

Abstract
The use of information technology in the academic environment has grown. Building different didactic techniques to help students learn and practice with Information Technology (IT) resources is common. However, applying these techniques does not necessarily mean that students may acquire knowledge. The differential idea of this work is to create an approach in which students are protagonists and not just absorbers of IT. Based on this perspective, we applied a Gestalt approach to assist students in practicing these technological resources. They produce new hardware and software tools during classes based on their personal needs and worldviews. We analyzed applications of this novel way of computer science teaching in three different schools. It was possible to observe greater motivation from the students to experience new knowledge from technological resources. The common aspect was that solutions were conceived and developed from students’ needs. The development followed a Gestalt approach, which combines the idea of form and imagination. Thus, with this approach, reactivity towards IT was reduced. It helped construct technological tools to acquire propaedeutic knowledge.
Keywords: Technology, Gestalt, Education
Introduction
Information Technology (IT) has increasingly produced teaching resources for classroom applications. The use of educational applications, digital games, or e-learning software has grown throughout this current century. Many of them are resources developed specifically for educational environments (Ferreira, 2012; Huang et al., 2019; Songkram & Chootongchai, 2020; Sarı et al., 2022). One of the goals of this initial contact with IT in schools is to ensure that students at the elementary level have access to an environment that helps them adjust to the world of Industry 4.0 (Grenčíková et al., 2021; Helsa et al., 2019; Silva et al., 2021). In this perspective, IT with robotics and programming is presented with resources to learn the technologies and new lines of knowledge, such as mathematics and history (Grenčíková et al., 2021).
It must be considered that the later a person learns about this technological world of Industry 4.0, the more marginal this new labor market will be (Helsa et al., 2019; Silva et al., 2021). The introduction of these resources most often follows a standard teaching methodology. In these cases, students are introduced to the resources without adequate time to be inserted into the school context (Bernacki et al., 2020). Often, it is not perceived to what extent the knowledge or lack of understanding of IT is connected to the universe outside the classroom of these students (Grenčíková et al., 2021).
Students are generally introduced to these resources without fully explaining the teaching methods and models. It is assumed that such students already know everything about IT elements, which is misleading. There is a certain “obliviousness” to the problems of digital inclusion. Even in the most affluent countries, not all students have access to technologies capable of working with these educational resources (Bernacki et al., 2020). There are also problems with time invested and spent to train students to use the tools’ resources. Such training time also includes what is supported for the educators who will use these tools, occurring in an adaptation phase, both for students and teachers or applicators (Badeleh, 2021).
E-learning is an example that requires the school to have a stable infrastructure to handle all accesses of students and educators. Other problems are (i) the inability to produce content adapted to the new form of knowledge; (ii) the mode of use, whether synchronous or asynchronous; (iii) how long this mode of service will take; and (iv) how to adapt each way to the target audience (Jati et al., 2021). There is a need to adapt administrative processes to work with introducing this kind of digital culture. It makes using IT resources more laborious because no matter how much focus there is to deploy this educational environment effectively (Huang et al., 2019).
Multiple reactivities can range from a lack of interest in using the resource to even abandoning virtual classes (Joshi et al., 2010; Melo et al., 2021). However, this does not mean that there are no successful deployments. Still, there are questions to be examined. Are these IT environments seen as part of the actual lives of these students, or do these resources “consume” the educational space, obstructing creativity in learning?
Objectives
This study intends to present a different way of introducing IT into the classroom, applied in practice in an educational environment, in classes of primary level students (around 12 to 18 years old), and their schools. Although it is not an educational methodology, the proposed didactics, which use IT through robotics or programming, aim to be non-invasive. Besides, it intends not to cause an abrupt cultural change and reduce the reactivity in using IT resources in classrooms. It works on connecting the IT resources-Robotics/Programming with the students’ out-of-class worldview and their personal and collective perspectives.
Instead of suddenly inserting IT into the classroom, we try to get students to “let their imagination run wild”. They are instigated to give a new way — their way — to discover and experience new concepts using IT resources. Observing what they know or would like to know about IT using robotics and programming was essential. Such approach can be helpful for students with different educational needs (Erdem, 2017; Olakanmi et al., 2020).
Particularly, this view explores the idea that robotics (and its coupled programs) is part of the POP world of these students. It is seen in cartoons (from The Jetsons to Steven Universe), movies, heroes or villains of comic books, and music. Even those living in adverse socioeconomic conditions have heard of or been aware of some hero robots, such as Transformers. Thanks to media marketing, these students know about robots and the programs that control them.
One concept applied was to seek the worldview of these students regarding the world of IT. For this application, it was important to make the students present their common ways and visions of what they understand about IT. Before introducing an IT resource, they may consider what IT can offer them in the classroom. It enables them to build their perspective about this universe.
For this study, Gestaltism (Greenwood, 2020) was perceived as knowledge to help build new ways to discover, experiment, or create educational content. It adds different worldviews about a theme (in this case, IT). It helped to capture the development of learning environments more connected to the universe of these students. The Gestalt Approach strand values subjectivity, uniqueness, responsibility, and experience. It focuses on the perception of existence in front of a holistic environment. It was not the objective of the study to propose a hermetic methodology to apply and verify perceptions of the developed projects.
The Gestalt approach was chosen not to be bound by closed “liturgies” for an educational method. It was used to obtain the students’ perceptions and worldviews. As the focus of this approach is on form, participation, and the sum of perceptions, unformatted conversations within the classroom were used to work on the development of educational resources with robotics. It can be seen as equivalent to a qualitative approach for this kind of didactics.
