baker, 2011), where the latter is employed for linear systems and the former is used for nonlinear systems or frequency response. Other analytical methods include internal model control or lambda method.
-
ii.
Heuristic methods: Heuristic strategy of PID tuning is progressed with practical experience where controller variables are manually selected reliant on experimental knowledge of a professional designer who utilizes information of controlled variable estimates to set up correct variable-performance relationships. The heuristic method can also serve as a formula or a rule base for online tuning habitually with tradeoff in design goals or objectives. The most popular of these methods are the conventional Ziegler–Nichols and Cohen–Coon as depicted in (Rodríguez-Molina et al., 2020; Kumar et al., 2015; Ho et al., 1996).
-
iii.
Frequency response methods: These methods for PID parameter tuning are habitually offline and popular in the academic arena. The technique is based on the characteristics of target process or system such as loop shaping as reported in Ang et al. (2005). Natarajan and Gilbert (1997) and Wang et al. (1999) presented the use of frequency response for tuning PID controller parameters. Hagglund and Astrom presented adaptive techniques on frequency response to tune PID controller in Hägglund and Åström (1991).
-
iv.
Optimization methods: These strategies of PID controller tuning can be considered as an exceptional style of feedback optimal control system. PID variables are acquired on impromptu basis using an offline mathematical programming or numerical optimization technique for singular objective. The computation can also be implemented using computerized heuristics or evolutionary algorithms for multiple design objectives. The process involves stating a mathematical programming problem (MPP) for a targeted plant and employing optimization techniques to solve it. The main attribute of these methods is that control parameters are fixed and acquired by the solution of an offline numerical optimization method. Offline numerical optimization technique uses the derived state vector of plant by simulation or the real plant vectors. The obtained fixed control parameters are then added to a closed-loop system. This review fall to this class of tuning. Some recent optimization techniques for PID tuning may include; Firefly algorithm (dos Santos Coelho and Mariani, 2012), chaotic optimization (dos Santos Coelho, 2009), evolutionary multi-objective optimization (Nisi et al., 2019), PSO (Azar et al., 2019) and glow-worm optimization (Pilla et al., 2019).
-
v.
Adaptive tuning methods: The adaptive tuning strategies are online real-time tuning methods which involve the use of automated online mechanisms to tune PID controller parameters gains. The key feature of these techniques is that control parameters vary over preset time interval in the closed-loop system. Application of this technique can be found in (Pirabakaran and Becerra, 2001; Kim and Cho, 2005; Chang et al., 2003).
The complexity of plant dynamics depicts the effort or difficulty of tuning the controller parameters (Bernstein, 2002). Plant dynamics can be equipped with nonlinearity behavior, several tunable variables, and enormous numbers of input and output variables (Rodríguez-Molina et al., 2020). Furthermore, difficulties can be as a result of environmental and or operational uncertainties and perturbations. These features contribute to the difficulty of obtaining appropriate or suitable controller parameters geared towards achievement of set performance objectives. Additionally, existing applications require meeting numerous performance conditions/requirements at once, and are usually in conflict (Boyd et al., 1990). Some of these performance requirements may include: high performance accuracy, efficiency in energy consumption, low cost just to mention a few among others. Hence, tuning of controller parameters becomes a significant task since the level of satisfaction is determined by controller parameter settings.
Problems associated with several demand controller calibration can be handled as a multi-objective mathematical programming problem which can be solved using optimization or adaptive-optimization tuning approaches. This method permits the use of multi-objective optimization strategies to obtain a set of accurate controller settings with diverse trade-offs. These trade-offs are as a result of their compatibility with tuning performance conditions. As such operators, designers or decision makers need to select suitable configurations in accordance with the application demands depending on preferences.
The intricacy of multi-objective mathematical programming problems, otherwise termed as Multi-Objective Problem (MOP) with regards to controller parameters tuning function, has necessitated the employment of Computational Intelligence (CI) or soft computing approaches (Ruano et al., 2014). The implementation of CI for multi-objective optimization in control engineering is termed intelligent control (Rodríguez-Molina et al., 2020). Metaheuristic algorithms have been intensively employed to resolve several optimization problems in different fields of endeavor today. Some of these applications can be seen in Mathematics (Stojanović et al., 2017), robotics (Cruz-Bernal, 2013), agricultural engineering (Qi and Altinakar, 2011), structural design (Mirjalili and Lewis, 2016), greenhouse gas emission (Geem, 2011), medicine (Dey and Ashour, 2018), image processing (Alsmadi, 2018) and telecommunication (Kumar and Vidyarthi, 2016). The acceptance and popularity of metaheuristic algorithms can be attributed to their concurrent and quite simple implementation, their ability to handle large complex problems at a reduced computational cost, and their wide usage in different areas of endeavor (Gogna and Tayal, 2013; Talbi, 2009). These aforementioned qualities of metaheuristic algorithms make them appropriate substitutes for controller parameters tuning problem. Metaheuristic algorithms have a track record of outstanding performance and superiority in controller parameters tuning.
The diversity of various assortments of existing dynamic models and controller structures or architectures necessitates a wide range of distinct tuning MOP(s). These problems entail the application of diverse kinds of metaheuristics algorithms with specific search mechanisms to acquire the most appropriate or right controller settings. Thus, based on these assertions, this study seeks to give a comprehensive review on metaheuristic algorithms used for PID controller parameters tuning. Furthermore, in specific terms, the contribution of this work include:
-
i.
Comprehensive evolutionary background study of PID controller, its most important features, the evolution, developments and application strategies.
-
ii.
Detailed background of metaheuristic algorithms and their classification, application flowcharts and implementation processes.
-
iii.
Survey of PID controller tuning methods and their limitations.
-
iv.
Presented an elaborate study of several techniques applied to PID tuning and a phenomenal review of literatures on PID controller parameters tuning using metaheuristic algorithm over a period of 2000–2020.
-
v.
Exposed researchers to some powerful metaheuristic algorithms that are not yet explored in PID parameters tuning.
-
vi.
Identification of PID configuration problems.
The remainder of the paper is laid out as follows: Section 2 gives a succinct account of previous reviews, Section 3 is the background discussion, Section 4 describes the performance measures for evaluating the effectiveness of PID parameters tuning, Section 5 explains the metaheuristic algorithms that have found application in PID tuning, Section 6 is the comparative studies of existing tuning techniques used in PID tuning, Section 7 unveils open research problems in metaheuristic algorithms for PID tuning and future direction before concluding in Section 8.
To increase readability of manuscript and also enhance understanding of readers, the structure of this paper is depicted in Fig. 1.
Figure 1.

Pictorial representation of paper structure.
2. Literature review
This section presents a brief history and background of PID controller, architecture (block diagram), equations, issues and application areas.
2.1. Theory and architecture of PID controller
The PID controller is so called due to its output summation of three variables: proportional, integral and derivative terms which are denoted as , and . These parameters , and are reliant on error term e between input and output parameters. Correct tuning of these variables will enhance the dynamic reaction of a system, decrease overshoot, eradicate steady state error and increase stability of the process Saad et al. (2012). This relationship is described in Equation (7).
 |
(7) |
where and are P, I and D parameters respectively. and can be represented by Equation (8).
| (8) |
where and are reset time and derivative time, respectively. The reset and derivative times are responsible for a systems response type. The controller variables P, I and D properties are briefly presented and discussed as follows:
-
i.Proportional term (P): The proportional parameter facilitates the reaction as closed loop time constant declines with proportional parameter nonetheless ensures no alteration in system order as the output is just proportional to the input. The proportional parameter reduces nevertheless does not eradicate steady state error, or offset. The main task of the proportional element is to examine the magnitude of error and the PID controller response proportionally. In proportional term P is denoted by Equation (9) as
where(9) : proportional part of controller output,
: proportional gain,
e: error term.
-
ii.Integral term (I): This parameter removes offset as it rises the nature and order of the system by 1. This parameter also rises the system reaction speed, but at the cost of continued oscillations. The integral control attempts to mitigate the issues of the proportional control. It studies the error over time and adjust (increase) a small error with time. Reset rate, which is a time factor, is used to denote adjustment of integral control.
where(10) : is the integral part of controller output,
: reset time or integral time,
: integral gain, e: error term.
-
iii.Derivative term (D): This setting essentially reduces the system's oscillatory reaction. It has no effect on the offset, and has no effect on the system's nature and order. It investigates the error signal's rate of variation. A bigger system reaction to a rapid pace of change is caused by the derivative. The derivative term is adjusted with time. Too much of derivative term may cause an erratic control or overshoot. It is denoted by Equation (11).
where
(11) : is the derivative part of controller output,
: derivative time,
: derivative gain, e: error term.
Fig. 2 depicts the standard configuration of a PID control system. When the set value changes, the error term between the set value and the actual output is recalculated. The error signal or term is utilized to construct the , , and parameter actions, with the resulting signals weighted and summed to make the control signal applied to the plant model. The output signal is obtained as a result. The controller will receive this updated genuine signal, and the error signal will be recalculated. The plant receives the newly received control signal, . This process will run indefinitely until it encounters a steady-state mistake.
Figure 2.

Fundamental PID control structure.
The PID control technique is a typical approach to control that uses a proportional factor (P), integrative action (I), and differential action (D) to convert error signals into input signals. The error signal is calculated by comparing the states to their corresponding references (set points). To improve the speed of the system's response to its defect, the error signal is amplified with proportional gain and understood as current error term (Muliadi and Kusumoputro, 2018). The error signal is also integrated with the integral gain as the accumulation of the past error term and differentiated with the derivative gain as the prediction of future error term in parallel (Mange et al., 2015). These gains are fine-tuned using tuning methods based on a linear mathematical model of the system's dynamics. For systems with a modest amount of nonlinearity and perfect uncoupling between the modes of their dynamics, the PID gains can be simply modified.
2.2. Operation modes of PID controllers
The PID controller is a widely used industrial control structure with a common control loop feedback mechanism. PID controllers are the most generally used feedback controllers (Kushwah and Patra, 2014). It is worthy to note that majority of PID controllers are operated in either manual or automated state.
-
i.
Manual Mode: Here, the output of controller is manipulated by an experienced who manipulates the controller parameters by pushing buttons which will either increase or decrease the controller output.
-
ii.
Automatic Mode: Controller parameters can be attuned during operation by the use of algorithms.
When variations in modes and terms are observed, it is imperative to stop changing transients. Meanwhile, PID controllers are dynamic systems, hence essential to ascertain state of the scheme is accurate before changing modes of operation. In automatic state, PID algorithm yields a control variable which may be distinct from manually created variable. Consequently, it is essential for operator(s) to ascertain both control terms match during switching. This process is referred to as bumpless transfer. Details of switching from one mode to another can be found in Anthony and Ho (2020).
2.3. PID performance evaluation
The acceptance and wide use of PID controllers has led to an explosion in methods of tuning its parameters. In the past decades, numerous proposals on PID parameters tuning have been published. Some of these proposals are focused on stable processes (Cohen, 1953; Zhuang and Atherton, 1993), integrating and unstable processes Tan et al. (1999) and multivariate processes (Luyben, 1986). Based on this, a natural question emanated: how can PID setting from different strategies be compared? In other words, what is the performance of a controller to be examined or measured? To answer this question, several researchers and authors have proposed and presented different measures to address the issue of performance measurements.
In the past decades, minimum variance (Huang and Shah, 1999; Harris, 1989), as a standard, have been used as criteria in process control to assess closed loop performance (Tan et al., 2004). A comprehensive review and assessment on minimum variance can be seen in Qin (1998); Huang et al. (1997).
Although minimum variance is a highly prized metric of system performance, it pays little heed to traditional metrics like setpoint tracking and disturbance rejection. Furthermore, another vital and important aspect of system performance, robustness, is not directly addressed. Obviously, a benchmark that can be used for single- and/or multi-loop processes that are stable, integrating, or unstable would be quite useful. The benchmark should include both time domain and frequency domain robustness requirements (Tan et al., 2004).
Tan et al. (2004) further suggested the use of integral error as a good measure for single loop process and gain-phase margin for robustness measure. However, these methods are not suitable for multi-loop processes. The use of integral error and gain-phase measure with different tuning methods can be seen in Huang and Shah (1999).
The most commonly used performance indices or measures employed in control system applications are Integral Absolute Error (IAE) (Equation (1)), Integral Square Error (ISE) (Equation (2)), Integral Time Absolute Error (ITAE) (Equation (3)), Integral Time Square Error (ITSE) (Equation (4)), Mean Square Error (MSE) (Equation (5)) and Integral Error (Equation (6)). The application of ITAE for PID tuning can be seen in Martins (2005); da Silva et al. (2019). Jin et al. (2018) evaluated disturbance rejection performance for multiple objectives using IAE to estimate time response of process. Soni and Bhatt (2013) used ISE, IAE, IATE and MSE indices with BF-PSO to optimize PID controller. The performance and robustness trade-offs of PID control using IE and IAE can be seen in Garpinger et al. (2014). A comparison of ISE, IAE, ITAE and MSE using a heating tank was presented in Hussain et al. (2014).
2.4. Related works
There is still a rapid increase in the interest being shown by the academic and global research communities on PID parameter tuning. This segment presents related reviews that have been presented in literature on same subject area. This format is adopted to enhance articulation of issues (gaps) yet to be addressed or not fully addressed and to highlight differences with current review.
Bhawana and Neelu (2017) presented an appraisal of traditional as well as present methods employed for tuning PID controller parameters. The work presented different PID controller tuning procedures existing in literature and gave assessment of some methods. These methods can be typically grouped as classical methods and optimization methods. The methods appraised are classified into either traditional methods designed for tuning PID controller or heuristic methods of tuning. The methods proposed for tuning PID controller for processes like coupled tank system, trajectory tracking of Unmanned Aerial Vehicle (UAV), quadrotor stabilization are as well appraised.
Gholap et al. (2017) presented a review paper comparing different algorithms based on time domain analysis, acquired tuned parameters, iteration number and fitness function values. Two distinct process plants were considered based on ITAE and time domain analysis as objective functions. Variations in values of tuning parameters were considered using two systems and cost functions. Tuning parameters were obtained for both systems using Genetic Algorithm (GA), Particle Swarm Optimization (PSO), and Simulated Annealing (SA). Assessment for all the three algorithms was conducted with gotten tuning variables, time domain analysis, number of iterations, and value of cost functions. Closed loop responses of individual arrangements were plotted. Process with SA-PID variables settles down fast compared to PSO and GA, however its peak overshoot is higher. PSO-PID tuned system variables highest overshoot is least. PSO and SA out performed GA system with GA settling slowly with more overshoot and larger minimum cost function value. PSO algorithm converges fast as compared to SA, also cost minimization is better in PSO. Different algorithms may not yield the same results after implementing with same system and objective function.
In this paper (Srinivas et al., 2014), the results of the GA-PID controller for different tuning techniques employing three tank level process control systems were compared to the classic PID controller. Using computer simulation, this comparison analysis was performed for set point tracking of process plant procedures. Using Matlab, the optimal tuning variables of a PID controller were evaluated using six tuning methodologies (Z-N technique, C-C technique, ISE, IAE, IATE, and genetic algorithm centered PID methodology). The GA-PID controller produces a rapid reaction with less peak overshoot and integral square error, according to simulation results. Furthermore, this technique has a fine capacity to modify tuning variables for system dynamics variations. In conclusion, the GA-PID controller has been shown to be a reliable solution for controlling three tank levels. This method can also be used in a variety of nonlinear process control systems with long transportation lags.
Emmanuel and Inyiama (2015) conducted a survey on robot manipulator controller design strategies that can function optimally in harsh environs. PID controller tuning approaches like the conventional Ziegler Nichol's (ZN) software tool, fuzzy logic, GA, and Artificial Neural Network (ANN) approaches were studied. The study concluded that it is challenging to attain optimal performance using conventional and ZN technique. Fuzzy logic, GA and ANN approaches can be employed to attain anticipated optimal performance but they lack factors to calculate disturbance elimination settling time which aids to measure how fast the system can cancel or reject disturbance in harsh environments. Conversely, software tool scheme using PID tuner can be utilized to attain anticipated performance and good disturbance rejection settling time which satisfies the goal of design.
Fister et al. (2016) did a study on two reactive evolutionary algorithms (differential evolution and genetic algorithm), and four reactive, swarm intelligence-based algorithms (bat, hybrid bat, PSO and Cuckoo Search (CS)), were employed to tune PID controller in the comparative study. Only ten individuals and ten iterations (generations) were utilized in order to choose the most suitable optimization algorithm for fast tuning of controller parameters. The results were compared using statistical analysis and showed that PSO is the best option for such a task.
A survey on PSO and automated voltage regulators for synchronous generators was presented by Dixit and Pragati Joshi (2016). The generator is utilized to maintain electrical appliance control and stability. Automatic Voltage Regulators (AVR) employ a variety of ways. Diverse controllers are also utilized to improve robustness, overshoot, rise time, and voltage control, however the issue is with the AVR survey. According to several research paper analyses, assessment studies focusing on PID Controller are conducted to demonstrate rise time, overshoot, and undershoot.
Kim and Cho (2006) suggests a hybrid technique for adjusting a PID controller for an AVR that combines GAs and Bacterial Foraging (BF). The proposed method was first demonstrated using four test functions, and the algorithm's outcome was evaluated with a focus on mutation, crossover, step size variation, chemotactic steps, and bacteria life duration. Furthermore, the proposed algorithm was used to calibrate an AVR's PID controller. GA, PSO, GA-BF, and GA-PSO are among the algorithms compared.
Nagaraj et al. (2008) presents a survey on how PID controller variables are tuned for DC motor armature control. The performance of conventional procedures such as the continuous cycle approach and the ZN step response methodology was compared and analyzed with intelligent tuning strategies such as the GA, Evolutionary Programming (EP), and PSO. Tuning methods based on GA, EP, and PSO have demonstrated their superiority by achieving better results. They increased the performance indices and steady state characteristics.
Zulu and John (2014) reviewed some conventional control algorithms used on quadrotors in studies. Clearly, no single algorithm can provide the greatest of all essential features, as evidenced by the evaluation. It has been determined that achieving superior performance often demands hybrid control structures with the best combination of robustness, adaptability, optimality, simplicity, tracking ability, fast reaction, and disturbance rejection, among other things. However, such hybrid structures do not guarantee the optimal performance; consequently, for any control application, a compromise must be found as to which of the components is the most appropriate. The assessors are still undecided on which mathematical model will provide the best overall performance. PID, Linear Quadratic Regulator (LQR), Sliding mode, Backstepping, Feedback linearization, Adaptive, Robust, Optimal, L1, , Fuzzy logic, and ANN have all been appraised after a brief description of the system. The article concludes with a recommendation to examine hybrid systems, which integrate advantages from many control paradigms.
Divya and Nirmalkumar (2018) in their paper titled “A Survey on Tuning of PID Controller for Industrial Process Using Soft Computing Techniques” presented a review of some soft computing methods for PID controller parameters tuning. The review considered five (5) soft computing techniques, namely Neural Networks (NN), EP, GA, PSO and Ant Colony Optimization (ACO) methods. The survey gave some basic highlights of selected algorithms and presented their flowcharts. Details of implementation of selected algorithms were not presented.
Bharat et al. (2019) presented a review of PID tuning method. The paper presented a survey on works related to PID controller tuning methods using fuzzy-logic and GA. Also, a comparison of conventional two methods (ZN and process reaction curve) and fuzzy-logic based tuning methods was presented. A brief review of tuning methods like Fuzzy Set-Point Weight (FSPW), GA, fuzzy logic, ZN, and PRC were presented.
A review on tuning techniques for PID controllers was presented in Bansal et al. (2012). The work presented a review on current and classical technique for PID tuning. The work gave a brief description of two main classifications of tuning strategies namely classical and computational or optimization techniques. On classical method, Ziegler and Nichols method, and Cohen Coon method were presented. Artificial Immune Systems (AIS), ACO, Bacteria Forage Technique (BFT), GA, Differential Evolution (DE), EP, ANN, SA, Support Vector Machine (SVM), PSO, Fuzzy logic, and Response Surface Method (RSM) were among the topics discussed. The work presented relevant equations, algorithms and flowcharts for every algorithm considered in the study. A good number of works implementing such algorithms for PID tuning was also presented.
Kushwah and Patra (2014) presented a review on tuning techniques using soft computing strategies. The study was focused on DC motor speed control using PID controller. The study gave a brief discussion on PID controller, its pictorial representations and parametric equations. The review was focused on GA, PSO, and fuzzy logic soft computing techniques for DC motor speed control. The paper only briefly highlighted on a few works that implemented the selected algorithms.
The study in Jain et al. (2012) titled “A Review of Soft Computing Techniques for PID Controller Tuning” presented a review of three soft computing algorithms (GA, ACO, and PSO) for tuning PID parameters. The study presented algorithms for each technique and also gave a little background information on the three algorithms chosen.
A review of how swarm intelligence computation algorithms can be used to tune PID controllers was presented in Ghosal et al. (2012). The study highlighted on different structures of PID controller and presented a survey on swam intelligence computation. The study further listed the advantages of intelligence, and also gave reviews on tuning PID parameters using ACO, PSO and Bacterial Foraging Optimization (BFOA). A comparative analysis of four (4) tuning methods (ZN, PSO, BFO and GA) using MATLAB was presented. Their analysis reported that BFOA gave a better result compared to others.
Despite the significance of metaheuristic algorithms in PID tuning, there is no comprehensive, complete and methodical review about their classification. Additionally, future problems and significant role of metaheuristic algorithms in PID tuning problem have not been itemized properly. In summary, reviewed papers have some shortcomings:
-
i.
Only a few literatures have been investigated.
-
ii.
Details of algorithms implementation are not explicitly defined.
-
iii.
Future studies and unanswered issues are not properly expressed.
-
iv.
Few qualitative and recent papers were cited.
-
v.
In some cases, only a few metaheuristic algorithms were explored.
-
vi.
Classification of studied techniques has not been adequately presented.
-
vii.
Advantages and disadvantages of selected works not clearly presented.
