

Abstract
For many machine learning tasks, deep learning greatly outperforms all other existing learning algorithms. However, constructing a deep learning model on a big data set often takes days or months. During this long process, it is preferable to provide a progress indicator that keeps predicting the model construction time left and the percentage of model construction work done. Recently, we developed the first method to do this that permits early stopping. That method revises its predicted model construction cost using information gathered at the validation points, where the model’s error rate is computed on the validation set. Due to the sparsity of validation points, the resulting progress indicators often have a long delay in gathering information from enough validation points and obtaining relatively accurate progress estimates. In this paper, we propose a new progress indication method to overcome this shortcoming by judiciously inserting extra validation points between the original validation points. We implemented this new method in TensorFlow. Our experiments show that compared with using our prior method, using this new method reduces the progress indicator’s prediction error of the model construction time left by 57.5% on average. Also, with a low overhead, this new method enables us to obtain relatively accurate progress estimates faster.
Keywords: Progress indicator, deep learning, TensorFlow, model construction
I. INTRODUCTION
A. OUR PRIOR PROGRESS INDICATION METHOD FOR CONSTRUCTING DEEP LEARNING MODELS
For many machine learning tasks such as image segmentation, machine translation, video classification, and speech recognition, deep learning greatly outperforms all other existing learning algorithms [1]. However, even with a cluster of graphics processing unit (GPU) or tensor processing unit (TPU) nodes, it often takes days or months to construct a deep learning model on a big data set [2]–[5]. During this long process, it is preferable to provide a progress indicator that keeps predicting the model construction time left and the percentage of model construction work done as shown in Fig. 1. This improves the user-friendliness of model construction. Also, the information supplied by the progress indicator can be used to aid workload management [6]–[8].
FIGURE 1.
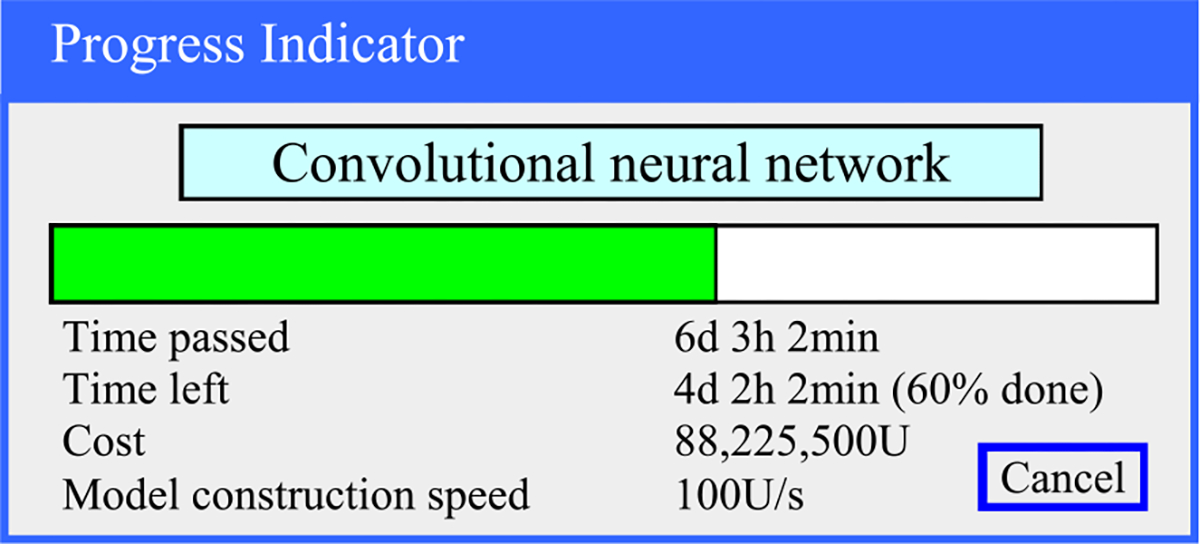
An example progress indicator for constructing deep learning models.
Recently, we developed the first method to build sophisticated progress indicators for constructing deep learning models that permits early stopping [8]. This method computes progress estimates for the model construction process using information gathered at the validation points, where the model’s error rate is computed on the validation set. Despite producing useful results, this method has a shortcoming. Due to the sparsity of validation points, the resulting progress indicators often have a long delay in obtaining relatively accurate progress estimates. More specifically, at the beginning of model construction, we come up with a crude estimate of the model construction cost that is usually inaccurate. At least three data points are needed to estimate the three parameters of the regression function that is used to predict the model construction cost. Consequently, the predicted model construction cost is revised starting from the third validation point, which is too late. Then a revision is made only at each subsequent validation point, which is infrequent. The combination of these two factors often causes a long delay in gathering information from enough validation points and obtaining relatively accurate progress estimates.
For example, Goyal et al. [9] used eight Nvidia Tesla P100 GPUs to train the ResNet-50 convolutional neural network on the ImageNet Large-Scale Visual Recognition Competition (ILSVRC) data set [10]. About 19 minutes passed between two successive validation points [9], [11]. By the time the progress indicator revised its predicted model construction cost for the first time, 3 × 19 = 57 minutes had elapsed. This is a long delay that takes up a non-trivial fraction of the 29-hour model construction time [9].
B. OUR CONTRIBUTIONS
The objective of this research work is to overcome our prior progress indication method’s [8] shortcoming of having a long delay in obtaining relatively accurate progress estimates for the deep learning model construction process. To obtain relatively accurate progress estimates faster, in this paper we propose a new progress indication method for constructing deep learning models that judiciously inserts extra validation points between the original validation points. The predicted model construction cost is revised at both the original and the added validation points. Consequently, compared with our prior progress indication method [8], our new progress indication method starts revising the predicted model construction cost earlier and revises the predicted model construction cost more frequently. This helps the progress indicator reduce its prediction error of the model construction time left and obtain relatively accurate progress estimates faster.
A good progress indicator should have a low run-time overhead [6]. In our case, a large part of the progress indicator’s run-time overhead comes from computing the model’s error rate at the added validation points. To lower this part of the run-time overhead, at each added validation point, we calculate the model’s error rate on a randomly sampled subset of the full validation set rather than on the full validation set.
To fill in the rest of our new progress indication method, we need to solve three technical challenges. First, we need to set 1) nj (j ≥ 0), the count of validation points to be added between the j-th and the (j + 1)-th original validation points, and 2) V′, the uniform size of the randomly sampled subset of the full validation set that will be used at each added validation point. Through theoretical reasoning, we show that nj should decrease as j increases. For this purpose, exponential decay works better than linear decay. V′ is chosen to control the total overhead of computing the model’s error rate at the validation points added before the first original validation point, while keeping the randomly sampled subset of the full validation set large enough for reasonably estimating the model’s generalization error at each added validation point.
Second, the validation error is the model’s error rate calculated on the actual validation set used at a validation point. As in our prior paper [8], we use the validation curve to predict when early stopping will occur. As shown in Fig. 2, this curve shows the validation errors obtained over time, is non-smooth, and can be regarded as the sum of some zero-mean random noise and a smooth trend curve. The random noise’s variance depends on the size of the actual validation set used at the validation point. The relationship between these two numbers is previously unknown and difficult to be derived directly. However, we need to know this relationship in order to use both the original and the added validation points to predict when early stopping will occur. Noting that the random noise’s variance is equal to the validation error’s variance, we use an indirect approach to derive this relationship. We first compute the conditional mean and the conditional variance of the validation error given the model’s generalization error [12], both of which can be expressed using the model’s generalization error and the size of the actual validation set used at the validation point. Then we use the conditional mean, the conditional variance, and the law of total variance [13] to compute the validation error’s variance, which is expressed using the mean and the variance of the model’s generalization error and the size of the actual validation set used at the validation point.
FIGURE 2.
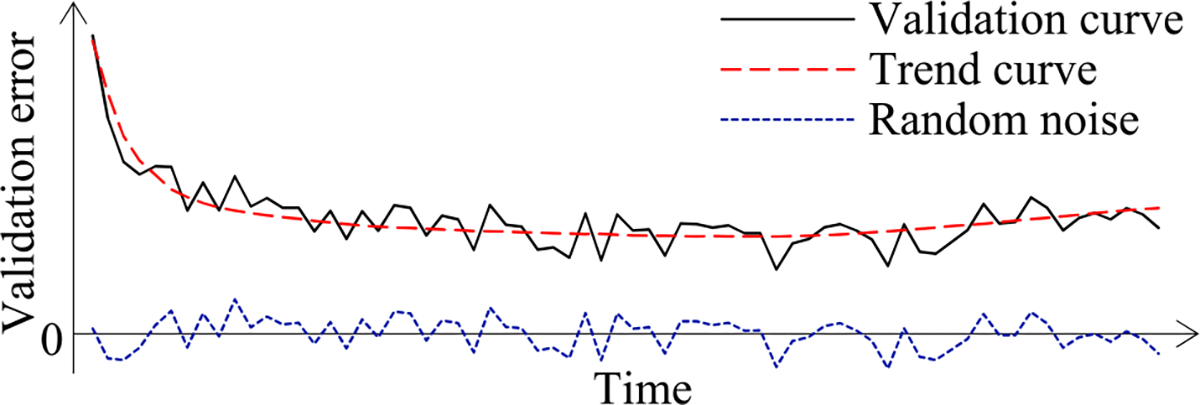
The validation curve = some random noise + a trend curve.
Third, using the above-mentioned relationship and maximum likelihood estimation [13], we estimate the trend curve and the variance of the random noise. To the best of our knowledge, this is the first time that maximum likelihood estimation is employed for progress indication. The likelihood function is the product of multiple integrals, which are difficult to be used directly for numerical optimization. To overcome this hurdle, for each integral, we use the probability density function of a normal distribution to approximate a key component of the integrand. In this way, we acquire a simplified form of the likelihood function, which is easy to use for numerical optimization.
We implemented our new progress indication method in TensorFlow [14], an open-source software package for deep learning. We present our performance test results for recurrent and convolutional neural networks. Our results show that compared with using our prior method, using this new method reduces the progress indicator’s prediction error of the model construction time left by 57.5% on average. Also, with a low overhead, this new method enables us to obtain relatively accurate progress estimates faster.
C. ORGANIZATION OF THE PAPER
The remaining sections of this paper are organized in the following way. Section II reviews our prior progress indication method for constructing deep learning models. Section III describes our new progress indication method for constructing deep learning models. Section IV shows performance test results by implementing our new method in TensorFlow. Section V presents the related work. Section VI points out some directions for future work. Section VII gives the conclusion.
II. REVIEW OF OUR PRIOR PROGRESS INDICATION METHOD FOR CONSTRUCTING DEEP LEARNING MODELS
In this section, we first introduce some notations and concepts that will be used in the rest of the paper. Then we outline our prior progress indication method for constructing deep learning models. Finally, we compare our prior and our new progress indication methods.
A. SOME NOTATIONS AND CONCEPTS
To control model construction, the user of the deep learning software specifies an early stopping condition and three positive integers B, g, and me. During model construction, we process all the training instances for one or more rounds, also known as epochs. The deep learning model is constructed in batches, each processing B training instances to calculate parameter value updates to the model. We reach an original validation point after finishing every g batches of model construction. There, we first calculate the validation error, which is the model’s error rate on the full validation set. Then we assess whether the early stopping condition is fulfilled. If so, we end model construction. me denotes the largest number of epochs permitted to train the model. If the early stopping condition remains unfulfilled by the time we finish the me-th epoch, we end model construction at that time. Thus, the largest number of batches permitted to train the model is
The largest number of original validation points permitted to train the model is
where ⌊ ⌋ is the floor function, e.g., ⌊4.4⌋ = 4.
As in our prior work [8], the goal of this work is not to deal with every early stopping condition that exists. Instead, we focus on a commonly used early stopping condition [1], [15] adopted in our prior work [8]. Through a case study on the condition, we demonstrate that when early stopping is permitted in constructing a deep learning model, it is feasible to obtain relatively accurate progress estimates faster by judiciously inserting extra validation points between the original validation points. The early stopping condition uses two pre-determined numbers: patience p > 0 and min_delta δ ≥ 0. The condition is fulfilled when the validation error drops by < δ for p original validation points in a row. In other words, letting denote the validation error of the model at the j-th original validation point, we end model construction at the k-th original validation point when is < δ for each i between k − p + 1 and k.
B. OUTLINE OF OUR PRIOR PROGRESS INDICATION METHOD FOR CONSTRUCTING DEEP LEARNING MODELS
In this section, we outline our prior progress indication method. We begin with a crude estimate of the model construction cost. The estimated model construction cost is measured by the unit of work U. Every U is the mean quantity of work taken to process a training instance once in model construction, by going once forward and once backwards over the neural network. During model construction, we keep collecting statistics and using them to refine the estimated model construction cost. We keep monitoring the present model construction speed, which is calculated as the number of Us done per second in the past 10 seconds. The model construction time left is predicted to be the estimated model construction cost left divided by the present model construction speed. Every few seconds, the progress indicator is updated with the most recent information. As we keep collecting more precise information of the model construction task as it runs, our progress estimates are inclined to become more and more accurate.
1). CALCULATING THE MODEL CONSTRUCTION COST
The model construction cost is predominated by and is approximately the sum of the cost to process the training instances and the cost to calculate the validation errors. The cost to process the training instances is
| (1) |
Let V denote the count of data instances that are in the full validation set. Every data instance in the full validation set is called a validation instance. Our prior work [8] shows that the mean quantity of work taken to process a validation instance one time to calculate the validation error is 1/3 unit of work. The cost to calculate the validation errors is
| (2) |
Let nv denote the count of original validation points required to train the model. Recall that vmax denotes the largest number of original validation points permitted to train the model. g denotes the count of batches of model construction between two successive original validation points. If nv is < vmax, early stopping will occur before we reach the vmax-th original validation point. In this case, the count of batches required to train the model is = nv × g. If nv is = vmax, early stopping will never occur. In this case, the count of batches required to train the model is = bmax, the largest number of batches permitted to train the model. In formulas (1) and (2), B, g, and V are known before model construction starts. Hence, to predict the model construction cost, we mainly need to project nv.
2). ESTIMATING THE COUNT OF ORIGINAL VALIDATION POINTS REQUIRED TO TRAIN THE MODEL
When model construction starts, we project nv, the count of original validation points required to train the model, to be vmax, the largest number of original validation points permitted to train the model. After model construction starts, we use the validation curve to revise the estimated nv. We deem the validation curve to be the sum of some zero-mean random noise and a smooth trend curve (see Fig. 2). We use an inverse power function
as the regression function to estimate the trend curve. Here, a is >0, b is >0, c is >0, and j is the original validation point’s sequence number. Since at least three data points are needed to estimate the three parameters a, b, and c, we do not refine the estimated nv before reaching the third original validation point. At each original validation point whose sequence number is ≥3 and at which the early stopping condition is unfulfilled, we re-estimate nv by fitting the regression function to the validation curve obtained so far, using recorded data to estimate the variance of the random noise, using the fitted regression function to estimate the trend curve for future original validation points, and then performing Monte Carlo simulation to project nv. During the Monte Carlo simulation, we create multiple synthetic validation curves through adding to the estimated trend curve simulated random noise. We apply the early stopping condition to every synthetic validation curve to obtain a separate simulated count of original validation points required to train the model. No simulated number can be > vmax. Then we compute a revised estimate of nv based upon the estimated mode of these simulated numbers.
C. COMPARING OUR PRIOR AND OUR NEW PROGRESS INDICATION METHODS
Tables 1 and 2 show the differences and the commonalities between our prior and our new progress indication methods for constructing deep learning models, respectively.
TABLE 1.
The differences between our prior and our new progress indication methods.
| Criterion | Our prior progress indication method | Our new progress indication method |
|---|---|---|
| Whether extra validation points are inserted between the original validation points (section III-B) | No | Yes |
| Whether at each validation point, the actual validation set used has the same count of data instances (section III-C) | Yes | No |
| Whether the relationship between the random noise’s variance and the size of the actual validation set used at the validation point is used (section III-D) | No | Yes |
| Whether maximum likelihood estimation is used to estimate the trend curve and the variance of the random noise (section III-E) | No | Yes |
| The minimum number of validation points required to employ the validation curve to re-estimate the count of original validation points required to train the model (section III-A) | 3 | 4 |
TABLE 2.
The commonalities between our prior and our new progress indication methods.
| Commonality |
|---|
| The validation curve is regarded as the sum of some zero-mean random noise and a smooth trend curve |
| An inverse power function is used to estimate the trend curve |
| The approach to conduct Monte Carlo simulation to estimate the count of original validation points required to train the model |
| The approach to monitor the present model construction speed |
| The approach to estimate the model construction time left based upon the projected model construction cost left and the present model construction speed |
III. OUR NEW PROGRESS INDICATION METHOD FOR CONSTRUCTING DEEP LEARNING MODELS
In this section, we present our new progress indication method for constructing deep learning models. Our presentation focuses on using deep learning for classification and the steps related to estimating the trend curve, the variance of the random noise, and the model construction cost based upon the predicted count of original validation points required to train the model. The approaches to conduct Monte Carlo simulation to estimate the count of original validation points required to train the model, to monitor the present model construction speed, and to estimate the model construction time left based upon the projected model construction cost left and the present model construction speed are identical to those used in our prior progress indication method for constructing deep learning models [8] and are omitted.
This section is organized in the follow way. Section III-A provides an overview of our new progress indication method for constructing deep learning models. Section III-B presents our approach to insert extra validation points between the original validation points. Section III-C shows how to set V′, the uniform size of the randomly sampled subset of the full validation set that will be used at each added validation point. Section III-D derives the relationship between the random noise’s variance and the size of the actual validation set used at the validation point. Section III-E shows how to estimate the trend curve and the variance of the random noise for future validation points. Section III-F describes how to determine Vmin, the minimum size needed for the randomly sampled subset of the full validation set used at an added validation point. Section III-G shows how to estimate the model construction cost based upon the predicted count of original validation points required to train the model.
In the rest of this paper, whenever we mention validation points, we mean both original and added validation points, unless original validation points or added validation points are explicitly mentioned.
A. OVERVIEW OF THE NEW PROGRESS INDICATION METHOD
This section provides an overview of the new progress indication method for constructing deep learning models. To obtain relatively accurate progress estimates faster, we judiciously insert extra validation points between the original validation points. Using the validation errors obtained at both the original and the added validation points that we have encountered so far, we revise the predicted model construction cost at both the original and the added validation points. Consequently, compared with our prior progress indication method [8], our new progress indication method starts revising the predicted model construction cost earlier and revises the predicted model construction cost more frequently. This helps the progress indicator reduce its prediction error of the model construction time left and obtain relatively accurate progress estimates faster.
Our prior progress indication method [8] roughly approximates the model construction cost as the sum of two components: the cost to process the training instances and the cost to calculate the validation errors at the original validation points. In addition to these two components, our new progress indication method adds a third component to the model construction cost: the cost to calculate the validation errors at the added validation points. Our discussion of the model construction cost focuses on these three dominating components.
As in our prior work [8], to predict the model construction cost, we mainly need to predict nv, the count of original validation points required to train the model. When model construction starts, we estimate nv to be vmax, the largest number of original validation points permitted to train the model. We deem the validation curve to be the sum of some zero-mean random noise and a smooth trend curve. Our new progress indication method uses four parameters to estimate the trend curve and the variance of the random noise (see Section III–E). Since at least τv = 4 data points are needed to estimate the four parameters, we refine the estimated nv only when we reach a validation point whose sequence number is ≥ τv and where the early stopping condition is unfulfilled.
A good progress indicator should have a low run-time overhead [6]. In our new progress indication method, a large part of the progress indicator’s run-time overhead comes from computing the model’s error rate at the added validation points. To lower this part of the run-time overhead, at each added validation point, we calculate the model’s error rate on a randomly sampled subset of the full validation set rather than on the full validation set. The sampling is done without replacement. The subset is usually much smaller than the full validation set and could be biased. If we keep using the same biased subset at each added validation point, the bias could have a large negative impact on our estimation accuracy of the trend curve, the variance of the random noise, and subsequently the model construction cost. To address this issue, we re-sample the full validation set to obtain a new subset at each added validation point to calculate the model’s error rate. Each subset includes the same number V′ of data instances. At each original validation point, we use the full validation set to calculate the model’s error rate.