This way of capturing these perceptions comes from the students and teachers involved in the development processes of the new IT resources. They valued spontaneity so that it was possible to scrutinize the scope, influence, and curiosity regarding robotics and IT, from their point of view, without a strictly academic view. An attempt was made to shape these spontaneous insights into the topic by collecting these informal observations.
Organization
This research environment focused on a set of schools in Rio de Janeiro (Brazil) in classes from 5th to 9th grades (de Praga Baião & Batista, 2016). It has been ongoing research since 2013. One of the authors has worked in these teaching units, facilitating information collection and the application’s design.
The formatting of what was observed followed one of the maxims of Gestaltism, which states that the parts’ total union makes a fundamental difference from a simple sum. By building this new form, it was possible to introduce these students to the vision of IT with robotics and programming. Thus, the product, created and driven by the students’ perceptions, became a standard component in the classroom and a friendly pedagogical resource created, admitted, and planned by them, reducing reactivities.
The idea is to verify how much the Gestalt approach can help produce educational resources associated with IT. As this study deals with creative actions, the proposal uses the IT area that most deals with creations that use imagination and that can be materialized: robotics.
Monsores et al. (2020) show an example of the experience of using the gestalt approach to construct educational resources using IT principles. It is only a part of the biggest educational project that uses robotic, gestalt approach and programming to production, by the own students, educational resources.
This study shows the application of this approach to building IT-based teaching resources. It is separated into an introduction, an overview of Gestaltism, robotics, and programming, a review of case studies of the application of the Gestalt approach in other educational situations, and the application of the didactics proposed in this study in different classrooms, and a conclusion.
Background
About Gestaltism
Although the terms are not precisely synonymous, Gestaltism (or Gestalt Psychology, or Gestalt Approach) privileges the notion of configuration or form, understanding the phenomenon as an organized totality and not as a mere sum of elements. It is a theory of psychology that emphasizes perception and postulates that the principle of brain functioning is holistic, parallel, and analogical, with personal trends (Greenwood, 2020).
It also focuses on the idea that human perception is not only observing and interpreting what is contained in the universe around us but is also influenced by several particular and group motivations and expectations (Greenwood, 2020). Therefore, its focus is on the idea of an active, relational subject and not simply a receiver of information so that the teaching/learning relationship makes all the difference.
Gestaltism did not emerge as a pedagogical method such as constructivism (Ariza & Baez, 2022; Asoodar et al., 2014), Paulo Freire’s pedagogy (Giroux, 2010), or Skinner’s behaviorism (Watters, 2021). It is a theory of psychology that emerges as a reaction to associationism, combating the idea of fragmentation of perception. It has been applied in various scientific areas, from economics (Beisser, 1970), to theology (Thomas et al., 2022), communication and advertising, and the arts in general (Parsons et al., 2020).
However, few works present it as a model for creating new educational practices in schools. The example of Pill & Hyndman (2018) gives Gestaltism and its applicability in the school setting, highlighting the value of this approach is spontaneous learning. By conceiving perception as a dynamic and integrated process, Gestaltism can provide education resources from actions of creativity (Monsores et al., 2020).
About robotics & programming
A robot is a term used for the products of robotics. This field aims to study and develop automated or autonomous technological tools to accomplish specific tasks through specific programming. The first mention of the term robot appeared many years ago in a play produced by Capek (1990) about an automaton mechanism that performed specific tasks. Today, the field of robotics draws on knowledge of mechanics, electronics, computing, mathematics, physics, and automation (Niku, 2020).
A robotic system is composed of mechanical parts manipulated by integrated circuits (microcontrollers). They are programmed to interpret signals from actuators, motors, and sensors and produce movements or automatic responses to stimuli (Niku, 2020). It aims to produce autonomous tools to assist or replace more complex human tasks. It includes constructions, deactivating bombs or mines in war zones (Mukh, 2021), performing geoprocessing (Hanisch et al., 2019), assisting in medical operations (AlQarzaie & AlEnezi, 2022), and other tasks. Figure 1 presents some models of robots or robotic tools associated with education.
Fig. 1.

Examples of different types of robotic resources. Source: authors’ photo library
Today, there is greater popularization and better access to instruments capable of developing these tools due to the emergence of lower-cost interfaces composed of cheaper microcontrollers and an entirely didactic apparatus for accessing and programming their functions. Among these new interfaces are the boards of the Arduino family (Chang & Chen, 2020) or Raspberry (Kingstan & Suchithra, 2015), which allow people without prior familiarity with this field of technology to have the ability to develop prototypes of mobile robots or automation, much more quickly.
Most robotic instruments work with more sophisticated programming algorithms, such as Deep Learning or Fuzzy Logic. They monitor specific situations, such as watching air quality in large cities, environmental sensing, and checking for disease outbreaks, among other applications requiring more robust programming. Among the programming languages that work with robotics, we have C, java, C++, phyton, and each microcontroller’s assemblies (Kim et al., 2022; Al-Shanoon & Lang, 2022). Regarding the application of robots and programming in an educational environment, there is the work of Monsores et al. (2020), in which a methodology based on Gestaltism is emphasized to build educational robotic resources. Besides, the result of Sisman et al. (2021) also shows the application of constructivism to work on the effects of robotics training on children’s spatial ability and attitude toward collaborating in science, technology, engineering, and mathematics (STEM).
In work by Mahdi et al. (2021), robotics and educational programming are analyzed from the teacher’s point of view, looking at how the influence of the IT tool affects a new education perspective. Panskyi & Rowińska (2021) work presents an innovative approach to organizing the out-of-school teaching of programming in middle childhood. Yepes et al. (2022) show how UAVs can assist in teaching engineering subjects, indicating that the support of robotic resources helps fix diverse learning.