Further readings on metaheuristic algorithms reviews and taxonomies on other subject matters like: scheduling techniques in cloud computing (Kalra and Singh, 2015), vehicle routing problem and its variants (Elshaer and Awad, 2020), optimizing 3D well-path designs (Biswas et al., 2020), reactive power planning problem (Shaheen et al., 2018), optimization of Service-Level Agreement (SLA) violation costs for dynamic execution of cloud services (Kumar and Bawa, 2020), multi-objective virtual machine placement mechanisms in cloud computing (Donyagard Vahed et al., 2019), applications on PV cell parameter identification (Yang et al., 2020), solving grouping problems (Ramos-Figueroa et al., 2020) and hydropower energy optimization (Azad et al., 2020). A summary of related works is presented in Table 1.
Table 1.
Summary of previous related surveys.
| S/No | References | No of study referenced | Focus of review | Number of algorithms reviewed | Taxonomy (classification) |
|---|---|---|---|---|---|
| 1 | Bhawana and Neelu (2017) | 33 | Classical and Optimisation techniques used for PID tuning | 9 | Yes |
| 2 | Gholap et al. (2017) | 10 | PID controller tuning parameters, time domain analysis, number of iterations, and value of cost functions using GA, PSO, and SA. | 3 | No |
| 3 | Srinivas et al. (2014) | 16 | Optimum tuning parameters of PID controller are estimated by six tuning methods (Z-N method, C-C method, ISE, IAE, IATE and GA based PID method) for three tank level process for using Matlab/Simulink | 8 | |
| 4 | Emmanuel and Inyiama (2015) | 32 | PID controller tuning methods such as the manual, Ziegler Nichols, software tool, fuzzy logic, Genetic Algorithm (GA), and the Artificial Neural Network (ANN) | ||
| 5 | Fister et al. (2016) | 32 | PID controller tuning methods reactive using differential evolution, genetic algorithm, bat, hybrid bat, particle swarm optimization and cuckoo search | 6 | Yes |
| 6 | Dixit and Pragati Joshi (2016) | 8 | PID Controller tuning for Automatic Voltage Regulator using PSO and GA | 2 | No |
| 7 | Kim and Cho (2006) | 29 | PID controller of an AVR. using GA, PSO, GA-BF, GA-PSO | 4 | No |
| 8 | Nagaraj et al. (2008) | 9 | PID controller are tuned for controlling the armature controlled DC motor using Z-N (step response), Kappa-Tau Continuous cycling, EP, GA and PSO. | 6 | No |
| 9 | Zulu and John (2014) | 34 | PID control tuning for quadrotors using Linear Quadratic Regulator (LQR), Sliding mode, Backstepping, Feedback linearization, Adaptive, Robust, Optimal, L1, H∞, Fuzzy logic and Artificial neutral networks. | 12 | Yes |
| 10 | Divya and Nirmalkumar (2018) | 13 | Soft Computing Techniques for PID tuning using Neural Networks (NN), Evolutionary Programming (EP), Genetic Algorithm (GA), Particle Swarm Optimization (PSO), Ant Colony Optimization (ACO). | 5 | No |
| 11 | Bharat et al. (2019) | 15 | Techniques for PID tuning using Fuzzy Logic (FL), Genetic Algorithm (GA). | 2 | No |
| 12 | Bansal et al. (2012) | 64 | Review of tuning Techniques for PID parameters classification of tuning strategies using 14 methods (Z-N method, C-C method, AIS,ACO, BFO, DE, EP, ANN, SA, SVM, PSO, FL and RSM based PID method) | 14 | No |
| 13 | Kushwah and Patra (2014) | 43 | Speed control of DC motor using for PID controller using three tuning strategies GA, PSO, and fuzzy logic algorithms | 14 | No |
| 14 | Ghosal et al. (2012) | 51 | Swam intelligence computation for PID controller using four tuning strategies ZN, BFO, PSO, and GA | 4 | No |
3. PID controller tuning methods
A summary of tuning methods for PID controller is depicted in Fig. 3.
Figure 3.

Summary of PID tuning methods.
3.1. Classical methods of PID parameters tuning
This class of tuning strategy attempts to derive controller configurations for common models. To compute the dynamics of these systems, step response of systems is obtained (Bansal et al., 2012). This response is characterized by diverse equations, which leads to development of different classical approaches.
Before tuning PID parameters, it is crucial to obtain configuration using traditional approaches since the gains of controllers rely on transfer function variables. Although traditional PID tuning approaches are broadly used, oftentimes their behaviors do not match the set desired goal or objective (Reis et al., 2016).
-
i.
Ziegler-Nichols tuning method: Ziegler and Nichols proposed the most fundamental acknowledged and popular tuning technique in 1942 (Åström and Hägglund, 2004). Ziegler and Nichols conducted multiple studies and proposed rules for calculating , , and values based on a plant's transient step reaction. They presented two methods: closed-loop and open-loop. Process basic features such as process gain , process time constant , and process dead time are obtained using the ZN tuning approach. Ziegler and Nichols suggested using the values of , and for closed and open loops using different rules. The tables and equations can be seen in (Shahrokhi and Zomorrodi, 2013; Sorensen, 2007; Hahn, 2006).
-
ii.
Cohen-Coon tuning method: Cohen and Coon (Cohen, 1953) proposed a technique with PID controller parameters obtained through First Order Plus Time Delay (FOLPD) model. The key design condition is elimination of load turbulence. The controller parameter configuration is presented in (Cohen, 1953), while some application examples can be seen in Hambali et al. (2014); Azman et al. (2017). Regardless of a superior model, results of Cohen and Coon technique are not much superior than Ziegler Nichols approach.
-
iii.
Gain and Phase Method:Åström and Hägglund (1984) suggested a test that, in terms of ease of use in automatic loop tuners, was a significant improvement over the ZN test. They proposed replacing the variable proportional gain with a nonlinear function, with relay nonlinearity as the function.
Åström and Hägglund (1984) proposed a gain and phase strategy for getting specific spots on the Nyquist curve to aid in determining controller pretuning parameters to overcome the Z-N technique's trail by error limitation. The tuning method is based on the ability to move the critical point on the process Nyquist curve to a specific location. On the Nyquist plot, Åström and Hägglund (1984) proposed that this point be situated at unity gain and a phase of , where denotes the predicted phase margin and represents the desired gain margin. A control system's phase and gain margins are a measure of how close the system's polar plot is to the point.
There are other varieties or modifications of ZN tuning methods suggested by other researchers. Åström and Hägglund (2004) proposed an improved method of Ziegler and Nichols tuning with robust loop shaping strategy (McFarlane and Glover, 1992). Chien, Hrones, and Reswick (CHR) technique was created from original ZN Open Loop technique. It offers swiftest response without overshoot and also with 20% overshoot. This technique has capability for tuning the set point and disturbance. Details and application of CHR can be found in Sen et al. (2015). A comparison of several tuning strategies can be seen in Shahrokhi and Zomorrodi (2012).
4. Metaheuristic algorithms
Metaheuristic based strategies (Talbi, 2009) deals with problems by providing near optimal solutions within reasonable time. Due to its efficiency and effectiveness in solving vast and complicated issues, metaheuristics have exploded in popularity in recent years. Metaheuristics are a type of heuristic that performs better than simple heuristics. Meta implies “beyond” or “higher level”. Every metaheuristic algorithm employs a particular mix of local and global search. Different results are often realized through randomization. There is no standard or verifiable definition of heuristics and metaheuristics in the literature, regardless of whether metaheuristics are accepted. A number of academics and researchers utilize heuristics and metaheuristics interchangeably. Current developments, however, appear to apply to all stochastic algorithms that use randomization and global exploration as metaheuristics. This assessment will also adopt same convention.
4.1. Classification of metaheuristic algorithms
This section briefly explores and summarizes a comprehensive review of metaheuristic algorithms and their emergence. Metaheuristic algorithms can be categorized in several forms, depending on selected characteristics or features that distinguish them. Different authors and scholars classify metaheuristic algorithms considering different features or characteristics. The categorization could also be dependent or centered on objectives or goals of research.
Examples of this category may be found in Blum and Roli (2003) which divides metaheuristics into two categories: nature-inspired and non-nature-inspired. Whether it is a population or a single point search, whether the objective function is dynamic or static, memory utilization or memory-less approaches algorithm and one or more neighborhood structures, Mirjalili and Lewis in Mirjalili and Lewis (2016) classified metaheuristic algorithms into: evolutionary, physics-based, swarm-based and human-based algorithms. A further classification based on population is presented in Beheshti and Shamsuddin (2013); Nojhan (2007). Another classification can be seen in Jackson et al. (2018), metaheuristics can be divided into two types: single-solution and multiple-solution problems.
Several other taxonomies of metaheuristic algorithms can be seen in Kumar and Bawa (2018); Shaheen et al. (2018); DrEO et al. (2007); Beheshti and Shamsuddin (2013); Gogna and Tayal (2013); Hussien et al. (2020); Kumar and Bawa (2020); Abdel-Basset et al. (2018). Fig. 4 presents a summary of meta-heuristics algorithms classification/taxonomy. Furthermore, it is worthy to note that metaheuristic algorithms can be conveniently implemented for global optimization (BoussaïD et al., 2013).
Figure 4.

Summary of metaheuristic classification based on operational procedure.
4.2. Metaheuristic algorithms for PID tuning
Though analytical classical PID tuning techniques are extensively used, occasionally, their performance does not match to the desired results (Ribeiro et al., 2017; Reis et al., 2016). When an optimization approach is used to tune controllers, it is feasible to achieve controller gains to reach as quick as possible responses with reduced overshoot, resulting in errors in the steady-state regime that are close to zero (Ribeiro et al., 2017). It is legal to say that these algorithms are heuristic techniques, which means that they produce acceptable results even if they are not the best. Many controller gains can be discovered in the same system by simply restarting the study.
According to recent literature, heuristic algorithm-based optimization strategies have emerged as a potent tool for solving a variety of control engineering difficulties (Latha et al., 2013). Metaheuristic algorithms are extensively utilized in process control due to their architectural simplicity, good optimization capability, and fast response. When compared to traditional optimization approaches, metaheuristic algorithms are more efficient in solving higher-dimensional optimization problems. They can easily adapt to existing classical controller design methodologies because of their resiliency. Metaheuristic algorithms, regardless of model order, can be used as a basic mechanism for creating traditional and improved structured controllers for a group of unstable operational models.
In order to produce effective engineering applications, controllers are mechanisms that are utilized to govern the performance of dynamic systems. The main purpose of controllers is to ensure that the feedback of a dynamic system is balanced. Despite the fact that controllers are designed to create stability in principle, the way the system stabilizes in practice is determined by a collection of variables. These variables can be adjusted to satisfy a variety of performance requirements, such as shortening the stabilization time (Lequin et al., 1999), permitting recovery of stability under unpredictability or perturbation (Freeman et al., 1998), smoothing transition to stability (Hang et al., 1991).
Controller tuning, or the precise synchronization of controller variables, is a difficult process that is highly reliant on application needs. The common controller tuning challenge entails identifying a collection of controller variables that stabilizes dynamic system reactivity under a defined performance condition that meets the specified parameters (performance criteria). Engineering applications are becoming increasingly difficult with time, in the sense that they demand dynamic systems to meet a variety of competing needs (i.e., one requirement cannot be satisfied completely devoid of harming the achievement of others). As a result, fine-tuning controllers for complex and dynamic systems become a challenging effort or requirement. A GA for controller tuning involves:
-
i.
Evaluate plant characteristics: This is done to obtain a model for simulation, such as the number of inputs and outputs, nature of performance (linear or nonlinear), and appropriate sort of job it accomplishes.
-
ii.
Choose controller structure: It is feasible to select an optimal controller configuration that successfully balances plant operation based on the derived plant model.
-
iii.
Identify tunable controller variables: It has a collection of variables that directly compromise the controller process and plant reaction, regardless of the specified controller configuration. The designer must determine which of these variables are used for tuning and which are set to a fixed value.
-
iv.
Establish needed performance goals: Designers must describe conflicting performance settings or criteria for controller tuning based on application requirements. These criteria are concerned with the minimization or maximization of quantitative indicators connected to system responsiveness, which officially define a multi-objective optimization issue.
-
v.
Analyze various sets of controller variables: Due to the difficulties of obtaining analytical answers for engineering optimization problems like controller tuning, various solutions (candidate group of controller variables) must be recommended and tested in simulation to determine their degree of compliance with the application requirements.
-
vi.
Choose most appropriate set of controller variables: A collection of solutions with outstanding (non-dominated) performance trade-offs is discovered using the degree of compliance of each solution. Then, from among the options, one is chosen to be implemented in the final application.
Automatic PID tuning algorithms have received lots of attention because of their importance in the industry. This has been particularly true in the last two decades (Fraga-Gonzalez et al., 2017). Some methods applied include metaheuristic techniques such as GA, PSO and SA, among others. A comprehensive list of some popular metaheuristic algorithms are presented in Table 2, Table 3. In the following paragraphs, an overview of some of these algorithms and applications for PID tuning will be presented.
Table 2.
Comprehensive list of some popular metaheuristic algorithms (1975–2014).
| No. | Year of creation | Name of algorithm | Reference |
|---|---|---|---|
| 1. | 1975 | Genetic Algorithm (GA). | Holland (1975) |
| 2. | 1977 | Scatter Search (SS). | Cordón et al. (2006) |
| 3. | 1980 | Genetic Programming. | Abraham et al. (2006) |
| 4. | 1983 | Simulated Annealing (SA). | Kirkpatrick et al. (1983) |
| 5. | 1986 | Tabu Search (TS). | Glover (1997) |
| 6. | 1986 | Artificial Immune System (AIS). | Farmer et al. (1986) |
| 7. | 1989 | Moscato presented Memetic Algorithm. | Qasem and Shamsuddin (2011) |
| 8. | 1992 | Ant Colony Algorithm (ACO). | Dorigo et al. (1996) |
| 9. | 1993 | Multi-Objective GA (MOGA). | Fonseca and Fleming (1993) |
| 10. | 1994 | Reactive Search Optimization (RSO) | Battiti and Tecchiolli (1994) |
| 11. | 1995 | Particle Swarm Optimization (PSO). | Eberhart and Kennedy (1995) |
| 12. | 1997 | Differential Evolution (DE). | Storn and Price (1997) |
| 13. | 1997 | Cross Entropy Method (CEM). | Rubinstein (1997) |
| 14. | 1999 | Partial Optimization Metaheuristic Under Special Intensification Conditions (POPMUSIC) | Taillard and Voss (2002) |
| 15. | 2001 | Harmony Search (HS). | Geem et al. (2001) |
| 16. | 2001 | Bootstrap Algorithm (BA). | Hanseth and Aanestad (2003) |
| 17. | 2002 | Evolution strategies | Beyer and Schwefel (2002) |
| 18. | 2004 | Bees Optimization (BO). | Nakrani and Tovey (2004) |
| 19. | 2005 | Glowworm Swarm Optimization (GSO). | Krishnanand and Ghose (2005) |
| 20. | 2005 | Artificial Bee Colony Algorithm (ABC). | Karaboga (2005) |
| 21. | 2006 | Invasive Weed Optimization (IWO) | Mehrabian and Lucas (2006) |
| 22. | 2006 | Honey-bee Mating Optimization (HMO). | Haddad et al. (2006) |
| 23. | 2006 | Cat swarm optimization | Chu et al. (2006) |
| 24. | 2007 | Intelligent Water Drops (IWD). | Hosseini (2007) |
| 25. | 2007 | Imperialist Competitive Algorithm (ICA). | Atashpaz-Gargari and Lucas (2007) |
| 26. | 2008 | Water Drop Optimization (WDO) | Shah-Hosseini (2008) |
| 27. | 2007 | Monkey Search (MS). | Mucherino and Seref (2007) |
| 28. | 2009 | Firefly Algorithm (FA). | Yang (2009) |
| 29. | 2008 | Plant Growth Optimization | Wang and Cheng (2008) |
| 30. | 2008 | Biogeography - Based Optimization (BBO) | Simon (2008) |
| 31. | 2009 | League Championship Algorithm (LCA). | Kashan (2009) |
| 32. | 2009 | Gravitational Search Algorithm (GSA) | Rashedi et al. (2009) |
| 33. | 2009 | Cuckoo Search (CS). | Yang and Deb (2009) |
| 34. | 2010 | Bat Algorithm (BA). | Yang (2010) |
| 35. | 2010 | Fireworks algorithm | Tan and Zhu (2010) |
| 36. | 2010 | Chemical Reaction Algorithm | Ramaswamy and Sbalzarini (2010) |
| 37. | 2011 | Galaxy-based Search Algorithm (GbSA). | Shah-Hosseini (2011) |
| 38 | 2011 | Spiral Optimization (SO). | Tamura and Yasuda (2011) |
| 39. | 2011 | Teaching-Learning-Based Optimization (TLBO) Algorithm. | Rao et al. (2011) |
| 40. | 2012 | Krill Herd (KH) Algorithm. | Gandomi and Alavi (2012) |
| 41. | 2012 | Flower Pollination Algorithm (FPA) | Yang (2012b) |
| 42. | 2012 | Differential Search Algorithm (DSA). | Civicioglu (2012) |
| 43. | 2013 | Firefly Algorithm (FA) with chaos | Gandomi et al. (2013) |
| 44. | 2014 | Colliding Bodies Optimization (CBO) | Kaveh and Mahdavi (2014) |
| 45. | 2014 | Animal Migration Optimization | Li et al. (2014c) |
| 46. | 2014 | Centripetal Accelerated Particle Swarm Optimization (CAPSO) | Beheshti and Shamsuddin (2014) |
| 47. | 2014 | Grey Wolf optimization (GWO) | Mirjalili et al. (2014) |
| 48. | 2014 | Bumble Bees Mating Optimization | Marinakis and Marinaki (2014) |
| 49. | 2014 | Crisscross Optimization Algorithm (COA) | Meng et al. (2014) |
Table 3.
Comprehensive list of some popular metaheuristic algorithms (2015–2020).
| No. | Year of creation | Name of algorithm | Reference |
|---|---|---|---|
| 50. | 2015 | Water Wave Optimization | Zheng (2015) |
| 51. | 2015 | Ions Motion Algorithm | Javidy et al. (2015) |
| 52. | 2015 | Social Spider Algorithm (SSA) | James and Li (2015) |
| 53. | 2015 | Bull Optimization Algorithm | FINDIK (2015) |
| 54. | 2015 | Elephant Herding Optimization | Wang et al. (2015) |
| 55. | 2016 | Jaya Algorithm | Rao (2016) |
| 56. | 2016 | Raven Roosting Optimization Algorithm | Brabazon et al. (2016) |
| 57. | 2016 | FIFA World Cup Competitions Algorithm | Razmjooy et al. (2016) |
| 58. | 2016 | Spider Monkey Optimization (SMO) | Al-Azza et al. (2016) |
| 59. | 2017 | Smart Structured Algorithm (SSA) | Salmani and Eshghi (2017) |
| 60. | 2017 | Opposition-Based Water Wave Optimization | Wu et al. (2017) |
| 61. | 2017 | Primal-Dual Asynchronous Particle Swarm Optimization (pdAPSO) | Dada et al. (2017) |
| 62. | 2018 | Primal-Dual Particle Swarm Optimization (pdPSO) | Dada and Ramlan (2018) |
| 63. | 2018 | Farm Fertility. | Shayanfar and Gharehchopogh (2018) |
| 64. | 2018 | Coyote Optimization Algorithm (COA). | Pierezan and Coelho (2018) |
| 65. | 2019 | Wolf Pack Search and Local Search (WPS-LS). | Dong et al. (2019) |
| 66. | 2019 | Chaotic Dolphin Swarm Algorithm (CDSA) | Qiao and Yang (2019) |
| 67. | 2019 | Emperor Penguins Colony (EPC). | Harifi et al. (2019) |
| 68. | 2019 | Pathfinder Algorithm (PFA) | Yapici and Cetinkaya (2019) |
| 69. | 2019 | Squirrel Search Algorithm (SSA) | Jain et al. (2019) |
| 70. | 2019 | Algorithm of the Innovative Gunner (AIG). | Pijarski and Kacejko (2019) |
| 71. | 2020 | Butterfly Optimization Algorithm (BOA). | Arora and Singh (2019) |
| 72. | 2020 | Levy Flight Distribution (LFD). | Houssein et al. (2020) |
| 73. | 2020 | Shuffled Shepherd Optimization Algorithm (SSOA). | Kaveh and Zaerreza (2020) |
4.3. Genetic algorithms
Genetic Algorithms are search and optimization approaches motivated by two biological philosophies termed as procedure of natural selection and mechanism of natural genetics (Krishnakumar and Goldberg, 1992). GA (Sreekanth and Hari, 2016; Man et al., 1996) is a stochastic global search approach that mimics the natural evolution process or procedure. GA is a class of probabilistic optimization techniques that uses natural selection and genetic inheritance to solve problems. GA avoids local minima and converging to suboptimal solutions by starting at multiple distinct points and searching in parallel (Wang et al., 2003; Skogestad, 2001). As a result, GA has been shown to be effective in locating high performance space in complicated domains while avoiding the issues associated with high dimensionality that other approaches, such as gradient decent techniques that rely on derivative information, may encounter (Goldenberg, 1989).
The stages of GA implementation are summarized in a flowchart as shown in Fig. 5. Details of GA implementation for PID tuning can be seen in Meena and Devanshu (2017).
Figure 5.
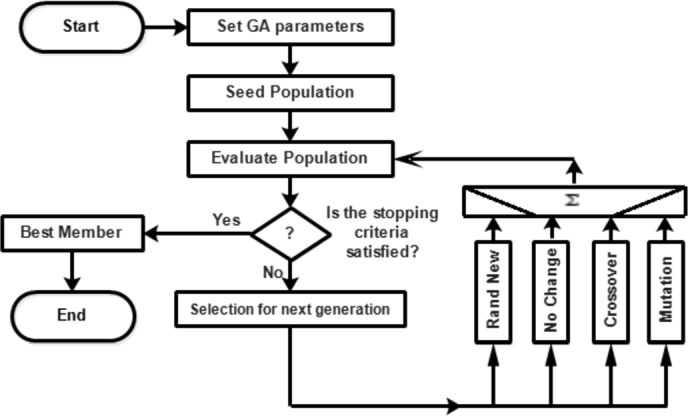
Genetic algorithm process flowchart.