The random noise’s variance depends on the size of the actual validation set used at the validation point. We use an indirect approach to derive the relationship between these two numbers. Using this relationship, the validation curve obtained so far, and maximum likelihood estimation [13], we estimate the trend curve and the variance of the random noise for future validation points. We use the Monte Carlo simulation approach in our prior work [8] to predict nv, the count of original validation points required to train the model. Finally, we revise the predicted model construction cost based upon the projected nv.
B. OUR APPROACH TO INSERT EXTRA VALIDATION POINTS BETWEEN THE ORIGINAL VALIDATION POINTS
This section describes our approach to insert extra validation points between the original validation points. We regard the beginning of model construction as the 0-th original validation point, although the model’s error rate is not computed there. For each pair of successive original validation points, we insert extra validation points evenly between them. More specifically, recall that g denotes the count of batches of model construction between two successive original validation points. vmax denotes the largest number of original validation points permitted to train the model. nj (0 ≤ j ≤ vmax − 1) denotes the count of validation points to be added between the j-th and the (j + 1)-th original validation points. When j = 0, n0 denotes the count of validation points to be added before the first original validation point. We ensure that nj is ≤ g − 1 for every j between 0 and vmax − 1. Starting from the j-th original validation point, we do
batches of model construction to reach the k-th (1 ≤ k ≤ nj) of the nj validation points added between the j-th and the (j + 1)-th original validation points. Here, ⌊ ⌉ is the nearest integer function, e.g., ⌊4.4⌉ = 4 and ⌊4.6⌉ = 5.
The rest of this section is organized in the following way. Section III-B1 provides an overview of how we set nj (0 ≤ j ≤ vmax − 1), the count of validation points to be added between the j-th and the (j + 1)-th original validation points. Section III-B2 describes how to set n0, the count of validation points to be added before the first original validation point. Section III-B3 shows how to set q, the constant regulating the decay rate of nj (0 ≤ j ≤ vmax − 1) in the exponential decay schema.
1). OVERVIEW OF HOW WE SET nj (0 ≤ j ≤ vmax − 1)
This section provides an overview of how we set nj (0 ≤ j ≤ vmax − 1), the count of validation points to be added between the j-th and the (j + 1)-th original validation points.
Recall that nv denotes the count of original validation points required to train the model. Our initial estimate of nv is usually inaccurate and is not refined until we reach the fourth validation point. As we accumulate more data points over time, our estimate of nv tends to become more accurate. To refine our initial estimate of nv as soon as possible and to obtain relatively accurate estimates of nv faster, we insert more validation points for use at the early stages of model construction than at the later stages of model construction. In other words, we decrease nj (0 ≤ j ≤ vmax − 1), the count of validation points to be added between the j-th and the (j + 1)-th original validation points, as j increases. Furthermore, we want n0, the count of validation points to be added before the first original validation point, to be reasonably large. This is particularly the case when a sophisticated progress indicator is most needed: the training set is large, many batches of model construction are performed between two successive validation points, and model construction takes a long time.
One could decrease nj either linearly or exponentially as j increases. For our purpose, exponential decay works better than linear decay. To compare these two decay schemata of nj and show this, we consider two model construction processes that have the same setting except for the decay schema used. Recall that n0 denotes the count of validation points to be added before the first original validation point. vmax is the largest number of original validation points permitted to train the model. One model construction process uses the exponential decay schema, where
q (0 ≤ q < 1) is a constant regulating the decay rate of nj, and 00 is defined to be 1. The other model construction process uses the linear decay schema, where
and z is a constant >0 regulating the decay rate of nj. Given the same mean cost of calculating the validation error at each added validation point, the total cost of calculating the validation errors at all added validation points is ∝ the total count of validation points added between the original validation points. To have the same total cost of calculating the validation errors at all added validation points, in the two model construction processes we insert the same total number of validation points between the original validation points. For a sufficiently large vmax, the total count of validation points added between the original validation points is roughly
and
for the exponential decay schema and the linear decay schema, respectively. Recall that we want n0 to be reasonably large. Thus, we expect the n0 used in the linear decay schema to be typically >2z/(1 − q). In this case, the n0 used in the exponential decay schema is larger than the n0 used in the linear decay schema. Adopting a larger n0 makes the early stage of model construction include more added validation points, which is what we want. Thus, we employ the exponential decay schema instead of the linear decay schema. In the exponential decay schema, once n0 and q are set using the approach given in Sections III-B2 and III-B3, respectively, nj is known for each j between 0 and vmax − 1.
2). SETTING n0
In this section, we describe how to set n0, the count of validation points to be added before the first original validation point. When setting n0, we try to fulfill the following two requirements if possible:
1). Requirement 1:
When we finish the work at the fourth validation point, the model construction cost that has been incurred is ≤ C units of work, where C is a pre-set number >0. Requirement 1 is used to control the amount of time that elapses before we refine our beginning estimate of the model construction cost for the first time at the fourth validation point. This amount should not be too large.
2). Requirement 2:
From when model construction starts to the time we finish the work at the first original validation point, the cost to calculate the validation errors at the added validation points is ≤ c0P1. Here, P1 is a pre-set percentage >0. c0 denotes the model construction cost that has been incurred when we finish the work at the first original validation point, excluding the progress indicator’s overhead of calculating the validation errors at the added validation points. That is, c0 is = the cost to process the training instances before we reach the first original validation point + the cost to calculate the validation error at the first original validation point. Requirement 2 is used to control the progress indicator’s overhead that has been incurred for calculating the validation errors at the added validation points when we finish the work at the first original validation point. This overhead should not be too large.
These two requirements are soft requirements, as it may not always be possible to fully fulfill both requirements.
We have two considerations when setting the value of C in Requirement 1. On one hand, to prevent the user of the deep learning software from waiting too long before our beginning estimate of the model construction cost is refined for the first time at the fourth validation point, we do not want C to be too large. On the other hand, the smaller the C, the more validation points need to be added before the first original validation point, and subsequently due to Requirement 2, the smaller the cost of calculating the validation error at an added validation point can be. At each added validation point, the cost to calculate the validation error is ∝ the size of the randomly sampled subset of the full validation set used to calculate the model’s error rate. If C is too small, this subset will not be large enough for reasonably estimating the model’s generalization error. This will lower the progress indicator’s projection accuracy of the model construction cost and is undesirable. To strike a balance between the two considerations, we set C’s default value to 20,000 × the number of GPUs, TPUs, or central processing units (CPUs) used to train the model. This allows a non-trivial number of batches of model construction to appear between two successive validation points, as a batch of model construction typically involves much <20,000/4 = 5,000 units of work on any GPU, TPU, or CPU.
We have two considerations when setting the value of P1 in Requirement 2. On one hand, we want P1 to be small so that the progress indicator does not cause a large increase in the model construction cost during the period from when model construction starts to the time we finish the work at the first original validation point. On the other hand, if P1 is too small, at each added validation point, the randomly sampled subset of the full validation set used to calculate the model’s error rate will not be large enough for reasonably estimating the model’s generalization error. This is undesirable. There is also no need to make P1 too small. Recall that nj (0 ≤ j ≤ vmax − 1) denotes the count of validation points to be added between the j-th and the (j + 1)-th original validation points. As nj decreases as j increases, the progress indicator’s overhead of calculating the validation errors at the validation points added before the first original validation point can be amortized over time during model construction. To strike a balance between the two considerations, we set the default value of P1 to 5%.
Recall that c0 is the model construction cost that has been incurred when we finish the work at the first original validation point, excluding the progress indicator’s overhead of calculating the validation errors at the added validation points. n0 denotes the count of validation points to be added before the first original validation point. We first compute c0 and then decide the value of n0.
a: COMPUTING c0
Recall that g denotes the count of batches of model construction between two successive original validation points. B is the count of training instances in every batch. c0 is the sum of two parts. The first part is the cost to process the training instances before we reach the first original validation point
Our prior work [8] shows that the mean quantity of work taken to process a validation instance one time to calculate the validation error is 1/3 unit of work. Recall that V is the count of data instances that are in the full validation set. The second part of c0 is cv, the cost to calculate the validation error at the first original validation point. cv is
Adding the two components, we have c0 = gB + V/3.
b: DECIDING THE VALUE OF n0
Recall that c0 is the model construction cost that has been incurred when we finish the work at the first original validation point, excluding the progress indicator’s overhead of calculating the validation errors at the added validation points. P1 is the maximum allowed percentage increase in the model construction cost that the progress indicator causes during the period from when model construction starts to the time we finish the work at the first original validation point. C is the upper threshold of the model construction cost that has been incurred when we finish the work at the fourth validation point. cv is the cost to calculate the validation error at the first original validation point. n0 denotes the count of validation points to be added before the first original validation point.
When setting n0, we try to fulfill Requirements 1 and 2 mentioned above if possible. In attempting to fulfill Requirement 2, we can aim the cost to calculate the validation errors at the n0 validation points added before the first original validation point to be c0P1. There are two possible cases:
1) Case 1: The model construction cost that has been incurred when we are just about to arrive at the first original validation point is ≥ C (see Fig. 3). That is,
FIGURE 3.
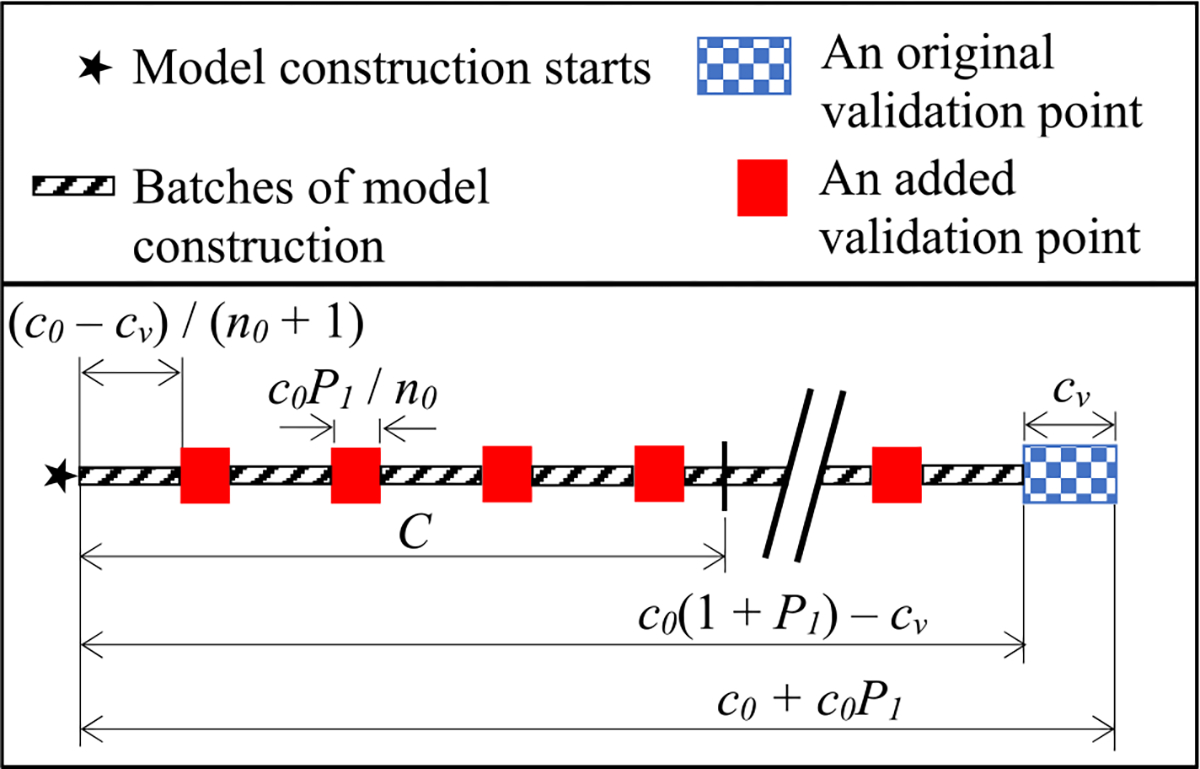
Decomposition of the model construction cost that has been incurred when we finish the work at the first original validation point.
In this case, we show that if n0 is set to
that is ≥4, Requirement 1 is fulfilled. Here, ⌈ ⌉ is the ceiling function, e.g., ⌈4.4⌉ = 5. We note that:
The cost to calculate the validation error at each of the n0 validation points added before the first original validation point is c0P1/n0.
The cost to process the training instances that has been incurred when we are just about to arrive at the first original validation point is c0 − cv, which is >0. With n0 validation points inserted before it, the first original validation point is the (n0+1)-th validation point. Thus, before we finish the work at the first original validation point, the cost to process the training instances between two successive validation points is (c0 − cv)/(n0 + 1).
The fourth validation point is the fourth validation point added before the first original validation point. The model construction cost that has been incurred when we finish the work at the fourth validation point is the sum of two components:
4c0P1/n0, the cost to calculate the validation errors at the first four validation points added before the first original validation point; and
4(c0 −cv)/(n0 +1), the cost to process the training instances before we reach the fourth validation point.
Adding these two components, we get the model construction cost that has been incurred when we finish the work at the fourth validation point
This verifies that Requirement 1 is fulfilled.
2) Case 2: The model construction cost that has been incurred when we are just about to arrive at the first original validation point is < C. That is,
In this case, if n0 is set to 4, the fourth validation point is the fourth validation point added before the first original validation point. The model construction cost that has been incurred when we finish the work at the fourth validation point is < that when we are just about to arrive at the first original validation point, and thus is < C. This shows that Requirement 1 is fulfilled.
Recall that g denotes the count of batches of model construction between two successive original validation points. At least one batch of model construction needs to occur between two successive validation points. Thus, n0 cannot exceed g − 1. To fulfill this, we set n0 to
if c0(1 + P1) − cv is ≥ C. Otherwise, if c0(1 + P1) − cv is < C, we set n0 to min(4, g − 1).
3). SETTING q
In this section, we show how to set q, the constant regulating the decay rate of nj (0 ≤ j ≤ vmax − 1) in the exponential decay schema. Recall that vmax denotes the largest number of original validation points permitted to train the model. nj (0 ≤ j ≤ vmax − 1) denotes the count of validation points to be added between the j-th and the (j+1)-th original validation points. n0 denotes the count of validation points to be added before the first original validation point. In the exponential decay schema, nj = ⌊n0qj⌉ (0 ≤ j ≤ vmax − 1).
Let pj (1 ≤ j ≤ vmax) denote the percentage increase in the model construction cost that the progress indicator causes during the period from when model construction starts to the time we finish the work at the j-th original validation point. When setting q, we try to fulfill the following requirement if possible:
Requirement 3:
pvmax is ≤ Pv, where Pv is a pre-set percentage >0.
This requirement is a soft requirement, as it may not always be possible to fully fulfill this requirement.
The increase in the model construction cost caused by the progress indicator comes from calculating the validation errors at the added validation points. Since the same number of validation instances are used to calculate the validation error at each added validation point, the cost to calculate the validation error at an added validation point is a constant. Thus, during the period from when model construction starts to the time we finish the work at the j-th (1 ≤ j ≤ vmax) original validation point, the increase in the model construction cost caused by the progress indicator is , the total count of validation points added before the j-th original validation point. During the same period, the model construction cost excluding the progress indicator’s overhead of calculating the validation errors at the added validation points is ∝ j, as both the cost to process the training instances between two successive original validation points and the cost to calculate the validation error at an original validation point are constants. As the ratio of the increase in the model construction cost caused by the progress indicator to the model construction cost excluding the progress indicator’s overhead, pj (1 ≤ j ≤ vmax) is
| (3) |
As j increases, nj and subsequently pj strictly decrease. Thus, Pv in Requirement 3 should be < P1, the maximum allowed percentage increase in the model construction cost that the progress indicator causes during the period from when model construction starts to the time we finish the work at the first original validation point. In addition, we have two other considerations when setting the value of Pv. On one hand, we want Pv to be small, as a good progress indicator should have a low run-time overhead [6]. On the other hand, the larger the Pv, the more validation points we can add before model construction finishes. This helps us obtain more accurate progress estimates for the model construction process. To strike a balance between these two considerations, we set the default value of Pv to 0.5%.
Recall that when deciding the value of n0, we aim p1 to be = P1 in attempting to fulfill Requirement 2. In the following derivation used to set q, we regard p1 to be = P1. There are two possible cases: 1) vmax is < P1/Pv and 2) vmax is ≥ P1/Pv. We discuss the two cases sequentially.
Case 1 (vmax is < P1/Pv)
We first discuss the case when vmax is < P1/Pv. Recall that vmax denotes the largest number of original validation points permitted to train the model. nj (0 ≤ j ≤ vmax − 1) denotes the count of validation points to be added between the j-th and the (j+1)-th original validation points. q (0 ≤ q < 1) is the constant regulating the decay rate of nj in the exponential decay schema. P1 is the maximum allowed percentage increase in the model construction cost that the progress indicator causes during the period from when model construction starts to the time we finish the work at the first original validation point. pj (1 ≤ j ≤ vmax) is the percentage increase in the model construction cost that the progress indicator causes during the period from when model construction starts to the time we finish the work at the j-th original validation point. We regard p1 to be = P1.
Formula (3) shows that pj (1 ≤ j ≤ vmax) is
For j = vmax, we have
For j = 1, we have
When q is 0, reaches its smallest value, which is ∝ n0/vmax and is = p1/vmax = P1/vmax. When vmax is < P1/Pv, must be > Pv. Requirement 3 cannot be fully fulfilled. To minimize and fulfill Requirement 3 as much as possible, we set q to 0.
Case 2 (vmax is ≥ P1/Pv)
Next, we discuss the case when vmax is ≥ P1/Pv. When vmax is = P1/Pv, we set q to 0 to let reach its smallest value P1/vmax = Pv and fulfill Requirement 3. When vmax is > P1/Pv, we proceed as follows.
Formula (3) shows that pj (1 ≤ j ≤ vmax) is
| (4) |
For j = vmax, we roughly have
| (5) |
For j = 1, we have
| (6) |
Dividing each side of formula (5) by the corresponding side of formula (6), we roughly have
| (7) |
Regarding p1 to be = P1 and rearranging formula (7) lead to
If we make the function of q
we can have and fulfill Requirement 3. Recall that P1 > Pv > 0. The following theorem holds.
Theorem:
For any vmax > P1/Pv, f (q) must have a unique root q in (0, 1).
Proof:
For each k (1 ≤ k ≤ vmax − 1), qk is continuous and strictly increasing on [0, 1]. Thus, f (q) is continuous and strictly increasing on [0, 1].
is <0 because vmax is > P1/Pv.
is >0 because P1 is > Pv. According to the intermediate value theorem [20], f (q) must have a root in (0, 1). As f (q) is strictly increasing on [0, 1], this root is unique. ■
We use the bisection method to find f (q)’s unique root in (0, 1) and set q to this root.
In summary, we set q to 0 if vmax is ≤ P1/Pv. Otherwise, if vmax is > P1/Pv, we set q to f (q)’s unique root in (0, 1).
The Shape of pj as a Function of j
Recall that pj (1 ≤ j ≤ vmax) strictly decreases as j increases. In this section, we show that pj decreases quickly as j increases, indicating that the progress indicator usually has a low run.time overhead.
When vmax is ≤ P1/Pv, q is set to 0. Formula (3) shows that pj (1 ≤ j ≤ vmax) is
For j = 1, we have
Thus, pj = p1/j. This is a rapidly decreasing function of j. Typically, the patience p in the early stopping condition is ≥2. When the early stopping condition is fulfilled, we have encountered ≥3 original validation points (i.e., j ≥ 3) and pj is ≤5%/3 ≈ 1.7% if p1 is = P1 = 5%.
When vmax is > P1/Pv, q is set to a number in (0, 1). Formula (4) shows that pj (1 ≤ j ≤ vmax) is roughly
Since p1 is ∝ n0/1, pj decreases faster than p1/(1 − q)/j as j increases. Fig. 4 shows a typical shape of pj as a function of j.
FIGURE 4.
