

Abstract
Insufficient physical activity (PA) is commonplace in society, in spite of its significant impact on personal health and well-being. Improved interventions are clearly needed. One of the challenges faced in behavioral interventions is a lack of understanding of multi-timescale dynamics. In this paper we rely on a dynamical model of Social Cognitive Theory (SCT) to gain insights regarding a control-oriented experimental design for a behavioral intervention to improve PA. The intervention (Just Walk JITAI) is designed with the aim to better understand and estimate ideal times for intervention and support based on the concept of “just-in-time” states. An innovative input signal design strategy is used to study the just-in-time state dynamics through the use of decision rules based on conditions of need, opportunity and receptivity. Model simulations featuring within-day effects are used to assess input signal effectiveness. Scenarios for adherent and non-adherent participants are presented, with the proposed experimental design showing significant potential for reducing notification burden while providing informative data to support future system identification and control design efforts.
I. Introduction
Inactivity has led to an increase in chronic diseases within populations [1]. Physical inactivity causes an increased deterioration of body functions resulting in illnesses like obesity, diabetes, heart diseases, cancer, rheumatoid arthritis and more. On the other hand, maintaining healthy levels of PA can work as a preventive measure against all of these illnesses, or at least delay their onset [1], [2]; an increase from 4,000 to 8,000 steps/day reduces the risk for all-cause mortality by 51% for adults. Despite the various public physical activity awareness campaigns over the years, there is a low prevalence of healthy PA levels in the general population; about 80% of adults in the US do not meet the recommended CDC guidelines of 150 minutes of moderate to vigorous physical activity exercise [3]. Thus, the question is not if PA is beneficial for health, rather how to support people to engage and sustain healthy PA levels. Control systems engineering has proven to be very beneficial in many fields, and the adoption of system identification and dynamic control strategies in the behavioral medicine field is an area of significant promise in research [4], [5]. Prospects include dissemination of interventions that can help fight addiction, and adopt healthy behavior to the general population.
With increased availability of temporally dense data afforded by digital technologies, there has been a re-emergence in the use of idiographic methods, that is, data analysis explicitly designed to study predictions and patterns within time series data corresponding to a single individual. These temporally dense time series data have also enabled the use of control systems methods, such as dynamical systems modeling, system identification, and control systems design to guide dynamic decision-making. In particular, prior work has illustrated the value of dynamical systems modeling for specifying dynamic predictions relevant to behavior change in context [6], the value of system identification for producing informative data about dynamic processes related to behavior change [5], and the possibility of creating controllers to drive digital health interventions [7].
Building on this prior work, a key gap in the field’s understanding of dynamical processes of behavior exists with regard to multi-timescale prediction and, by extension, decision-making. In particular, the field has advanced the concept of a just-in-time adaptive intervention [8], which involves both provision of support when a person has the need for a specific type of support, opportunity to respond favorably to the support, and receptivity to receiving the support, which can then contribute to adaptations over time that result in meaningful behavior change (e.g., meeting and sustaining behavioral targets). Thus, it is not only important to provide good “just-in-time” support, but to also make sure said support is contributing towards meaningful behavior change over time. This issue could be conceptualized as a multi-timescale problem in that robust prediction and decision-making is needed both in shorter timescale (e.g., deciding whether to send a notification to invite a person to plan a bout of walking in the next 3 hours) and longer timescales (e.g., establishing “ambitious but doable” step goals in a given day that can facilitate gradual increases towards clinically meaningful targets).
The purpose of this paper is to describe an innovate input signal design to study multi-timescale dynamics that are part of a digital health intervention Just Walk JITAI (JITAI stands for Just-in-Time Adaptive Intervention). This work leverages prior work, particularly a dynamical model of Social Cognitive Theory (SCT) that encapsulates prior domain knowledge about behavioral processes that influence physical activity. Specifically, we use SCT to simulate plausible responses of participants to different signal design strategies, and use these responses to assess the quality of the input signal designs.
The paper is organized as follows: Section II gives a brief description of SCT. Section III presents components and the thought process for the behavioral change experiment. Section IV details the input signal design, while in Section V simulation results of the examined case studies are presented and discussed. Section VI provides conclusions along with implications on future work.
II. Social Cognitive Theory (SCT)
Theories of behavior change like SCT utilize psychological constructs to hypothesize how different factors may impact behavior. SCT allows for the prediction of the ability of an individual to engage in determined behavior, by explaining the interconnections between various factors influencing behavior, including prior experience [9]. The constructs in the SCT can be measured using sensors or other approaches of inference from sampled signals. Fluid analogies utilize engineering principles, such as the conservation of mass, to represent theories of behavioral change like SCT as dynamic mathematical models. The work done in [6] describes a dynamical model for the SCT which can be seen in Fig. 1 in a fluid analogy representation.