4.3.1. Genetic algorithm for PID tuning
Currently, GA has been getting a good deal of attention and further studies have been done to research its implementation. Implementation in Control Engineering has advanced greatly. Despite the fact that performance, system stability, static and dynamic index, and system robustness must all be considered while designing a control system, PID parameters have been fine-tuned using GAs for various processes or plants. El-Deen et al. (2015) and Joseph and Emmanuel (2018) discussed the best way to tune PID settings for DC motor speed control. The GA controlled PID controller is designed for synchronous generators to promote damping and maintain power system stability, as presented in Mohammed et al. (2014). GA based design of PID controller for cascade control process is presented in Patil and Lakhekar (2017). An investigation on applicability of genetic algorithms for automatic tuning of PID controller parameters is presented in Amaral et al. (2018).
4.4. Ant colony optimization
The ant colony optimization (ACO) algorithm is a distinct method inspired by insect swarm behavior and was designed for combinatorial issues at first. ACO is a stochastic based metaheuristic method for solving combinatorial optimization issues that employs artificial ants. ACO's goal is to find shorter routes from their nests to food sources. Ants leave behind a chemical compound called a pheromone that allows them to communicate with other ants. When an ant moves, it leaves a consistent amount of pheromone behind that other ants can detect. Every ant travels in its own unique way, but when it comes across a pheromone trail, it must decide whether or not to follow it. If one ant follows the trail, its own pheromone strengthens it, and an increase in pheromone enhances the likelihood that the next ant will follow it. As a result, the more ants that go along a path, the more appealing it becomes to succeeding ants. In addition, an ant who takes a shorter route to a food source will return to the nest sooner.
Dorigo suggested the fundamental ant structure, an earlier version of ACO, in his PhD thesis in 1992. (Dorigo, 1992). Dorigo devised a difficult optimization algorithm based on both simple and complex foraging ant features, which sparked widespread interest in the 1990s and beyond. Dorigo and others introduced a number of alterations and hybrids. Offline pheromone updates and pheromone evaporation were demonstrated in particular, which led to more widespread of ACO in 1999 (Cooper and Smeresky, 2020; Dorigo et al., 2006). In Adubi and Misra (2014), an overview of the many types of ACO algorithms, their applications, and a comparative study of a few selected versions are presented. The navigation of ant is represented by the following probability Equation (12) in Sundareswaran and Nayak (2012):
| (12) |
A high level algorithmic concept of ACO is presented in Fig. 6.
Figure 6.

Ant colony optimization search algorithm flowchart.
4.4.1. ACO for PID tuning
The parameters of a PID controller for DC motor of a robotic arm was tuned using ACO in Sandoval et al. (2015). The findings were compared to typical tuning techniques, and ACO-PID performed better than ZN tuned PID. As demonstrated in Priyambodo et al. (2015), a PID controller is utilized for quadrotor stabilization utilizing the ACO method. An application of optimization method based on artificial ants colonies (ACO) for the synthesis of an optimal PID regulator for human heart control is presented in Aabid et al. (2017). Load Frequency Control (LFC) of a single area re-heat thermal power system is one of the other PID tuning applications that uses ACO (Kaliannan et al., 2016), Autonomous Underwater Vehicle (AUV) control system (Herlambang et al., 2019), Single Machine Infinite Bus control (Yunus and Djalal, 2019), position control operation of a DC motor (Şimşek et al., 2019) and multi objective ACO for PID can be found in Chiha et al. (2012).
4.5. Artificial bee colony optimization
Karaboga proposed the Artificial Bee Colony (ABC) metaheuristic optimization technique in 2005. Honey bees' clever foraging habit served as inspiration. The method is based on the model for honey bee colony foraging behavior presented by Karaboga (2005). Working and unemployed foraging bees, as well as food sources, are the three main components of the concept. The employed and unemployed foraging bees in the first two components look for ample food sources close to their hive, which is the third component. Forager recruitment to rich food sources, which results in positive feedback, and forager desertion of low food sources, which results in negative feedback, are two fundamental behaviors required for self-organization and collective intelligence, according to the concept. A comprehensive discussion and application strategy of ABC can be seen in Karaboga (2010).
The ABC optimization algorithm, like the ant colony optimization algorithm, was created to solve a combinatorial problem in which several solutions can be discretized into an array of building blocks that can be rearranged and mutated to find the best answer. The ABC approach was also utilized to optimize the trajectory (Murrieta-Mendoza et al., 2018), parameter optimization (Zhong et al., 2014; Ding et al., 2015), and remote sensing applications (Jayanth et al., 2015; Fu et al., 2020). Applications, overview and relevant equations can be seen in Xu et al. (2013); Kumar et al. (2017); Abu-Mouti and El-Hawary (2012). An illustration of ABC application flowchart is presented in Fig. 7.
Figure 7.

Phases of artificial bee colony algorithm flowchart.
4.5.1. ABC for PID tuning
The ABC method outperformed earlier population-based algorithms in numerical tests, with the extra bonus of fewer control settings (Liao et al., 2014). Apart from the usual population-based control parameters like population size or colony size (SN) and maximum generation number or maximum cycle number, the ABC algorithm's basic version only has one control parameter called limit (MCN). Because of its simplicity and ease of implementation, the ABC technique has sparked a lot of attention, and it has been utilized to solve a variety of real optimization problems. One of these practical challenges is the setting of PID controller parameters.
ABC is used to tune PID settings to perfection. Some benchmark functions are used to test the algorithm. For the computation of PID parameters, the test functions were used. On the basis of overshoot, settling time, and minimal error, the performance is compared to that of other approaches (Abachizadeh et al., 2010). ABC algorithm was proposed in El-Telbany (2013) for tuning the regulation parameters of PID controller for DC motor. The optimum parameters of PID controller were obtained using ABC algorithm for higher order oscillatory systems in Bagis and Senberber (2017). Other plants controlled using PID controllers and tuned by ABC algorithm include: fractional order systems (Senberber and Bagis, 2017), hub motion and end point vibration suppression of double-link flexible robotic manipulator (Annisa et al., 2018), bench scaled nonlinear dynamical system (NLDS) (Valluru and Singh, 2017) and single phase inverter (Zhi, 2019).
4.6. Teaching learning based optimization
This technique was suggested by Rao et al. (2012) and Rao and Kalyankar (2013) to find the worldwide solution to mechanical design difficulties using large-scale non-linear optimization problems TLBO (Teaching-Learning-Based Optimization) is a population-based metaheuristic search algorithm that mimics a typical class's teaching and learning methods Rao et al. (2012). A group of students is called a solution in TLBO, and the fitness of solutions is called results or grades. The TLBO algorithm adjusts each learner's or student's grade in class by learning from the teacher and learning from student engagement.
The algorithm procedure is divided into two stages or actions: the instructor stage and the learner stage. In the teacher stage, the instructor is seen as the best solution in the entire group, and the teacher shares his or her knowledge with the students in order to improve the class's mean outcome. The equations and details of implementation can be seen in Rao et al. (2012). The application flowchart for TLBO is presented in Fig. 8.
Figure 8.

Descriptive flow chart for Teaching–Learning-Based Optimization (TLBO).
4.6.1. TLBO for PID tuning
TLBO has gained a lot of attention, and has been adjusted to capture limited data due to its appealing properties such as simple concept, lack of exact algorithm variables, simple implementation, and fast convergence (Yu et al., 2016b), multiobjective (Patel and Savsani, 2016; Rao and Patel, 2014), large-scale (Biswas et al., 2012), and dynamic optimization problems (Chen et al., 2018a). TLBO has also been effectively applied to a variety of scientific and engineering sectors (Chen et al., 2018b).
While in the case of PID parameter tuning, TLBO has been employed to adjust the variables of PID for different processes. Some of these include: automatic voltage regulator (AVR) processes, Automatic Generation Control (AGC) in power systems (Sahu et al., 2016), automatic voltage regulator (AVR) (Chatterjee and Mukherjee, 2016; Priyambada et al., 2014), improve performance of the magnetic levitation system (Yadav et al., 2018).
With the help of TLBO, a fuzzy PID controller is proposed for automatic generation control (AGC) of a thermal system (Sahu et al., 2015). There are two degrees of freedom: one and two. Using a teaching learning based approach, a PID controller design is used on an AVR device (Rajinikanth and Satapathy, 2015). The fuzzy-PID controller was proposed by Sahu et al. (2015) for the AGC of a two unequal area interconnected thermal system. For the first time in this sector, the TLBO technique is employed to obtain parameters for the proposed fuzzy-PID controller. The design challenge is formulated as an optimization problem, and the fuzzy-PID controller's parameters are optimized via TLBO. When the proposed method's results are compared to those of several recently published approaches, such as the Lozi Map-based Chaotic Optimization Algorithm (LCOA), GA, Pattern Search (PS), and Simulated Algorithm (SA) based PID controller, the proposed method clearly wins for the same system and objective function. The TLBO optimized fuzzy-PID controller has superior dynamic performance in terms of settling time, frequency overshoot and undershoot, and tie-line power deviation when compared to LCOA, GA, PS, and SA based PID controllers.
4.7. Bat algorithm (BA)
The Bat Algorithm (BA) is a metaheuristic algorithm derived from natural bats' sound waves activity to find prey and differentiate between various kinds of insects even in dark environment (Yang, 2010). BA was recently introduced by Yang (2010), which was influenced by the sonar of microbats. Each bat in the original population updates its position in a correlated fashion using echolocation. Bat echolocation uses a sequence of powerful ultra-sound pulses to generate echoes, which are then received with latencies and different sound frequencies, qualifying bats to identify the exact prey. In natural world, echolocation can last only a few thousandths of a second (up to around 8–10 ms) and also have a varying amplitude in the range of 25–150 kHz, which corresponds to air wavelengths of 2–14 mm (Gandomi and Yang, 2014).
Microbats typically use sound waves to locate prey. Microbats transmit small signals when traveling; nonetheless, when a possible prey is nearby, their transmitted pulse rates increase and the frequency is tuned up. The addition of frequency, also known as frequency tuning, in combination with the speed of pulse emission will reduce the wavelength of echolocations and hence improve detection precision (Gandomi and Yang, 2014). An application illustration flowchart for BA is presented in Fig. 9.
Figure 9.
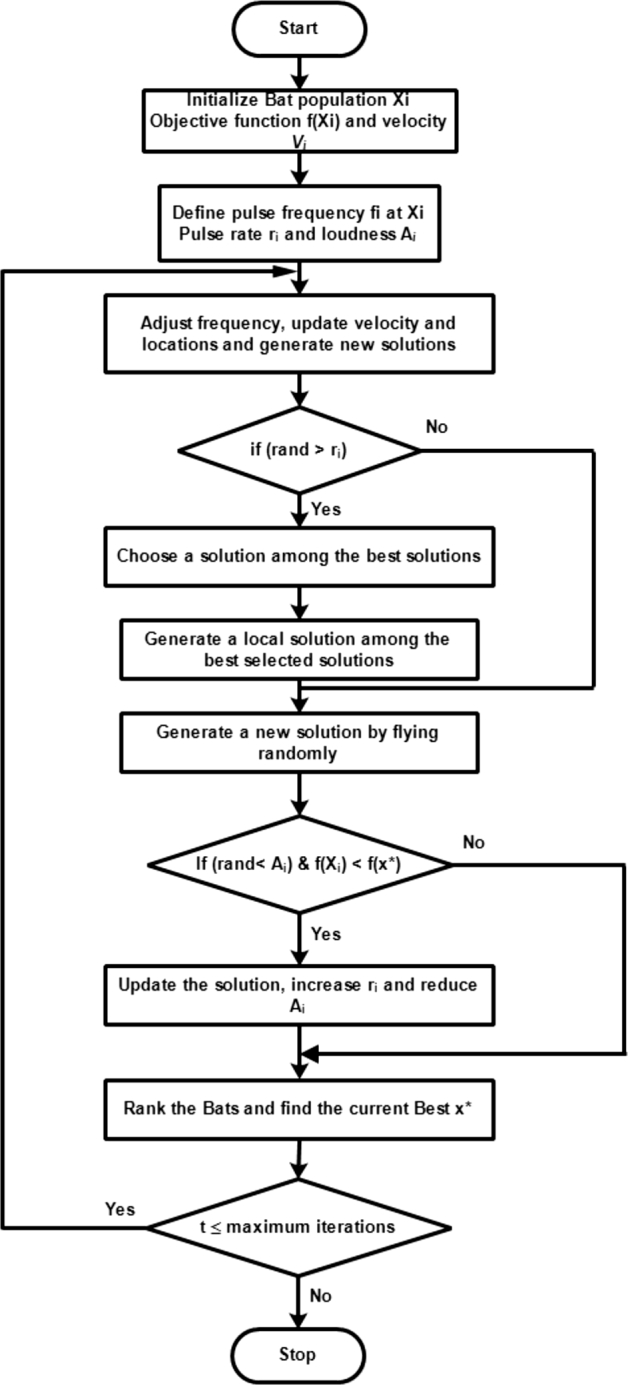
Generic flowchart for Bat algorithm.
Further details, readings or consultation on BAs can be seen in Yang (2012a); Chaib et al. (2017); Gandomi and Yang (2014); Yang and Gandomi (2012); Singh et al. (2015); Al-Betar et al. (2018).
4.7.1. BAT for PID tuning
BA was used to solve realistic real-world problems because it is a suitable metaheuristic algorithm with unique ability to handle hard optimization problems. A few of these classifications are presented in Jayabarathi et al. (2018): structural Optimization, classification and feature selection, electrical power systems, aerospace engineering, petroleum engineering, and nuclear engineering. Furthermore, BA has been implemented in control engineering where PID tuning is an aspect.
The BA for optimizing PID parameters has been used in a variety of process plants with encouraging results. In Katal et al. (2014), BA was utilized to fine-tune the PID controller parameters for a connected tank liquid level control system, which is widely used in the mineral oil, food manufacturing, and water purification companies. BA in Kotteeswaran and Sivakumar (2013) was used to fine-tune the settings of a centrally controlled PI controller for a coal gas turbine, which is a non-linear multidimensional process with complex relationships across control loops. Singh et al. (2015) used BA for tuning the parameters of PID controller of a servo motor. Other implementations of BA for PID tuning include, speed control of brushless direct current drive (Premkumar and Manikandan, 2016), bio-inspired robot manipulator (Rahmani et al., 2016) and control of microelectromechanical systems (MEMS) gyroscopes (Rahmani et al., 2018).
4.8. Bacterial foraging optimization (BFO)
Passino (2002) presented the Bacteria Foraging Optimization (BFO) algorithm, which is a member of the family of nature-inspired optimization algorithms. BFO imitates a swarm of Escherichia coli bacteria's searching strategy. Bacteria look for nourishment in a way that maximizes the amount of energy they get per unit of time. By sending signals, each bacterium communicates with each other. After comparing various prior factors, a bacterium makes foraging decisions. Chemotaxis is the mechanism by which a bacterium moves by taking little steps while looking for nutrition, and a key principle of BFO is to simulate chemotactic motion of artificial bacteria in the problem search space.
Specifics on these processes, as well as the BFO implementation steps, can be found in Das et al. (2009); Datta and Nandakumar (2017); Jhankal and Adhyaru (2011). A flowchart showing the flow of BFO algorithm is depicted in Fig. 10. The BFO variables to be defined for applications include: number of bacteria S, swimming length Nn, number of chemotaxis steps Nc, number of reproduction steps Nr, number of elimination and dispersal events Ne, and the probability of elimination/dispersal Ped. Step size of swimming C for bacteria is a vector corresponding to vector θ. Initial values of which are boundaries of parameters randomly created. The functions and are defined to evaluate cost and fitness of bacterium respectively. Details of application flow diagram can be seen in Huynh et al. (2020).
Figure 10.

Generic flow diagram for BFO algorithm.
For further readings, variants and applications of BFO can be seen in Agrawal et al. (2012); Niu et al. (2010); Tang and Wu (2009); Rani and Kumar (2015).
BFO has piqued the interest of scholars from several disciplines of study since its debut, owing to its biological purpose and beautiful shape. Researchers are attempting to combine BFO with a variety of other algorithms in order to investigate both its local and global search features. It has previously been used to solve a variety of real-world problems, and has been found to be effective over a wide range of GA and PSO types (Jhankal and Adhyaru, 2011).
4.8.1. BFO for PID tuning
The BFO algorithm is a new swarm intelligence system inspired by the foraging behavior of Escherichia coli (E.coli) in human intestines. After significant research over the previous few years, BFO has demonstrated good performance in a range of application domains (Niu et al., 2010). Lately, BFO has gotten a lot of interest, and it offers a lot of promising industrial applications and information processing. Few models that simulate bacterial foraging behavior have been devised and used to solve actual challenges (Bayoumi and Salem, 2012). The BFO method, like other SI algorithms, has been used to solve problems in a wide range of fields. Communication systems, communications engineering, intelligent control engineering systems (Niu et al., 2010) are some of the application sectors in which PID is used.
BFO has been employed for suitable tuning of PID controller settings to overcome difficulties that numerous industrial machinery are regularly troubled with, such as high order and uncertainties. The BF-PID controller was optimized and tuned using BFO in Niu et al. (2006). BF-PID has a faster settling time, little or no overshoot, and greater resilience than GA-PID. Compared with GA-PID, BF-PID have a quicker settling time, little or without overshoot and higher robustness. Similarly, dos Santos Coelho and da Costa Silveira (2006) provided an improved BFO for PID optimization in a robotic manipulator system. To adjust the C constant in basic BFO, the new technique was tested with a chemotactic step parameter (C) variable speed based on Uniform, Gaussian, and Cauchy probability distributions. The BFO approach was used in Ali and Majhi (2006) to improve PID parameters by reducing the integral of time error squared (ISTE) condition. Also, addressing the challenge of PID controller tuning, Korani et al. (2009) coupled bacteria foraging actions with PSO. Rajinikanth and Latha have suggested utilizing BFO to tune PID controller parameters for unstable process models in Rajinikanth and Latha (2012). The results demonstrate that utilizing the bacterium foraging algorithm to tune PID parameters is a viable option.
Monitoring a moving target along an unpredictable route by a mobile robot is another application of BFO for tuning PID controllers (Benbouabdallah and Zhu, 2013; Huynh et al., 2020), speed controller of a permanent magnet synchronous motor (Agarwal et al., 2017), position control of Direct Current (DC) servo motor (Jasim, 2018) and tuning PID parameters for Multi-variable Input and Multi-variable Output (MIMO) systems (Sivakumar et al., 2016).
4.9. Particle swarm optimization (PSO)
Kennedy and Eberhart (1995) proposed the PSO algorithm, which is a metaheuristic algorithm based on the principle of swarm intelligence and capable of solving complicated mathematics problems encountered in engineering (de Almeida and Leite, 2019). The social activities of birds, fish shoals, and even humans inspired the PSO algorithm (Ribeiro et al., 2017). In PSO, it is assumed that each individual has their own experience and can assess its quality. Because the algorithm is based on social behavior, each individual is aware of what their neighbors are going through.
The PSO algorithm is based on these two perspectives (Ribeiro et al., 2017). The individual's actions are influenced by its past performance and its surroundings. A culture's adjustment process can be divided into three categories: assess, compare, and mimic. Every individual have the ability to assess their surroundings and predict their behavior, as well as compare their outcomes to those of their peers. It can detect flaws and advantages in each action and duplicate the important events produced by their neighbors. It indicates that mental talents are acquired and maintained (Ribeiro et al., 2017).
Detail information about the evaluation of the implementation can be found in de Almeida and Leite (2019); Kennedy and Eberhart (1995). The flow diagram for basic PSO algorithm is shown in Fig. 11.
Figure 11.

Flow diagram for basic PSO algorithm.
4.9.1. PSO for PID tuning
PSO has recently received increased interest from researchers because of its suitability for realization and promising optimization capability in a variety of applications (Song and Gu, 2004). PSO's application to various domains of effort is based on two factors. The first is to increase PSO performance by changing parameters, boosting population diversity, and combining it with other optimization methods. The second is PSO's use in various domains such as multi-objective optimization, electronics, neural network training, network security and mute selection, medicine, and emergent system identification, to name a few.
Because of its intelligible performance and ease of use, PSO has been extensively used to a variety of domains of endeavor (Hajihassani et al., 2018). PSO is a popular optimization technique, and because of its versatility, it has a wide range of applications in fields such as medicine (Eshtay et al., 2018), financial (Shie et al., 2012), economics (Lee and Park, 2006), security and military (Cho et al., 2010; Cheng et al., 2008), biological, system identification etc. (Khare and Rangnekar, 2013).
PSO was used by many academics to tackle difficulties in the disciplines of structural, hydrological, and geotechnical civil engineering (Hajihassani et al., 2018). PSO has recently been used to solve problems in operations research (Yu et al., 2016a; Xia and Li, 2017). Some applications are also closely linked to mechanical engineering (Chen et al., 2013), and PSO algorithms have been used to solve problems in operations research (Che et al., 2012). Academic researchers have also used PSO to address optimization problems in the field of electronics and communication engineering (Ganguly et al., 2013). Liu et al. (2013), Liu et al. created a job scheduling model for cloud computing based on the PSO algorithm to reduce energy usage and enhance profit. Zhang et al. (2015) contains a detailed overview of the implementation of PSO techniques. Swarm robotics flocking motion is another domain where PSO has been successfully utilized (Dada and Ramlan, 2015; Dada and Ramlana, 2013).