Gestalt, robotics and programming: Practices in the classroom
It has chosen robotics as an area in which the use of the gestalt approach would be appropriate to learn IT since it is an area in which students can materialize, in a concrete way, the resources they have developed. It is essential to point out that the Gestalt approach does not deal with knowledge absorption as in constructivism. The latter is one of the widely-adopted teaching methods, whereas the former emphasizes the form of each one’s perception of the world (Pill & Hyndman, 2018; Skottun & Krüger, 2021).
The beginning of applying the educational method using Gestaltism with robotics and programming, with a bias towards the production of pedagogical and didactic resources to awaken interests in new knowledge, has as its starting point the obtaining of the students’ particular visions about IT. One motivation issue for choosing robotics as the prominent IT area in this study was that by studying robotics, students could concretely visualize an object with form, and Gestalt Therapy is the psychology of form (Monsores et al., 2020; Skottun & Krüger, 2021).
By encouraging students to use their imagination and creativity to produce an IT resource that has a form that can be touched and even modified, the association with Gestalt Therapy is seamless. The didactic work using this application of psychology results in a comfortable learning environment. The motivation is to give shape to the senses of imagination and creativity in an accessible point of view, without any hermetic methodological formatting, to develop and create their resources, plan how they will be used and for what they will be used (Thomas et al., 2022; Skottun & Krüger, 2021).
In this type of practice, the teachers/researchers conduct and organize the meetings and activities. Still, they do not induce or influence the students, who are the main protagonists of the activities and the influencing agents for the classes (Greenwood, 2020; Skottun & Krüger, 2021).
Method
With Gestaltism, the scientific method should be considered not to be a closed or hermetic measurement (such as simple statistics from the data collected) because there is no way to value or measure imagination or creativity numerically. However, the results’ analysis focused on what was produced by the students and the connection to the presented problem.
Gestaltism does not apply algorithmic steps or tables of measuring values because the emphasis is on giving free form to the object of the problem. Therefore, applying this practice with robotics used subjective extractions, fruits of practical actions, like those obtained in qualitative research.
The didactic approach begins with the teachers/researchers in the classroom, fostering the discussion about IT with robotics and programming and creating didactic resources. Without any value judgment always seeks, the common perceptions are cosmovision of the students about the theme, without letting academic elements influence the discussion.
After this step, we try to highlight among the students who present themselves with the most significant connection, even with an abstract view, with computer science, realizing that these connections are part of their personal views outside the classroom or in daily life. Once we have verified which students are more connected with robotics and programming, we establish these visions as a starting point for further work. The next step is to get the perceptions about robotics and programming with questions such as:
“How do you think a robot works?”;
“Can you imagine a robot that helps you in the classroom?”;
“What should this robot do?”;
“What kind of robot would you like to build for your class?”;
“Do you know what is a computer program and how it relates to robots?”
From the answers provided, the essence of these worldviews is collected. The questions should be asked in simple language, close to the culture of the target students, which depends on each class, region, educational needs, and schooling. These questions motivate them about robots and programming and how they would like these elements to help them build their learning resources. In addition, the answers might point to the various abstractions, enabling a connection with the idea of the psychology of form, capturing each part (coming from each student) to create different solutions but adherent to the expectations of the collective.
These questions can also be extracted from the students’ need to develop the defined robotic and programming resources to start the robotics, simple programming, and electronics workshops. The students, identified with an IT connection, are placed as monitors for the others in the class. Being part of the class is not considered an invasion of the school space.
It is noteworthy that, in the application of Gestaltism and IT, robotics and programming are not curriculum subjects. They are motivating elements, a stimulus, and a new space to be investigated so that students can be free from any curricular “weight” on technological knowledge (such as grades and homework).
In this way, they are encouraged to act voluntarily to think of IT as a source of help in discovering and experimenting with new knowledge. The teachers and researchers in the classes play the role of passive participants, or organizers, without inducing or leading (actively) the discussions.
The idea is that their interference is minimal, aiming only to preserve the environment of respect and collectivity, preventing any value judgment from being made on an idea or a heated discussion. However, there is no direct interference during the discussions among the students. As can be observed, the approach is carried out informally, without following a script that cannot be modified, the steps are presented as suggestions to reach the desired target, but they are not fixed. It is essential to highlight that what matters is the valorization of imagination, which provides substantial elements for the idea of shape in Gestaltism.
Proof of concept usage
One result was the fruit of imagination and varying perceptions described by the proposed method. The data collected gave concrete meaning to the study. The assignments were linked to the themes in which students were engaged. They were based on the class, the level of education, the age range of the students involved per class, and the time available to develop the project.
It is noteworthy that until the beginning of the application of the approach, all the students’ knowledge about robotics or programming was very superficial, and none of them had had any class or training in aspects of IT. This study followed the application of this didactic in six elementary school classes, from three different schools, two public and one private, from the years 2018 to 2021. The follow-up years (2020 and 2021) were virtual due to the suspension of in-person classes in Rio de Janeiro by the pandemic of COVID-19. These schools and classes were selected to apply this didactic because they have already been part of other continued work by the research team of this project since 2013.
The first two classes (T1 and T2) were from one of the public schools (EP1). They were 9th-grade classes, and this didactic was applied throughout 2018 for T1 and 2019 for T2. Both had students ranging in age from 14 to 17.
In T1, the students proposed a mobile robotic resource (as seen in Fig. 2) to help them in a game where answers to previous questions stimulate the robot’s movement, whether the answer is correct or backward if the answer is wrong. The shape, robot characteristics, solutions precision, programming, and the knowledge to be checked by the robotic resource, were all defined, planned, and developed by the T1 students. Thus, they learned more about robotics while growing in the propaedeutic disciplines chosen by them to be the object of the game verification with the resource, in this case, native language and mathematics.