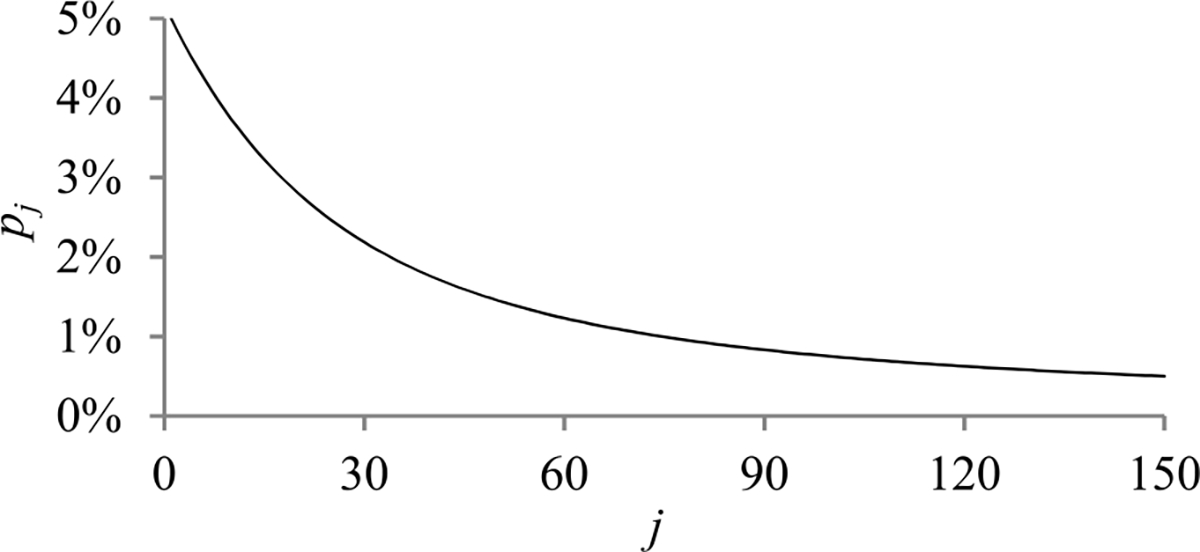
A typical shape of pj as a function of j.
C. SETTING V′
At each added validation point, we use a distinct randomly sampled subset of the full validation set to calculate the model’s error rate. Every subset contains the same number of data instances. In this section, we show how to set V′, the count of data instances that are in the subset.
Our prior work [8] shows that the mean quantity of work taken to process a validation instance one time to calculate the validation error is 1/3 unit of work. The cost to calculate the validation errors at the n0 validation points added before the first original validation point is
Recall that c0 is the model construction cost that has been incurred when we finish the work at the first original validation point, excluding the progress indicator’s overhead of calculating the validation errors at the added validation points. P1 is the maximum allowed percentage increase in the model construction cost that the progress indicator causes during the period from when model construction starts to the time we finish the work at the first original validation point. If we set
we have n0V′/3 ≈ c0P1 fulfilling Requirement 2.
As described in Sections III.E1 and III-F, our estimation method of the trend curve and the variance of the random noise requires V′ to be ≥ a threshold Vmin. This may occasionally cause Requirement 2 to be not fully fulfilled. Moreover, V′ should be ≤ V, the count of data instances that are in the full validation set. Given all the above considerations, we set
| (8) |
D. RELATIONSHIP BETWEEN THE RANDOM NOISE’S VARIANCE AND THE SIZE OF THE ACTUAL VALIDATION SET USED AT THE VALIDATION POINT
At each original validation point, the actual validation set used is the full validation set. At each added validation point, the actual validation set used is a randomly sampled subset of the full validation set. Recall that we deem the validation curve to be the sum of some zero-mean random noise and a smooth trend curve. The random noise’s variance depends on the size of the actual validation set used at the validation point. The relationship between these two numbers is previously unknown and difficult to be derived directly. However, we need to know this relationship in order to use both the original and the added validation points to predict when early stopping will occur. Noting that the random noise’s variance is equal to the validation error’s variance, we use an indirect approach to derive this relationship in two steps:
Step 1: Compute the conditional mean and the conditional variance of the validation error given the model’s generalization error [12], both of which can be expressed using the model’s generalization error and the size of the actual validation set used at the validation point.
Step 2: Use the conditional mean, the conditional variance, and the law of total variance [13] to compute the validation error’s variance, which is expressed using the mean and the variance of the model’s generalization error and the size of the actual validation set used at the validation point.
In the following, we first define a model’s generalization error and then present the two steps sequentially.
A. Model’s Generalization Error
For a classification task, a model’s generalization error is defined as the probability that a data instance is misclassified by the model [12]. A deep learning model’s generalization error at any validation point is a random variable, as three factors introduce randomness into the model construction process. First, the model is trained in batches using stochastic gradient descent [1]. Each batch processes B training instances randomly chosen from the training set. Second, the weights of the neural network model are frequently randomly initialized [1]. Third, dropout [21] is often used in model construction. When using dropout, in every batch of model construction, we randomly omit some nodes along with their connections of the neural network model.
Step 1: Compute the conditional mean and the conditional variance of the validation error given the model’s generalization error
Let Vj (Vj ≥ 1) denote the count of data instances that are in the actual validation set used at the j-th validation point. If the j-th validation point is an original validation point, Vj is = V, the count of data instances that are in the full validation set. If the j-th validation point is an added validation point, Vj is = V′, the uniform number of data instances that are in the randomly sampled subset of the full validation set used at each added validation point. Let ej (0 ≤ ej ≤ 1) denote the model’s generalization error at the j-th validation point, cj denote the count of validation instances that are misclassified by the model and in the actual validation set used at the j-th validation point, and
| (9) |
denote the validation error of the model at the j-th validation point. As an estimate of ej, is a discrete random variable.
A standard assumption used in machine learning is that all data instances are independently and identically sampled from an underlying distribution [12]. The probability that a data instance is misclassified by the model is ej. Given ej, cj follows a binomial distribution. Its probability mass function is
| (10) |
The conditional mean and the conditional variance of cj given ej are E(cj|ej) = Vjej and Var(cj|ej) = Vjej(1 − ej), respectively. From formulas (9) and (10), we have
| (11) |
and
| (12) |
Step 2: Compute the validation error’s variance
Recall that Vj (Vj ≥ 1) denotes the count of data instances that are in the actual validation set used at the j-th validation point. denotes the validation error of the model at the j-th validation point. ej denotes the model’s generalization error at the j-th validation point. Let μj (0 ≤ μj ≤ 1) and denote the mean and the variance of ej, respectively. Given two random variables X and Y, the law of total variance [13] is
We have
| (13) |
At the j-th validation point, the variance of the random noise is computed by formula (13).
E. ESTIMATING THE TREND CURVE AND THE VARIANCE OF THE RANDOM NOISE FOR FUTURE VALIDATION POINTS
Recall that we re-estimate the count of original validation points required to train the model only when we reach a validation point whose sequence number is ≥ τv and where the early stopping condition is unfulfilled. In this section, we show at such a validation point, how to estimate the trend curve and the variance of the random noise for future validation points. To do this, we need to only estimate for each j ≥ 1, the mean μj and the variance of the model’s generalization error at the j-th validation point. Once μj and are obtained, the random noise’s variance at the j-th validation point can be computed by formula (13). Moreover, the trend curve’s value at the j-th validation point is = μj. To show this, recall that is the validation error of the model at the j-th validation point. ej is the model’s generalization error at the j-th validation point. We deem the validation curve to be the sum of some zero-mean random noise and a smooth trend curve. The trend curve’s value at the j-th validation point is . Given two random variables X and Y, the law of total expectation [13] is
We have
We use maximum likelihood estimation [13] to estimate μj and . To the best of our knowledge, this is the first time that maximum likelihood estimation is used for progress indication. We consider three cases: 1) a continuous decay method is applied to the learning rate, 2) a constant learning rate is adopted, and 3) a step decay method is applied to the learning rate. The three cases are handled in Sections III-E1 to III-E3, respectively.
1). ESTIMATING μj AND WHEN A CONTINUOUS DECAY METHOD IS APPLIED TO THE LEARNING RATE
This section describes how to estimate for each j ≥ 1, the mean μj and the variance of the model’s generalization error at the j-th validation point when the learning rate changes over time based upon a continuous decay method. In such a decay method, the learning rate continuously decreases over epochs. For instance, in an exponential decay method, the learning rate adopted in the k-th epoch (k ≥ 1) is . Here, ρ > 0 is a constant regulating the decay rate of the learning rate. r0 > 0 is the beginning learning rate. To estimate μj and , we need to estimate only four parameters: a, b, and c used to model μj and λ used to model . In the following, we introduce these four parameters and then show how to estimate them.
a: a, b, AND c USED TO MODEL μj
As in our prior work [8], we use an inverse power function [6], [16]–[19] to model the trend curve. Recall that the trend curve’s value at the j-th validation point is = μj, the mean of the model’s generalization error at the j-th validation point.
Thus, we have
| (14) |
where a is >0, b is >0, c is >0, j is the validation point’s sequence number, and xj is the normalized number of batches of model construction finished before the j-th validation point
To estimate μj, we need to estimate only a, b, and c.
b: λ USED TO MODEL
The variance of the model’s generalization error varies with the learning rate. The learning rate regulates how much the weights of the neural network and therefore the model’s generalization error change over time as well as due to random variations. The larger the learning rate, the larger the changes are likely to be. When the learning rate is 0, neither the weights of the neural network nor the model’s generalization error would ever differ from their initial values. In this case, the variance of the model’s generalization error is 0. Based upon this insight, we deem the standard deviation and the variance of the model’s generalization error to be approximately ∝ the learning rate and its square, respectively. Let λ > 0 denote the ratio of the variance of the model’s generalization error to the square of the learning rate. Let rj denote the learning rate right before the j-th validation point. The variance of the model’s generalization error at the j-th validation point is modelled by
| (15) |
For each j ≥ 1, rj is known. To estimate , we need to estimate only λ.
In our prior work [8], the same validation set was used at each validation point. We regarded the variance of the validation error to depend only on and be approximately ∝ the square of the learning rate. In this work, the count of data instances that are in the actual validation set used at the validation point varies by validation points. Formula (13) shows that the variance of the validation error depends on the count of data instances that are in the actual validation set used at the validation point. Thus, we can no longer regard the variance of the validation error to depend only on the square of the learning rate. Rather, we regard the variance of the model’s generalization error to depend only on and be approximately ∝ the square of the learning rate.
c: OVERVIEW OF ESTIMATING THE PARAMETERS a, b, c, AND λ
We use maximum likelihood estimation [13] to estimate the parameters a, b, c, and λ. The likelihood function is the product of multiple integrals, which are difficult to be used directly for numerical optimization. To overcome this hurdle, for each integral, we use the probability density function of a normal distribution to approximate a key component of the integrand. In this way, we acquire a simplified form of the likelihood function, which is easy to use for numerical optimization.
In the following, we show how to estimate the parameters a, b, c, and λ in six steps. First, we present the likelihood function as the product of multiple probabilities. Second, we express each probability as an integral. Third, we show how to approximate a key component of the integrand of the integral. Fourth, we give a simplified expression of the probability. Fifth, we describe the constrained numerical optimization problem for maximizing the likelihood function and estimating a, b, c, and λ. Finally, we discuss the software package and its setting used to do numerical optimization.
d: THE LIKELIHOOD FUNCTION
We employ the validation curve up to the present validation point to estimate the parameters a, b, c, and λ. These parameters are then adopted to estimate the trend curve and the variance of the random noise for future validation points based upon formulas (13), (14), and (15). As an intuition, the validation points long before the present validation point may not well manifest the validation curve’s trend for future validation points and could be unsuited for estimating a, b, c, and λ. Like our prior work [8], to estimate a, b, c, and λ, we employ the last
validation points rather than all the validation points that we have reached so far. Here, n denotes the present validation point’s sequence number. W′ is a pre-chosen window size with a default value of 50.
Recall that denotes the validation error of the model at the j-th validation point. We deem the validation curve to be the sum of some zero.mean random noise and a smooth trend curve. The trend curve’s value at the j-th validation point is = μj. Let εj denote the random noise at the j-th validation point. We have
We regard the random noises at distinct validation points to be independent of each other. Formula (14) shows that μj is a function of a, b, and c. The likelihood function that we want to maximize and covers the validation errors at the last w validation points is
| (16) |
e: EXPRESSING AS AN INTEGRAL
Recall that and ej (0 ≤ ej ≤ 1) are the validation error and the model’s generalization error at the j-th validation point, respectively. Using the law of total probability and Bayes’ theorem [13], we have
| (17) |
Recall that μj and are the mean and the variance of the model’s generalization error at the j-th validation point, respectively. Formula (14) shows that μj is a function of a, b, and c. Formula (15) shows that is a function of λ. We regard ej to follow a normal distribution with mean μj and variance . That is,
| (18) |
Recall that cj is the count of validation instances that are misclassified by the model and in the actual validation set used at the j-th validation point. Vj is the count of data instances that are in the actual validation set used at the j-th validation point. We have
When maximizing the likelihood function, we can ignore the positive constant and focus on
| (19) |
Plugging formulas (18) and (19) into formula (17), we get
| (20) |
f: APPROXIMATING
Formula (16) shows that the likelihood function is the product of multiple integrals of the form given in formula (20). This form is difficult to be used directly for numerical optimization. To overcome the hurdle, for each integral, we use the probability density function of a normal distribution to approximate
a key component of the integrand. This enables us to obtain a simplified form of the integral, which is easy to use for numerical optimization.
Recall that Vj is the count of data instances that are in the actual validation set used at the j-th validation point. and ej (0 ≤ ej ≤ 1) are the validation error and the model’s generalization error at the j-th validation point, respectively. When we reach the j-th validation point, both Vj and are known.
is ∝ a beta distribution’s probability density function [13]
where x = ej (0 ≤ x ≤ 1) is the variable,
and B(α, β) is a normalization constant. The mean and the variance of the beta distribution are
| (21) |
and
| (22) |
respectively.
When α is ≥10 and β is ≥10, we can approximate the beta distribution by a normal distribution that has the same mean and variance as the beta distribution [22]. That is, we roughly have
| (23) |
Usually, Vj is large enough to make α ≥ 10 and β ≥ 10. For example, even if is as small as 0.02, having Vj ≥ 450 is sufficient to make α ≥ 10 and β ≥ 10. Occasionally for an j, which typically links to an added validation point, Vj may not be large enough to make α ≥ 10 and β ≥ 10. In this case, we employ the approach described in Section III.F to increase Vj and make α ≥ 10 and β ≥ 10 if possible. Regardless of whether α is ≥10 and β is ≥10, we always use formula (23) to simplify the expression of .
g: COMPUTING A SIMPLIFIED EXPRESSION OF
Plugging formula (23) into formula (20), the integrand in formula (20) is roughly
| (24) |
where
| (25) |
and
| (26) |
In formula (24), the part in the square brackets is the probability density function of a normal distribution with mean and variance . The part outside the square brackets has nothing to do with ej. Let Φ(x) denote the cumulative distribution function of a standard normal distribution [13]. Plugging formula (24) into formula (20), we roughly have
| (27) |
h: MAXIMIZING THE LIKELIHOOD FUNCTION
According to formula (16), the log-likelihood function is
| (28) |
Plugging formula (27) into formula (28) shows that to maximize the log-likelihood function, we only need to minimize
| (29) |
Plugging formulas (14) and (15) into formulas (25), (26), and (29), we obtain the objective function to be minimized:
| (30) |
where
| (31) |
and
This numerical optimization problem is subject to five constraints: a > 0, b > 0, c > 0, λ > 0, and
Recall that xj denotes the normalized number of batches of model construction finished before the j-th validation point. To derive the last constraint, recall that w denotes the count of validation points used to estimate a, b, c, and λ. n denotes the present validation point’s sequence number. μj (0 ≤ μj ≤ 1) is the mean of the model’s generalization error at the j-th validation point. Formula (14) shows that
As j increases, xj strictly increases and hence μj strictly decreases. μj is always >0. If
is ≤1, μj is in [0, 1] for each j between n − w + 1 and n.
In summary, we estimate a, b, c, and λ by minimizing the objective function given by formula (30) subject to five constraints: a > 0, b > 0, c > 0, λ > 0, and
i: THE SOFTWARE PACKAGE AND ITS SETTING USED TO DO NUMERICAL OPTIMIZATION
We use the interior.point algorithm [23, Ch. 19], [24] implemented in the software package Artelys Knitro [25] to solve this constrained minimization problem. Typically, the estimated a, b, c, and λ are roughly on the order of magnitude of 0.1, 0.1 [17]–[19], 0.1, and 100, respectively. Accordingly, when conducting numerical optimization, we initialize a, b, c, and λ to 0.1, 0.1, 0.1, and 100, respectively.
During the constrained numerical optimization process, one could allow the constraints to be violated [23, Ch. 15.4]. However, if the constraint
is violated, could be >1 for one or more j between n − w + 1 and n (see formula (31)). If is ≫1 and is small, numerical underflow could occur in computing
causing issues when we compute
in formula (30). To avoid this issue, we set the bar_feasible parameter in Artelys Knitro to either 1 or 3 to ensure that the five constraints are always satisfied during the entire constrained numerical optimization process [26].
2). ESTIMATING μj AND WHEN A CONSTANT LEARNING RATE IS ADOPTED
In this section, we describe how to estimate for each j ≥ 1, the mean μj and the variance of the model’s generalization error at the j-th validation point when a constant learning rate is used. This case is a special case of applying an exponential decay method to the learning rate, when the constant ρ regulating the decay rate of the learning rate is 0. We employ the same approach in Section III-E1 to estimate μj and for each j ≥ 1.
3). ESTIMATING μj AND WHEN A STEP DECAY METHOD IS APPLIED TO THE LEARNING RATE
This section describes how to estimate for each j ≥ 1, the mean μj and the variance of the model’s generalization error at the j-th validation point when the learning rate changes over time based upon a step decay method.
As Fig. 5(a) shows, in a step decay method, we cut the learning rate by a pre-chosen factor that is >1 after a given number of epochs. This factor could change over epochs in a pre-determined fashion. Fig. 5(b) presents a correspondent example validation curve. A decay point is defined as an original validation point at which the learning rate is cut. The decay points partition the validation curve into several pieces. For every j ≥ 1, the first original validation point on the (j + 1)-th piece is the j-th decay point. When model construction begins, both the learning rate used on and the position of each piece are known.
FIGURE 5.
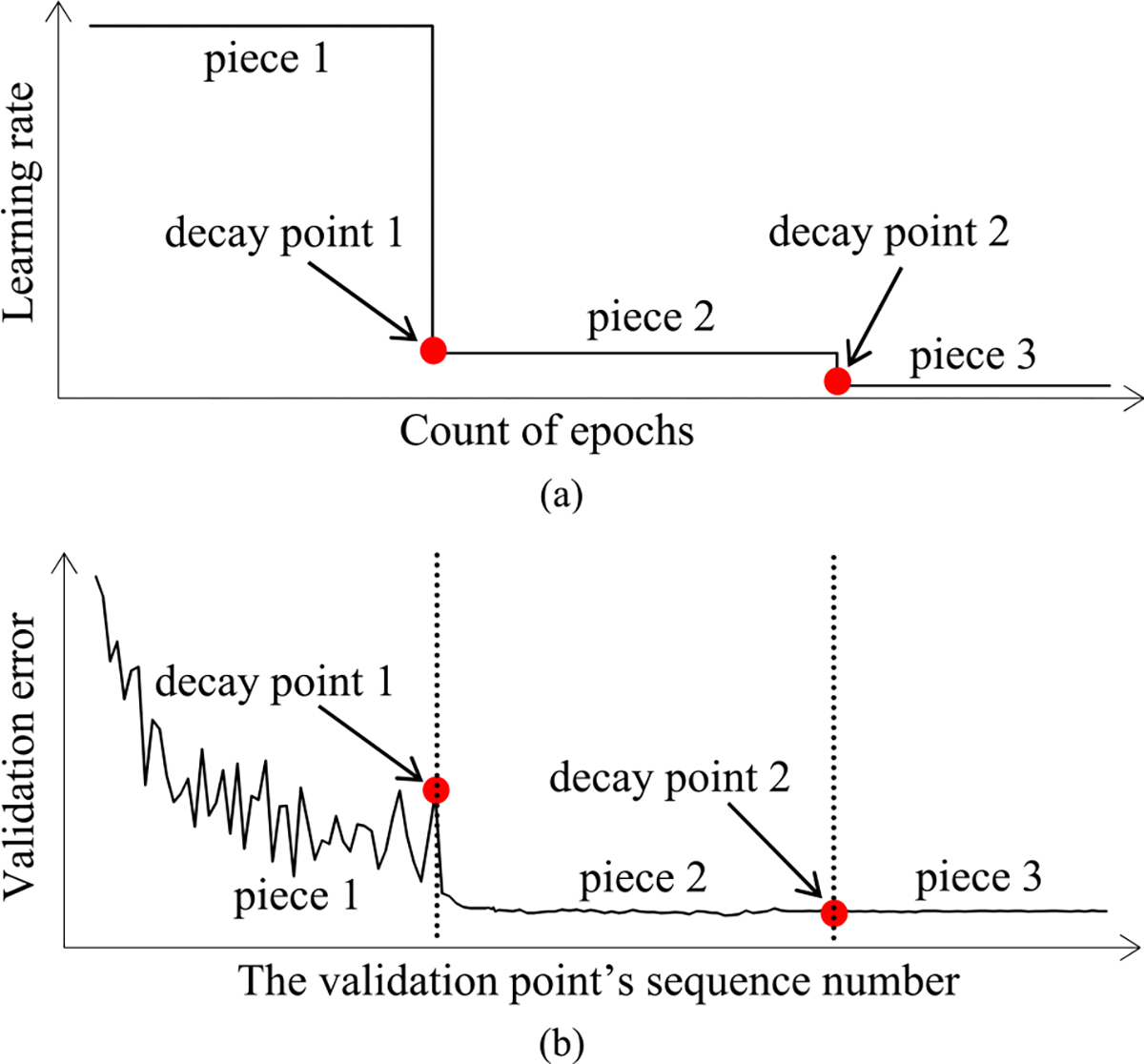
When the learning rate changes over time based upon a step decay method, the learning rate over epochs and an example validation curve. (a) The learning rate over epochs. (b) An example validation curve.