PSO has been used in various applications of automatic control systems that heavily rely on PID controllers. In Štimac et al. (2014), PSO was used to tune the settings of a PID controller employing an active magnetic bearing that suspends a rotating shaft and keeps it suspended using regulated electromagnetic forces on the rotor in radial and axial directions. Chang and Chen (2014) designed a PID control system for MIMO activities. In MIMO control systems, an improved version of the PSO algorithm was utilized to tune PID control gains. Particle swam optimization approach was used in Rajesh and Ananda (2015) to optimize settings of PID controllers in order to modify the location of the camera in an Unmanned Aerial Vehicle (UAV). The findings were compared to those of a traditional PID controller. PSO approach was used to calibrate PID controllers for various transitory circumstances of Permanent Magnet DC motor in Medewar and Munje (2015). The proposed approach increased both noise immunity and steady state detection accuracy, according to the results of experiments. PSO has also been used to tune PID control variables for the control of an inverted pendulum in the past (Joseph and Dada, 2018), and speed control of a DC motor in Bassi et al. (2011).
4.10. Cuckoo optimization algorithm
Yang and Deb (2009) developed the Cuckoo Search (CS) metaheuristic evolutionary optimization algorithm in 2009. The cuckoo is a bird species that inspired the concept of CS. Cuckoos are appealing birds, not only because of their wonderful songs, but rather because of their proactive breeding approach. Cuckoos lay their eggs in the nests of other host birds or species when they are grown. Compel brood parasitism is the term for this type of parasitism. The ability of a single cuckoo to lay an egg that may duplicate, or resemble, host nest eggs in such a way that the host nest mother bird cannot distinguish the cuckoo egg from her own is crucial. The cuckoo's egg will hatch before the host egg, confirming the cuckoo's control in the nest and so extending their lifespan.
The concept of Cuckoo Optimization Algorithm (COA) is depicted in Fig. 12. The pseudocode, equations and application details for CS can be seen in Yang and Deb (2009); Bhandari et al. (2014); Shair et al. (2015); Mamizadeh et al. (2018); Rajabioun (2011).
Figure 12.

Application flow diagram for Cuckoo search algorithm.
4.10.1. Cuckoo search algorithm for PID tuning
Recently, CS has been applied in almost every area and domain of function optimization (Fister et al., 2014), engineering optimization (Yang and Deb, 2010), image processing (Brajevic and Tuba, 2014), scheduling (Burnwal and Deb, 2013), planning (Akbarzadeh and Shadkam, 2015), feature selection (Abd El Aziz and Hassanien, 2018), forecasting (Wu et al., 2019), and real-world applications (Expósito-Izquierdo and Expósito-Márquez, 2017). Engineering optimization appears to be just one of the many uses. CS and its derivatives have been used in nearly every field of research, technology, and manufacturing.
CS techniques have been used to tune PID controller parameters in many studies. Kumar et al. (2014) presents PID parameter tuning for inverted pendulum monitoring, experimental validation of Van der Pol oscillator, and stability study of capsizing problem as an example of nonlinear systems employing cuckoo optimization approach. Bingul and Karahan (2018) presents a new tuning approach for PID parameters in the AVR system utilizing the CS algorithm and a new frequency-domain performance benchmark. In their paper, a new way for designing PID controllers utilizing the CS optimization algorithm was provided in order to improve the performance of buck-boost converters in LED driver circuits (Verma et al., 2016; Nimisha and Senthilkumar, 2018). The CS optimization approach was recently used to optimize the PID parameters for various different industrial plants. Maximum Power Point Tracking (MPPT) of PV systems (Mosaad et al., 2019b), Speed of induction motor regulation (Peram et al., 2018), and optimization of complicated stability radius via single objective constrained optimization are instances of such plants (Solihin and Akmeliawati, 2018).
4.11. Simulated annealing
In 1953, Metropolis et al. (1953) was the first to propose a Simulated Annealing (SA) approach. It resembles the rearranging of particles in a body to a crystalline state, which is accompanied by a drop in temperature. The constituents of a body wander laterally within a region whose amplitude is defined by its temperature. As long as cooling is gradual enough, atoms or particles can position themselves in lower and lower energy levels, finally reaching the lowest energy state (crystalline state) (Baselga, 2011). SA is based on the Monte-Carlo iterative approach (Jia and Lichti, 2017).
The flowchart for SA is presented in Fig. 13. Further readings and descriptive algorithms on SA can be found in Fouskakis and Draper (2002); Suman and Kumar (2006); Eglese (1990).
Figure 13.

Flowchart for Simulated annealing algorithm.
4.11.1. Simulated annealing for PID tuning
SA is a method for proffering solution to difficult optimization problems with satisfactory outcomes. Over the years, South Africa has attracted a lot of attention and interest. Kirkpatrick et al. (1983) and Černỳ (1985) sparked the current interest. These papers showed how to use a model for simulating solid annealing provided by Metropolis et al. (1953) to tackle optimization issues where the objective function to be minimized relates to the energy of the solid's states.
SA has been used to solve problems in a variety of fields, including computer VLSI design (Wong et al., 2012), image processing (Tavares et al., 2019), molecular physics (Wu et al., 2016), chemistry (Hernandez et al., 2019), process optimization (Sibalija, 2018), and job shop scheduling (Cruz-Chávez et al., 2017). There has also been development on theoretical results from a mathematical examination of the method, as well as several computing studies evaluate the effectiveness of SA with the effectiveness of other techniques for a variety of situations.
Since the SA algorithm selects control parameters in its own evolutionary process and does not need any rule of thumb, it has diffused rapidly into many application areas. Recently, some researchers have used SA algorithm in tuning of PID control parameters. An intelligent concept for PID controller parameters tuning is suggested using SA for multi-objective problem and its results was compared with basic PID which shows SA to be better than conventional or basic PID controller in terms of tuning PID parameters (Bansal et al., 2014). Suman et al. (2010) introduces a novel multi-objective optimization approach based on SA dubbed Orthogonal Simulated Annealing (OSA).
Yachen and Yueming (2008) used SA algorithm for tuning different PID controllers in practical applications. SA was used to tune PID parameters for motion control system having constant disturbance. The experimented results were compared, showing that different controller was superior in different control requirement. Each controller has its own advantage and proper scope.
SA was recently employed to fine-tune the characteristics of a permanent magnet brushless dc motor (PMBLDCMPID)'s controller (Shatnawi and Bayoumi, 2019). The response parameters index, maximum overshoot, rise time, and settling time for each controller are tuned to reduce the controller's parameters. The SA optimization approach is used to tune the system. The technique determines the best PID/PI controller parameter for fixed-structure PID/PI controllers.
SA has been applied for tuning PID parameters of different processes like AVR system (Lahcene et al., 2017), attitude control system for a re-entry capsule (Vijay and Banu, 2016) and DC-DC power converters (Alqudah et al., 2014). Further readings on application of SA can be seen in Siddique and Adeli (2016); Suman and Kumar (2006); Sibalija (2018); Varty (2017).
4.12. Grey wolf optimizer
Grey Wolf Optimization (GWO) is a recently proposed metaheuristic optimization algorithm (Mirjalili et al., 2014). Grey wolves' social structure and intelligent hunting tactics motivate GWO. Grey wolves are generally at the top of the hierarchy in their habitats. Grey wolves usually dwell in groups of 5–12 people. Grey wolves, in particular, have a well-defined social hierarchy. The grey wolf social hierarchy and duties are depicted in Fig. 14. The main distinction between GWO and other metaheuristic optimization algorithms is the social dominant hierarchy, whose primary goal is to develop the candidate solution during each iteration. As a result, GWO imitates grey wolf hunting behavior as regards locating and attacking prey (Goldbogen et al., 2013).
Figure 14.

Social hierarchy of grey wolves and their responsibilities.
Muro et al. (2011) stated the major stages of grey wolves hunting actions as follows:
-
i.
Trailing, pursuing, and advancing the prey.
-
ii.
Following, encircling, and harassing the prey until it stops moving.
-
iii.
Attacking in the direction of prey.
4.12.1. GWO for PID tuning
The remarkable advantages of GWO has led to tremendous research applications from several critical research domains. These application domains can be categorized into: machine learning (Emary et al., 2016, Emary et al., 2015; Al-Tashi et al., 2019), engineering (Kohli and Arora, 2018; Yıldız and Yıldız, 2018), wireless sensor network (Kaushik et al., 2019; Rajakumar et al., 2017), environmental modeling (Tikhamarine et al., 2020; Sweidan et al., 2016), medical and bio informatics (Sharma et al., 2019, Sharma et al., 2020) and image processing (Khairuzzaman and Chaudhury, 2017; Li et al., 2017a).
In control engineering, there has been an explosion in amount of publications that explore application of GWO algorithm for tuning PID controller parameters. The work in Li et al. (2017b) proposed GWO scheme to tune variables of a PI controller for a closed-loop condenser pressure control mechanism. Results of performance demonstrated the efficacy of Grey Wolf (GW) optimizer compared to GA and PSO. Also in Yadav et al. (2016), parameters of a basic PID controller was tuned using GWO algorithm for a magnetic levitation system. Likened to basic ZN tuning scheme, GW optimizer demonstrated superior results. The study in Das et al. (2015) investigated the application GW optimizer to tune the control variables of a PID controller for the regulation of speed of a second order DC motor system. Improved values of transient reaction stipulations were attained in comparison to PSO, ABC and ZN approaches. Regulation of control variables of PID controller for DC motor was similarly explored in Madadi and Motlagh (2014). Results of performance evaluation demonstrated superiority of GWO over PSO, by improving the dynamic performance of the system.
Some other applications of GWO for PID tuning include robotics (Şen and Kalyoncu, 2018), speed control of DC motor (Agarwal et al., 2018), inverted pendulum (Yadav et al., 2020), voltage regulation (Verma and Nagar, 2018) and wind turbine (Sule et al., 2020). A generic flowchart illustrating GWO algorithm is presented in Fig. 15.
Figure 15.
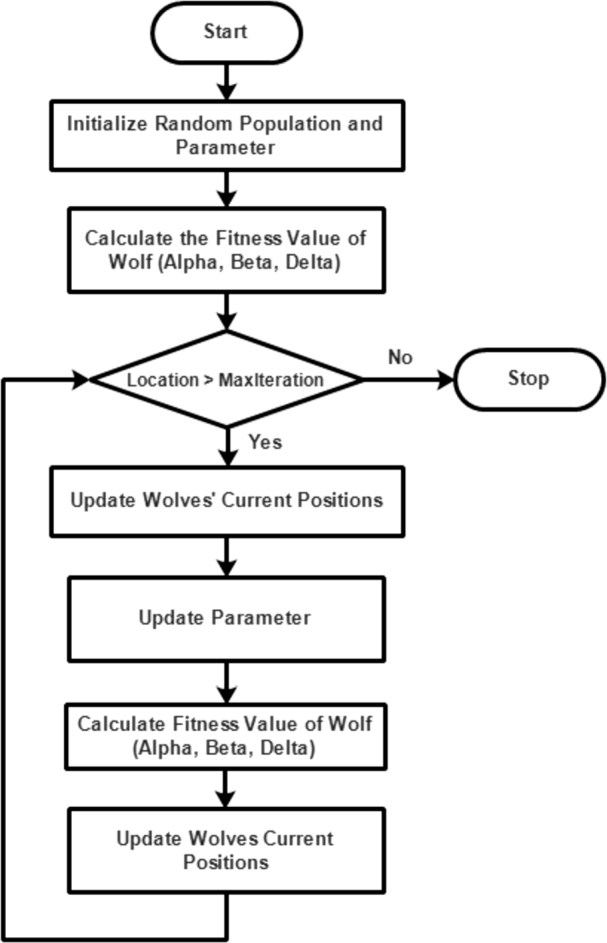
Grey wolf optimization application flowchart.
4.13. Krill herd algorithm
The herding behavior of krill individuals inspired the Krill Herd (KH) algorithm. It is a new swarm intelligent algorithm that has outperformed conventional swarm intelligent algorithms. Gandomi and Alavi (2012) proposes a novel biologically motivated approach for tackling optimization issues called KH. The KH algorithm is based on the herding of krill swarms in response to biological and environmental events. Almost all of the necessary coefficients for using the KH method are determined from real-world experiments. Each krill's fitness function is defined by its remoteness from food and maximal concentration of swarm.
KH's entire optimization technique may be broken down into three simple steps. These three acts are taken into account while updating each krill. The distance between the food position and the krill's location defines the objective function. Because of its remarkable application performance, KH has gotten a lot of attention from academics, experts, and scientists. Further details on KH algorithm can be seen in Gandomi and Alavi (2012). Fig. 16 presents basic KH application flow diagram. Other variants of KH algorithm can be seen in Li et al. (2014a); Yaghoobi and Mojallali (2016); Wang et al. (2019).
Figure 16.

Basic Krill Head application flow diagram.
4.13.1. KH algorithm for PID tuning
KH algorithm has been employed to solve several engineering problems. These engineering applications of KH algorithm as grouped by Wang et al. (2019) include; continuous optimization, combinatorial optimization, constrained optimization, multi-objective optimization, dynamic and noisy environment applications. Supplementary specific application areas of KH include: electric and power systems (Bulbul et al., 2018), wireless and network systems (Kalaiselvi and Radhakrishnan, 2015; Karthick and Palanisamy, 2019), neural network training (Kowalski and Łukasik, 2016), robotics (Rao et al., 2018), clustering (Abualigah et al., 2017) and medicine (Kumari and Arumugam, 2015). Also, KH has been used for design of industrial controllers. An example of such can be seen in Younesi and Tohidi (2015).
The KH algorithm has been shown to be stable and robust in the tuning of PID settings. The KH method was used to propose optimal tuning of PID controller parameters for frequency stability in an isolated wind-diesel power system (Shayanfar et al., 2015). The simulation was run in four different scenarios: a step change in diesel side load, a step change in wind speed, a random change in diesel side load, and a random change in wind speed. The Bee Colony algorithm was used to compare the outcomes of the KH technique. When compared to BC-based PID controllers (BC-PID), the results showed that KH-based PID controllers (KH-PID) perform better. Optimal tuning of PID parameters for First Order Plus Dead Time system (FOPDT) and fourth order system in Alikhani et al. (2013). The results suggest that the KH algorithm is beneficial for controller tuning. The PID-KH algorithm was used to propose and illustrate optimal control of a state microgrid system (Regad et al., 2020). An objective function is used to optimize the gains of PID controllers. The simulation results were shown, and using the KH algorithm improves the system's performance in comparison to the GA and PSO focusing on PID. The efficiency of the system has improved. Other PID-controlled factories that use KH are: Power System Stabilizer (Mukherjee et al., 2019), Power System Restoration (PSR) Indices (Chandrasekar et al., 2017), load frequency load control (Alam et al., 2016).
Furthermore, several other variants of KH algorithm have also been implemented for PID controller tuning. Some of such proposals can be seen in Yaghoobi and Mojallali (2016).
4.14. Whale optimization algorithm
Mirjalili and Lewis (2016) proposed the Whale Optimization Algorithm (WOA) in 2016. It is a stochastic metaheuristic algorithm. WOA was inspired by the hunting activity or tactic of humpback whales. WOA's methodology treats each and every solution as a whale. In this method, a whale tries to fill a new place in a search region that is thought to be the group's best component. Whales use two search tactics to locate prey and attack. Prey encirclement and the development of bubble nets are two of these search techniques. In terms of optimization, as whales look for prey, they explore the search space, and exploitation happens during attack activity. Whales, like humans, have spindle cells that control emotions, judgment, and social behavior (Hof and Van der Gucht, 2007).
The implementation flow diagram for WOA is presented in Fig. 17. Whale optimization algorithm is formulated based on the following steps:
-
i.
Initialization of population number, maximum iteration number and design variables.
-
ii.
For every design variable, compute fitness function for each search agent and pick up best solution (optimum) and other search agent tries to update their position to the best one.
-
iii.
Update the position for each search agent.
Figure 17.

Whale optimization implementation flow diagram.
Further readings and details of WOA can be seen in Mirjalili and Lewis (2016); Gharehchopogh and Gholizadeh (2019); Adhirai et al. (2018); Mirjalili et al. (2020); Mohammed et al. (2019).
4.14.1. Whale optimization algorithm for PID tuning
WOA is employed effectively to backup applications of several areas of study. An example of area of application includes engineering optimization problems. Articulating appropriate problems and defining suitable parameters and objective functions are the main concerns that can aid effectual problem solving while handling engineering applications. Appropriate usage of operators, variable settings, and population illustration are the major concerns regarding optimization algorithms.
WOA applications in engineering are classified into: Electrical engineering (Mirjalili et al., 2020), Civil Engineering (Kaveh and Rastegar Moghaddam, 2018), Classification, Clustering, Image Processing, Mechanical Engineering (Algabalawy et al., 2018), Robotics (Elhosseini et al., 2019), Computer Networks (Pham et al., 2020), Industrial Engineering (Khalilpourazari et al., 2019), Task Scheduling (Chen et al., 2020), and Control Engineering (Saha and Saikia, 2017), applications.
Though controllers may overcome some stability glitches nonetheless they do not resolve the problems of nonlinear loads, variable operating points and time delays. Optimization methods are used to overcome these problems through tuning the controller parameters. One of such techniques is WOA. Tuning of PID controller parameters using WOA for Load Frequency Control (LFC) of two-area interconnected non-reheat thermal power systems in order to maintain the system frequency at a prescheduled value in the presence of disturbances was presented in Bhatt et al. (2019). In Debnath et al. (2018), the parameters of a non-integer type PID controller was successfully tunes using Whale Optimization technique for the adjustment of frequency and interline power oscillations in multi-generation type unified system. Whale optimizer algorithm to regulate PID parameters for tracking control of 2-DOF robot manipulator was presented in Loucif et al. (2020). The results obtained witness the efficacy of WOA-PID in terms settling time, errors, and convergence time as well as its robustness for tuning parameters PID controller for robot tracking control with or without disturbances. Other plants controlled by PID and tuned with WOA include; AVR system (Mosaad et al., 2019a), DC-DC buck converter design (Hekimoğlu et al., 2018) and high-performance drilling machine (Kumar and Kumar, 2018).
5. Open research problems
Notwithstanding the accomplishments of modern metaheuristic algorithms, a number of important concerns remain unresolved. Heuristic algorithms' operating principles are well understood, although comprehending why they operate is only partially understood. Unfortunately, it is difficult to mathematically explain why these algorithms are so successful, despite some interesting previous efforts (Yang, 2011). These are, in fact, unsolved open research problems. To the best of our knowledge, except for mathematical study of SA and PSO, the convergence of any other methods has not been proven using mathematical models. As a result, any mathematical examination will provide important insight into algorithms. This will be useful for advancing more effective variants of these algorithms or demonstrating inventive approaches of constructing new algorithms.
Furthermore, it is only poorly understood why distinct components of heuristics and metaheuristics interact in an intelligent and stable manner to produce effective algorithms that aggregate under specified conditions. Why, for example, does a well-balanced mix of randomization and determinism produce a far more effective algorithm (than a pure deterministic or random algorithm)? How do you tell whether you have reached a state of stability? How can you demonstrate that memory usage can significantly improve an algorithm's search efficiency? What are the circumstances? It can be demonstrated from the well-known No-Free-Lunch assertions of 1997 (Wolpert et al., 1997) that they have been validated for single-objective optimization, but not for multiobjective optimization. What are the implications for algorithm design if they are proven to be true (or not) for multiobjective optimization?
Similarly, there is no universally accepted metric for comparing the performance of diverse algorithms; nonetheless, the assumed absolute objective value and the number of functional evaluations are two commonly used measures. The attempt to provide a universal framework was made by Shilane et al. (2008). A formal theoretical investigation, on the other hand, has yet to be formed (Chiarandini et al., 2007). This could be a fantastic place for students or scholars to conduct further investigation.
Natural World has a nearly infinite number of problem-solving strategies. Individuals are undoubtedly urged to design more powerful and efficient new generation algorithms through diligent observation. In nature, intelligence is a result of biological evolution. In the future, some intelligent algorithms (or systems) may originate, evolve, and modify appropriately to provide efficient and intelligent solutions to NP-hard optimization problems. Furthermore, a current trend is to use simple metaheuristic algorithms to solve difficult optimization problems. Possibly the need for more complicated metaheuristic algorithms that can genuinely mirror the exact operational technique of some natural or biological systems motivates the development of self-regulating, self-evolving, and fully intelligent metaheuristics in the long term.
Although the essential components of most algorithms are well understood, how they interact to achieve efficiency remains a secret, motivating further intensive research. Convergence analysis of a small number of algorithms, such as PSO, demonstrates some knowledge; nevertheless, common mathematical analysis of metaheuristic algorithms remains unsolved and is an important research area. The choice and precise use of a suitable algorithm is required for the solution of an optimization issue. The nature of the optimization problem is largely determined by the algorithm chosen. There is no defined policy as to how and what to choose for large-scale nonlinear global optimization issues. Indeed, it is not definite if an effective algorithm exists, which is especially true for NP-hard problems, which represent the majority of real-world problems.
In summary some of these open research problems include:
-
i.
Some metaheuristic algorithms, such as GWO, can be improved as their fundamental deficiency, notwithstanding their capacity to handle vast numbers of variables and evading local solutions when dealing with complex problems.
-
ii.
A hybrid metaheuristic algorithm can be created by combining memetic algorithms to solve several of their individual weaknesses.
-
iii.
To handle dynamic optimization challenges, certain recently proposed metaheuristic algorithms have to be changed.
-
iv.
A neutral trade-off between local amplification and global heterogeneity is required (Yang, 2011; Blum and Roli, 2003).
-
v.
When solving optimization problems, the parameters of metaheuristic algorithms have to be fine-tuned (Dokeroglu et al., 2019).
-
vi.
Metaheuristic algorithms with no parameters have to be developed.
-
vii.
Statistical analysis approaches for evaluating the performance of metaheuristic algorithms have to be developed.
-
viii.
To improve performance and resilience in solving emerging problems and cases, transfer learning is incorporated into metaheuristic algorithms (Talbi, 2020).
-
ix.
Speeding up execution time (process time) of metaheuristic algorithms. Some metaheuristic algorithms like population-based are slow solvers (Alba et al., 2013).