Fig. 2.

Mobile robot, created by T1-EP1 students (a) and his AppInventor code, made by students (b). Source: Author’s photo library
T1 had 42 students, 17 of whom were connected to the use of robotics and were the ones who helped design the robot and worked as monitors. Everyone in the class chose the theme; 34 students said the robot should work with the native language and notions of mathematics, and eight could not answer.
In class T2 of EP1, also in 9th grade, the students, who were 36 in total, 14 of whom had a more intimate experience with IT, proposed a robot that could follow music rhythms, making the robot dance. The model built was like the 2019 robot, altering the programming and inserting complete movement commands. The main screen to access the application developed in AppInventor can be seen in Fig. 3. The idea of these students was to manually make the robot move according to the rhythm of the song, i.e., they would sing the music, and one of them would carry the robot according to the rhythm picked up.
Fig. 3.

Example of the AppInventor application that T2-EP1 students made to get the robot to the Chorinho (Grossi, 2006) rhythm. The connection to the robot was through Bluetooth. Source: Author’s photo library
The rhythm chosen by T2 was local, characteristic of the city, called Chorinho (Grossi, 2006), and the robot was used to help the students identify the music and the rhythm.
Classes T3, T4 and T5 were from the other public school (EP2), in which the didactics were applied in the years 2019, 2020, and 2021 respectively. They were also 9th-grade classes, with students between 14 and 19 years old. In the case of T3, it was used to program a robot that could work with art based on movement stimuli.
Thus, in this class, the area experimented with was graphic art, in which, with the help of the robot, the students could exercise themselves in technical and free drawings. The model of the robot developed and used by them can be seen in Fig. 4.
Fig. 4.
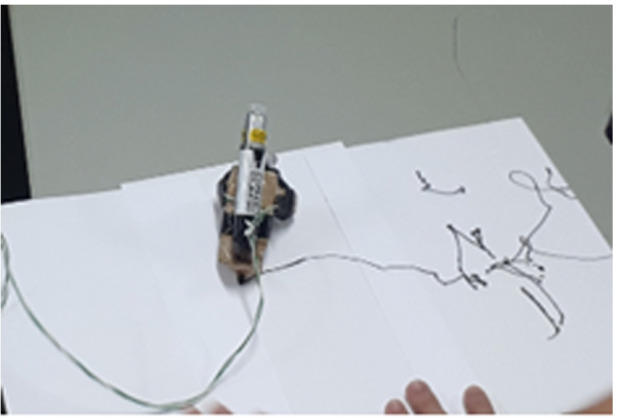
Source; Author’s photo library. T3-EP2 developed this robot to work with graphic art
In the T3 class, there were 38 students, 19 of whom identified themselves with robotics and participated as monitors in helping to design and program the tool. In the dynamic, 30 students proposed that the robot help them in graphic arts, and the others accepted the suggestion. They all participated in using the tool, generating 38 different and authorial drawings.
In T4, with 36 students and 10 with IT identification, the proposal of the robotic resource was also art-oriented. This robot responds to musical notes and stimuli, like the T2-EP1 class experiment.
However, it was built to react autonomously to these stimuli by programming the KY-038 sensor so that when it “heard” the music, it would automatically dance to the beat. For this class, with this proposal, the music rhythm chosen to stimulate the robot was funk, a rhythm known in the community in which most students live. The robot and the programming can be seen in Fig. 5.
Fig. 5.

According to sound perception, a dancing robot developed by T3-EP2 students (a) and code to make the robot dance (b). Source: Author’s photo library
In T5-EP2, the project was to develop an IoT device to identify the characteristics of food by capturing signals from a color sensor. The food is inserted into a box, which contains an Arduino-based IoT device with a TCS3200 color sensor and, through an application developed in AppInventor, via Bluetooth, the device informs what type of food was inserted (such as banana, potato, strawberry, and apple), within a base fed by the users.
The purpose is to use the device and the application to describe the nutritional characteristics of food used in the school canteen. Figure 6 shows the device built according to T5-EP2 orientation and the app logic, which informs the attributes of the food inserted in the IoT compartment.
Fig. 6.

Device to food identify, with TCS3200 color sensor (a) and mobile screen example with Food App (b). Source: Author’s photo library
Another class that applied this approach in 2019 was T6-ER1 (private school), with 9th-grade students aged between 13 and 15. ER1 had more resources and had access to Lego Mindstorm robotics kits (AlQarzaie & AlEnezi, 2022). In the case of T6-ER1, the students chose to develop devices linked to sports, so the robots they produced had to do with sumo wrestling.
Relying on the discoveries obtained in the development of sumo robots, they sought more involvement in the activities and knowledge of sports and physical education, researching and discovering the rules of the various sports. They participate more in physical classes and get new ideas associated with their chosen theme.
In this case, the robots were programmed to act autonomously via the Lego tool. As shown in Fig. 7, two robots were designed. All 25 students in this class participated in developing and defining the chosen robotic resource. It was their idea to choose the sports theme for the robots.
Fig. 7.