As we move from one piece of the validation curve to the next, both the learning rate and the variance of the model’s generalization error change. We consider this when estimating μj and for each j ≥ 1. As in Section III-E1, to estimate μj and , we need to estimate only the four parameters a, b, c, and λ used to model μj and . There are two possible cases: 1) the present validation point resides on the first piece of the validation curve, and 2) the present validation point resides on the k-th (k ≥ 2) piece of the validation curve. We discuss the two cases sequentially.
Case 1 (The Present Validation Point Resides on the First Piece of the Validation Curve)
When the present validation point resides on the first piece of the validation curve, we adopt the method in Section III-E1 to estimate a, b, c, and λ.
Case 2 (The Present Validation Point Resides on the k.th (k ≥ 2) Piece of the Validation Curve)
Next, we discuss the case of the present validation point residing on the k-th (k ≥ 2) piece of the validation curve. As shown in Fig. 5(b), because of the decay of the learning rate at a decay point, the validation curve frequently drops abruptly at this point as well as at the next few validation points. As Fig. 6 shows, when one arrives at a validation point that is not far after such a decay point, this drop could result in an inaccurately estimated trend curve if the estimation method in Section III-E1 were used.
FIGURE 6.
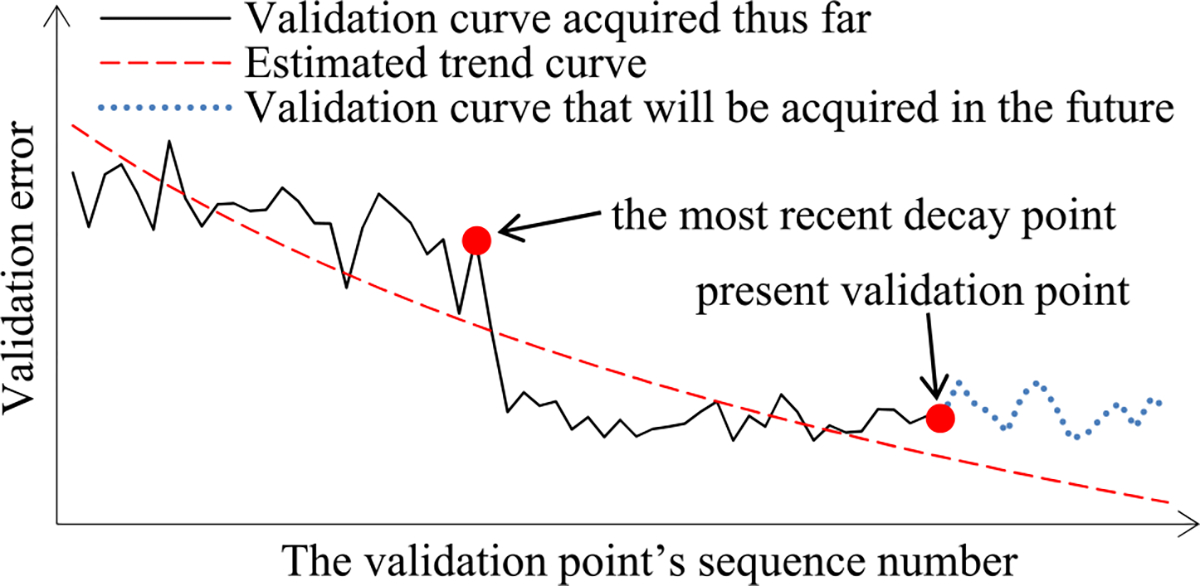
Employing the method in Section III-E1 to estimate the trend curve when one arrives at a validation point that is not far after the most recent decay point.
To deal with this issue, we revise the estimation method in Section III-E1. Let lj (j ≥ 1) denote the count of validation points that are on the j-th piece of the validation curve. Each lj is known beforehand. Recall that at least τv = 4 data points are needed to estimate a, b, c, and λ. Usually, lj is ≥ τv for each j ≥ 1.
is the sequence number of the final validation point that is on the prior piece of the validation curve. Let vk−1 denote the count of both original and added validation points required to train the model that is projected at the final validation point on the prior piece. If the vk−1-th validation point resides on the present k-th piece, vk−1 − sk−1 is this validation point’s sequence number on the present k-th piece. Recall that n is the present validation point’s sequence number. Let h(n) denote the present validation point’s sequence number on the present k-th piece. h(n) is ≤ lk. There are two possible scenarios (see Fig. 7).
FIGURE 7.
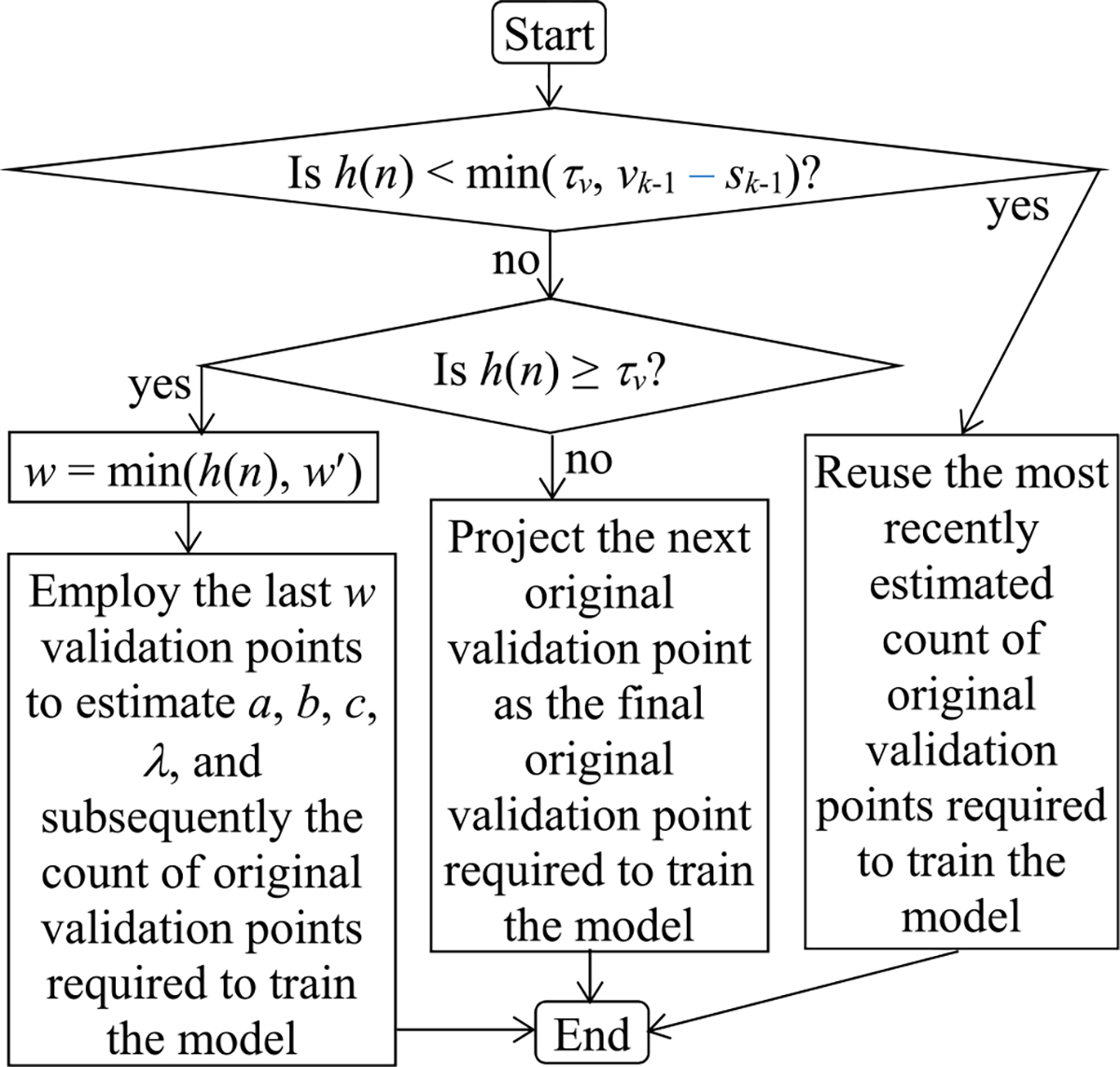
The flowchart of estimating the count of original validation points required to train the model when the present validation point resides on the k-th (k ≥ 2) piece of the validation curve.
In the first scenario, h(n) is <min(τv, vk−1 − sk−1). In this case, we do not have enough validation points to estimate a, b, c, and λ. We reuse the most recently estimated count of original validation points required to train the model. Since τv is small, we often pass the phase of not updating the estimated count of original validation points required to train the model in a reasonably short period of time.
In the second scenario, h(n) is ≥min(τv, vk−1 − sk−1). If vk−1 − sk−1 ≤ h(n) < τv, we project the next original validation point as the final original validation point required to train the model. Otherwise, if h(n) is ≥ τv, we revise the method in Section III-E1 in the following two ways to estimate a, b, c, and λ.
First, recall that xj denotes the normalized number of batches of model construction finished before the j-th validation point. The trend curve’s value at the j-th validation point is = μj. As shown in Fig. 5(b), if moved to the left by , the present piece of the trend curve has approximately the same form as an inverse power function. We adopt the same shifted inverse power function
rather than formula (14) to model μj.
Second, recall that w′ denotes the largest number of validation points permitted to estimate a, b, c, and λ. n denotes the present validation point’s sequence number. h(n) denotes the present validation point’s sequence number on the present piece of the validation curve. We employ the last
validation points on the present piece of the validation curve rather than the last min(n, w′) validation points to estimate a, b, c, and λ.
F. DETERMINING Vmin
In this section, we show how to determine Vmin, the minimum number of data instances needed in the randomly sampled subset of the full validation set used at an added validation point.
Recall that Vj (j ≥ 1) is the count of data instances that are in the actual validation set used at the j-th validation point. denotes the validation error of the model at the j-th validation point. At an added validation point, Vj is computed by formula (8) that involves Vmin. In Section III-E1, we use a normal distribution to approximate a beta distribution with parameters
and
This approximation is reasonably precise if α is ≥10 and β is ≥10 [22], which is equivalent to and . If we know lower bound bl > 0 and upper bound bu < 1, we can set Vmin to
to raise the chance of α being ≥10 and β being ≥10 for each j ≥ 1. However, bl and bu are unknown beforehand. To address this issue, we start from an initial estimate of bl and an initial estimate of bu and set Vmin to
| (32) |
During model construction, could fall out of at some added validation point, making it possible to have α < 10 or β < 10. At any added validation point, if falls out of , we lower or raise to make include and then re-compute Vmin to make it larger. At any original validation point, if falls out of , we do not adjust and because the full validation set is used and there is no way to make Vj larger.
We have two considerations when setting the initial values of and . First, the larger the and the smaller the , the more likely will fall out of at some added validation point during model construction, which is undesirable. Second, if is too small or is too large, the Vmin computed by formula (32) will be too large. Consequently, Vj could also be too large, undesirably increasing the progress indicator’s run-time overhead. To strike a balance between these two considerations, we set the initial values of and to 0.02 and 0.98, respectively.
During model construction, if the validation error at an added validation point is outside of , we proceed as follows:
Step 1: If is , we change to . If is , we change to .
Step 2: Use formula (32) to re-compute Vmin. If is = 0 or 1, which is unlikely to occur in practice, we set Vmin to +∞.
Step 3: Use formula (8) to re-compute V′, the uniform number of data instances that are in the randomly sampled subset of the full validation set used at each added validation point.
Step 4: If the new V′ differs from the old V′, we re-sample the full validation set to obtain a new subset and re-compute , the model’s error rate on the subset. The count of data instances that are in the subset is the new V′, which will also be used at each added validation point after the present validation point.
Step 5: If is re-computed in Step 4 and the new is outside of , we repeat Steps 1–4 until the new is within .
In practice, we rarely need to change V′ from its initially computed value because 1) the initial is wide and has a high likelihood to include , and 2) if the initially computed V′ is > the Vmin re-computed in Step 2, no value change will be made to V′ in Step 3.
G. ESTIMATING THE MODEL CONSTRUCTION COST BASED UPON THE PROJECTED COUNT OF ORIGINAL VALIDATION POINTS REQUIRED TO TRAIN THE MODEL
After estimating the trend curve and the variance of the random noise, we can project the model construction cost. The Monte Carlo simulation method in our prior paper [8] is used to estimate nv, the count of original validation points required to train the model. Recall that V′ is the uniform number of data instances that are in the randomly sampled subset of the full validation set used at each added validation point. nj (0 ≤ j ≤ vmax − 1) is the count of validation points to be added between the j-th and the (j + 1)-th original validation points. q is the constant regulating the decay rate of nj (0 ≤ j ≤ vmax − 1) in the exponential decay schema. Our prior work [8] shows that the mean quantity of work taken to process a validation instance one time to calculate the validation error is 1/3 unit of work. The model construction cost is the sum of three components:
The cost to process the training instances, which is computed using formula (1).
The cost to calculate the validation errors at the original validation points, which is computed using formula (2).
The cost to calculate the validation errors at the added validation points
IV. PERFORMANCE
This section presents the performance test results of our new progress indication method for constructing deep learning models. TensorFlow is a commonly used open-source software package for deep learning created by Google [14]. We implemented our new method in TensorFlow Version 1.13.1. In each test, our progress indicators gave informative estimates and revised them every 10 seconds with minute overhead, fulfilling the progress indication goals of low overhead, continuously revised updates, and reasonable pacing listed in our prior paper [6].
A. DESCRIPTION OF THE EXPERIMENTS
The experiments were performed by running TensorFlow on a Digital Storm workstation. The workstation runs the Ubuntu 18.04.02 operating system and has 64GB memory, one eight-core Intel Core i7–9800X 3.8GHz CPU, one GeForce RTX 2080 Ti GPU, one 3TB SATA disk, and one 500GB solid-state drive. Every deep learning model was constructed on an unloaded system and using the GPU.
We tested two standard deep learning models: the Gated Recurrent Unit (GRU) model, a recurrent neural network, used in Purushotham et al. [27] and the convolutional neural network GoogLeNet [28]. For every model, we tested four standard optimization algorithms for constructing deep learning models: root mean square propagation (RMSprop) [29], classical stochastic gradient descent (SGD) [30], adaptive gradient (AdaGrad) [31], and adaptive moment estimation (Adam) [32]. For each (deep learning model, optimization algorithm) pair, three learning rate decay methods were tested: using an exponential decay method, a step decay method, and a constant learning rate. We present the test results for GoogLeNet using Adam and the GRU model using RMSprop. The test results for the other (deep learning model, optimization algorithm) pairs are similar and shown in the Appendix in the full version of the paper [33]. There is one exception. For the step decay method, we present the test results for GoogLeNet using Adam. The test results for using RMSprop and the step decay method to construct the GRU model are similar and shown in the Appendix in the full version of the paper [33].
We employed two popular benchmark data sets shown in Table 3: CIFAR-10 [34] and MIMIC-III [35]. GoogLeNet was trained on CIFAR-10. In CIFAR-10, every data instance is an image of size 32 × 32. CIFAR-10 was split into a validation set and a training set as described in Krizhevsky [34]. The GRU model was trained on a subset of the MIMIC-III data set called “Feature Set C, 48-h data” to perform the “ICD-9 code group prediction” task in Purushotham et al. [27]. In the subset, every data instance is a sequence of length 48. The subset was partitioned into a validation set and a training set as described in Purushotham et al. [27].
TABLE 3.
The data sets that we used to test our progress indication method.
| Name | Count of data instances that are in the validation set | Count of data instances that are in the training set | Count of classes | Data instance size |
|---|---|---|---|---|
|
| ||||
| CIFAR-10 | 10,000 | 50,000 | 10 | image size: 32×32 |
| Feature Set C, 48-h data | 6,845 | 20,532 | 20 | sequence length: 48 |
Except for the largest number of epochs permitted to train the model and the learning rate decay method, all the hyper-parameters were given their default values that appeared in the open source code of GoogLeNet and the GRU model [36], [37]. In particular, the count of training instances in every batch was = 100 and 128 for the GRU model and GoogLeNet, respectively. In each test, the beginning learning rate was = 0.001. The patience p was = 11, an integer randomly selected from [3, 25]. The min_delta δ was = 0.00131, a number randomly selected from [0, 0.01]. The largest number of epochs permitted to train the model was = 150. An original validation point was put at or near the end of each epoch of model construction. Accordingly, the count of batches of model construction between two successive original validation points was 390 and 205 for GoogLeNet and the GRU model, respectively.
Recall that vmax denotes the largest number of original validation points permitted to construct the model. nj (0 ≤ j ≤ vmax − 1) is the count of validation points added between the j-th and the (j + 1)-th original validation points. n0 is the count of validation points added before the first original validation point. q is the constant regulating the decay rate of nj (0 ≤ j ≤ vmax − 1) in the exponential decay schema. V′ is the uniform number of data instances that are in the randomly sampled subset of the full validation set used at each added validation point. For each of GoogLeNet and the GRU model, Table 4 shows the n0, q, and V′ set by the approach given in Section III-B. In our experiments, V′ never changed during model construction.
TABLE 4.
For each of GoogLeNet and the GRU model, the n0, q, and V′ set by the approach given in Section III-B.
| Model | n0 | q | V′ |
|---|---|---|---|
|
| |||
| GoogLeNet | 11 | 0.93 | 726 |
| GRU | 5 | 0.93 | 683 |
B. ACCURACY MEASURE
We used the average prediction error adopted in Chaudhuri et al. [38] to gauge the progress indicator’s estimation accuracy. The average prediction error is the ratio of a numerator to a denominator (see Fig. 8). The area of the region between a straight diagonal line and a curve is the numerator. The straight line shows the real model construction time left. The curve shows the progress indicator’s estimate of the model construction time left over time. The area of the triangle created by the straight diagonal line, the y-axis, and the x-axis is the denominator. The larger the average prediction error, the less accurate the estimates given by the progress indicator.
FIGURE 8.
The areas of the regions employed to calculate the average prediction error.
C. COMPARISON OF THREE PROGRESS INDICATION METHODS FOR CONSTRUCTING DEEP LEARNING MODELS
We compared the accuracy of the progress estimates provided by three progress indication methods for constructing deep learning models:
Method 1: This is our prior method [8].
Method 2: This is a hybrid of our prior and new methods. We use the approach in Section III-B to insert extra validation points between the original validation points, the approach in Section III-C to set the uniform number of data instances that are in the randomly sampled subset of the full validation set used at each added validation point, the approach in our prior paper [8] to predict the count of original validation points required to train the model, and the approach in Section III-G to estimate the model construction cost based upon the projected number. We disregard the dependency of the random noise’s variance on the size of the actual validation set used at the validation point. Instead, as in our prior paper [8], we deem the random noise’s variance to be approximately α the square of the learning rate with no reliance on the size of the actual validation set used at the validation point.