-
x.
Theoretical and mathematical models are needed for metaheuristic components like exploration versus exploitation, convergence, searching ability and local optimum versus global optimum (Hussain et al., 2019).
-
xi.
Development of a self-adapting, self-tuning, and self-evolving scalable metaheuristic algorithm. This is to allow algorithms to deal with the complicated and highly unbalanced landscapes of large optimization problems with a large number of decision variables (Hussain et al., 2019).
-
xii.
How can awareness about the traits and attributes of particular optimization problem classes and cases be acquired, articulated, and evaluated? (Sala and Müller, 2020).
-
xiii.
How to exploit knowledge or assumptions on particular properties of problem sub-sets or classes, in the selection or development of effective optimization strategies? (Sala and Müller, 2020).
6. Conclusion
This research provides an in-depth look at metaheuristic algorithms and their application to PID controller tuning. An overview of the current state-of-the-art metaheuristic algorithms employed for parameter tuning of PID controllers is provided. The efforts made by different scholars and researchers to solving tuning problems of PID controller parameters using metaheuristic algorithms were discussed. The evolution of metaheuristic algorithms over the years for optimization problems solving was examined. The basic architecture of PID controller and procedures involved tuning its parameters were looked into. The study surveyed some issues related to PID controller tuning and performance metrics utilized to measure effectiveness of tuning approaches for PID control. The challenges of metaheuristic optimization algorithms in efficiently handling issues of tuning was presented. A highlight of some open research problems associated with metaheuristic algorithms was offered. In general, the figure and volume of literature we reviewed revealed that significant progress have been made and will still be made in this area. Having presented open problems on metaheuristic algorithms, further research to improve the effectiveness of metaheuristic algorithms need to be done. This will make the development of metaheuristic algorithms remain an active research area for academicians and industrial practitioners researching metaheuristic optimization approaches for effective optimization and controller tuning. The goal and aspiration of this research is that researchers and students will use this study as a spring board or background for qualitative research in this field.
Declarations
Author contribution statement
All authors listed have significantly contributed to the development and the writing of this article.
Funding statement
This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors.
Data availability statement
No data was used for the research described in the article.
Declaration of interests statement
The authors declare no conflict of interest.
Additional information
No additional information is available for this paper.
References
- Aabid M., Elakkary A., Sefiani N. PID parameters optimization using ant-colony algorithm for human heart control. 2017 23rd International Conference on Automation and Computing; ICAC; IEEE; 2017. pp. 1–6. [Google Scholar]
- Abachizadeh M., Yazdi M.R.H., Yousefi-Koma A. 2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. IEEE; 2010. Optimal tuning of PID controllers using artificial bee colony algorithm; pp. 379–384. [Google Scholar]
- Abbasi E., Naghavi N. Offline auto-tuning of a PID controller using extended classifier system (XCS) algorithm. J. Adv. Comput. Eng. Technol. 2017;3:41–44. [Google Scholar]
- Abd El Aziz M., Hassanien A.E. Modified cuckoo search algorithm with rough sets for feature selection. Neural Comput. Appl. 2018;29:925–934. [Google Scholar]
- Abdel-Basset M., Abdel-Fatah L., Sangaiah A.K. Computational Intelligence for Multimedia Big Data on the Cloud with Engineering Applications. Elsevier; 2018. Metaheuristic algorithms: a comprehensive review; pp. 185–231. [Google Scholar]
- Abraham A., Nedjah N., de Macedo Mourelle L. Genetic Systems Programming. Springer; 2006. Evolutionary computation: from genetic algorithms to genetic programming; pp. 1–20. [Google Scholar]
- Abu-Mouti F.S., El-Hawary M.E. 2012 IEEE International Systems Conference SysCon 2012. IEEE; 2012. Overview of artificial bee colony (ABC) algorithm and its applications; pp. 1–6. [Google Scholar]
- Abualigah L.M., Khader A.T., Hanandeh E.S., Gandomi A.H. A novel hybridization strategy for krill herd algorithm applied to clustering techniques. Appl. Soft Comput. 2017;60:423–435. [Google Scholar]
- Adhirai S., Mahapatra R., Singh P. The whale optimization algorithm and its implementation in Matlab. Int. J. Comput. Inf. Eng. 2018;12:815–822. [Google Scholar]
- Adubi S.A., Misra S. A comparative study on the ant colony optimization algorithms. 2014 11th International Conference on Electronics, Computer and Computation; ICECCO; IEEE; 2014. pp. 1–4. [Google Scholar]
- Agarwal J., Parmar G., Gupta R., Sikander A. Analysis of grey wolf optimizer based fractional order PID controller in speed control of DC motor. Microsyst. Technol. 2018;24:4997–5006. [Google Scholar]
- Agarwal S., Yadav D., Verma A. Speed control of PMSM drive using bacterial foraging optimization. 2017 4th IEEE Uttar Pradesh Section International Conference on Electrical, Computer and Electronics; UPCON; IEEE; 2017. pp. 84–90. [Google Scholar]
- Agrawal V., Sharma H., Bansal J.C. Bacterial foraging optimization: a survey. Proceedings of the International Conference on Soft Computing for Problem Solving; SocProS 2011, December 20–22, 2011; Springer; 2012. pp. 227–242. [Google Scholar]
- Akbarzadeh A., Shadkam E. The study of cuckoo optimization algorithm for production planning problem. 2015. arXiv:1508.01310 arXiv preprint.
- Al-Azza A.A., Al-Jodah A.A., Harackiewicz F.J. Spider monkey optimization (SMO): a novel optimization technique in electromagnetics. 2016 IEEE Radio and Wireless Symposium; RWS; IEEE; 2016. pp. 238–240. [Google Scholar]
- Al-Betar M.A., Awadallah M.A., Faris H., Yang X.-S., Khader A.T., Alomari O.A. Bat-inspired algorithms with natural selection mechanisms for global optimization. Neurocomputing. 2018;273:448–465. [Google Scholar]
- Al-Tashi Q., Kadir S.J.A., Rais H.M., Mirjalili S., Alhussian H. Binary optimization using hybrid grey wolf optimization for feature selection. IEEE Access. 2019;7:39496–39508. [Google Scholar]
- Alam M.S., Singh A., Guha D. Optimal solutions of load frequency control problem using oppositional krill herd algorithm. 2016 IEEE First International Conference on Control, Measurement and Instrumentation; CMI; IEEE; 2016. pp. 6–10. [Google Scholar]
- Alba E., Luque G., Nesmachnow S. Parallel metaheuristics: recent advances and new trends. Int. Trans. Oper. Res. 2013;20:1–48. [Google Scholar]
- Algabalawy M.A., Abdelaziz A.Y., Mekhamer S.F., Aleem S.H.A. Considerations on optimal design of hybrid power generation systems using whale and sine cosine optimization algorithms. J. Electr. Syst. Inf. Technol. 2018;5:312–325. [Google Scholar]
- Ali A., Majhi S. 2006 IEEE International Conference on Industrial Technology. IEEE; 2006. Design of optimum PID controller by bacterial foraging strategy; pp. 601–605. [Google Scholar]
- Alikhani A., Suratgar A.A., Nouri K., Nouredanesh M., Salimi S. The 3rd International Conference on Control, Instrumentation, and Automation. IEEE; 2013. Optimal PID tuning based on krill herd optimization algorithm; pp. 11–15. [Google Scholar]
- de Almeida B.S.G., Leite V.C. In: Swarm Intelligence. Ser J.D., Villar E., Osaba E., editors. IntechOpen; Rijeka: 2019. Particle swarm optimization: a powerful technique for solving engineering problems. Chapter 3. [Google Scholar]
- Alqudah A., Malkawi A., Alwadie A., et al. Adaptive control of DC-DC converter using simulated annealing optimization method. J. Signal Inf. Process. 2014;5:198. [Google Scholar]
- Alsmadi M.K. Query-sensitive similarity measure for content-based image retrieval using meta-heuristic algorithm. J. King Saud Univ., Comput. Inf. Sci. 2018;30:373–381. [Google Scholar]
- Amaral J.M., Tanscheit R., Pacheco M.A. Tuning PID controllers through genetic algorithms. Complex Syst. 2018;2:3. [Google Scholar]
- Ang K.H., Chong G., Li Y. PID control system analysis, design, and technology. IEEE Trans. Control Syst. Technol. 2005;13:559–576. [Google Scholar]
- Annisa J., Darus I.Z.M., Tokhi M.O., Mohamaddan S. Implementation of PID based controller tuned by evolutionary algorithm for double link flexible robotic manipulator. 2018 International Conference on Computational Approach in Smart Systems Design and Applications; ICASSDA; IEEE; 2018. pp. 1–5. [Google Scholar]
- Anthony K., Ho P. Fundamental of PID control. 2020. https://pdhonline.com/courses/e331/e331content.pdf
- Arora S., Singh S. Butterfly optimization algorithm: a novel approach for global optimization. Soft Comput. 2019;23:715–734. [Google Scholar]
- Åström K.J., Hägglund T. Automatic tuning of simple regulators with specifications on phase and amplitude margins. Automatica. 1984;20:645–651. [Google Scholar]
- Åström K.J., Hägglund T. Instrument Society of America Research; Triangle Park, NC: 1995. PID Controllers: Theory, Design, and Tuning, vol. 2. [Google Scholar]
- Åström K.J., Hägglund T. Revisiting the Ziegler–Nichols step response method for PID control. J. Process Control. 2004;14:635–650. [Google Scholar]
- Atashpaz-Gargari E., Lucas C. 2007 IEEE Congress on Evolutionary Computation. 2007. Imperialist competitive algorithm: an algorithm for optimization inspired by imperialistic competition; pp. 4661–4667. [Google Scholar]
- Azad A.S., Vasant P., Watada J., Al Sokkalingam R. Handbook of Research on Smart Technology Models for Business and Industry. 2020. Meta-heuristic approaches for the optimization of hydropower energy: a review; pp. 351–375. [Google Scholar]
- Azar A.T., Ammar H.H., Ibrahim Z.F., Ibrahim H.A., Mohamed N.A., Taha M.A. International Conference on Advanced Intelligent Systems and Informatics. Springer; 2019. Implementation of PID controller with pso tuning for autonomous vehicle; pp. 288–299. [Google Scholar]
- Azman A.A., Rahiman M.H.F., Mohammad N.N., Marzaki M.H., Taib M.N., Ali M.F. Modeling and comparative study of PID Ziegler Nichols (ZN) and Cohen-Coon (CC) tuning method for multi-tube aluminum sulphate water filter (MTAS). 2017 IEEE 2nd International Conference on Automatic Control and Intelligent Systems; I2CACIS; IEEE; 2017. pp. 25–30. [Google Scholar]
- Bagis A., Senberber H. ABC algorithm based PID controller design for higher order oscillatory systems. Elektron. Elektrotech. 2017;23:3–9. [Google Scholar]
- Baker G. PID tuning of plants with time delay using root locus. 2011.
- Bansal H.O., Sharma R., Shreeraman P. PID controller tuning techniques: a review. J. Control Eng. Technol. 2012;2:168–176. [Google Scholar]
- Bansal R., Jain M., Bhushan B. Designing of multi-objective simulated annealing algorithm tuned PID controller for a temperature control system. 2014 6th IEEE Power India International Conference; PIICON; IEEE; 2014. pp. 1–6. [Google Scholar]
- Baselga S. Second order design of geodetic networks by the simulated annealing method. J. Surv. Eng. 2011;137:167–173. [Google Scholar]
- Bassi S.J., Mishra M.K., Omizegba E.E. Automatic tuning of proportional-integral-derivative (PID) controller using particle swarm optimization (PSO) algorithm. Int. J. Artif. Intell. Appl. 2011;2:25. [Google Scholar]
- Battiti R., Tecchiolli G. The reactive tabu search. ORSA J. Comput. 1994;6:126–140. doi: 10.1109/72.410361. [DOI] [PubMed] [Google Scholar]
- Bayoumi E.H.E., Salem F. PID controller for series-parallel resonant converters using bacterial foraging optimization. Electromotion Sci. J. 2012;19:64–78. [Google Scholar]
- Beheshti Z., Shamsuddin S.M.H. A review of population-based meta-heuristic algorithms. Int. J. Adv. Soft Comput. Appl. 2013;5:1–35. [Google Scholar]
- Beheshti Z., Shamsuddin S.M.H. CAPSO: centripetal accelerated particle swarm optimization. Inf. Sci. 2014;258:54–79. [Google Scholar]
- Benbouabdallah K., Zhu Q.-d. Bacterial foraging oriented by particle swarm optimization of a Lyapunov-based controller for mobile robot target tracking. 2013 Ninth International Conference on Natural Computation; ICNC; IEEE; 2013. pp. 506–511. [Google Scholar]
- Bennett S. IET; 1993. A History of Control Engineering, 1930–1955; p. 47. [Google Scholar]
- Bernstein D.S. What makes some control problems hard? IEEE Control Syst. Mag. 2002;22:8–19. [Google Scholar]
- Beyer H.-G., Schwefel H.-P. Evolution strategies – a comprehensive introduction. Nat. Comput. 2002;1:3–52. [Google Scholar]
- Bhandari A.K., Singh V.K., Kumar A., Singh G.K. Cuckoo search algorithm and wind driven optimization based study of satellite image segmentation for multilevel thresholding using Kapur's entropy. Expert Syst. Appl. 2014;41:3538–3560. [Google Scholar]
- Bharat S., Ganguly A., Chatterjee R., Basak B., Sheet D.K., Ganguly A. A review on tuning methods for PID controller. Asian J. Converg. Technol. 2019 [Google Scholar]
- Bhatt R., Parmar G., Gupta R. Performance analysis of WOA optimised PID controllers for LFC of interconnected thermal power systems. Int. J. Comput. Syst. Eng. 2019;5:179–192. [Google Scholar]
- Bhawana S., Neelu J. Tuning techniques of PID controller: a review. Int. J. Emerg. Technol. 2017;8(1):481–485. Special Issue NCETST-2017. [Google Scholar]
- Bingul Z., Karahan O. A novel performance criterion approach to optimum design of PID controller using cuckoo search algorithm for avr system. J. Franklin Inst. 2018;355:5534–5559. [Google Scholar]
- Biswas K., Vasant P.M., Vintaned J.A.G., Watada J. A review of metaheuristic algorithms for optimizing 3D well-path designs. Arch. Comput. Methods Eng. 2020 [Google Scholar]
- Biswas S., Kundu S., Bose D., Das S. International Conference on Swarm, Evolutionary, and Memetic Computing. Springer; 2012. Cooperative co-evolutionary teaching-learning based algorithm with a modified exploration strategy for large scale global optimization; pp. 467–475. [Google Scholar]
- Blum C., Roli A. Metaheuristics in combinatorial optimization: overview and conceptual comparison. ACM Comput. Surv. 2003;35:268–308. [Google Scholar]
- BoussaïD I., Lepagnot J., Siarry P. A survey on optimization metaheuristics. Inf. Sci. 2013;237:82–117. [Google Scholar]
- Boyd S., Baratt C., Norman S. Linear controller design: limits of performance via convex optimization. Proc. IEEE. 1990;78:529–574. [Google Scholar]
- Brabazon A., Cui W., O'Neill M. The raven roosting optimisation algorithm. Soft Comput. 2016;20:525–545. [Google Scholar]
- Brajevic I., Tuba M. Cuckoo Search and Firefly Algorithm. Springer; 2014. Cuckoo search and firefly algorithm applied to multilevel image thresholding; pp. 115–139. [Google Scholar]
- Brogliato B., Lozano R. Adaptive control of first-order nonlinear systems with reduced knowledge of the plant parameters. IEEE Trans. Autom. Control. 1994;39:1764–1768. [Google Scholar]
- Bulbul S.M.A., Pradhan M., Roy P.K., Pal T. Opposition-based krill herd algorithm applied to economic load dispatch problem. Ain Shams Eng. J. 2018;9:423–440. [Google Scholar]
- Burnwal S., Deb S. Scheduling optimization of flexible manufacturing system using cuckoo search-based approach. Int. J. Adv. Manuf. Technol. 2013;64:951–959. [Google Scholar]
- Černỳ V. Thermodynamical approach to the traveling salesman problem: an efficient simulation algorithm. J. Optim. Theory Appl. 1985;45:41–51. [Google Scholar]
- Chaib L., Choucha A., Arif S. Optimal design and tuning of novel fractional order PID power system stabilizer using a new metaheuristic bat algorithm. Ain Shams Eng. J. 2017;8:113–125. [Google Scholar]
- Chandrasekar K., Paramasivam B., Chidambaram I.A. Evaluation of power system restoration indices using krill herd algorithm based optimized pi+ controller for a restructured power system with facts devices. J. Eng. Appl. Sci. 2017;12:4973–4989. [Google Scholar]
- Chang W.-D., Chen C.-Y. PID controller design for MIMO processes using improved particle swarm optimization. Circuits Syst. Signal Process. 2014;33:1473–1490. [Google Scholar]
- Chang W.-D., Hwang R.-C., Hsieh J.-G. A multivariable on-line adaptive PID controller using auto-tuning neurons. Eng. Appl. Artif. Intell. 2003;16:57–63. [Google Scholar]
- Chatterjee S., Mukherjee V. PID controller for automatic voltage regulator using teaching–learning based optimization technique. Int. J. Electr. Power Energy Syst. 2016;77:418–429. [Google Scholar]
- Che Z., Chiang T.-A., Che Z.-G. Using analytic network process and turbo particle swarm optimization algorithm for non-balanced supply chain planning considering supplier relationship management. Trans. Inst. Meas. Control. 2012;34:720–735. [Google Scholar]
- Chen J., Tang Y., Ge R., An Q., Guo X. Reliability design optimization of composite structures based on PSO together with FEA. Chin. J. Aeronaut. 2013;26:343–349. [Google Scholar]
- Chen X., Cheng L., Liu C., Liu Q., Liu J., Mao Y., Murphy J. A WOA-based optimization approach for task scheduling in cloud computing systems. IEEE Syst. J. 2020 [Google Scholar]
- Chen X., Mei C., Xu B., Yu K., Huang X. Quadratic interpolation based teaching-learning-based optimization for chemical dynamic system optimization. Knowl.-Based Syst. 2018;145:250–263. [Google Scholar]
- Chen X., Xu B., Yu K., Du W. Teaching-learning-based optimization with learning enthusiasm mechanism and its application in chemical engineering. J. Appl. Math. 2018;2018 [Google Scholar]
- Cheng J., Li Y., Ren W. Application of enhanced particle swarm optimization algorithm in antiaircraft fire distribution. Ordnance Ind. Autom. 2008;4 [Google Scholar]
- Chiarandini M., Paquete L., Preuss M., Ridge E. 2007. Experiments on metaheuristics: Methodological overview and open issues. Technical Report Citeseer. [Google Scholar]
- Chiha I., Liouane N., Borne P. Tuning PID controller using multiobjective ant colony optimization. Appl. Comput. Intell. Soft Comput. 2012;2012 [Google Scholar]
- Cho Y., Smith J.S., Smith A.E. IEEE Congress on Evolutionary Computation. IEEE; 2010. Optimizing tactical military manets with a specialized pso; pp. 1–6. [Google Scholar]
- Chu S.-C., Tsai P.-W., Pan J.-S. Pacific Rim International Conference on Artificial Intelligence. Springer; 2006. Cat swarm optimization; pp. 854–858. [Google Scholar]
- Civicioglu P. Transforming geocentric Cartesian coordinates to geodetic coordinates by using differential search algorithm. Comput. Geosci. 2012;46:229–247. [Google Scholar]
- Cohen G. Theoretical consideration of retarded control. Trans. Am. Soc. Mech. Eng. 1953;75:827–834. [Google Scholar]
- Cooper M.A., Smeresky B. Advances in Spacecraft Attitude Control. IntechOpen; 2020. An overview of evolutionary algorithms toward spacecraft attitude control. [Google Scholar]
- Cordón O., Damas S., Santamaría J. A fast and accurate approach for 3d image registration using the scatter search evolutionary algorithm. Pattern Recognit. Lett. 2006;27:1191–1200. [Google Scholar]
- Cruz-Bernal A. Recent Advances on Meta-Heuristics and Their Application to Real Scenarios. 2013. Meta-heuristic optimization techniques and its applications in robotics; p. 53. [Google Scholar]
- Cruz-Chávez M.A., Martínez-Rangel M.G., Cruz-Rosales M.H. Accelerated simulated annealing algorithm applied to the flexible job shop scheduling problem. Int. Trans. Oper. Res. 2017;24:1119–1137. [Google Scholar]
- Dada E.G., Joseph S.B., Okunade O.A. Primal-dual asynchronous particle swarm optimisation (pdAPSO) hybrid metaheuristic algorithm for solving global optimisation problems. Am. J. Eng. Res. 2017;6:60–61. [Google Scholar]
- Dada E.G., Ramlan E.I. A hybrid primal-dual-PSO (pdipmPSO) algorithm for swarm robotics flocking strategy. 2015 Second International Conference on Computing Technology and Information Management; ICCTIM; IEEE; 2015. pp. 93–98. [Google Scholar]
- Dada E.G., Ramlan E.I. PDPSO: the fusion of primal-dual interior point method and particle swarm optimization algorithm. Malays. J. Comput. Sci. 2018;31:17–34. [Google Scholar]
- Dada I.G., Ramlana I. A novel control algorithm for multi-robot pattern formation. Int. J. Adv. Res. Comput. Sci. Tech. 2013;4:10–17. [Google Scholar]
- Das K.R., Das D., Das J. Optimal tuning of PID controller using GWO algorithm for speed control in DC motor. 2015 International Conference on Soft Computing Techniques and Implementations; ICSCTI; IEEE; 2015. pp. 108–112. [Google Scholar]
- Das S., Biswas A., Dasgupta S., Abraham A. Foundations of Computational Intelligence Volume 3. Springer; 2009. Bacterial foraging optimization algorithm: theoretical foundations, analysis, and applications; pp. 23–55. [Google Scholar]