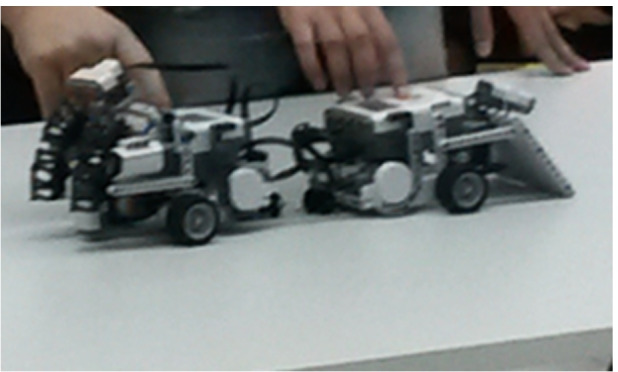
Sumo robots, developed with Lego Mindstorm EV3 by students from a private school. Source: author’s photo library
Results and discussion
Qualitative results
The applications built using the Gestalt approach did not use measurements from hits or errors to verify the use of the created resources or the students’ learning. The first insight into the result involved verifying what each class built from their worldviews and how the generated robotic aid was applied in their intra-school world.
Tables 1 and 2 show a summary containing the results developed per class, which area it was explored, the time each class took to create it, the year it was designed, and how much time it was used in that school year.
Table 1.
Resource developed by class, and area of use
| Class | Resource | Applied area |
|---|---|---|
| T1-EP1 | Bluetooth app-controlled mobile robot | Native Language and Math issues |
| T2-EP1 | Bluetooth app-controlled mobile robot | Musical Arts |
| T3-EP2 | Bluetooth app-controlled mobile robot | Graphic Arts |
| T4-EP2 | Mobile robot operating via onboard programming | Musical Arts |
| T5-EP2 | An IoT device, working with an app via Bluetooth | Earth Sciences (biology and nutrition) |
| T6-ER1 | Mobile robots working through onboard programming | Physical education and sports |
Table 2.
Time of development and service in the school
| Class | Develop. | Year of | Time of use in the |
|---|---|---|---|
| time | develop | school year | |
| T1-EP1 | 2 weeks | 2018 | 25% of school time |
| T2-EP1 | 1.5 weeks | 2019 | 8% of school time |
| T3-EP2 | 2.5 weeks | 2018 | 8% of school time |
| T4-EP2 | 3 weeks | 2019 | 8% of school time |
| T5-EP2 | 4 weeks | 2021 | 30% of school time |
| T6-ER1 | 2.5 weeks | 2019 | 8% of school time |
The number of hours dedicated to teaching is six hours/day, 200 days/year
(but trending toward 50% use at school)
The time of use in each school considered which classes they were used during the year. The percentage of school time used refers to the school time dedicated to the propaedeutic area. More time is taken for mathematics and native language because of the greater emphasis on these subjects (they take up as much as 45% of the total time). The device of the T1-EP1 class was used immediately after its final preparation and before the application of the Knowledge test applied by the Brazilian Ministry of Education, called INDEB, for the year 2018.
In the pre-INDEB period, T1-EP1 was used more frequently so that students could train for the exam, but with a focus on fun, involving playfulness with learning. Art classes take up 10 to 15% of the teaching time in public schools in Brazil. The resource developed by T2-EP1, T3-EP2, and T4-EP2 was used because the teachers, who also participated in the meetings to build the resource as observers, took advantage of the students’ interest in art theme proposed by them to apply in the art class sessions.
That also happened with class T6-ER1, which also took advantage of the Physical Education subject time to use the resource for competitions, aiming e-games and robotics competitions. The robots of T2-EP1 and T4-EP2 were also used outside regular class time because as they were more playful devices (in this case, music), they were also used during free class time.
The T4-EP2 device was used by other EP2 classes (such as 6th, 7th, and 8th grades), who asked the T4-EP2 developers for changes in programming so that different rhythms could be applied. Regarding the robot, from T3-EP2, as stated, it produced 38 additional authored drawings. Figure 8 shows two examples of these. One is based on the free picture, and the other is on the technical image.
Fig. 8.

Drawings made with the T3-EP2 robot, one free art (a), and a robot board with Arduino (b)
The T5-EP2 class developed a resource under more difficult conditions than the others since, in 2021, courses at EP2 were remote until October. Thus, most student meetings took place in a virtual environment, often outside school hours. The focus on testing food and biology came from the students’ perceptions, who became interested in the topic after watching a virtual lecture about food waste.
As the support was all in virtual mode, no students monitored others, as everyone was involved and shared questions. The device presented in Fig. 6(a) was built by one of the researchers following the students’ orientations (because of the virtual orientation mode).
The robotics and gestalt approach in class T5-EP2 produces an effect outside the school environment, representing a fundamental difference from the sum of its parts. It can be applied in other institutions. It was a relevant result, and there is a proposal to continue this work, developing more sensitive devices that can be distributed in school canteens and collaborating against food waste. This result confirms that Gestalt approach developments can go beyond the school walls and be explored in other institutions. The test of the T5-EP2 device has an 88% accuracy margin.
Considering that the sensor is of medium accuracy, this result is a very accurate identification rate (Du et al., 2021). The robot developed by T6-ER1, used in physical education classes, focused on e-sports, caused a relevant secondary result. Before the development, there was little demand in the library for books about e-sports in general or specific; only 13% of the queries in the school library was about sports. When this approach was applied in 2019, the consultation of sportsbooks increased by 45% compared to the previous situation. One of the justifications reported by the students was that they wanted, in the coming years, to continue the development of the robot, focusing on other types of sports.
The resources remained in the school’s possession, but the 2020 pandemic in Brazil and worldwide prevented them from being used this year. Still, by 2022, the expectation is that 100% of the public and private schools in Rio de Janeiro will typically be operating. The devices can continue to be used and improved by other classes in EP1 and EP2 ER1.
As indicated, robotics and programming were not introduced as subjects but as connecting a part of the student’s worldview and the awakening to produce their educational resources. Despite this emphasis on not considering these areas as subjects, the students of EP1, EP2, and ER1 assimilated this learning. They even got enthusiastic about these areas.