Method 3: This is our new method shown in Section III.
We conducted 24 tests, one for every combination of a deep learning model, an optimization algorithm, and a learning rate decay method. In each test, we constructed the deep learning model five times, each in a distinct run. In each run, we used each of the three progress indication methods to provide progress estimates. For each test, Table 5 shows the standard deviation and the mean of the average prediction error over the five runs for each of the three methods. For each test, the smallest mean of the average prediction error over the five runs across the three methods is marked in bold in Table 5.
TABLE 5.
For each of the 24 tests, the mean as well as the standard deviation of the average prediction error over the five runs for each of the three progress indication methods.
| Deep learning model | Learning rate decay method | Optimization algorithm | Average prediction error |
||
|---|---|---|---|---|---|
| Progress indication method 1 | Progress indication method 2 | Progress indication method 3 | |||
|
| |||||
| GoogLeNet | Using a constant learning rate | Adam | 0.50±0.10 | 0.45±0.12 | 0.51±0.14 |
| RMSprop | 0.53±0.25 | 0.42±0.11 | 0.42±0.13 | ||
| SGD | 0.18±0.03 | 0.30±0.01 | 0.11±0.01 | ||
| AdaGrad | 0.17±0.07 | 0.41±0.02 | 0.15±0.02 | ||
|
| |||||
| Exponential decay method | Adam | 2.46±1.20 | 1.46±0.66 | 0.89±0.26 | |
| RMSprop | 1.20±0.51 | 0.79±0.19 | 0.66±0.05 | ||
| SGD | 1.32±0.53 | 0.97±0.31 | 0.70±0.20 | ||
| AdaGrad | 1.22±0.29 | 0.80±0.16 | 0.58±0.09 | ||
|
| |||||
| Step decay method | Adam | 0.45±0.06 | 0.45±0.07 | 0.44±0.11 | |
| RMSprop | 0.73±0.50 | 0.54±0.14 | 0.57±0.14 | ||
| SGD | 0.40±0.04 | 0.49±0.05 | 0.34±0.09 | ||
| AdaGrad | 0.35±0.04 | 0.44±0.05 | 0.52±0.09 | ||
|
| |||||
| GRU | Using a constant learning rate | Adam | 1.94±0.67 | 0.54±0.08 | 0.48±0.05 |
| RMSprop | 1.55±0.53 | 0.60±0.17 | 0.52±0.19 | ||
| SGD | 0.65±0.08 | 0.43±0.08 | 0.58±0.12 | ||
| AdaGrad | 0.93±0.60 | 0.52±0.03 | 0.48±0.08 | ||
|
| |||||
| Exponential decay method | Adam | 2.40±1.17 | 0.60±0.18 | 0.44±0.13 | |
| RMSprop | 1.27±0.22 | 0.44±0.13 | 0.25±0.09 | ||
| SGD | 1.39±0.25 | 0.93±0.15 | 0.51±0.07 | ||
| AdaGrad | 1.45±0.62 | 0.66±0.58 | 0.42±0.26 | ||
|
| |||||
| Step decay method | Adam | 1.94±0.60 | 0.55±0.18 | 0.46±0.17 | |
| RMSprop | 1.59±0.17 | 0.51±0.07 | 0.47±0.13 | ||
| SGD | 0.57±0.10 | 0.41±0.08 | 0.55±0.12 | ||
| AdaGrad | 1.99±0.50 | 0.63±0.21 | 0.45±0.16 | ||
|
| |||||
| Over all runs in all tests | 1.13±0.84 | 0.60±0.33 | 0.48±0.21 | ||
1). COMPARISON OF METHODS 1 AND 3
In 20 of the 24 tests, method 3 beat method 1 and had a smaller mean of the average prediction error over the five runs. Method 1 outperformed method 3 in the other two tests: 1) using Adam and a constant learning rate to construct GoogLeNet, and 2) using AdaGrad and applying a step decay method to the learning rate to construct GoogLeNet. The mean of the average prediction error over all runs in all tests for method 3 is 0.48, which is 57.5% lower than the corresponding mean of 1.13 for method 1. Thus, compared with using our prior method [8], using our new method reduces the progress indicator’s prediction error of the model construction time left. Moreover, our new method gave decently accurate estimates of the model construction time left.
2). COMPARISON OF METHODS 2 AND 3
In 18 of the 24 tests, method 3 beat method 2 and had a smaller mean of the average prediction error over the five runs. Method 2 outperformed method 3 in the other five tests: 1) using Adam and a constant learning rate to construct GoogLeNet, 2) using RMSprop and applying a step decay method to the learning rate to construct GoogLeNet, 3) using AdaGrad and applying a step decay method to the learning rate to construct GoogLeNet, 4) using SGD and a constant learning rate to construct the GRU model, and 5) using SGD and applying a step decay method to the learning rate to construct the GRU model. The mean of the average prediction error over all runs in all tests for method 3 is 0.48, which is 20.0% lower than the corresponding mean of 0.60 for method 2. Thus, considering the dependency of the random noise’s variance on the size of the actual validation set used at the validation point raises the progress indicator’s prediction accuracy.
In Sections IV-D to IV-F and the Appendix in the full version of the paper [33], we focus on the new progress indication method described in Section III. Yet, for the model construction time left, we show the estimates provided by both the old and the new progress indication methods. Recall that in each of the 24 tests, we constructed the deep learning model five times, each in a distinct run. We randomly selected one of the five runs and present the outputs of the progress indicator over time for that run.
D. TEST RESULTS FOR ADOPTING A CONSTANT LEARNING RATE
This section presents the test results for adopting a constant learning rate.
1). TEST RESULTS FOR CONSTRUCTING GOOGLENET
In the test, we used the Adam optimization algorithm and a constant learning rate to construct GoogLeNet. Fig. 9 depicts the progress indicator’s estimated model construction cost over time, with the dotted horizontal line showing the real model construction cost. Before reaching τv = 4 validation points within 39 seconds, the progress indicator estimated the model construction cost based upon the largest number of original validation points permitted to train the model, which diverged notably from the real count of original validation points required to train the model. As a result, the estimated model construction cost greatly differed from the real model construction cost. After reaching four or more validation points, the progress indicator refined the estimated model construction cost for it to become more accurate over time.
FIGURE 9.
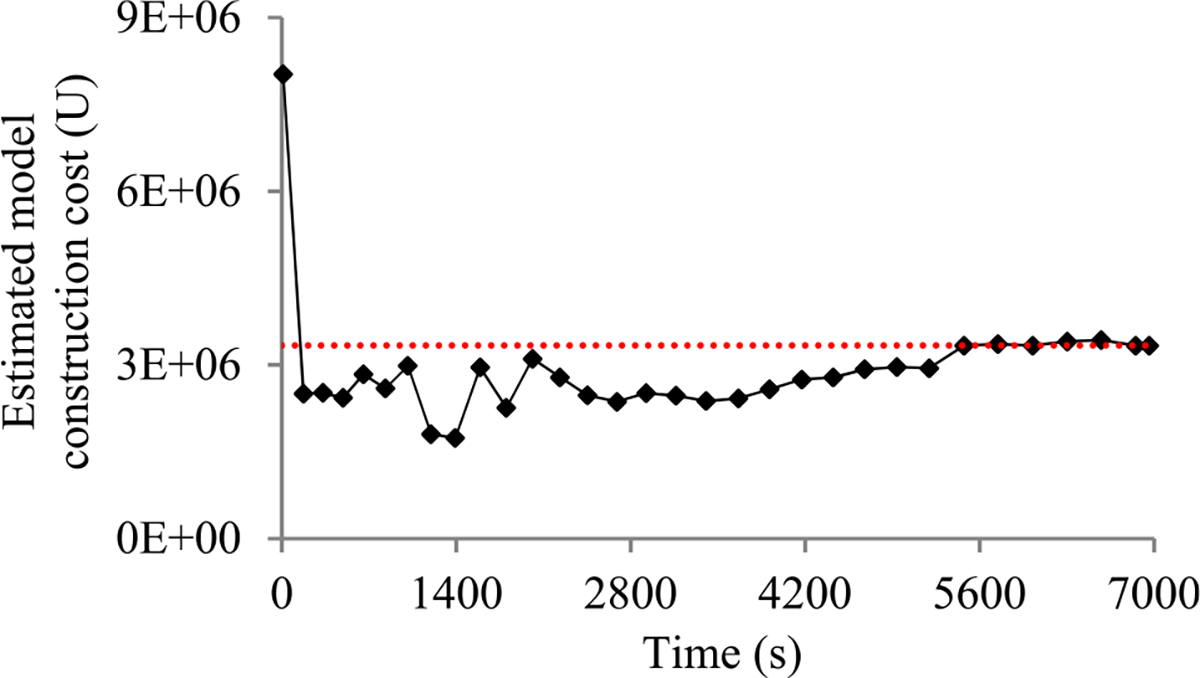
Model construction cost estimated over time (using Adam and a constant learning rate to construct GoogLeNet).
Fig. 10 depicts the model construction speed that the progress indicator observed over time. This speed was relatively stable during the whole model construction process.
FIGURE 10.

Model construction speed over time (using Adam and a constant learning rate to construct GoogLeNet).
Fig. 11 and 12 depict the remaining model construction time estimated by the old and the new progress indication methods over time, with the dashed line showing the real model construction time left. Before 691 seconds, the old method’s [8] estimate of the model construction time left differed notably from the real model construction time left. The new method reached the stage of giving relatively accurate estimates of the model construction time left much faster than the old method.
FIGURE 11.
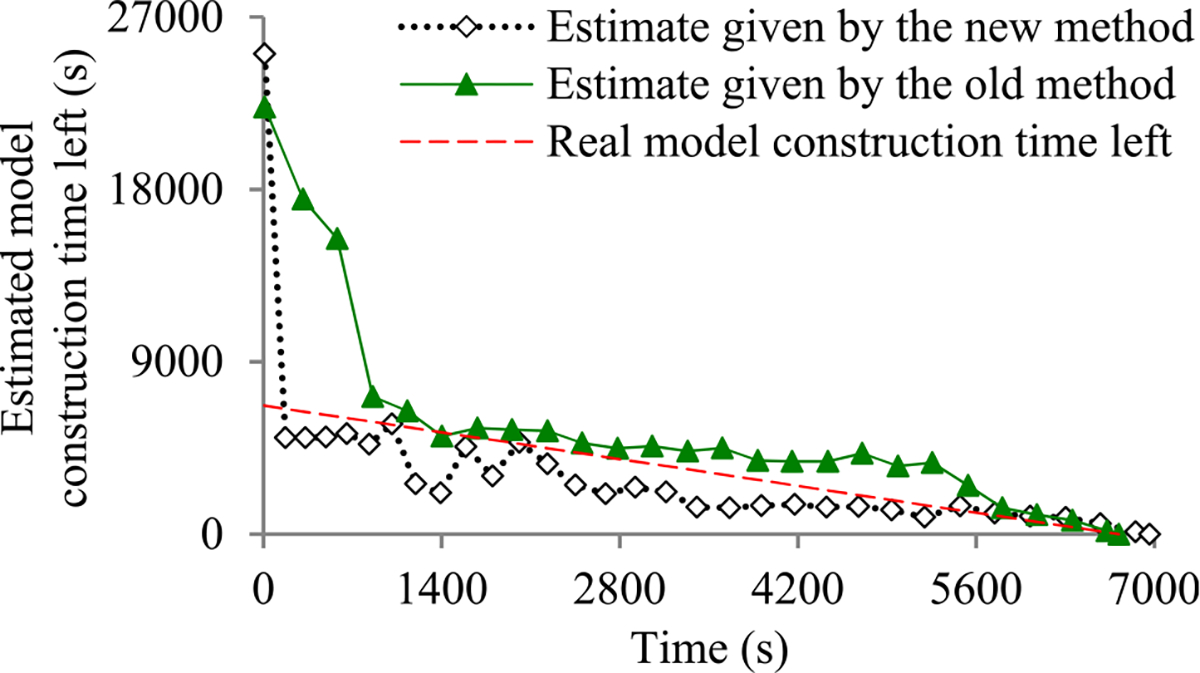
Estimated model construction time left (using Adam and a constant learning rate to construct GoogLeNet).
FIGURE 12.
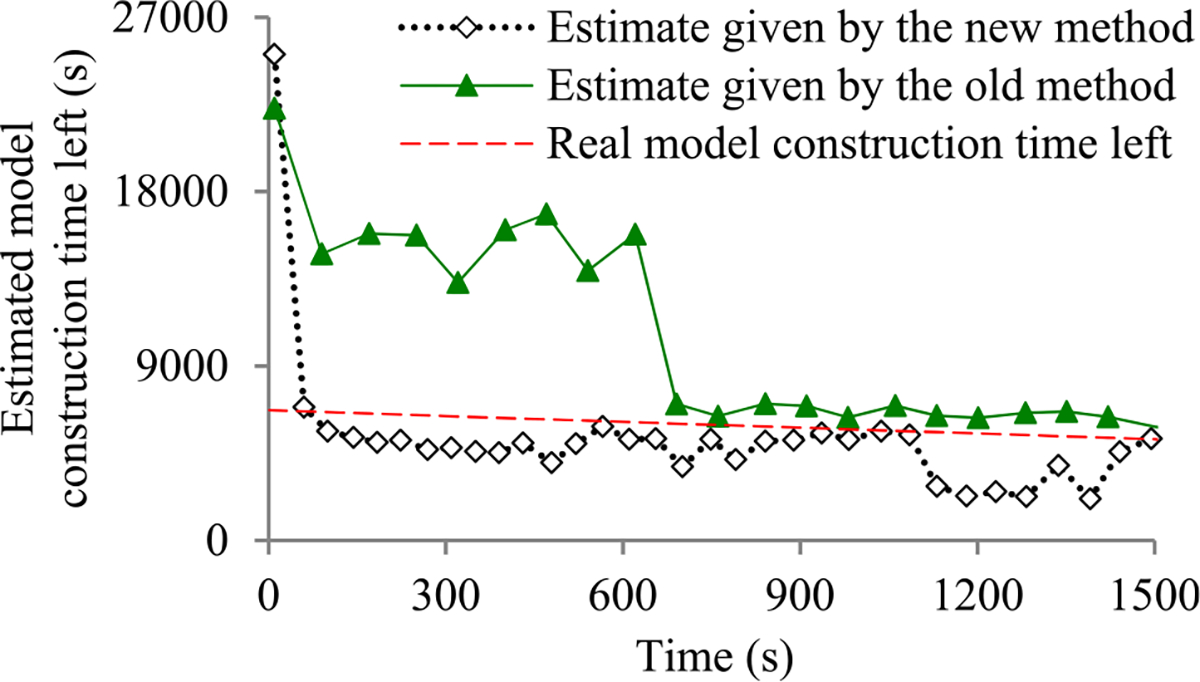
Estimate of the model construction time left at the early stage of model construction (using Adam and a constant learning rate to construct GoogLeNet).
Fig. 13 depicts the progress indicator’s estimate over time of the finished percentage of model construction work. The curve showing the estimated finished percentage is reasonably close to the diagonal dotted line linking the upper right and the lower left corners.
FIGURE 13.
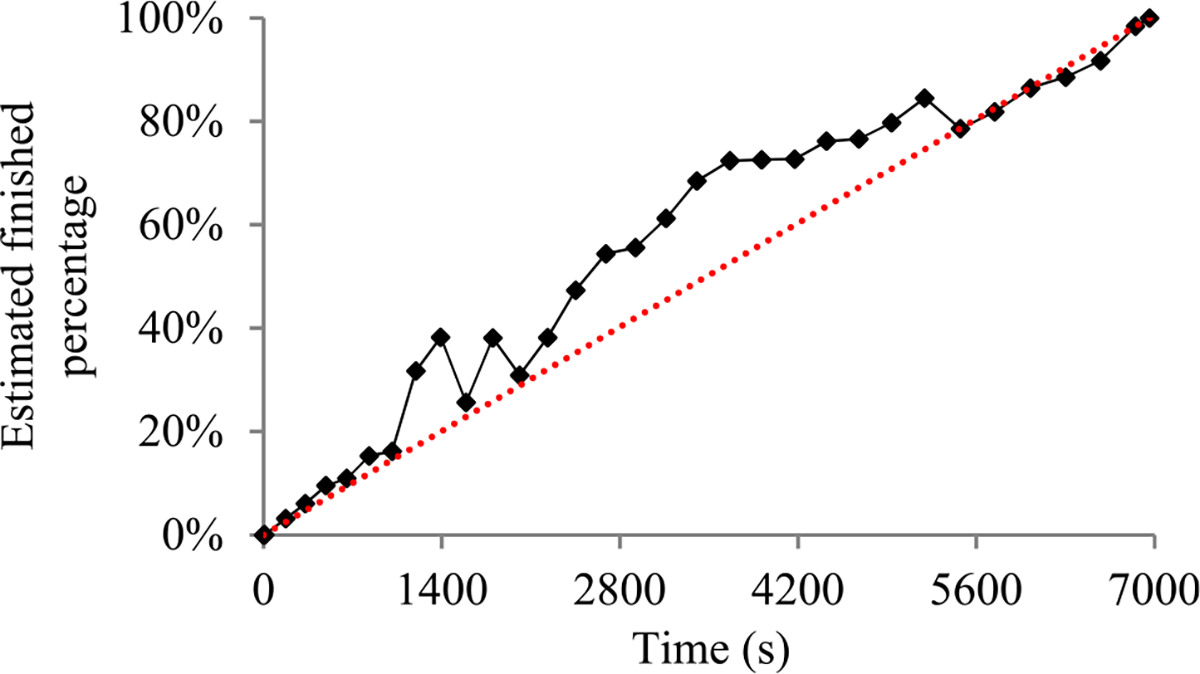
Finished percentage estimated over time (using Adam and a constant learning rate to construct GoogLeNet).
2). TEST RESULTS FOR CONSTRUCTING THE GRU MODEL
In the test, we used the RMSprop optimization algorithm and a constant learning rate to construct the GRU model. We wanted to show that the estimates given by the progress indicator can be decently accurate for distinct kinds of neural networks.
Fig. 14 depicts the progress indicator’s estimated model construction cost over time, with the dotted horizontal line showing the real model construction cost. After we reached τv = 4 validation points within 7 seconds, the estimated model construction cost became decently accurate for the rest of the model construction process.
FIGURE 14.

Model construction cost estimated over time (using RMSprop and a constant learning rate to construct the GRU model).
Fig. 15 depicts the model construction speed that the progress indicator observed over time. This speed was relatively stable during the whole model construction process.
FIGURE 15.

Model construction speed over time (using RMSprop and a constant learning rate to construct the GRU model).
Fig. 16 depicts the remaining model construction time estimated by the old and the new progress indication methods over time, with the dashed line showing the real model construction time left. The new method reached the stage of giving relatively accurate estimates of the model construction time left much faster than the old method. In fact, the new method’s estimate of the model construction time left was decently accurate during the whole model construction process.
FIGURE 16.
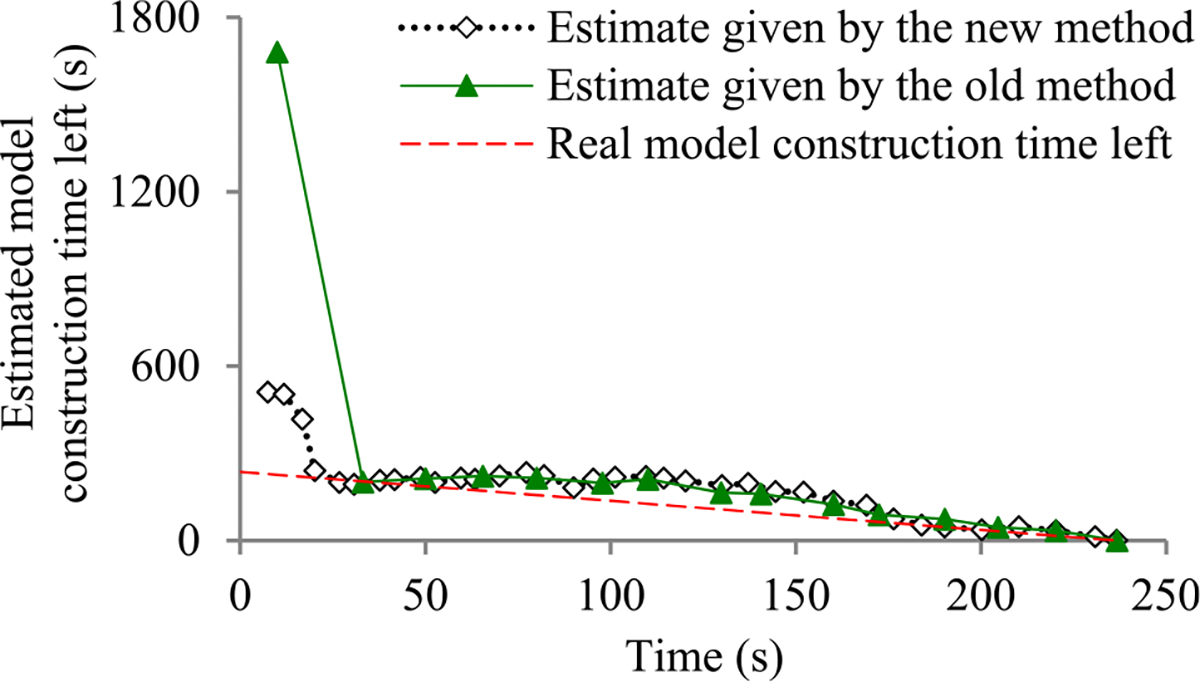
Estimated model construction time left (using RMSprop and a constant learning rate to construct the GRU model).