- Datta A., Nandakumar S. A survey on bio inspired meta heuristic based clustering protocols for wireless sensor networks. IOP Conf. Ser., Mater. Sci. Eng. 2017;263 [Google Scholar]
- Debnath M.K., Patel N.C., Choudhury S. Load frequency control based on non-integer type PID controller tuned by WOA. 2018 2nd IEEE International Conference on Power Electronics, Intelligent Control and Energy Systems; ICPEICES; IEEE; 2018. pp. 114–119. [Google Scholar]
- Dey N., Ashour A.S. Advancements in Applied Metaheuristic Computing. IGI Global; 2018. Meta-heuristic algorithms in medical image segmentation: a review; pp. 185–203. [Google Scholar]
- Ding L., Wu H., Yao Y. Chaotic artificial bee colony algorithm for system identification of a small-scale unmanned helicopter. Int. J. Aerosp. Eng. 2015;2015 [Google Scholar]
- Divya N., Nirmalkumar A. A survey on tuning of PID controller for industrial process using soft computing techniques. Int. J. Pure Appl. Math. 2018;118:663–667. [Google Scholar]
- Dixit M.L., Pragati Joshi Ajay. A survey: PID optimization for automatic voltage regulator. Int. J. Eng. Sci. Res. Tech. 2016;5(6):404–406. [Google Scholar]
- Dokeroglu T., Sevinc E., Kucukyilmaz T., Cosar A. A survey on new generation metaheuristic algorithms. Comput. Ind. Eng. 2019;137 [Google Scholar]
- Dong R., Wang S., Wang G., Wang X. Hybrid optimization algorithm based on wolf pack search and local search for solving traveling salesman problem. J. Shanghai Jiaotong Univ. 2019;24:41–47. [Google Scholar]
- Donyagard Vahed N., Ghobaei-Arani M., Souri A. Multiobjective virtual machine placement mechanisms using nature-inspired metaheuristic algorithms in cloud environments: a comprehensive review. Int. J. Commun. Syst. 2019;32 [Google Scholar]
- Dorigo M. Politecnico di Milano; Italy: 1992. Optimization, learning and natural algorithms. PhD thesis. [Google Scholar]
- Dorigo M., Birattari M., Stutzle T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006;1:28–39. [Google Scholar]
- Dorigo M., Maniezzo V., Colorni A. Ant system: optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 1996;26:29–41. doi: 10.1109/3477.484436. [DOI] [PubMed] [Google Scholar]
- DrEO J., Aumasson J.-P., Tfaili W., Siarry P. Adaptive learning search, a new tool to help comprehending metaheuristics. Int. J. Artif. Intell. Tools. 2007;16:483–505. [Google Scholar]
- Eberhart R., Kennedy J. MHS'95. Proceedings of the Sixth International Symposium on Micro Machine and Human Science. IEEE; 1995. A new optimizer using particle swarm theory; pp. 39–43. [Google Scholar]
- Eglese R.W. Simulated annealing: a tool for operational research. Eur. J. Oper. Res. 1990;46:271–281. [Google Scholar]
- El-Deen A.T., Mahmoud A.A.H., El-Sawi A.R. Optimal PID tuning for DC motor speed controller based on genetic algorithm. Int. Rev. Autom. Control. 2015;8:80–85. [Google Scholar]
- El-Telbany M.E. Tuning PID controller for DC motor: an artificial bees optimization approach. Int. J. Comput. Appl. 2013;77 [Google Scholar]
- Elhosseini M.A., Haikal A.Y., Badawy M., Khashan N. Biped robot stability based on an A-C parametric whale optimization algorithm. J. Comput. Sci. 2019;31:17–32. [Google Scholar]
- Elshaer R., Awad H. A taxonomic review of metaheuristic algorithms for solving the vehicle routing problem and its variants. Comput. Ind. Eng. 2020;140 [Google Scholar]
- Elsrogy W.M., Fkirin M.A., Hassan M.A.M. Speed control of DC motor using PID controller based on artificial intelligence techniques. 2013 International Conference on Control, Decision and Information Technologies; CoDIT; IEEE; 2013. pp. 196–201. [Google Scholar]
- Emary E., Zawbaa H.M., Grosan C., Hassenian A.E. Afro-European Conference for Industrial Advancement. Springer; 2015. Feature subset selection approach by gray-wolf optimization; pp. 1–13. [Google Scholar]
- Emary E., Zawbaa H.M., Hassanien A.E. Binary grey wolf optimization approaches for feature selection. Neurocomputing. 2016;172:371–381. [Google Scholar]
- Emmanuel A.C., Inyiama H. A survey of controller design methods for a robot manipulator in harsh environments. Eur. J. Eng. Technol. 2015;3:64–73. [Google Scholar]
- Eshtay M., Faris H., Obeid N. Improving extreme learning machine by competitive swarm optimization and its application for medical diagnosis problems. Expert Syst. Appl. 2018;104:134–152. [Google Scholar]
- Expósito-Izquierdo C., Expósito-Márquez A. Handbook of Research on Soft Computing and Nature-Inspired Algorithms. IGI Global; 2017. A survey of the cuckoo search and its applications in real-world optimization problems; pp. 541–555. [Google Scholar]
- Farmer J.D., Packard N.H., Perelson A.S. The immune system, adaptation, and machine learning. Physica D. 1986;22:187–204. [Google Scholar]
- Findik O. Bull optimization algorithm based on genetic operators for continuous optimization problems. Turk. J. Electr. Eng. Comput. Sci. 2015;23:2225–2239. [Google Scholar]
- Fister D., Fister I., Jr., Fister I., Šafarič R. Parameter tuning of PID controller with reactive nature-inspired algorithms. Robot. Auton. Syst. 2016;84:64–75. [Google Scholar]
- Fister I., Yang X.-S., Fister D. Cuckoo Search and Firefly Algorithm. Springer; 2014. Cuckoo search: a brief literature review; pp. 49–62. [Google Scholar]
- Fonseca C.M., Fleming P.J. Icga. 1993. Genetic algorithms for multiobjective optimization: formulationdiscussion and generalization; pp. 416–423. Citeseer volume 93. [Google Scholar]
- Fouskakis D., Draper D. Stochastic optimization: a review. Int. Stat. Rev. 2002;70:315–349. [Google Scholar]
- Fraga-Gonzalez L.F., Fuentes-Aguilar R.Q., Garcia-Gonzalez A., Sanchez-Ante G. Adaptive simulated annealing for tuning PID controllers. AI Commun. 2017;30:347–362. [Google Scholar]
- Freeman R.A., Krstić M., Kokotović P. Robustness of adaptive nonlinear control to bounded uncertainties. Automatica. 1998;34:1227–1230. [Google Scholar]
- Fu Z., Pun C.-M., Gao H., Lu H. Endmember extraction of hyperspectral remote sensing images based on an improved discrete artificial bee colony algorithm and genetic algorithm. Mob. Netw. Appl. 2020;25:1033–1041. [Google Scholar]
- Gandomi A.H., Alavi A.H. Krill herd: a new bio-inspired optimization algorithm. Commun. Nonlinear Sci. Numer. Simul. 2012;17:4831–4845. [Google Scholar]
- Gandomi A.H., Yang X.-S. Chaotic bat algorithm. J. Comput. Sci. 2014;5:224–232. [Google Scholar]
- Gandomi A.H., Yang X.-S., Talatahari S., Alavi A.H. Firefly algorithm with chaos. Commun. Nonlinear Sci. Numer. Simul. 2013;18:89–98. [Google Scholar]
- Ganguly S., Sahoo N., Das D. Multi-objective particle swarm optimization based on fuzzy-Pareto-dominance for possibilistic planning of electrical distribution systems incorporating distributed generation. Fuzzy Sets Syst. 2013;213:47–73. [Google Scholar]
- Garpinger O., Hägglund T., Åström K.J. Performance and robustness trade-offs in PID control. J. Process Control. 2014;24:568–577. [Google Scholar]
- Geem Z.W. Solution quality improvement in chiller loading optimization. Appl. Therm. Eng. 2011;31:1848–1851. [Google Scholar]
- Geem Z.W., Kim J.H., Loganathan G.V. A new heuristic optimization algorithm: harmony search. Simulation. 2001;76:60–68. [Google Scholar]
- Gharehchopogh F.S., Gholizadeh H. A comprehensive survey: whale optimization algorithm and its applications. Swarm Evol. Comput. 2019;48:1–24. [Google Scholar]
- Gholap V., Naik Dessai C., Bagyaveereswaran V. PID controller tuning using metaheuristic optimization algorithms for benchmark problems. Mater. Sci. Eng. Conf. Ser. 2017;263 [Google Scholar]
- Ghosal S., Darbar R., Neogi B., Das A., Tibarewala D.N. Application of swarm intelligence computation techniques in PID controller tuning: a review. Proceedings of the International Conference on Information Systems Design and Intelligent Applications 2012; INDIA 2012, Held in Visakhapatnam, India, January 2012; Springer; 2012. pp. 195–208. [Google Scholar]
- Glover F. Interfaces in Computer Science and Operations Research. Springer; 1997. Tabu search and adaptive memory programming advances, applications and challenges; pp. 1–75. [Google Scholar]
- Gogna A., Tayal A. Metaheuristics: review and application. J. Exp. Theor. Artif. Intell. 2013;25:503–526. [Google Scholar]
- Goldbogen J.A., Friedlaender A.S., Calambokidis J., Mckenna M.F., Simon M., Nowacek D.P. Integrative approaches to the study of baleen whale diving behavior, feeding performance, and foraging ecology. BioScience. 2013;63:90–100. [Google Scholar]
- Goldenberg D.E. Genetic algorithms in search, optimization and machine learning. 1989.
- Grimm G., Messina M.J., Tuna S.E., Teel A.R. Nominally robust model predictive control with state constraints. IEEE Trans. Autom. Control. 2007;52:1856–1870. [Google Scholar]
- Haber R.E., Haber-Haber R., Del Toro R.M., Alique J.R. International Work-Conference on Artificial Neural Networks. Springer; 2007. Using simulated annealing for optimal tuning of a PID controller for time-delay systems. An application to a high-performance drilling process; pp. 1155–1162. [Google Scholar]
- Haddad O.B., Afshar A., Mariño M.A. Honey-bees mating optimization (HBMO) algorithm: a new heuristic approach for water resources optimization. Water Resour. Manag. 2006;20:661–680. [Google Scholar]
- Hägglund T., Åström K.J. Industrial adaptive controllers based on frequency response techniques. Automatica. 1991;27:599–609. [Google Scholar]
- Hahn J. Handbook of PI and PID controller tuning rules-[book review] IEEE Control Syst. Mag. 2006;26:92–93. [Google Scholar]
- Hajihassani M., Armaghani D.J., Kalatehjari R. Applications of particle swarm optimization in geotechnical engineering: a comprehensive review. Geotech. Geolog. Eng. 2018;36:705–722. [Google Scholar]
- Hambali N., Masngut A., Ishak A.A., Janin Z. Process controllability for flow control system using Ziegler-Nichols (ZN), Cohen-Coon (CC) and Chien-Hrones-Reswick (CHR) tuning methods. 2014 IEEE International Conference on Smart Instrumentation, Measurement and Applications; ICSIMA; IEEE; 2014. pp. 1–6. [Google Scholar]
- Hang C.C., Åström K.J., Ho W.K. IEE Proceedings D (Control Theory and Applications) vol. 138. IET; 1991. Refinements of the Ziegler–Nichols tuning formula; pp. 111–118. [Google Scholar]
- Hanseth O., Aanestad M. Design as bootstrapping. On the evolution of ICT networks in health care. Methods Inf. Med. 2003;42:385–391. [PubMed] [Google Scholar]
- Harifi S., Khalilian M., Mohammadzadeh J., Ebrahimnejad S. Emperor penguins colony: a new metaheuristic algorithm for optimization. Evol. Intell. 2019;12:211–226. [Google Scholar]
- Harris T.J. Assessment of control loop performance. Can. J. Chem. Eng. 1989;67:856–861. [Google Scholar]
- Hekimoğlu B., Ekinci S., Kaya S. Optimal PID controller design of DC-DC buck converter using whale optimization algorithm. 2018 International Conference on Artificial Intelligence and Data Processing; IDAP; IEEE; 2018. pp. 1–6. [Google Scholar]
- Herlambang T., Rahmalia D., Yulianto T. Journal of Physics: Conference Series. vol. 1211. 2019. Particle swarm optimization (PSO) and ant colony optimization (ACO) for optimizing PID parameters on autonomous underwater vehicle (AUV) control system. (IOP Publishing). 012039. [Google Scholar]
- Hernandez J., Salto C., Minetti G., Carnero M., Sanchez M.C. Hybrid simulated annealing for optimal cost instrumentation in chemical plants. Chem. Eng. Trans. 2019;74:709–714. [Google Scholar]
- Ho W.K., Gan O., Tay E.B., Ang E. Performance and gain and phase margins of well-known PID tuning formulas. IEEE Trans. Control Syst. Technol. 1996;4:473–477. [Google Scholar]
- Hof P.R., Van der Gucht E. Structure of the cerebral cortex of the humpback whale, megaptera novaeangliae (cetacea, mysticeti, balaenopteridae). The anatomical record: advances in integrative anatomy and evolutionary biology. Adv. Integr. Anat. Evol. Biol. 2007;290:1–31. doi: 10.1002/ar.20407. [DOI] [PubMed] [Google Scholar]
- Holland J.H. The University of Michigan Press; 1975. Adaptation in Natural and Artificial Systems Ann Arbor, vol. 1; p. 975. [Google Scholar]
- Hosseini H.S. 2007 IEEE Congress on Evolutionary Computation. IEEE; 2007. Problem solving by intelligent water drops; pp. 3226–3231. [Google Scholar]
- Houssein E.H., Saad M.R., Hashim F.A., Shaban H., Hassaballah M. Lévy flight distribution: a new metaheuristic algorithm for solving engineering optimization problems. Eng. Appl. Artif. Intell. 2020;94 [Google Scholar]
- Huang B., Shah S., Kwok E. Good, bad or optimal? Performance assessment of multivariable processes. Automatica. 1997;33:1175–1183. [Google Scholar]
- Huang B., Shah S.L. Springer Science & Business Media; 1999. Performance Assessment of Control Loops: Theory and Applications. [Google Scholar]
- Hussain K., Salleh M.N.M., Cheng S., Shi Y. Metaheuristic research: a comprehensive survey. Artif. Intell. Rev. 2019;52:2191–2233. [Google Scholar]
- Hussain K.M., Zepherin R.A.R., Shantha M. Comparison of PID controller tuning methods with genetic algorithm for FOPTD system. Criterion. 2014;16:17. [Google Scholar]
- Hussien A.G., Amin M., Abd El Aziz M. A comprehensive review of moth-flame optimisation: variants, hybrids, and applications. J. Exp. Theor. Artif. Intell. 2020;32:705–725. [Google Scholar]
- Huynh B.-P., Su S.-F., Kuo Y.-L. Vision/position hybrid control for a hexa robot using bacterial foraging optimization in real-time pose adjustment. Symmetry. 2020;12:564. [Google Scholar]
- Jackson W.G., Özcan E., John R.I. Move acceptance in local search metaheuristics for cross-domain search. Expert Syst. Appl. 2018;109:131–151. [Google Scholar]
- Jain M., Singh V., Rani A. A novel nature-inspired algorithm for optimization: squirrel search algorithm. Swarm Evol. Comput. 2019;44:148–175. [Google Scholar]
- Jain N., Gupta R., Parmar G. A review of soft computing techniques for PID controller tuning. Int. J. Adv. Electr. Electron. Eng. 2012;1:221–224. [Google Scholar]
- James J., Li V.O. A social spider algorithm for global optimization. Appl. Soft Comput. 2015;30:614–627. [Google Scholar]
- Jasim M.H. Tuning of a PID controller by bacterial foraging algorithm for position control of DC servo motor. Eng. Technol. J. 2018;36 [Google Scholar]
- Javidy B., Hatamlou A., Mirjalili S. Ions motion algorithm for solving optimization problems. Appl. Soft Comput. 2015;32:72–79. [Google Scholar]
- Jayabarathi T., Raghunathan T., Gandomi A. Nature-Inspired Algorithms and Applied Optimization. Springer; 2018. The bat algorithm, variants and some practical engineering applications: a review; pp. 313–330. [Google Scholar]
- Jayanth J., Koliwad S., Kumar T.A. Classification of remote sensed data using artificial bee colony algorithm. Egypt. J. Remote Sens. Space Sci. 2015;18:119–126. [Google Scholar]
- Jhankal N.K., Adhyaru D. 2011 Nirma University International Conference on Engineering. IEEE; 2011. Bacterial foraging optimization algorithm: a derivative free technique; pp. 1–4. [Google Scholar]
- Jia F., Lichti D. A comparison of simulated annealing, genetic algorithm and particle swarm optimization in optimal first-order design of indoor TLS networks. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci. 2017;4 [Google Scholar]
- Jin Q., Shi Y., Liu Q., Chu M., Zhang Y. Graphical robust PID tuning for disturbance rejection satisfying multiple objectives. Chem. Eng. Commun. 2018;205:1701–1711. [Google Scholar]
- Johnson M., Moradi M. Springer; London: 2005. PID Control. [Google Scholar]
- Joseph S.B., Dada E.G. Proportional-integral-derivative (PID) controller tuning for an inverted pendulum using particle swarm optimisation (PSO) algorithm. FUDMA J. Sci. 2018;2:72–78. [Google Scholar]
- Joseph S.B., Emmanuel G.D. Automatic tuning of proportional integral derivative controller using genetic algorithm. Pac. J. Sci. Technol. 2018;19:51–57. [Google Scholar]
- Kalaiselvi D., Radhakrishnan R. Multiconstrained qos routing using a differentially guided krill herd algorithm in mobile ad hoc networks. Math. Probl. Eng. 2015 [Google Scholar]
- Kaliannan J., Baskaran A., Dey N., Ashour A.S. Ant colony optimization algorithm based PID controller for LFC of single area power system with non-linearity and boiler dynamics. World J. Model. Simul. 2016;12:3–14. [Google Scholar]
- Kaloust J., Qu Z. Robust control design for nonlinear uncertain systems with an unknown time-varying control direction. IEEE Trans. Autom. Control. 1997;42:393–399. [Google Scholar]
- Kalra M., Singh S. A review of metaheuristic scheduling techniques in cloud computing. Egypt. Inform. J. 2015;16:275–295. [Google Scholar]
- Karaboga D. Erciyes University, Engineering Faculty; 2005. An idea based on honey bee swarm for numerical optimization. Technical Report Technical report-tr06. [Google Scholar]
- Karaboga D. Artificial bee colony algorithm. Scholarpedia. 2010;5:6915. [Google Scholar]
- Karthick P., Palanisamy C. Optimized cluster head selection using krill herd algorithm for wireless sensor network. Automatika. 2019;60:340–348. [Google Scholar]
- Kashan A.H. 2009 International Conference of Soft Computing and Pattern Recognition. IEEE; 2009. League championship algorithm: a new algorithm for numerical function optimization; pp. 43–48. [Google Scholar]
- Katal N., Kumar P., Narayan S. Optimal PID controller for coupled-tank liquid-level control system using bat algorithm. 2014 International Conference on Power, Control and Embedded Systems; ICPCES; IEEE; 2014. pp. 1–4. [Google Scholar]
- Kaushik A., Indu S., Gupta D. A grey wolf optimization approach for improving the performance of wireless sensor networks. Wirel. Pers. Commun. 2019;106:1429–1449. [Google Scholar]
- Kaveh A., Mahdavi V. Colliding bodies optimization: a novel meta-heuristic method. Comput. Struct. 2014;139:18–27. [Google Scholar]
- Kaveh A., Rastegar Moghaddam M. A hybrid woa-cbo algorithm for construction site layout planning problem. Sci. Iran. 2018;25:1094–1104. [Google Scholar]
- Kaveh A., Zaerreza A. Engineering Computations. 2020. Shuffled shepherd optimization method: a new meta-heuristic algorithm. [Google Scholar]
- Kennedy J., Eberhart R. Proceedings of ICNN'95-International Conference on Neural Networks. vol. 4. 1995. Particle swarm optimization; pp. 1942–1948. (IEEE). [Google Scholar]
- Khairuzzaman A.K.M., Chaudhury S. Multilevel thresholding using grey wolf optimizer for image segmentation. Expert Syst. Appl. 2017;86:64–76. [Google Scholar]
- Khalilpourazari S., Pasandideh S.H.R., Ghodratnama A. Robust possibilistic programming for multi-item eoq model with defective supply batches: whale optimization and water cycle algorithms. Neural Comput. Appl. 2019;31:6587–6614. [Google Scholar]
- Khare A., Rangnekar S. A review of particle swarm optimization and its applications in solar photovoltaic system. Appl. Soft Comput. 2013;13:2997–3006. [Google Scholar]
- Kim D.H., Cho J.H. International Atlantic Web Intelligence Conference. Springer; 2005. Adaptive tuning of PID controller for multivariable system using bacterial foraging based optimization; pp. 231–235. [Google Scholar]
- Kim D.H., Cho J.H. A biologically inspired intelligent PID controller tuning for AVR systems. Int. J. Control. Autom. Syst. 2006;4:624–636. [Google Scholar]
- Kim D.H., Hong W.P., Park J.I. Proceedings of the 2002 Congress on Evolutionary Computation. CEC'02 (Cat. No. 02TH8600) vol. 1. 2002. Auto-tuning of reference model based PID controller using immune algorithm; pp. 483–488. (IEEE). [Google Scholar]
- Kirkpatrick S., Gelatt C.D., Vecchi M.P. Optimization by simulated annealing. Science. 1983;220:671–680. doi: 10.1126/science.220.4598.671. [DOI] [PubMed] [Google Scholar]
- Kohli M., Arora S. Chaotic grey wolf optimization algorithm for constrained optimization problems. J. Comput. Des. Eng. 2018;5:458–472. [Google Scholar]
- Korani W.M., Dorrah H.T., Emara H.M. Bacterial foraging oriented by particle swarm optimization strategy for PID tuning. 2009 IEEE International Symposium on Computational Intelligence in Robotics and Automation; CIRA; IEEE; 2009. pp. 445–450. [Google Scholar]
- Kotteeswaran R., Sivakumar L. International Conference on Swarm, Evolutionary, and Memetic Computing. Springer; 2013. Optimal partial-retuning of decentralised PI controller of coal gasifier using bat algorithm; pp. 750–761. [Google Scholar]
- Kowalski P.A., Łukasik S. Training neural networks with krill herd algorithm. Neural Process. Lett. 2016;44:5–17. [Google Scholar]
- Krishnakumar K., Goldberg D.E. Control system optimization using genetic algorithms. J. Guid. Control Dyn. 1992;15:735–740. [Google Scholar]
- Krishnanand K., Ghose D. Detection of multiple source locations using a glowworm metaphor with applications to collective robotics. Proceedings 2005 IEEE Swarm Intelligence Symposium, 2005; SIS 2005; IEEE; 2005. pp. 84–91. [Google Scholar]