When continuing in high school, some of them chose to enter technical schools with these areas as part of the course to continue the development of new educational resources based on robots and IoT. Table 3 presents a summary of what was assimilated by the students associated with robotics and programming.
Table 3.
Robotics and programming content assimilated by students from EP1, EP2, and ER1 during this study’s approach
| Class | Project | Robotics Perceptions (RP) |
|---|---|---|
| Programming Perceptions (PP) | ||
| T1-EP1 | Mobile robot to test knowledge | RP: Mobile robot controlled by a visual application |
| PP: Visual application programming, using conditionals | ||
| T2-EP1 | Mobile robot to answer application signals | RP: Application-controlled mobile robot |
| PP: Visual programming, for response to stimuli | ||
| T3-EP2 | Application-response mobile robot | RP: Application-controlled mobile robotics |
| PP: Visual programming, stimulus-response | ||
| T4-EP2 | Mobile robot responding to audible signals | RP: Autonomous mobile robotics, controlled by onboard programming |
| PP: Onboard programming, and introduction to an object-oriented language | ||
| T5-EP2 | IoT hardware device for object identification | RP: IoT devices and the use of color sensor |
| PP: Visual programming for response to stimuli. IoT device programming with fuzzy logic | ||
| T6-ER1 | Mobile robots to act in sports | RP: Onboard programming |
| PP: Introduction to an object-oriented language |
It is important to note that the use of this approach reduced reactivity impacts concerning learning in general. The project implementation allowed other fields of knowledge, other than robotics, to be explored by students based on the experiences obtained during the performance of the Gestalt approach throughout the year.
Quantitative results
It is important to have a quantitative analysis to corroborate the adherence of the Gestalt Approach to the classes and schools in which it was applied. Thus, a standard questionnaire was prepared and answered by those involved in the projects per class. The questionnaire had seven questions, described as follows:
Did you know anything about robotics or computers? (Yes, No)
Was the experiment with robotics satisfactory? (Yes, No)
Learning about robotics encouraged you to learn other subjects, like Math and Portuguese? (Yes, No)
Rate what was seen in the sessions regarding (0: Low, 10: High)
New knowledge acquired
Fun in learning
Practical use of acquired knowledge
Indication of the approach to other colleagues
The results of questions Q1 to Q3, per class, can be seen in Table 4.
Table 4.
Responses for Q1 to Q3
| Class | Q1 | Q2 | Q3 | |||
|---|---|---|---|---|---|---|
| No | Yes | No | Yes | No | Yes | |
| T1-EP1 | 25 | 17 | 8 | 34 | 12 | 30 |
| T2-EP1 | 20 | 16 | 0 | 36 | 0 | 36 |
| T3-EP2 | 28 | 10 | 0 | 38 | 0 | 38 |
| T4-EP2 | 20 | 16 | 0 | 36 | 0 | 36 |
| T5-EP2 | 18 | 18 | 6 | 30 | 7 | 29 |
| T6-ER1 | 15 | 10 | 0 | 25 | 0 | 25 |
The results of Q4a to Q4d, per class, can be seen in Table 5 organized according to first, second (median), and third quartiles (, , ).
Table 5.
Responses for Q1 to Q3
| Class | Q4a | Q4b | Q4c | Q4d | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| T1-EP1 | 8 | 9 | 10 | 8 | 9 | 10 | 7 | 8 | 9 | 8 | 9 | 10 |
| T2-EP1 | 9 | 9 | 10 | 9 | 9 | 10 | 9 | 9 | 10 | 9 | 9 | 10 |
| T3-EP2 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 |
| T4-EP2 | 9 | 9 | 10 | 10 | 10 | 10 | 9 | 9 | 10 | 10 | 10 | 10 |
| T5-EP2 | 9 | 10 | 9 | 8 | 9 | 10 | 8 | 9 | 10 | 8 | 9 | 10 |
| T6-ER1 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 |
T1-EP1 showed small adherence to the method and knowledge acquired. This discrepancy is attributed to the fact that it was the first class. Students were free to choose any theme. Since it was too loose, from the researchers’ point of view, such liberty caused students difficulty observing acquired knowledge and its practical use.
Conversely, in T2-EP1, the evaluation was much more positive than in T1-EP1. The researchers noted that the choice of a playful theme involving music and dance was stimulating. It was positive and caused greater adherence.
In T3-EP2, students were driven to create their drawings. It made everyone participate effectively. It was even more positive and adherence than other previous classes. It helped in the decision-making of the next classes in which the Gestalt Approach was applied.
T4-EP2 presented a greater adherence than in other classes of public schools due to the presence of music and movement activities. Using a rhythm known and chosen by the students contributed to the perceived robotics and computing as useful knowledge.
T5-EP2 was impaired by the pandemic and the short time of classroom sessions concerning the other classes. However, the adherence to the methodology was better than in the first class. The theme involved their daily life activities was seen as positive in applying the Gestalt approach.
T6-ER1 also had a 100% positive evaluation, partly because the robotics environment was improved using Lego Mindstorms. In addition, the group was encouraged to use robotics in a competition. It caused the effect of knowing that robotics could be embedded in sports.
The participants’ responses enabled us to confirm the efficacy of the didactic model presented. The Gestalt Approach encourages imagination and creativity. It allows participants to “shape” resources and provide adherence to the idea of robotics and computing as something not only useful but close to their everyday life. It made room for them to test new experiences outside the classroom.
In a way, although the Gestalt Approach is not easy to be measured quantitatively, the questionnaires and interviews provide clues that the methodology is applicable. It enables creativity and freedom. It also stimulates the adherence to new knowledge linked to participants’ worldviews.