Fig. 17 depicts the progress indicator’s estimate over time of the finished percentage of model construction work. The curve showing the estimated finished percentage is reasonably close to the diagonal dotted line linking the upper right and the lower left corners.
FIGURE 17.

Finished percentage estimated over time (using RMSprop and a constant learning rate to construct the GRU model).
E. TEST RESULTS FOR APPLYING AN EXPONENTIAL DECAY METHOD TO THE LEARNING RATE
This section presents the test results for applying an exponential decay method to the learning rate. We set the constant ρ regulating the decay rate of the learning rate to 0.05.
1). TEST RESULTS FOR CONSTRUCTING GOOGLENET
In the test, we used the Adam optimization algorithm and applied an exponential decay method to the learning rate to construct GoogLeNet. Fig. 18–21 depict the results for this test. From 0 to 2,002 seconds, the model construction cost estimated by the new progress indication method oscillated and differed notably from the real model construction cost most of the time. This difference led to inaccurate estimates of the model construction time left and the percentage of model construction work finished. After 2,002 seconds, the new progress indication method gave more accurate progress estimates. The new method reached the stage of giving relatively accurate estimates of the model construction time left much faster than the old method.
FIGURE 18.
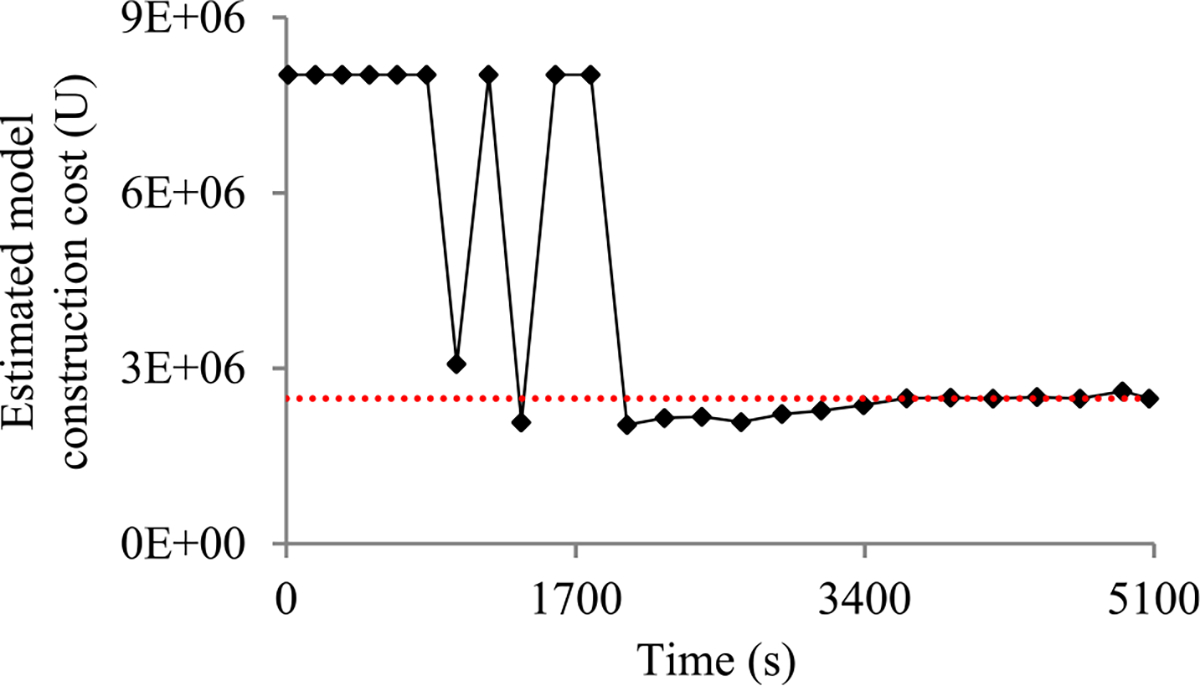
Model construction cost estimated over time (using Adam and applying an exponential decay method to the learning rate to construct GoogLeNet).
FIGURE 21.
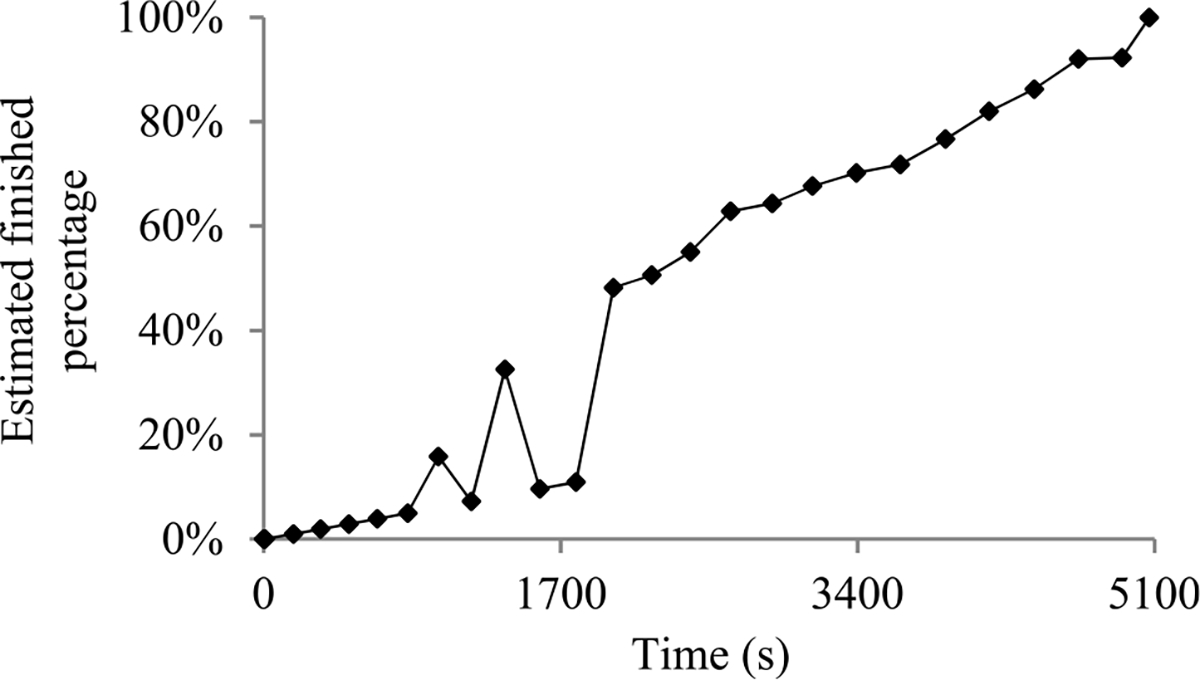
Finished percentage estimated over time (using Adam and applying an exponential decay method to the learning rate to construct GoogLeNet).
2). TEST RESULTS FOR CONSTRUCTING THE GRU MODEL
In the test, we used the RMSprop optimization algorithm and applied an exponential decay method to the learning rate to construct the GRU model. Fig. 22–25 depict the results for this test, showing that our new progress indication method gave decently accurate estimates during most of the model construction process. The new method reached the stage of giving relatively accurate estimates of the model construction time left much faster than the old method.
FIGURE 22.
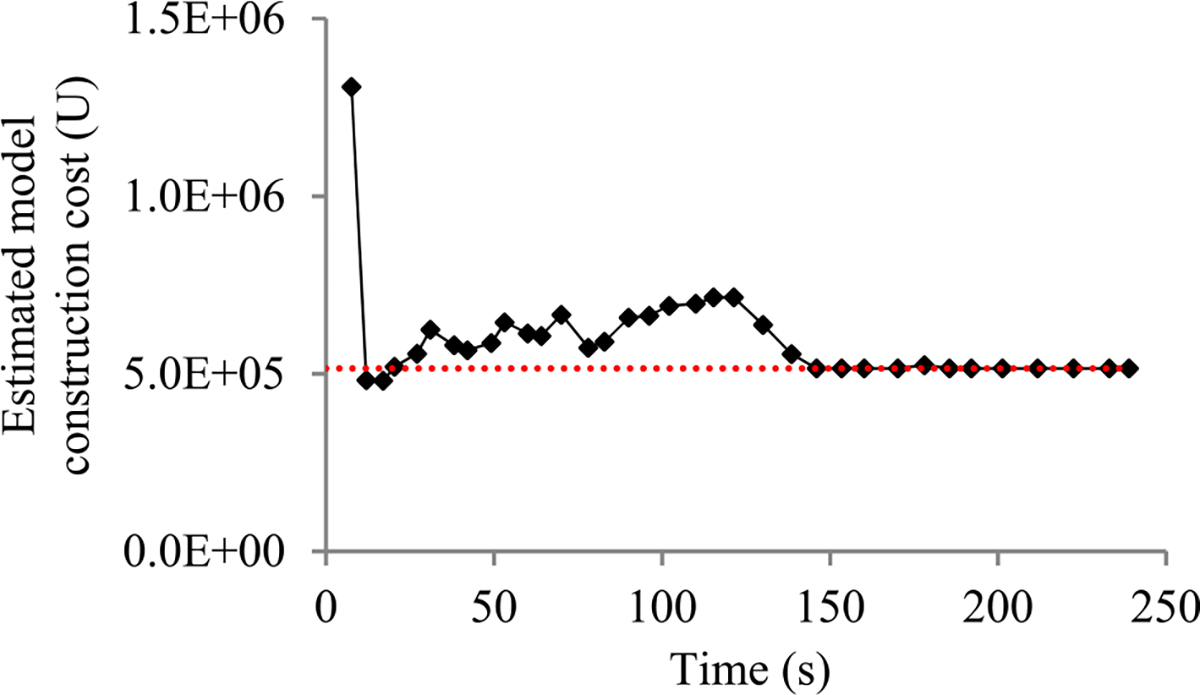
Model construction cost estimated over time (using RMSprop and applying an exponential decay method to the learning rate to construct the GRU model).
FIGURE 25.
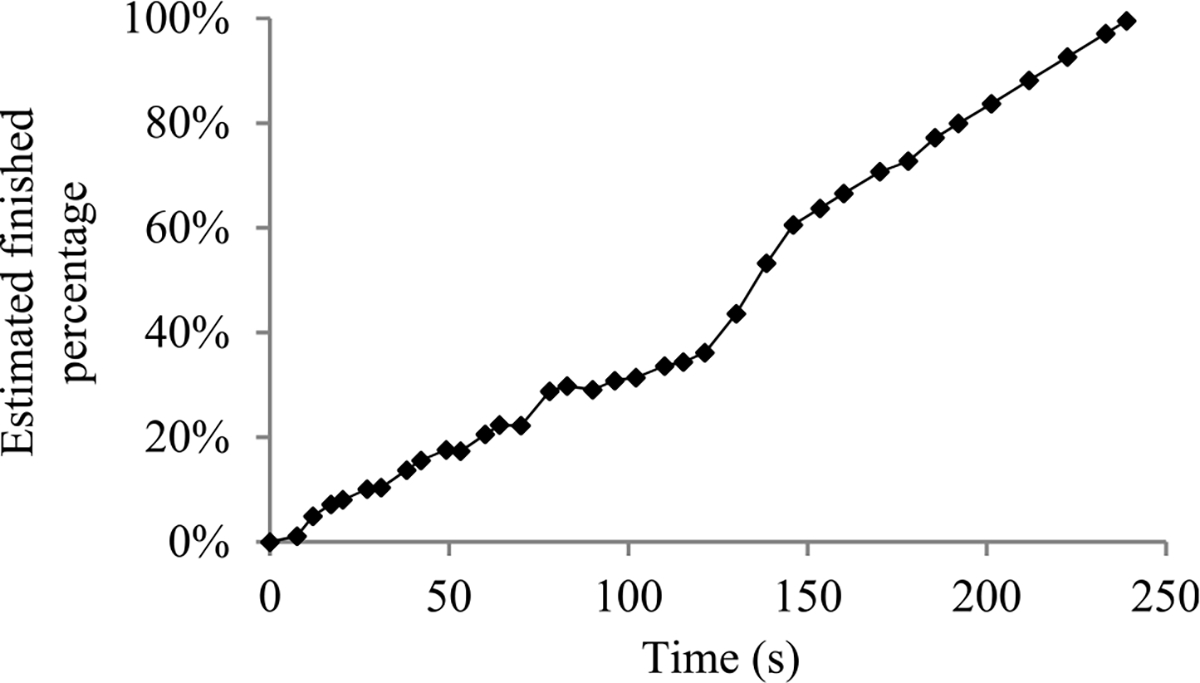
Finished percentage estimated over time (using RMSprop and applying an exponential decay method to the learning rate to construct the GRU model).
F. TEST RESULTS FOR APPLYING A STEP DECAY METHOD TO THE LEARNING RATE TO CONSTRUCT GOOGLENET
This section presents the test results for adopting the Adam optimization algorithm and applying a step decay method to the learning rate to construct GoogLeNet. We cut the learning rate from 10−3 to 10−4 at the start of the 64-th epoch, and subsequently to 10−5 at the start of the 115-th epoch. In the test, early stopping happened on the first piece of the validation curve. Fig. 26–30 present the test results, which are akin to those presented in Fig. 9–13.
FIGURE 26.
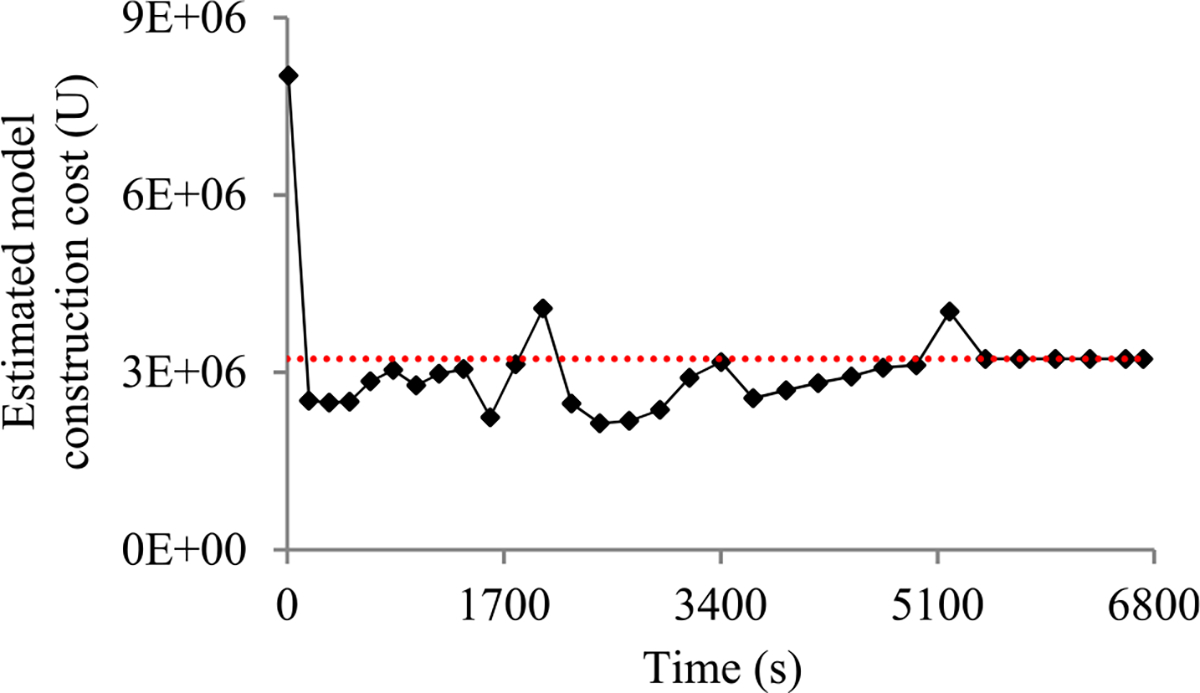
Model construction cost estimated over time (using Adam and applying a step decay method to the learning rate to construct GoogLeNet).
FIGURE 30.
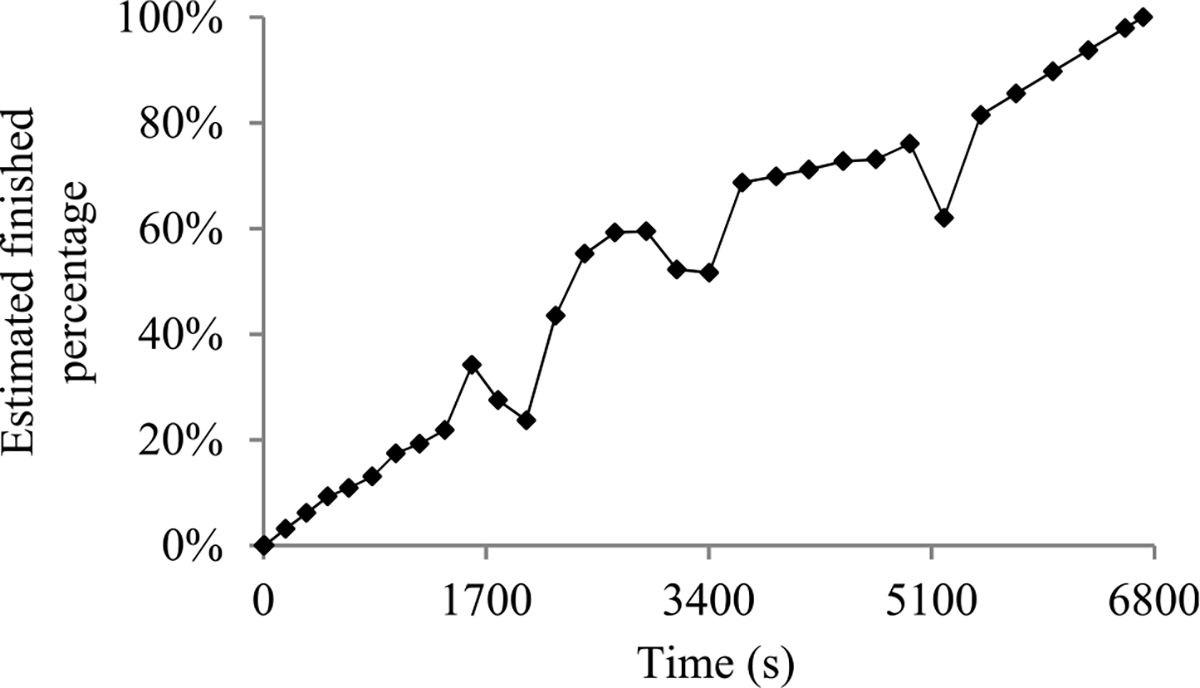
Finished percentage estimated over time (using Adam and applying a step decay method to the learning rate to construct GoogLeNet).
G. SUMMARY OF THE PERFORMANCE TEST RESULTS
In summary, our experiments show that compared with using our prior progress indication method, using the new method reduces the progress indicator’s prediction error. Moreover, the new method enables us to obtain relatively accurate progress estimates faster with a low overhead.
V. RELATED WORK
This section provides a brief review of the related work. Our prior paper [6] provides a detailed discussion of the related work.