- Kumar A., Bawa S. Generalized ant colony optimizer: swarm-based meta-heuristic algorithm for cloud services execution. Computing. 2018:1–24. [Google Scholar]
- Kumar A., Bawa S. A comparative review of meta-heuristic approaches to optimize the SLA violation costs for dynamic execution of cloud services. Soft Comput. 2020;24:3909–3922. [Google Scholar]
- Kumar A., Kumar D., Jarial S. A review on artificial bee colony algorithms and their applications to data clustering. Cybern. Inf. Technol. 2017;17:3–28. [Google Scholar]
- Kumar A.A., Kumar S.G. ICAARS 2018. 2018. Application of whale optimization algorithm for tuning of a PID controller for a drilling machine. [Google Scholar]
- Kumar N., Vidyarthi D.P. A novel hybrid pso–ga meta-heuristic for scheduling of dag with communication on multiprocessor systems. Eng. Comput. 2016;32:35–47. [Google Scholar]
- Kumar P., Nema S., Padhy P. PID controller for nonlinear system using cuckoo optimization. 2014 International Conference on Control, Instrumentation, Communication and Computational Technologies; ICCICCT; IEEE; 2014. pp. 711–716. [Google Scholar]
- Kumar R., Singla S., Chopra V. Comparison among some well known control schemes with different tuning methods. J. Appl. Res. Technol. 2015;13:409–4015. [Google Scholar]
- Kumari S., Arumugam M. Application of bio-inspired krill herd algorithm for breast cancer classification and diagnosis. Indian J. Sci. Technol. 2015;8 [Google Scholar]
- Kushwah M., Patra A. Tuning PID controller for speed control of DC motor using soft computing techniques-a review. Adv. Electron. Electr. Eng. 2014;4:141–148. [Google Scholar]
- Lahcene R., Abdeldjalil S., Aissa K. Optimal tuning of fractional order PID controller for AVR system using simulated annealing optimization algorithm. 2017 5th International Conference on Electrical Engineering-Boumerdes; ICEE-B; IEEE; 2017. pp. 1–6. [Google Scholar]
- Latha K., Rajinikanth V., Surekha P.M. ISRN Artificial Intelligence. 2013. PSO-based PID controller design for a class of stable and unstable systems. [Google Scholar]
- Lazar M., Heemels W. Predictive control of hybrid systems: input-to-state stability results for sub-optimal solutions. Automatica. 2009;45:180–185. [Google Scholar]
- Lee K.Y., Park J.-B. 2006 IEEE PES Power Systems Conference and Exposition. IEEE; 2006. Application of particle swarm optimization to economic dispatch problem: advantages and disadvantages; pp. 188–192. [Google Scholar]
- Lequin O., Gevers M., Triest L. Optimizing the settling time with iterative feedback tuning. IFAC Proc. Vol. 1999;32:4659–4663. [Google Scholar]
- Li J., Tang Y., Hua C., Guan X. An improved krill herd algorithm: krill herd with linear decreasing step. Appl. Math. Comput. 2014;234:356–367. [Google Scholar]
- Li L., Sun L., Guo J., Qi J., Xu B., Li S. Modified discrete grey wolf optimizer algorithm for multilevel image thresholding. Comput. Intell. Neurosci. 2017;2017 doi: 10.1155/2017/3295769. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Li Q., Chen H., Huang H., Zhao X., Cai Z., Tong C., Liu W., Tian X. An enhanced grey wolf optimization based feature selection wrapped kernel extreme learning machine for medical diagnosis. Comput. Math. Methods Med. 2017;2017 doi: 10.1155/2017/9512741. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Li X., Zhang J., Yin M. Animal migration optimization: an optimization algorithm inspired by animal migration behavior. Neural Comput. Appl. 2014;24:1867–1877. [Google Scholar]
- Li X.H., Yu H.B., Yuan M.Z. 2009 International Conference on Information Engineering and Computer Science. IEEE; 2009. Design of an optimal PID controller based on Lyapunov approach; pp. 1–5. [Google Scholar]
- Liao W., Hu Y., Wang H. Proceedings of the 2014 International Conference on Advanced Mechatronic Systems. IEEE; 2014. Optimization of PID control for DC motor based on artificial bee colony algorithm; pp. 23–27. [Google Scholar]
- Lipták B.G. CRC Press; 2002. Instrument Engineers' Handbook: Process Measurement and Analysis. [Google Scholar]
- Liu J., Luo X.G., Zhang X.M., Zhang F. Advanced Materials Research. vol. 662. 2013. Job scheduling algorithm for cloud computing based on particle swarm optimization; pp. 957–960. (Trans. Tech. Publ.). [Google Scholar]
- Loucif F., Kechida S., Sebbagh A. Whale optimizer algorithm to tune PID controller for the trajectory tracking control of robot manipulator. J. Braz. Soc. Mech. Sci. Eng. 2020;42:1. [Google Scholar]
- Lozano R., Valera A., Albertos P., Arimoto S., Nakayama T. PD control of robot manipulators with joint flexibility, actuators dynamics and friction. Automatica. 1999;35:1697–1700. [Google Scholar]
- Luyben W.L. Simple method for tuning SISO controllers in multivariable systems. Ind. Eng. Chem. Process Des. Dev. 1986;25:654–660. [Google Scholar]
- Madadi A., Motlagh M.M. Optimal control of DC motor using grey wolf optimizer algorithm. Tech. J. Eng. Appl. Sci. 2014;4:373–379. [Google Scholar]
- Mamizadeh A., Genc N., Rajabioun R. Optimal tuning of PI controller for boost DC-DC converters based on cuckoo optimization algorithm. 2018 7th International Conference on Renewable Energy Research and Applications; ICRERA; IEEE; 2018. pp. 677–680. [Google Scholar]
- Man K.-F., Tang K.-S., Kwong S. Genetic algorithms: concepts and applications [in engineering design] IEEE Trans. Ind. Electron. 1996;43:519–534. [Google Scholar]
- Mange J., Pace S., Dunn A. Optimization of PID controller parameters for automated ground vehicle control on dynamic terrain. Proceedings of the International Conference on Scientific Computing; CSC; 2015. p. 3. [Google Scholar]
- Marinakis Y., Marinaki M. A bumble bees mating optimization algorithm for the open vehicle routing problem. Swarm Evol. Comput. 2014;15:80–94. [Google Scholar]
- Martins F.G. Tuning PID controllers using the ITAE criterion. Int. J. Eng. Educ. 2005;21:867. [Google Scholar]
- McFarlane D., Glover K. A loop-shaping design procedure using h/sub infinity/synthesis. IEEE Trans. Autom. Control. 1992;37:759–769. [Google Scholar]
- Medewar P., Munje R. 2015 International Conference on Energy Systems and Applications. IEEE; 2015. PSO based PID controller tuning for PMDC motor; pp. 522–526. [Google Scholar]
- Meena D., Devanshu A. Genetic algorithm tuned PID controller for process control. 2017 International Conference on Inventive Systems and Control; ICISC; IEEE; 2017. pp. 1–6. [Google Scholar]
- Mehrabian A.R., Lucas C. A novel numerical optimization algorithm inspired from weed colonization. Ecol. Inform. 2006;1:355–366. [Google Scholar]
- Meng A.-b., Chen Y.-c., Yin H., Chen S.-z. Crisscross optimization algorithm and its application. Knowl.-Based Syst. 2014;67:218–229. [Google Scholar]
- Metropolis N., Rosenbluth A.W., Rosenbluth M.N., Teller A.H., Teller E. Equation of state calculations by fast computing machines. J. Chem. Phys. 1953;21:1087–1092. [Google Scholar]
- Mirjalili S., Lewis A. The whale optimization algorithm. Adv. Eng. Softw. 2016;95:51–67. [Google Scholar]
- Mirjalili S., Mirjalili S.M., Lewis A. Grey wolf optimizer. Adv. Eng. Softw. 2014;69:46–61. [Google Scholar]
- Mirjalili S., Mirjalili S.M., Saremi S., Mirjalili S. Nature-Inspired Optimizers. Springer; 2020. Whale optimization algorithm: theory, literature review, and application in designing photonic crystal filters; pp. 219–238. [Google Scholar]
- Mohammed H.M., Umar S.U., Rashid T.A. A systematic and meta-analysis survey of whale optimization algorithm. Comput. Intell. Neurosci. 2019;2019 doi: 10.1155/2019/8718571. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Mohammed N.F., Song E., Ma X., Hayat Q. 2014 IEEE International Conference on Mechatronics and Automation. IEEE; 2014. Tuning of PID controller of synchronous generators using genetic algorithm; pp. 1544–1548. [Google Scholar]
- Moradi M. New techniques for PID controller design. Proceedings of 2003 IEEE Conference on Control Applications; CCA 2003; IEEE; 2003. pp. 903–908. [Google Scholar]
- Mosaad A.M., Attia M.A., Abdelaziz A.Y. Whale optimization algorithm to tune PID and PIDA controllers on AVR system. Ain Shams Eng. J. 2019;10:755–767. [Google Scholar]
- Mosaad M.I., abed el Raouf M.O., Al-Ahmar M.A., Banakher F.A. Maximum power point tracking of PV system based cuckoo search algorithm; review and comparison. Energy Proc. 2019;162:117–126. [Google Scholar]
- Mucherino A., Seref O. AIP Conference Proceedings. vol. 953. 2007. Monkey search: a novel metaheuristic search for global optimization; pp. 162–173. (AIP). [Google Scholar]
- Mukherjee P., Das A., Bera P.S. International Conference on Innovation in Modern Science and Technology. Springer; 2019. Design of PID power system stabilizer using oppositional krill herd algorithm for a single machine infinite bus system; pp. 827–844. [Google Scholar]
- Muliadi J., Kusumoputro B. Neural network control system of UAV altitude dynamics and its comparison with the PID control system. J. Adv. Transp. 2018;2018 [Google Scholar]
- Muro C., Escobedo R., Spector L., Coppinger R. Wolf-pack (canis lupus) hunting strategies emerge from simple rules in computational simulations. Behav. Process. 2011;88:192–197. doi: 10.1016/j.beproc.2011.09.006. [DOI] [PubMed] [Google Scholar]
- Murrieta-Mendoza A., Botez R.M., Bunel A. Four-dimensional aircraft en route optimization algorithm using the artificial bee colony. J. Aerosp. Inform. Syst. 2018;15:307–334. [Google Scholar]
- Nagaraj B., Subha S., Rampriya B. Tuning algorithms for PID controller using soft computing techniques. Int. J. Comput. Sci. Netw. Secur. 2008;8:278–281. [Google Scholar]
- Nakrani S., Tovey C. On honey bees and dynamic server allocation in internet hosting centers. Adapt. Behav. 2004;12:223–240. [Google Scholar]
- Natarajan K., Gilbert A.F. On direct PID controller tuning based on finite number of frequency response data. ISA Trans. 1997;36:139–149. [Google Scholar]
- Nimisha K., Senthilkumar R. A survey on optimal tuning of PID controller for buck-boost converter using cuckoo-search algorithm. 2018 International Conference on Control, Power, Communication and Computing Technologies; ICCPCCT; IEEE; 2018. pp. 216–221. [Google Scholar]
- Nisi K., Nagaraj B., Agalya A. Tuning of a PID controller using evolutionary multi objective optimization methodologies and application to the pulp and paper industry. Int. J. Mach. Learn. Cybern. 2019;10:2015–2025. [Google Scholar]
- Niu B., Fan Y., Tan L., Rao J., Li L. International Conference on Intelligent Computing. Springer; 2010. A review of bacterial foraging optimization part II: applications and challenges; pp. 544–550. [Google Scholar]
- Niu B., Zhu Y., He X., Zeng X. 2006 6th World Congress on Intelligent Control and Automation. vol. 1. 2006. Optimum design of PID controllers using only a germ of intelligence; pp. 3584–3588. (IEEE). [Google Scholar]
- Nojhan Dreaming of metaheuristics. 2007. http://nojhan.free.fr/metah/index.php Available at.
- Passino K.M. Biomimicry of bacterial foraging for distributed optimization and control. IEEE Control Syst. Mag. 2002;22:52–67. [Google Scholar]
- Patel V.K., Savsani V.J. A multi-objective improved teaching–learning based optimization algorithm (MO-ITLBO) Inf. Sci. 2016;357:182–200. [Google Scholar]
- Patil N., Lakhekar G. Design of PID controller for cascade control process using genetic algorithm. 2017 International Conference on Intelligent Computing and Control Systems; ICICCS; IEEE; 2017. pp. 1089–1095. [Google Scholar]
- Peram M., Mishra S., Vemulapaty M., Verma B., Padhy P.K. Optimal PI-PD and I-PD controller design using cuckoo search algorithm. 2018 5th International Conference on Signal Processing and Integrated Networks; SPIN; IEEE; 2018. pp. 643–646. [Google Scholar]
- Pham Q.-V., Mirjalili S., Kumar N., Alazab M., Hwang W.-J. Whale optimization algorithm with applications to resource allocation in wireless networks. IEEE Trans. Veh. Technol. 2020;69:4285–4297. [Google Scholar]
- Pierezan J., Coelho L.D.S. Coyote optimization algorithm: a new metaheuristic for global optimization problems. 2018 IEEE Congress on Evolutionary Computation; CEC; IEEE; 2018. pp. 1–8. [Google Scholar]
- Pijarski P., Kacejko P. A new metaheuristic optimization method: the algorithm of the innovative gunner (aig) Eng. Optim. 2019;51:2049–2068. [Google Scholar]
- Pilla R., Botcha N., Gorripotu T.S., Azar A.T. International Conference on Application of Robotics in Industry Using Advanced Mechanisms. Springer; 2019. Fuzzy PID controller for automatic generation control of interconnected power system tuned by glow-worm swarm optimization; pp. 140–149. [Google Scholar]
- Pirabakaran K., Becerra V. IECON'01. 27th Annual Conference of the IEEE Industrial Electronics Society (Cat. No. 37243) vol. 1. IEEE; 2001. Automatic tuning of PID controllers using model reference adaptive control techniques; pp. 736–740. [Google Scholar]
- Prasad L.B., Tyagi B., Gupta H.O. Optimal control of nonlinear inverted pendulum system using PID controller and LQR: performance analysis without and with disturbance input. Int. J. Autom. Comput. 2014;11:661–670. [Google Scholar]
- Premkumar K., Manikandan B. Bat algorithm optimized fuzzy pd based speed controller for brushless direct current motor. Int. J. Eng. Sci. Technol. 2016;19:818–840. [Google Scholar]
- Priyambada S., Mohanty P.K., Sahu B.K. Automatic voltage regulator using TLBO algorithm optimized PID controller. 2014 9th International Conference on Industrial and Information Systems; ICIIS; IEEE; 2014. pp. 1–6. [Google Scholar]
- Priyambodo T.K., Putra A.E., Dharmawan A. Optimizing control based on ant colony logic for quadrotor stabilization. 2015 IEEE International Conference on Aerospace Electronics and Remote Sensing Technology; ICARES; IEEE; 2015. pp. 1–4. [Google Scholar]
- Qasem S.N., Shamsuddin S.M. Memetic elitist Pareto differential evolution algorithm based radial basis function networks for classification problems. Appl. Soft Comput. 2011;11:5565–5581. [Google Scholar]
- Qi H., Altinakar M.S. A conceptual framework of agricultural land use planning with BMP for integrated watershed management. J. Environ. Manag. 2011;92:149–155. doi: 10.1016/j.jenvman.2010.08.023. [DOI] [PubMed] [Google Scholar]
- Qiao W., Yang Z. Modified dolphin swarm algorithm based on chaotic maps for solving high-dimensional function optimization problems. IEEE Access. 2019;7:110472–110486. [Google Scholar]
- Qin S.J. Control performance monitoring a review and assessment. Comput. Chem. Eng. 1998;23:173–186. [Google Scholar]
- Quwaider M., Shatnawi Y. Neural network model as internet of things congestion control using PID controller and immune-hill-climbing algorithm. Simul. Model. Pract. Theory. 2020;101 [Google Scholar]
- Rahmani M., Ghanbari A., Ettefagh M.M. Robust adaptive control of a bio-inspired robot manipulator using bat algorithm. Expert Syst. Appl. 2016;56:164–176. [Google Scholar]
- Rahmani M., Komijani H., Ghanbari A., Ettefagh M.M. Optimal novel super-twisting PID sliding mode control of a MEMS gyroscope based on multi-objective bat algorithm. Microsyst. Technol. 2018;24:2835–2846. [Google Scholar]
- Rajabioun R. Cuckoo optimization algorithm. Appl. Soft Comput. 2011;11:5508–5518. [Google Scholar]
- Rajakumar R., Amudhavel J., Dhavachelvan P., Vengattaraman T. Gwo-lpwsn: grey wolf optimization algorithm for node localization problem in wireless sensor networks. J. Comput. Netw. Commun. 2017;2017 [Google Scholar]
- Rajesh R.J., Ananda C.M. PSO tuned PID controller for controlling camera position in UAV using 2-axis gimbal. 2015 International Conference on Power and Advanced Control Engineering; ICPACE; IEEE; 2015. pp. 128–133. [Google Scholar]
- Rajinikanth V., Latha K. Applied Computational Intelligence and Soft Computing. 2012. I-PD controller tuning for unstable system using bacterial foraging algorithm: a study based on various error criterion. [Google Scholar]
- Rajinikanth V., Satapathy S.C. Design of controller for automatic voltage regulator using teaching learning based optimization. Proc. Technol. 2015;21:295–302. [Google Scholar]
- Rakovic S., Teel A., Mayne D., Astolfi A. Proceedings of the 45th IEEE Conference on Decision and Control. IEEE; 2006. Simple robust control invariant tubes for some classes of nonlinear discrete time systems; pp. 6397–6402. [Google Scholar]
- Ramachandran R., Madasamy B., Veerasamy V., Saravanan L. Load frequency control of a dynamic interconnected power system using generalised Hopfield neural network based self-adaptive PID controller. IET Gener. Transm. Distrib. 2018;12:5713–5722. [Google Scholar]
- Ramaswamy R., Sbalzarini I.F. A partial-propensity variant of the composition-rejection stochastic simulation algorithm for chemical reaction networks. J. Chem. Phys. 2010;132 doi: 10.1063/1.3297948. [DOI] [PubMed] [Google Scholar]
- Ramos-Figueroa O., Quiroz-Castellanos M., Mezura-Montes E., Schütze O. Metaheuristics to solve grouping problems: a review and a case study. Swarm Evol. Comput. 2020;53 [Google Scholar]
- Rani B.S., Kumar C.A. Multi-Objective Swarm Intelligence. Springer; 2015. A comprehensive review on bacteria foraging optimization technique; pp. 1–25. [Google Scholar]
- Rao D.C., Kabat M.R., Das P.K., Jena P.K. Cooperative navigation planning of multiple mobile robots using improved krill herd. Arab. J. Sci. Eng. 2018;43:7869–7891. [Google Scholar]
- Rao R. Jaya: a simple and new optimization algorithm for solving constrained and unconstrained optimization problems. Int. J. Ind. Eng. Comput. 2016;7:19–34. [Google Scholar]
- Rao R., Patel V. A multi-objective improved teaching-learning based optimization algorithm for unconstrained and constrained optimization problems. Int. J. Ind. Eng. Comput. 2014;5:1–22. [Google Scholar]
- Rao R.V., Kalyankar V. Parameter optimization of modern machining processes using teaching–learning-based optimization algorithm. Eng. Appl. Artif. Intell. 2013;26:524–531. [Google Scholar]
- Rao R.V., Savsani V.J., Vakharia D. Teaching–learning-based optimization: a novel method for constrained mechanical design optimization problems. Comput. Aided Des. 2011;43:303–315. [Google Scholar]
- Rao R.V., Savsani V.J., Vakharia D. Teaching–learning-based optimization: an optimization method for continuous non-linear large scale problems. Inf. Sci. 2012;183:1–15. [Google Scholar]
- Rashedi E., Nezamabadi-Pour H., Saryazdi S. GSA: a gravitational search algorithm. Inf. Sci. 2009;179:2232–2248. [Google Scholar]
- Razmjooy N., Khalilpour M., Ramezani M. A new meta-heuristic optimization algorithm inspired by FIFA world cup competitions: theory and its application in PID designing for AVR system. J. Control Autom. Electr. Syst. 2016;27:419–440. [Google Scholar]
- Regad M., Helaimi M., Taleb R., Othman A.M., Gabbar H.A. Frequency control of microgrid with renewable generation using PID controller based krill herd. Indones. J. Electr. Eng. Inform. 2020;8:21–32. [Google Scholar]
- Reis V., Santos M., Carmo M., Ferreira F. Control of level systems by Arduino via PC platform. 2016 20th International Conference on System Theory, Control and Computing; ICSTCC; IEEE; 2016. pp. 251–256. [Google Scholar]
- Ribeiro J., Santos M., Carmo M., Silva M. Comparison of PID controller tuning methods: analytical/classical techniques versus optimization algorithms. 2017 18th International Carpathian Control Conference; ICCC; IEEE; 2017. pp. 533–538. [Google Scholar]
- Rodríguez-Molina A., Mezura-Montes E., Villarreal-Cervantes M.G., Aldape-Pérez M. Multi-objective meta-heuristic optimization in intelligent control: a survey on the controller tuning problem. Appl. Soft Comput. 2020 [Google Scholar]
- Ruano A.E., Ge S.S., Guerra T.M., Lewis F.L., Principe J.C., Colnarič M. Computational intelligence in control. Annu. Rev. Control. 2014;38:233–242. [Google Scholar]
- Rubinstein R.Y. Optimization of computer simulation models with rare events. Eur. J. Oper. Res. 1997;99:89–112. [Google Scholar]
- Saad M.S., Jamaluddin H., Darus I.Z. PID controller tuning using evolutionary algorithms. WSEAS Trans. Syst. Control. 2012;7:139–149. [Google Scholar]
- Saha A., Saikia L.C. Utilisation of ultra-capacitor in load frequency control under restructured STPP-thermal power systems using WOA optimised PIDN-FOPD controller. IET Gener. Transm. Distrib. 2017;11:3318–3331. [Google Scholar]
- Sahu B.K., Pati S., Mohanty P.K., Panda S. Teaching–learning based optimization algorithm based fuzzy-PID controller for automatic generation control of multi-area power system. Appl. Soft Comput. 2015;27:240–249. [Google Scholar]
- Sahu R.K., Panda S., Rout U.K., Sahoo D.K. Teaching learning based optimization algorithm for automatic generation control of power system using 2-DOF PID controller. Int. J. Electr. Power Energy Syst. 2016;77:287–301. [Google Scholar]
- Sala R., Müller R. Benchmarking for metaheuristic black-box optimization: perspectives and open challenges. 2020. arXiv:2007.00541 arXiv preprint.