Limitations and perspectives
It is important to highlight that there were limitations in this continued work. First, the research is conducted by a reduced team, making it difficult to assess multiple schools simultaneously. Another limitation concerns the legal aspects of the research country. Long-term bureaucratic actions are needed to access schools and ask permission to work with them.
It is also noteworthy that the focus was to use this approach in schools in less favored areas, regardless of whether they are public or private institutions. Access to these areas also does not require transport, which is difficult with the small staff.
Despite the difficulties, we reached four schools and six different classes throughout these four years. We effectively influenced the academic life of more than 200 students of the last elementary school level. The research team considered a positive point in relative terms.
The more the project can meet academic needs, the more people join the team, which favors simultaneously increasing the range of schools affected. In 2022, acting in two new classes in two different schools was already possible. The future perspective of the project is to extend the work to work with four courses per year.
Conclusions
Using a Gestalt approach with robotics to learn IT resources was efficient in the six classes. It stimulated students’ creativity, imagination, and ability to shape the solution to problems established by them. The objective was to make these resources emerge from a process inside the classroom. It enabled the active participation of students. They created not only a personal tool but also inclusive resources. It allowed the fruit of collective creation and focused on discovering new knowledge.
The experience in the three schools showed little or no reactivity. It stimulated students to discover the IT world. It awakened the importance of experimenting with new knowledge with these resources. Teachers, students, and IT resources were seamlessly connected. It removed the stativity of the educational process and promoted dynamism in constructing knowledge.
The experience with this didactic was used to make students feel capable of producing their IT resources to aid in learning instead of having them invade their already reactive classroom space. A secondary outcome was that the approach brings education, humanities, and technology together in a personal, collective, replicable, and easily accessible configuration. Thus, the indivisible teaching process, discovering new knowledge, and adapting becomes a consolidated reality. With the release of face-to-face access, the institutions have already committed to continuing this didactic approach in other classes and levels, focusing on high school classes.
Acknowledgements
The authors thank CNPq, CAPES (finance code 001), and FAPERJ for partially sponsoring this research.
Data availability
The datasets analyzed during the current study are available at https://eic.cefet-rj.br/~dal/gestalt-approach/.
Declarations
Conflicts of interest
None.
Footnotes
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Contributor Information
Eduardo Ogasawara, Email: eogasawara@ieee.org.
João Quadros, Email: joao.quadros@cefet-rj.br.
References
- AlQarzaie K, AlEnezi S. Using LEGO MINDSTORMS in primary schools: Perspective of educational sector. International Journal of Online and Biomedical Engineering. 2022;18(1):139–147. [Google Scholar]
- Al-Shanoon, A., & Lang, H. (2022). Robotic manipulation based on 3-D visual servoing and deep neural networks. Robotics and Autonomous Systems, 152.
- Ariza J, Baez H. Understanding the role of single-board computers in engineering and computer science education: A systematic literature review. Computer Applications in Engineering Education. 2022;30(1):304–329. [Google Scholar]
- Asoodar M, Atai M, Vaezi S, Marandi S. Examining effectiveness of communities of practice in online English for academic purposes (EAP) assessment in virtual classes. Computers and Education. 2014;70:291–300. doi: 10.1016/j.compedu.2013.08.016. [DOI] [Google Scholar]
- Badeleh A. The effects of robotics training on students’ creativity and learning in physics. Education and Information Technologies. 2021;26(2):1353–1365. doi: 10.1007/s10639-019-09972-6. [DOI] [Google Scholar]
- Beisser A. The paradoxical theory of change. Gestalt Therapy Now. 1970;1(1):77–80. [Google Scholar]
- Bernacki, M., Greene, J., & Crompton, H. (2020). Mobile technology, learning, and achievement: Advances in understanding and measuring the role of mobile technology in education. Contemporary Educational Psychology, 60.
- Capek, K. (1990). Toward the radical center: A karel capek reader. Catbird Press.
- Chang, C.-C., & Chen, Y. (2020). Using mastery learning theory to develop task-centered hands-on STEM learning of Arduino-based educational robotics: Psychomotor performance and perception by a convergent parallel mixed method. Interactive Learning Environments.
- de Praga Baião C, Batista G. Script for analysis of water quality of a watershed for use by elementary school students. Revista Ambiente e Agua. 2016;11(5):1030–1041. [Google Scholar]
- Du Y, Zhang G, Zhang Y, Wang M. High-resolution 3-dimensional contact deformation tracking for fingervision sensor with dense random color pattern. IEEE Robotics and Automation Letters. 2021;6(2):2147–2154. doi: 10.1109/LRA.2021.3061306. [DOI] [Google Scholar]
- Erdem R. Students with special educational needs and assistive technologies: A literature review. Turkish Online Journal of Educational Technology. 2017;16(1):128–146. [Google Scholar]
- Ferreira M. Intelligent classrooms and smart software: Teaching and learning in today’s university. Education and Information Technologies. 2012;17(1):3–25. doi: 10.1007/s10639-010-9134-8. [DOI] [Google Scholar]
- Giroux H. Rethinking education as the practice of freedom: Paulo Freire and the promise of critical pedagogy. Policy Futures in Education. 2010;8(6):715–721. doi: 10.2304/pfie.2010.8.6.715. [DOI] [Google Scholar]
- Greenwood J. On two foundational principles of the Berlin school of Gestalt psychology. Review of General Psychology. 2020;24(3):284–294. doi: 10.1177/1089268019893972. [DOI] [Google Scholar]
- Grenčíková A, Kordoš M, Navickas V. The impact of industry 4.0 on education contents. Business: Theory and Practice. 2021;22(1):29–38. [Google Scholar]
- Grossi C. Musical education in Brazil–teacher training and the world of work. Music Education Research. 2006;8(1):33–45. doi: 10.1080/14613800600570710. [DOI] [Google Scholar]
- Hanisch, A., Negrelle, R., Bonatto, R., Nimmo, E., & Lacerda, A. (2019). Evaluating sustainability in traditional silvopastoral systems (caívas): Looking beyond the impact of animals on biodiversity. Sustainability (Switzerland), 11(11).