A. SOPHISTICATED PROGRESS INDICATORS
Several research groups have proposed sophisticated progress indicators for static program analysis [39], software model checking [40], program compilation [41], database queries [7], [38], [42]–[44], MapReduce jobs [45], [46], subgraph queries [47], and automatic machine learning model selection [48], [49]. In addition, for construction machine learning models, we have created sophisticated progress indicators for random forest, decision tree, as well as neural network [6], [8], [50].
B. ESTIMATING THE CONSTRUCTION TIME OF DEEP LEARNING MODELS
To estimate the running time of an epoch before the construction of a deep learning model begins, Justus et al. [51] developed a meta learning approach that uses multiple features of the computing resources, the present deep learning model, and the training data set employed to construct another deep learning model. That approach projects neither the amount of time nor the count of epochs required to construct a deep learning model.
To project the amount of time required to construct a deep learning model before model construction begins, researchers have developed multiple methods including meta learning employing support vector regression [52], meta learning employing Multivariate Adaptive Regression Splines [53], meta learning employing polynomial regression [54], and Bayesian optimization [55]. The estimates given by these methods are not kept being refined, are often inaccurate, and can diverge greatly from the real model construction time on a loaded computer. In comparison, our progress indication method for deep learning model construction keeps refining its estimates and considers the load on the computer when projecting the model construction time left.
C. COMPLEXITY ANALYSIS FOR CONSTRUCTING NEURAL NETWORKS
Many researchers have studied the time complexity of constructing a neural network [56, Ch. 24], [57], [58]. However, the time complexity information gives no estimate of the model construction time on a loaded computer and is insufficient for us to develop progress indicators. Typically, time complexity considers neither data properties that affect the model construction cost nor the coefficients and the lower order terms required to predict the model construction cost. A good progress indicator should keep refining its estimated model construction cost during model construction.
D. RELATIONSHIP BETWEEN THE VARIANCE OF A MACHINE LEARNING MODEL’S ERROR RATE AND THE DATA SET SIZE
For a toy machine learning model not used in the real world, Hutter [59] derived the relationship between the variance of the model’s generalization error and the training set size. In comparison, for deep learning models used in the real world, we derive the relationship between the validation error’s variance and the validation set size.
VI. DIRECTIONS FOR FUTURE WORK
In this section, we outline some directions for future work.
This work does not give any upper bound for the progress indicator’s projection errors of the model construction cost. To derive such upper bounds in the future, we could employ an approach that is akin to the approach used by Chaudhuri et al. [60] for progress indication for executing database queries.
Both our prior work [8] and this work use the same single early stopping condition to do a case study to demonstrate that it is feasible to build sophisticated progress indicators for constructing deep learning models. Besides this early stopping condition, many other early stopping conditions exist [1], [61]–[63]. In the future, we plan to investigate how our present progress indication techniques work for some other popular early stopping conditions and whether our present techniques require any changes to work well for those conditions.
This work focuses on using deep learning for classification. Deep learning can also be used for regression. We could adopt the progress indication method given in our prior paper [8] to handle deep learning regression models. However, as pointed out earlier in this paper, this old method has a shortcoming due to the sparsity of validation points. In the future, we plan to investigate how to revise the new progress indication method given in this paper to handle deep learning regression models. When constructing a deep learning classification model, the validation error given the model’s generalization error follows a discrete distribution linked to a binomial distribution. This is used in Section III-D to derive the relationship between the random noise’s variance and the size of the actual validation set used at the validation point. In comparison, when constructing a deep learning regression model, the validation error given the model’s generalization error follows a continuous distribution. Accordingly, to enable the new progress indication method to handle regression models, we need to derive a different relationship between the random noise’s variance and the size of the actual validation set used at the validation point.
VII. CONCLUSION
In this paper, we propose a new progress indication method for constructing deep learning models that permits early stopping. By judiciously inserting extra validation points between the original validation points and revising the predicted model construction cost at both the original and the added validation points, this new method could address our prior method’s shortcoming of having a long delay in obtaining relatively accurate progress estimates for the model construction process. Our experimental results show that compared with using our prior method, using this new method not only greatly reduces the progress indicator’s prediction error of the model construction time left, but also enables us to obtain relatively accurate progress estimates faster.
Supplementary Material
FIGURE 19.
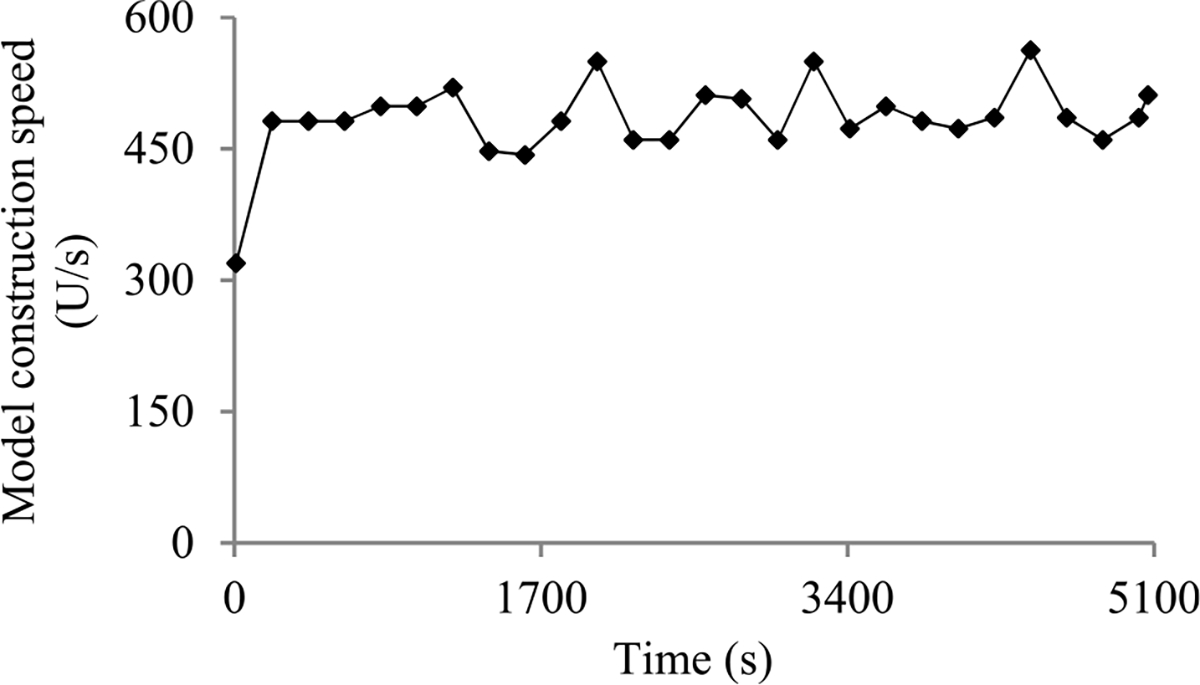
Model construction speed over time (using Adam and applying an exponential decay method to the learning rate to construct GoogLeNet).
FIGURE 20.
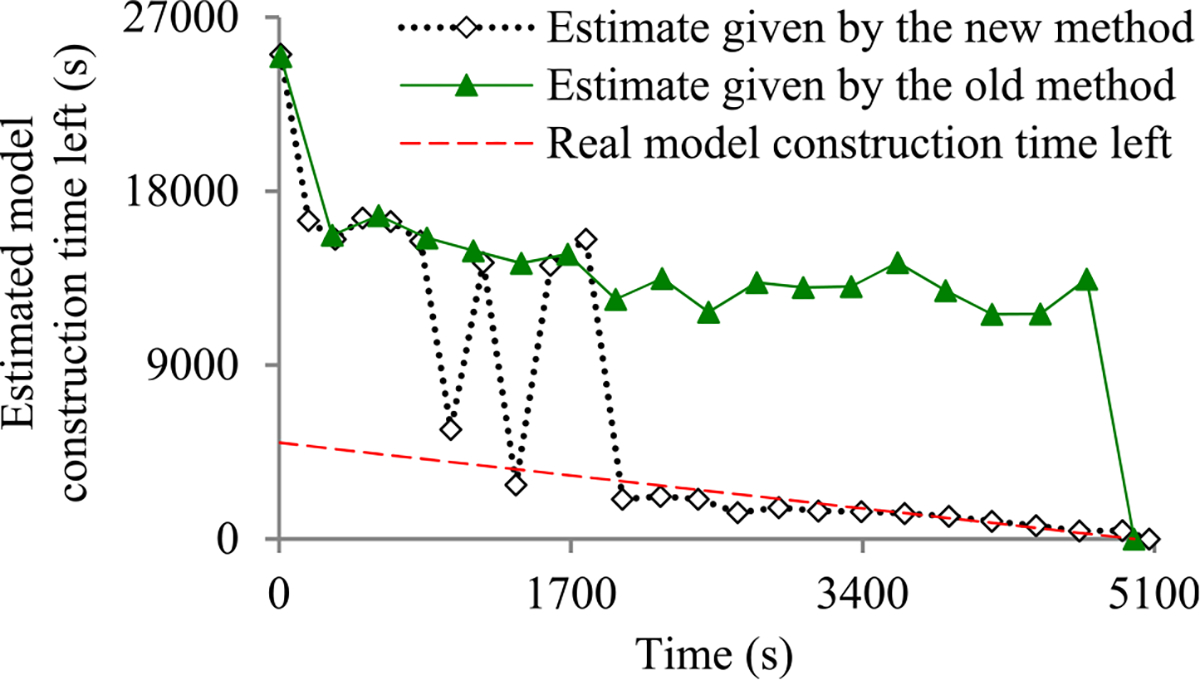
Estimated model construction time left (using Adam and applying an exponential decay method to the learning rate to construct GoogLeNet).
FIGURE 23.
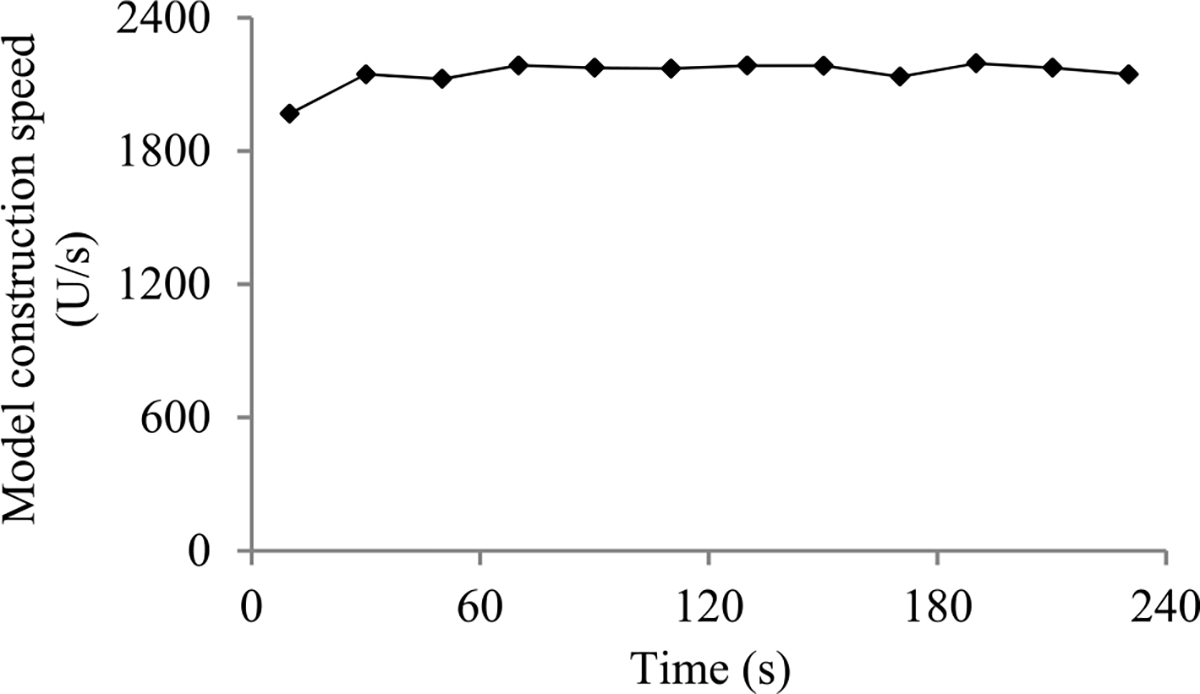
Model construction speed over time (using RMSprop and applying an exponential decay method to the learning rate to construct the GRU model).
FIGURE 24.
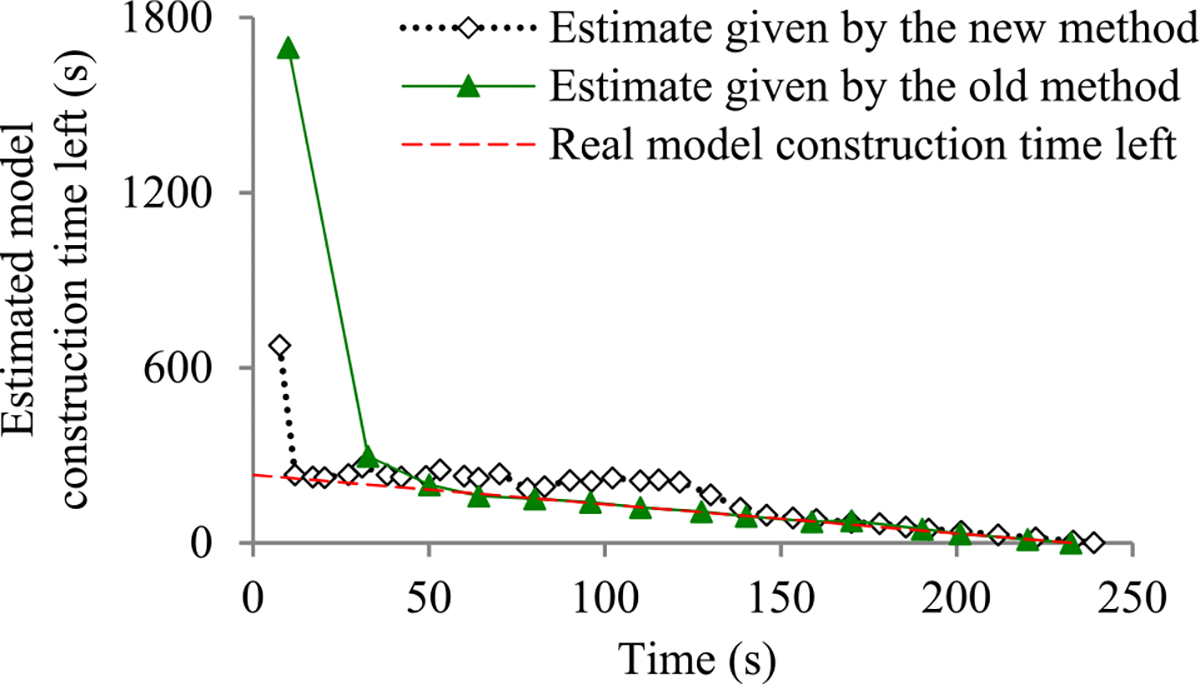
Estimated model construction time left (using RMSprop and applying an exponential decay method to the learning rate to construct the GRU model).
FIGURE 27.

Model construction speed over time (using Adam and applying a step decay method to the learning rate to construct GoogLeNet).
FIGURE 28.
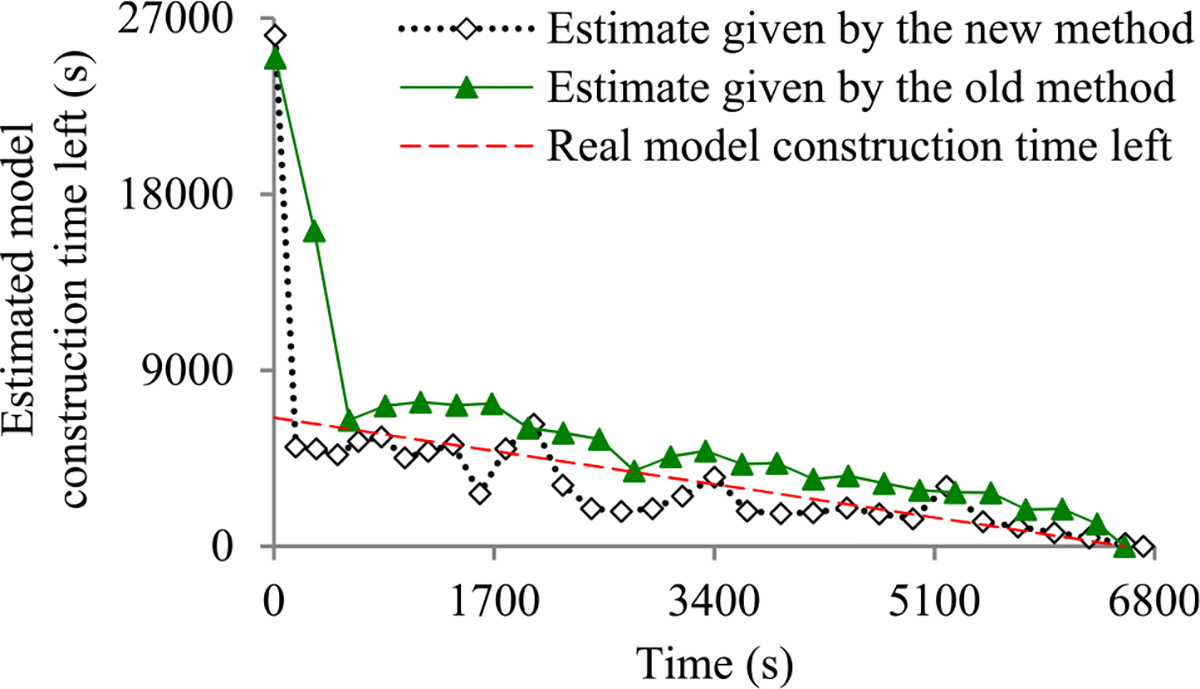
Estimated the model construction time left (using Adam and applying a step decay method to the learning rate to construct GoogLeNet).
FIGURE 29.
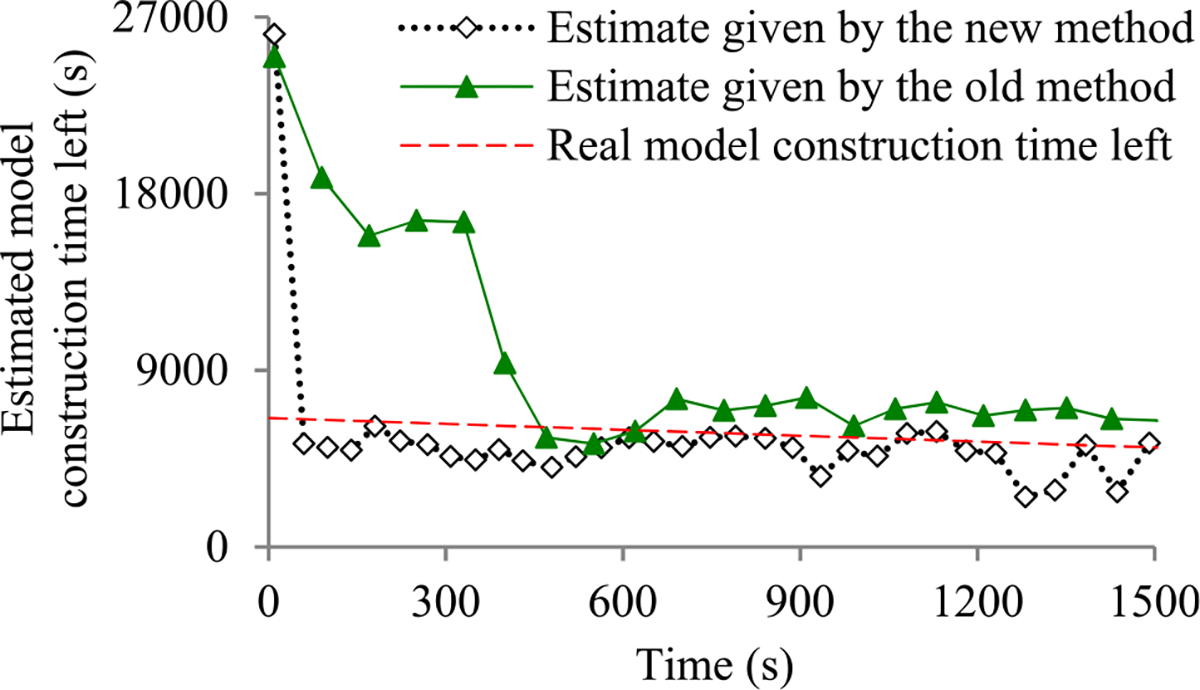
Estimate of the model construction time left at the early stage of model construction (using Adam and applying a step decay method to the learning rate to construct GoogLeNet).