- Salmani M.H., Eshghi K. A smart structural algorithm (SSA) based on infeasible region to solve mixed integer problems. Int. J. Appl. Metaheuristic Comput. 2017;8:24–44. [Google Scholar]
- Sandoval D., Soto I., Adasme P. Control of direct current motor using ant colony optimization. 2015 CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies; CHILECON; IEEE; 2015. pp. 79–82. [Google Scholar]
- dos Santos Coelho L. Tuning of PID controller for an automatic regulator voltage system using chaotic optimization approach. Chaos Solitons Fractals. 2009;39:1504–1514. [Google Scholar]
- dos Santos Coelho L., da Costa Silveira C. 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control. IEEE; 2006. Improved bacterial foraging strategy for controller optimization applied to robotic manipulator system; pp. 1276–1281. [Google Scholar]
- dos Santos Coelho L., Mariani V.C. Firefly algorithm approach based on chaotic Tinkerbell map applied to multivariable PID controller tuning. Comput. Math. Appl. 2012;64:2371–2382. [Google Scholar]
- Şen M.A., Kalyoncu M. Optimal tuning of PID controller using grey wolf optimizer algorithm for quadruped robot. Balkan J. Electr. Comput. Eng. 2018;6:29–35. [Google Scholar]
- Sen R., Pati C., Dutta S., Sen R. Comparison between three tuning methods of PID control for high precision positioning stage. Mapan. 2015;30:65–70. [Google Scholar]
- Senberber H., Bagis A. 2017 Electronics. IEEE; 2017. Fractional PID controller design for fractional order systems using ABC algorithm; pp. 1–7. [Google Scholar]
- Shah-Hosseini H. Intelligent water drops algorithm: a new optimization method for solving the multiple knapsack problem. Int. J. Intell. Comput. Cybern. 2008;1:193–212. [Google Scholar]
- Shah-Hosseini H. Principal components analysis by the galaxy-based search algorithm: a novel metaheuristic for continuous optimisation. Int. J. Comput. Sci. Eng. 2011;6:132–140. [Google Scholar]
- Shaheen A.M., Spea S.R., Farrag S.M., Abido M.A. A review of meta-heuristic algorithms for reactive power planning problem. Ain Shams Eng. J. 2018;9:215–231. [Google Scholar]
- Shahrokhi M., Zomorrodi A. Comparison of PID controller tuning methods. 2012.
- Shahrokhi M., Zomorrodi A. Department of Chemical & Petroleum Engineering Sharif University of Technology; 2013. Comparison of PID Controller Tuning Methods; pp. 1–2. [Google Scholar]
- Shair E.F., Khor S., Abdullah A., Jaafar H., Saharuddin N., Abidin A.Z. Cuckoo search approach for cutting stock problem. Int. J. Inform. Electr. Eng. 2015;5:138. [Google Scholar]
- Sharma P., Gupta A., Aggarwal A., Gupta D., Khanna A., Hassanien A.E., de Albuquerque V.H.C. The health of things for classification of protein structure using improved grey wolf optimization. J. Supercomput. 2020;76:1226–1241. [Google Scholar]
- Sharma P., Sundaram S., Sharma M., Sharma A., Gupta D. Diagnosis of Parkinson's disease using modified grey wolf optimization. Cogn. Syst. Res. 2019;54:100–115. [Google Scholar]
- Shatnawi M., Bayoumi E. Brushless DC motor controller optimization using simulated annealing. 2019 International Conference on Electrical Drives & Power Electronics; EDPE; IEEE; 2019. pp. 292–297. [Google Scholar]
- Shatnawi Y., Quwaider M. Congestion control in ATM networks using PID controller with immune algorithm. 2019 10th International Conference on Information and Communication Systems; ICICS; IEEE; 2019. pp. 19–24. [Google Scholar]
- Shayanfar H., Gharehchopogh F.S. Farmland fertility: a new metaheuristic algorithm for solving continuous optimization problems. Appl. Soft Comput. 2018;71:728–746. [Google Scholar]
- Shayanfar H.A., Shayeghi H., Younesi A. Optimal PID controller design using krill herd algorithm for frequency stabilizing in an isolated wind-diesel system. Proceedings on the International Conference on Artificial Intelligence; ICAI; The Steering Committee of the World Congress in Computer Science, Computer; 2015. p. 516. [Google Scholar]
- Shie F.S., Chen M.-Y., Liu Y.-S. Prediction of corporate financial distress: an application of the America banking industry. Neural Comput. Appl. 2012;21:1687–1696. [Google Scholar]
- Shilane D., Martikainen J., Dudoit S., Ovaska S.J. A general framework for statistical performance comparison of evolutionary computation algorithms. Inf. Sci. 2008;178:2870–2879. [Google Scholar]
- Sibalija T. Simulated Annealing: Introduction, Applications and Theory. 2018. Application of simulated annealing in process optimization: a review; pp. 1–14. [Google Scholar]
- Siddique N., Adeli H. Simulated annealing, its variants and engineering applications. Int. J. Artif. Intell. Tools. 2016;25 [Google Scholar]
- da Silva B.R., da Silva Oliveira L., de Alencar D.B., das Neves Nascimento E.R., Dinola I.C.S., Nascimento M.H.R. Analysis of robust PID control with pre-filter using the perfect itae performance criterion applied to the heavy-duty gas turbine fuel system. Int. J. Adv. Eng. Res. Sci. 2019;6 [Google Scholar]
- Simon D. Biogeography-based optimization. IEEE Trans. Evol. Comput. 2008;12:702–713. [Google Scholar]
- Şimşek E.C., Köse A., Şahin M., Irmak E. Optimization of PID parameters using ant colony algorithm for position control of DC motor. 2019 8th International Conference on Renewable Energy Research and Applications; ICRERA; IEEE; 2019. pp. 1047–1051. [Google Scholar]
- Singh K., Vasant P., Elamvazuthi I., Kannan R. PID tuning of servo motor using bat algorithm. Proc. Comput. Sci. 2015;60:1798–1808. [Google Scholar]
- Sivakumar R., Deepa P., Sankaran D. A study on BFO algorithm based PID controller design for MIMO process using various cost functions. Indian J. Sci. Technol. 2016;9:1–6. [Google Scholar]
- Skogestad S. Probably the best simple PID tuning rules in the world. AIChE Annual Meeting; Reno, Nevada; 2001. [Google Scholar]
- Solihin M.I., Akmeliawati R. International Conference on Robot Intelligence Technology and Applications. Springer; 2018. Robust feedback controller design using cuckoo search optimization to maximize stability radius; pp. 62–75. [Google Scholar]
- Song M.-P., Gu G.-C. Proceedings of 2004 International Conference on Machine Learning and Cybernetics (IEEE Cat. No. 04EX826) vol. 4. IEEE; 2004. Research on particle swarm optimization: a review; pp. 2236–2241. [Google Scholar]
- Soni Y.K., Bhatt R. BF-PSO optimized PID controller design using ISE, IAE, IATE and MSE error criteria. Int. J. Adv. Res. Comput. Eng. Technol. 2013;2:2333–2336. [Google Scholar]
- Sorensen E. In: Concepts of Chemical Engineering for Chemists. Stefaan S., editor. Royal Society of Chemistry; 2007. An introduction to process control; pp. 253–276. [Google Scholar]
- Sreekanth P., Hari A. Genetic algorithm based self tuning regulator for ball and hoop system. 2016 Conference on Emerging Devices and Smart Systems; ICEDSS; IEEE; 2016. pp. 147–152. [Google Scholar]
- Srinivas P., Lakshmi K.V., Kumar V.N. A comparison of PID controller tuning methods for three tank level process. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2014;3:6810–6820. [Google Scholar]
- Štimac G., Braut S., Žigulić R. Comparative analysis of PSO algorithms for PID controller tuning. Chin. J. Mech. Eng. 2014;27:928–936. [Google Scholar]
- Stojanović I., Brajević I., Stanimirović P.S., Kazakovtsev L.A., Zdravev Z. Application of heuristic and metaheuristic algorithms in solving constrained Weber problem with feasible region bounded by arcs. Math. Probl. Eng. 2017 [Google Scholar]
- Storn R., Price K. Differential evolution – a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997;11:341–359. [Google Scholar]
- Sule A.H., Mokhtar A.S., Jamian J.J.B., Khidrani A., Larik R.M. Optimal tuning of proportional integral controller for fixed-speed wind turbine using grey wolf optimizer. Int. J. Electr. Comput. Eng. 2020;10:5251–5261. [Google Scholar]
- Suman B., Hoda N., Jha S. Orthogonal simulated annealing for multiobjective optimization. Comput. Chem. Eng. 2010;34:1618–1631. [Google Scholar]
- Suman B., Kumar P. A survey of simulated annealing as a tool for single and multiobjective optimization. J. Oper. Res. Soc. 2006;57:1143–1160. [Google Scholar]
- Sundareswaran K., Nayak P.S. Ant colony based feedback controller design for soft-starter fed induction motor drive. Appl. Soft Comput. 2012;12:1566–1573. [Google Scholar]
- Sweidan A.H., El-Bendary N., Hassanien A.E., Hegazy O.M., Mohamed A.-K. Grey wolf optimizer and case-based reasoning model for water quality assessment. The 1st International Conference on Advanced Intelligent System and Informatics; AISI2015, Beni Suef, Egypt, November 28–30, 2015; Springer; 2016. pp. 229–239. [Google Scholar]
- Taillard É.D., Voss S. Essays and Surveys in Metaheuristics. Springer; 2002. POPMUSIC – partial optimization metaheuristic under special intensification conditions; pp. 613–629. [Google Scholar]
- Talbi E.-G. vol. 74. John Wiley & Sons; 2009. Metaheuristics: from Design to Implementation. [Google Scholar]
- Talbi E.-G. Machine learning into metaheuristics: a survey and taxonomy of data-driven metaheuristics. 2020.
- Tamura K., Yasuda K. Primary study of spiral dynamics inspired optimization. IEEJ Trans. Electr. Electron. Eng. 2011;6:S98–S100. [Google Scholar]
- Tan W., Marquez H.J., Chen T. Performance assessment of PID controllers. Control Intell. Syst. 2004;32:158–166. [Google Scholar]
- Tan W., Yuan Y., Niu Y. Proceedings of the 1999 IEEE International Conference on Control Applications (Cat. No. 99CH36328) vol. 1. IEEE; 1999. Tuning of PID controller for unstable process; pp. 121–124. [Google Scholar]
- Tan Y., Zhu Y. International Conference in Swarm Intelligence. Springer; 2010. Fireworks algorithm for optimization; pp. 355–364. [Google Scholar]
- Tang W., Wu Q. Biologically inspired optimization: a review. Trans. Inst. Meas. Control. 2009;31:495–515. [Google Scholar]
- Tavares R.S., Sato A.K., Martins T.C., Lima R.G., Tsuzuki M.S.G. GPU acceleration of absolute EIT image reconstruction using simulated annealing. Biomed. Signal Process. Control. 2019;52:445–455. [Google Scholar]
- Tikhamarine Y., Souag-Gamane D., Ahmed A.N., Kisi O., El-Shafie A. Improving artificial intelligence models accuracy for monthly streamflow forecasting using grey wolf optimization (GWO) algorithm. J. Hydrol. 2020;582 [Google Scholar]
- Valluru S.K., Singh M. Investigation of NARMA L-2 and artificial bee colony tuned PID controllers for bench scaled nonlinear dynamical system. Int. J. Control Theory Appl. 2017;10:363–374. [Google Scholar]
- Varty Z. Simulated annealing overview. 2017.
- Verma P., Patel N., Nair N.-K.C., Sikander A. Design of PID controller using cuckoo search algorithm for buck-boost converter of led driver circuit. 2016 IEEE 2nd Annual Southern Power Electronics Conference; SPEC; IEEE; 2016. pp. 1–4. [Google Scholar]
- Verma S.K., Nagar S.K. Design and optimization of fractional order PIλ Dμ controller using grey wolf optimizer for automatic voltage regulator system. Recent Adv. Electr. Electron. Eng. 2018;11:217–226. [Google Scholar]
- Vijay D., Banu U.S. PID controller tuned using simulated annealing for assured crew re-entry vehicle with PWPF thruster firing. 2016 Online International Conference on Green Engineering and Technologies; IC-GET; IEEE; 2016. pp. 1–6. [Google Scholar]
- Villarreal-Cervantes M.G., Alvarez-Gallegos J. Off-line PID control tuning for a planar parallel robot using DE variants. Expert Syst. Appl. 2016;64:444–454. [Google Scholar]
- Wang C., Cheng H.Z. Optimization of network configuration in large distribution systems using plant growth simulation algorithm. IEEE Trans. Power Syst. 2008;23:119–126. [Google Scholar]
- Wang G.-G., Deb S., Coelho L.d.S. Elephant herding optimization. 2015 3rd International Symposium on Computational and Business Intelligence; ISCBI; IEEE; 2015. pp. 1–5. [Google Scholar]
- Wang G.-G., Gandomi A.H., Alavi A.H., Gong D. A comprehensive review of krill herd algorithm: variants, hybrids and applications. Artif. Intell. Rev. 2019;51:119–148. [Google Scholar]
- Wang J.-J. Simulation studies of inverted pendulum based on PID controllers. Simul. Model. Pract. Theory. 2011;19:440–449. [Google Scholar]
- Wang Q., Spronck P., Tracht R. Proceedings of the 2003 International Conference on Machine Learning and Cybernetics (IEEE Cat. No. 03EX693) vol. 3. 2003. An overview of genetic algorithms applied to control engineering problems; pp. 1651–1656. (IEEE). [Google Scholar]
- Wang Q.-G., Hang C.-C., Bi Q. A technique for frequency response identification from relay feedback. IEEE Trans. Control Syst. Technol. 1999;7:122–128. [Google Scholar]
- Wolpert D.H., Macready W.G., et al. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997;1:67–82. [Google Scholar]
- Wong D., Leong H.W., Liu H. vol. 42. Springer Science & Business Media; 2012. Simulated Annealing for VLSI Design. [Google Scholar]
- Wu H., Xu D., Yang M., Zhang X. Surface structure of hydroxyapatite from simulated annealing molecular dynamics simulations. Langmuir. 2016;32:4643–4652. doi: 10.1021/acs.langmuir.5b04667. [DOI] [PubMed] [Google Scholar]
- Wu X., Zhou Y., Lu Y. Elite opposition-based water wave optimization algorithm for global optimization. Math. Probl. Eng. 2017;2017 [Google Scholar]
- Wu Z., Zhao X., Ma Y., Zhao X. A hybrid model based on modified multi-objective cuckoo search algorithm for short-term load forecasting. Appl. Energy. 2019;237:896–909. [Google Scholar]
- Xia S., Li L. Application of greenhouse temperature prediction based on pso-rbf neural network. Comput. Eng. Des. 2017;38:744–748. [Google Scholar]
- Xu Y., Fan P., Yuan L. A simple and efficient artificial bee colony algorithm. Math. Probl. Eng. 2013 [Google Scholar]
- Yachen Z., Yueming H. 2008 27th Chinese Control Conference. IEEE; 2008. On PID controllers based on simulated annealing algorithm; pp. 225–228. [Google Scholar]
- Yadav S., Nagar S.K., Mishra A. Tuning of parameters of PID controller using grey wolf optimizer. 2020. Available at SSRN 3575432.
- Yadav S., Verma S.K., Nagar S.K. Optimized PID controller for magnetic levitation system. IFAC-PapersOnLine. 2016;49:778–782. [Google Scholar]
- Yadav S., Verma S.K., Nagar S.K. Performance enhancement of magnetic levitation system using teaching learning based optimization. Alex. Eng. J. 2018;57:2427–2433. [Google Scholar]
- Yaghoobi S., Mojallali H. Tuning of a PID controller using improved chaotic krill herd algorithm. Optik. 2016;127:4803–4807. [Google Scholar]
- Yang B., Wang J., Zhang X., Yu T., Yao W., Shu H., Zeng F., Sun L. Comprehensive overview of meta-heuristic algorithm applications on PV cell parameter identification. Energy Convers. Manag. 2020;208 [Google Scholar]
- Yang X.-S. International Symposium on Stochastic Algorithms. Springer; 2009. Firefly algorithms for multimodal optimization; pp. 169–178. [Google Scholar]
- Yang X.-S. A new metaheuristic bat-inspired algorithm. Nature Inspired Cooperative Strategies for Optimization; NICSO 2010; Springer; 2010. pp. 65–74. [Google Scholar]
- Yang X.-S. International Symposium on Experimental Algorithms. Springer; 2011. Metaheuristic optimization: algorithm analysis and open problems; pp. 21–32. [Google Scholar]
- Yang X.-S. Bat algorithm for multi-objective optimisation. 2012. arXiv:1203.6571 arXiv preprint.
- Yang X.-S. International Conference on Unconventional Computing and Natural Computation. Springer; 2012. Flower pollination algorithm for global optimization; pp. 240–249. [Google Scholar]
- Yang X.-S., Deb S. Cuckoo search via Lévy flights. 2009 World Congress on Nature & Biologically Inspired Computing; NaBIC; IEEE; 2009. pp. 210–214. [Google Scholar]
- Yang X.-S., Deb S. Engineering optimisation by cuckoo search. 2010. arXiv:1005.2908 arXiv preprint.
- Yang X.-S., Gandomi A.H. Bat algorithm: a novel approach for global engineering optimization. Eng. Comput. 2012 [Google Scholar]
- Yapici H., Cetinkaya N. A new meta-heuristic optimizer: pathfinder algorithm. Appl. Soft Comput. 2019;78:545–568. [Google Scholar]
- Yıldız B.S., Yıldız A.R. Comparison of grey wolf, whale, water cycle, ant lion and sine-cosine algorithms for the optimization of a vehicle engine connecting rod. Mater. Test. 2018;60:311–315. [Google Scholar]
- Younesi A., Tohidi S. Design of a sensorless controller for pmsm using krill herd algorithm. The 6th Power Electronics, Drive Systems & Technologies Conference; PEDSTC2015; IEEE; 2015. pp. 418–423. [Google Scholar]
- Yu H., Chen Y., Hassan S.G., Li D. Prediction of the temperature in a Chinese solar greenhouse based on LSSVM optimized by improved PSO. Comput. Electron. Agric. 2016;122:94–102. [Google Scholar]
- Yu K., Wang X., Wang Z. Constrained optimization based on improved teaching–learning-based optimization algorithm. Inf. Sci. 2016;352:61–78. [Google Scholar]
- Yunus A.S., Djalal M.R. 2019 International Conference on Technologies and Policies in Electric Power & Energy. IEEE; 2019. Optimal tuning of PID control on single machine infinite bus using ant colony optimization; pp. 1–6. [Google Scholar]
- Zhang Y., Wang S., Ji G. A comprehensive survey on particle swarm optimization algorithm and its applications. Math. Probl. Eng. 2015 [Google Scholar]
- Zheng Y.-J. Water wave optimization: a new nature-inspired metaheuristic. Comput. Oper. Res. 2015;55:1–11. [Google Scholar]
- Zhi D. Optimization of PID controller for single phase inverter based on ABC. 2019 5th International Conference on Control, Automation and Robotics; ICCAR; IEEE; 2019. pp. 501–504. [Google Scholar]
- Zhong S., Dong Y.-F., Sarosh A. Foundations and Practical Applications of Cognitive Systems and Information Processing. Springer; 2014. Artificial bee colony algorithm for parametric optimization of spacecraft attitude tracking controller; pp. 501–510. [Google Scholar]
- Zhuang M., Atherton D. IEE Proceedings D (Control Theory and Applications) vol. 140. IET; 1993. Automatic tuning of optimum PID controllers; pp. 216–224. [Google Scholar]
- Ziegler J., Nichols N. Optimum settings for automatic controllers. 1993.
- Ziegler J.G., Nichols N.B. Optimum settings for automatic controllers. Trans. Am. Soc. Mech. Eng. 1942;64 [Google Scholar]
- Zulu A., John S. A review of control algorithms for autonomous quadrotors. Open J. Appl. Sci. 2014;4:547–556. [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.
Data Availability Statement
No data was used for the research described in the article.