- Helsa, Y.Y., Helsa, Y., Ariani, Y., & Kenedi, A.K. (2019). Digital class model in mathematics learning in elementary school using social learning network schoology. pp 739–742. Atlantis Press.
- Huang Y-C, Backman S, Backman K, McGuire F, Moore D. An investigation of motivation and experience in virtual learning environments: A self-determination theory. Education and Information Technologies. 2019;24(1):591–611. doi: 10.1007/s10639-018-9784-5. [DOI] [Google Scholar]
- Jati, H., Nurkhamid, & Wardani, R. (2021). Visibility ranking of university E-learning websites-CRITIC method approach. In Journal of Physics: Conference Series (vol. 1737).
- Joshi A, Pan A, Murakami M, Narayanan S. Role of computers in educating young children: U.S. and Japanese teachers’ perspectives. Computers in the Schools. 2010;27(1):5–19. doi: 10.1080/07380560903536249. [DOI] [Google Scholar]
- Kim, M., Kim, J., Jung, M., & Oh, H. (2022). Towards monocular vision-based autonomous flight through deep reinforcement learning. Expert Systems with Applications, 198.
- Kingstan, Suchithra D. Implementation of DC motor control for a robotic monitoring system using raspberry PI. International Journal of Applied Engineering Research. 2015;10(5):4469–4472. [Google Scholar]
- Mahdi WS, Salih IH, Hashim G, Loganathan GB. Evaluation of robot professor technology in teaching and business. Journal of Information Technology in Industry. 2021;9(1):1182–1194. doi: 10.17762/itii.v9i1.255. [DOI] [Google Scholar]
- Melo, M.d.C.B.d., Tupinambás, U., Ferri, P.M., Godoy, S.C.B., Torres, R.M., Palmeira, V.A., Rocha, G., & Reis, Z.S.N. (2021). Covid-19: E-learning as a tool for improving the knowledge. Revista Brasileira de Educação Médica, 45.
- Monsores J, Almeida T, Toledo Quadros L, Toledo Quadros J. Technology and Gestaltism: A robotic-based learning aid tool. IEEE Latin America Transactions. 2020;18(8):1441–1447. doi: 10.1109/TLA.2020.9111680. [DOI] [Google Scholar]
- Mukh Y. Educational robotics as an effective use of technology to enhance learning. International Journal of Online and Biomedical Engineering. 2021;17(6):122–127. [Google Scholar]
- Niku SB. Introduction to robotics: Analysis, control, applications. New York: John Wiley & Sons; 2020. [Google Scholar]
- Olakanmi O, Akcayir G, Ishola O, Demmans Epp C. Using technology in special education: Current practices and trends. Educational Technology Research and Development. 2020;68(4):1711–1738. doi: 10.1007/s11423-020-09795-0. [DOI] [Google Scholar]
- Panskyi T, Rowińska Z. A holistic digital game-based learning approach to out-of-school primary programming education. Informatics in Education. 2021;20(2):1–22. [Google Scholar]
- Parsons A, Omylinska-Thurston J, Karkou V, Harlow J, Haslam S, Hobson J, Nair K, Dubrow-Marshall L, Thurston S, Griffin J. Arts for the blues–a new creative psychological therapy for depression. British Journal of Guidance and Counselling. 2020;48(1):5–20. doi: 10.1080/03069885.2019.1633459. [DOI] [Google Scholar]
- Pill S, Hyndman B. Gestalt psychological principles in developing meaningful understanding of games and sport in physical education. Journal of Teaching in Physical Education. 2018;37(4):322–329. doi: 10.1123/jtpe.2018-0033. [DOI] [Google Scholar]
- Sarı, U., Pektaş, H., Şen, O., & Çelik, H. (2022). Algorithmic thinking development through physical computing activities with Arduino in STEM education. Education and Information Technologies.
- Silva, E.F., Dembogurski, B.J., & Semaan, G.S. (2021). A systematic review of computational thinking in early ages. arXiv:2106.10275 [cs].
- Sisman B, Kucuk S, Yaman Y. The effects of robotics training on children’s spatial ability and attitude toward STEM. International Journal of Social Robotics. 2021;13(2):379–389. doi: 10.1007/s12369-020-00646-9. [DOI] [Google Scholar]
- Skottun, G., & Krüger, A. (2021). Gestalt therapy practice: Theory and experiential learning. Routledge. Google-Books-ID: LZQ2EAAAQBAJ.
- Songkram, N., & Chootongchai, S. (2020). Effects of pedagogy and information technology utilization on innovation creation by SECI model. Education and Information Technologies.
- Thomas, M., Crabtree, M., Janvier, D., Craner, W., Zechner, M., & Bussian, L. (2022). Bridging religion and spirituality with Gestalt psychotherapy to improve clinical symptoms: Preliminary findings using Gestalt pastoral care. Psychotherapy. [DOI] [PubMed]
- Watters A. Teaching machines: The history of personalized learning. Cambridge: MIT Press; 2021. [Google Scholar]
- Yepes I, Barone DAC, Porciuncula CMD. Use of drones as pedagogical technology in STEM disciplines. Informatics in Education. 2022;21(1):201–233. [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.
Data Availability Statement
The datasets analyzed during the current study are available at https://eic.cefet-rj.br/~dal/gestalt-approach/.