ACKNOWLEDGMENT
The authors would like to thank Brian Kelly for useful discussions. The funders had no role in study design, data collection and analysis, decision to publish, or preparation of the manuscript.
The work of Gang Luo was supported in part by the National Heart, Lung, and Blood Institute of the National Institutes of Health under Award R01HL142503.
LIST OF SYMBOLS
- ⌈ ⌉
Ceiling function
- ⌊ ⌋
Floor function
- ⌊ ⌉
Nearest integer function
- a
Scaling factor used in the inverse power function
- b
Exponent used in the inverse power function
- bmax
Largest number of batches permitted to train the model
- bl
Lower bound of the validation error at any validation point
Estimate of bl
- bu
Upper bound of the validation error at any validation point
Estimate of bu
- B
Count of training instances used in every batch
- c
Bias term used in the inverse power function
- c 0
Model construction cost that has been incurred when we finish the work at the first original validation point, excluding the progress indicator’s overhead of calculating the validation errors at the added validation points
- cj
Count of validation instances that are misclassified by the model and in the actual validation set used at the j-th validation point
- cv
Cost to calculate the validation error at the first original validation point
- C
Upper threshold of the model construction cost that has been incurred when we finish the work at the fourth validation point
- ej
The model’s generalization error at the j-th validation point
Validation error of the model at the j-th validation point
Validation error of the model at the j-th original validation point
- f(q)
A function of q
- g
Count of batches of model construction between two successive original validation points
- h(n)
Present validation point’s sequence number on the present piece of the validation curve
- lj
Count of validation points that are on the j-th piece of the validation curve
- L(θ | y)
Likelihood function: the probability of y as a function of the parameters θ
- me
Largest number of epochs permitted to train the model
- n
Present validation point’s sequence number
- n 0
Count of validation points added before the first original validation point
- nj
Count of validation points added between the j-th and the (j + 1)-th original validation points
- nv
Count of original validation points required to train the model
- p
Patience
- pj
Percentage increase in the model construction cost that the progress indicator causes during the period from when model construction starts to the time we finish the work at the j-th original validation point
- P 1
Maximum allowed percentage increase in the model construction cost that the progress indicator causes during the period from when model construction starts to the time we finish the work at the first original validation point
- Pv
Maximum allowed percentage increase in the model construction cost that the progress indicator causes during the period from when model construction starts to the time we finish the work at the vmax-th original validation point
- q
Constant regulating the decay rate of nj (0 ≤ j ≤ vmax − 1) in the exponential decay schema
- r 0
Beginning learning rate adopted in the exponential decay method
- rj
Learning rate right before the j-th validation point
- s k−1
Sequence number of the final validation point that is on the prior piece of the validation curve
- U
Unit of work
- v k−1
At the final validation point appearing on the prior piece of the validation curve, the projected count of both original and added validation points required to train the model
- vmax
Largest number of original validation points permitted to train the model
- V
Count of data instances that are in the full validation set
- Vj
Count of data instances that are in the actual validation set used at the j-th validation point
- Vmin
Minimum number of data instances needed in the randomly sampled subset of the full validation set used at an added validation point
- V′
Uniform number of data instances that are in the randomly sampled subset of the full validation set used at each added validation point
- w
Count of validation points used to estimate a, b, c, and λ
- w′
Largest number of validation points permitted to estimate a, b, c, and λ
- xj
Normalized number of batches of model construction finished before the j-th validation point
- z
Constant regulating the decay rate of nj (0 ≤ j ≤ vmax − 1) in the linear decay schema
- α
The beta distribution’s first shape parameter
- β
The beta distribution’s second shape parameter
- B(α, β)
Normalization constant in the probability density function of the beta distribution
- δ
min_delta
- εj
Random noise at the j-th validation point
- λ
Ratio of the variance of the model’s generalization error to the square of the learning rate
- μj
Mean of the model’s generalization error at the j-th validation point
Mean of the beta distribution linking to the j-th validation point
Mean of a normal distribution linking to the j-th validation point
- ρ
Constant regulating the decay rate of the learning rate in the exponential decay method
Variance of the model’s generalization error at the j-th validation point
Variance of the beta distribution linking to the j-th validation point
Variance of a normal distribution linking to the j-th validation point
- τv
Minimum number of validation points required to employ the validation curve to re-estimate the count of original validation points required to train the model
- Φ()
Cumulative distribution function of the standard normal distribution
Biographies
QIFEI DONG received the B.S. degree in electrical engineering from Zhejiang University, Hangzhou, Zhejiang, China, in 2016, and the M.S. degree in electrical and computer engineering from the University of Michigan, Ann Arbor, MI, USA, in 2018. He is currently pursuing the Ph.D. degree in biomedical informatics and medical education with the University of Washington, Seattle, WA, USA.
Since 2018, he has been a Research Assistant with the University of Washington Clinical Learning, Evidence and Research Center for Musculoskeletal Disorders. His research interests include machine learning, computer vision, natural language processing, and clinical informatics.

XIAOYI ZHANG received the B.S. degree in applied mathematics and the B.A. degree in chemistry from Emory University, Atlanta, GA, USA, in 2018, and the M.S. degree in data science from New York University, New York, NY, USA, in 2020. She is currently pursuing the Ph.D. degree in biomedical and health informatics with the University of Washington, Seattle, WA, USA.
Since 2020, she has been a Research Assistant with the Veterans Affairs’ Health Services Research and Development Center of Innovation, Seattle. Her research interests include machine learning, data mining, natural language processing, and clinical informatics.
GANG LUO received the B.S. degree in computer science from Shanghai Jiaotong University, Shanghai, China, in 1998, and the Ph.D. degree in computer science from the University of Wisconsin–Madison, Madison, WI, USA, in 2004.
From 2004 to 2012, he was a Research Staff Member at the IBM Thomas J. Watson Research Center, Hawthorne, NY, USA. From 2012 to 2016, he was an Assistant Professor with the Department of Biomedical Informatics, University of Utah, Salt Lake City, UT, USA. He is currently a Professor with the Department of Biomedical Informatics and Medical Education, University of Washington, Seattle, WA, USA. He has authored over 80 articles. His research interests include machine learning, information retrieval, database systems, and health informatics.
Footnotes
The associate editor coordinating the review of this manuscript and approving it for publication was Anubha Gupta 0000-0002-7752-1926.
REFERENCES
- [1].Goodfellow I, Bengio Y, and Courville A, Deep Learning. Cambridge, MA, USA: MIT Press, 2016. [Google Scholar]
- [2].Sun C, Shrivastava A, Singh S, and Gupta A, “Revisiting unreasonable effectiveness of data in deep learning era,” in Proc. IEEE Int. Conf. Comput. Vis. (ICCV), Oct. 2017, pp. 843–852. [Google Scholar]
- [3].Hui J How to Scale the BERT Training With Nvidia GPUs? Nvidia. Accessed: Jan. 16, 2022. [Online]. Available: https://medium.com/nvidia-ai/how-to-scale-the-bert-training-with-nvidia-gpus-c1575e8eaf71 [Google Scholar]
- [4].Devlin J, Chang MW, Lee K, and Toutanova K, “BERT: Pre-training of deep bidirectional transformers for language understanding,” in Proc. NAACL-HLT, 2019, pp. 4171–4186. [Google Scholar]
- [5].Ni K, Pearce R, Boakye K, Van Essen B, Borth D, Chen B, and Wang E, “Large-scale deep learning on the YFCC100M dataset,” 2015, arXiv:1502.03409. [Google Scholar]
- [6].Luo G, “Toward a progress indicator for machine learning model building and data mining algorithm execution: A position paper,” ACM SIGKDD Explor. Newslett, vol. 19, no. 2, pp. 13–24, Dec. 2017. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [7].Luo G, Naughton JF, and Yu PS, “Multi-query SQL progress indicators,” in Proc. EDBT, 2006, pp. 921–941. [Google Scholar]
- [8].Dong Q and Luo G, “Progress indication for deep learning model training: A feasibility demonstration,” IEEE Access, vol. 8, pp. 79811–79843, 2020. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [9].Goyal P, Dollár P, Girshick R, Noordhuis P, Wesolowski L, Kyrola A, Tulloch A, Jia Y, and He K, “Accurate, large minibatch SGD: Training ImageNet in 1 hour,” 2017, arXiv:1706.02677. [Google Scholar]
- [10].Russakovsky O, Deng J, Su H, Krause J, Satheesh S, Ma S, Huang Z, Karpathy A, Khosla A, Bernstein M, Berg AC, and Li F-F, “ImageNet large scale visual recognition challenge,” Int. J. Comput. Vis, vol. 115, no. 3, pp. 211–252, Dec. 2015. [Google Scholar]
- [11].Tensorpack. GitHub. Accessed: Jan. 16, 2022. [Online]. Available: https://github.com/tensorpack/tensorpack [Google Scholar]
- [12].Mohri M, Rostamizadeh A, and Talwalkar A, Foundations of Machine Learning. Cambridge, MA, USA: MIT Press, 2018. [Google Scholar]
- [13].Rohatgi VK and Saleh AM, An Introduction to Probability and Statistics, 3rd ed. Hoboken, NJ, USA: Wiley, 2015. [Google Scholar]
- [14].Abadi M, Barham P, Chen J, Chen Z, and Davis A, “TensorFlow: A system for large-scale machine learning,” in Proc. OSDI, 2016, pp. 265–283. [Google Scholar]
- [15].EarlyStopping. TensorFlow. Accessed: Jan. 16, 2022. [Online]. Available: https://www.tensorflow.org/versions/r1.15/api_docs/python/tf/keras/callbacks/EarlyStopping [Google Scholar]
- [16].Hernandez D, Kaplan J, Henighan T, and McCandlish S, “Scaling laws for transfer,” 2021, arXiv:2102.01293. [Google Scholar]
- [17].Kaplan J, McCandlish S, Henighan T, Brown TB, Chess B, Child R, Gray S, Radford A, Wu J, and Amodei D, “Scaling laws for neural language models,” 2020, arXiv:2001.08361. [Google Scholar]
- [18].Henighan T, Kaplan J, Katz M, Chen M, Hesse C, Jackson J, Jun H, Brown TB, Dhariwal P, Gray S, Hallacy C, Mann B, Radford A, Ramesh A, Ryder N, Ziegler DM, Schulman J, Amodei D, and McCandlish S, “Scaling laws for autoregressive generative modeling,” 2020, arXiv:2010.14701. [Google Scholar]
- [19].Komatsuzaki A, “One epoch is all you need,” 2019, arXiv:1906.06669. [Google Scholar]
- [20].Intermediate Value Theorem. Wikipedia. Accessed: Jan. 16, 2022. [Online]. Available: https://en.wikipedia.org/wiki/Intermediate_value_theorem [Google Scholar]
- [21].Srivastava N, Hinton G, Krizhevsky A, Sutskever I, and Salakhutdinov R, “Dropout: A simple way to prevent neural networks from overfitting,” J. Mach. Learn. Res, vol. 15, pp. 1929–1958, Jun. 2014. [Google Scholar]
- [22].Normal Approximation to the Beta Distribution. VOSE. Accessed: Jan. 16, 2022. [Online]. Available: https://www.vosesoftware.com/riskwiki/NormalapproximationtotheBetadistribution.php [Google Scholar]
- [23].Nocedal J and Wright SJ, Numerical Optimization, 2nd ed. New York, NY, USA: Springer, 2006. [Google Scholar]
- [24].Artelys Knitro User’s Manual: Algorithms. Artelys Knitro. Accessed: Jan. 16, 2022. [Online]. Available: https://www.artelys.com/docs/knitro/2_userGuide/algorithms.html [Google Scholar]
- [25].The Most Advanced Solver for Nonlinear Optimization. Artelys Knitro. Accessed: Jan. 16, 2022. [Online]. Available: https://www.artelys.com/solvers/knitro [Google Scholar]
- [26].Artelys Knitro User’s Manual: Feasibility and Infeasibility. Artelys Knitro. Accessed: Jan. 16, 2022. [Online]. Available: https://www.artelys.com/docs/knitro/2_userGuide/feasibility.html [Google Scholar]
- [27].Purushotham S, Meng C, Che Z, and Liu Y, “Benchmarking deep learning models on large healthcare datasets,” J. Biomed. Informat, vol. 83, pp. 112–134, Jul. 2018. [DOI] [PubMed] [Google Scholar]
- [28].Szegedy C, Liu W, Jia Y, Sermanet P, Reed SE, Anguelov D, Erhan D, Vanhoucke V, and Rabinovich A, “Going deeper with convolutions,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit., Jun. 2015, pp. 1–9. [Google Scholar]
- [29].Ruder S, “An overview of gradient descent optimization algorithms,” 2016, arXiv:1609.04747. [Google Scholar]
- [30].Bottou L, “Large-scale machine learning with stochastic gradient descent,” in Proc. COMPSTAT, 2010, pp. 177–186. [Google Scholar]
- [31].Duchi J, Hazan E, and Singer Y, “Adaptive subgradient methods for online learning and stochastic optimization,” J. Mach. Learn. Res, vol. 12, pp. 2121–2159, Feb. 2011. [Google Scholar]
- [32].Kingma DP and Ba J, “Adam: A method for stochastic optimization,” in Proc. ICLR, 2015, pp. 1–15. [Google Scholar]
- [33].Dong Q, Zhang X, and Luo G Improving the Accuracy of Progress Indication for Constructing Deep Learning Models. Accessed: Apr. 28, 2022. [Online]. Available: https://pages.cs.wisc.edu/~gangluo/deep_learning_PI2_full_version.pdf [DOI] [PMC free article] [PubMed]
- [34].Krizhevsky A, “Learning multiple layers of features from tiny images,” M.S. thesis, Dept. Comput. Sci., Univ. Toronto, Toronto, ON, Canada, 2009. [Google Scholar]
- [35].Johnson AEW, Pollard TJ, Shen L, Lehman L-W-H, Feng M, Ghassemi M, Moody B, Szolovits P, Anthony Celi L, and Mark RG, “MIMIC-III, a freely accessible critical care database,” Scientific Data, vol. 3, no. 1, May 2016, Art. no. 160035. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [36].GoogLeNet-Inception. Accessed: Jan. 16, 2022. [Online]. Available: https://github.com/conan7882/GoogLeNet-Inception
- [37].Benchmarking_DL_MIMICIII. Accessed: Jan. 16, 2022. [Online]. Available: https://github.com/USC-Melady/Benchmarking_DL_MIMICIII
- [38].Chaudhuri S, Narasayya V, and Ramamurthy R, “Estimating progress of execution for SQL queries,” in Proc. ACM SIGMOD Int. Conf. Manage. Data (SIGMOD), 2004, pp. 803–814. [Google Scholar]
- [39].Lee W, Oh H, and Yi K, “A progress bar for static analyzers,” in Proc. SAS, 2014, pp. 184–200. [Google Scholar]
- [40].Wang K, Converse H, Gligoric M, Misailovic S, and Khurshid S, “A progress bar for the JPF search using program executions,” in Proc. Java PathFinder Workshop ESEC/FSE, 2018, pp. 1–5. [Google Scholar]
- [41].Luo G, Chen T, and Yu H, “Toward a progress indicator for program compilation,” Softw., Pract. Exper, vol. 37, no. 9, pp. 909–933, Jul. 2007. [Google Scholar]
- [42].Lee K, König AC, Narasayya V, Ding B, Chaudhuri S, Ellwein B, Eksarevskiy A, Kohli M, Wyant J, Prakash P, Nehme R, Li J, and Naughton J, “Operator and query progress estimation in Microsoft SQL server live query statistics,” in Proc. Int. Conf. Manage. Data, Jun. 2016, pp. 1753–1764. [Google Scholar]
- [43].Luo G, Naughton JF, Ellmann CJ, and Watzke MW, “Increasing the accuracy and coverage of SQL progress indicators,” in Proc. 21st Int. Conf. Data Eng. (ICDE), Apr. 2005, pp. 853–864. [Google Scholar]
- [44].Luo G, Naughton JF, Ellmann CJ, and Watzke MW, “Toward a progress indicator for database queries,” in Proc. ACM SIGMOD Int. Conf. Manage. Data (SIGMOD), 2004, pp. 791–802. [Google Scholar]
- [45].Morton K, Balazinska M, and Grossman D, “ParaTimer: A progress indicator for MapReduce DAGs,” in Proc. ACM SIGMOD Int. Conf. Manage. Data, 2010, pp. 507–518. [Google Scholar]
- [46].Morton K, Friesen A, Balazinska M, and Grossman D, “Estimating the progress of MapReduce pipelines,” in Proc. IEEE 26th Int. Conf. Data Eng. (ICDE), Mar. 2010, pp. 681–684. [Google Scholar]
- [47].Xie X, Fan Z, Choi B, Yi P, Bhowmick SS, and Zhou S, “PIGEON: Progress indicator for subgraph queries,” in Proc. IEEE 31st Int. Conf. Data Eng., Apr. 2015, pp. 1492–1495. [Google Scholar]
- [48].Luo G, “PredicT-ML: A tool for automating machine learning model building with big clinical data,” Health Inf. Sci. Syst, vol. 4, no. 1, p. 5, Dec. 2016. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [49].Luo G, Stone BL, Johnson MD, Tarczy-Hornoch P, Wilcox AB, Mooney SD, Sheng X, Haug PJ, and Nkoy FL, “Automating construction of machine learning models with clinical big data: Proposal rationale and methods,” JMIR Res. Protocols, vol. 6, no. 8, p. e175, Aug. 2017. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [50].Luo G, “Progress indication for machine learning model building: A feasibility demonstration,” ACM SIGKDD Explor. Newslett, vol. 20, no. 2, pp. 1–12, Dec. 2018. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [51].Justus D, Brennan J, Bonner S, and McGough AS, “Predicting the computational cost of deep learning models,” in Proc. BigData, 2018, pp. 3873–3882. [Google Scholar]
- [52].Reif M, Shafait F, and Dengel A, “Prediction of classifier training time including parameter optimization,” in Proc. KI, 2011, pp. 260–271. [Google Scholar]
- [53].Doan T and Kalita J, “Predicting run time of classification algorithms using meta-learning,” Int. J. Mach. Learn. Cybern, vol. 8, no. 6, pp. 1929–1943, 2017. [Google Scholar]
- [54].Yang C, Akimoto Y, Kim DW, and Udell M, “OBOE: Collaborative filtering for AutoML model selection,” in Proc. 25th ACM SIGKDD Int. Conf. Knowl. Discovery Data Mining, 2019, pp. 1173–1183. [Google Scholar]
- [55].Snoek J, Larochelle H, and Adams RP, “Practical Bayesian optimization of machine learning algorithms,” in Proc. NIPS, 2012, pp. 2960–2968. [Google Scholar]
- [56].Anthony M and Bartlett PL, Neural Network Learning: Theoretical Foundations. New York, NY, USA: Cambridge Univ. Press, 2002. [Google Scholar]
- [57].Fredenslund K Computational Complexity of Neural Networks. Accessed: Jan. 16, 2022. [Online]. Available: https://kasperfred.com/series/introduction-to-neural-networks/computational-complexity-of-neural-networks
- [58].Livni R, Shalev-Shwartz S, and Shamir O, “On the computational efficiency of training neural networks,” in Proc. NIPS, 2014, pp. 855–863. [Google Scholar]
- [59].Hutter M, “Learning curve theory,” 2021, arXiv:2102.04074. [Google Scholar]
- [60].Chaudhuri S, Kaushik R, and Ramamurthy R, “When can we trust progress estimators for SQL queries?” in Proc. ACM SIGMOD Int. Conf. Manage. Data (SIGMOD), 2005, pp. 575–586. [Google Scholar]
- [61].Prechelt L, “Early stopping-but when?” in Neural Networks: Tricks of the Trade. Berlin, Germany: Springer, 1996, pp. 55–69. [Google Scholar]
- [62].Duvenaud D, Maclaurin D, and Adams RP, “Early stopping as nonparametric variational inference,” in Proc. AISTATS, 2016, pp. 1070–1077. [Google Scholar]
- [63].Mahsereci M, Balles L, Lassner C, and Hennig P, “Early stopping without a validation set,” 2017, arXiv:1703.09580. [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.