Fig. 1:
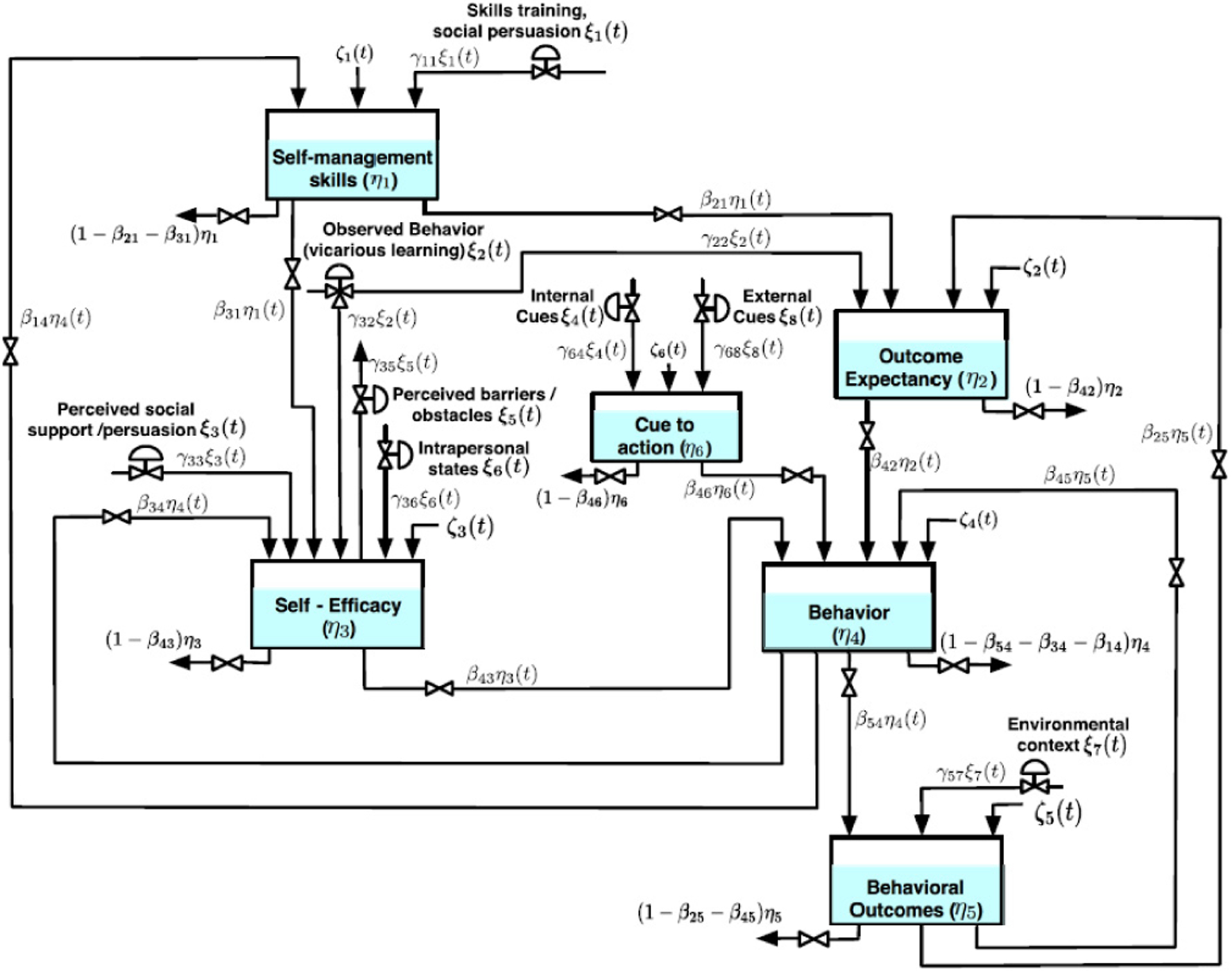
Schematic illustrating the fluid analogy of the Social Cognitive Theory model [4], [6].
In the fluid analogy the main SCT behavioral constructs are considered as inventories (tanks) in an inventory system with the level inside each vessel representing system outputs. Brief descriptions of the main system outputs included in this work are as follows:
Outcome expectancies (η2): The perceived chance that engaging in a behavior will lead to certain outcomes.
Self-efficacy (η3): The perceived capability and desire to engage in a targeted behavior, given constraints, obstacles and demands.
Behavior (η4): The actual behavior of interest. This can represent different characteristics of behavior (e.g. frequency, intensity, duration). For this study, the behavior of interest is the amount of steps taken per day.
Behavioral outcomes (η5): The outcomes (e.g. fatigue, fitness, etc) resulting from engagement in a behavior.
Cues to action (η6): Represents cues that trigger the urge to engage in behavior throughout the day.
Based on the SCT, behavioral constructs are influenced by exterior stimuli from various factors as well as from interactions between the constructs, which is depicted by how inventory levels change over time based on influences of inflows/outflows into the system (system inputs) and deviations in connected inventories. The inputs considered in this work are summarized below:
External Cues: Represents exogenous stimuli to the system (e.g. assigned goals, a friend’s invite) which triggers behavior or behavior increase.
Perceived barriers and obstacles: Represents external conditions that directly impact self-efficacy (e.g. busyness, seasonal illness).
Environmental context: External and environmental conditions that can have a positive or negative impact on the experience at which behavior occur and the behavioral outcomes as a consequence (e.g. weather, weekday versus weekend).
III. Intervention Design: Just Walk JITAI
The Just Walk JITAI intervention design follows a similar structure to an earlier behavioral intervention (Just Walk) with respect to the goal setting component, where in an open-loop setting participants were given a specific amount of steps to walk each day as the daily goal, provided as cycles of multisine signals [10]. In an extension to what was done in Just Walk, in this intervention the maximum and minimum values of the daily goals in each cycle are adjusted based on the average performance of the previous cycle. This allows for maintaining ambitious yet achievable daily goals personalized for each participant in each cycle. For the initial cycle of the intervention the maximum and minimum values are decided based on the participant’s performance at the baseline period, where participant behavior is measured prior to the start of the intervention.
The second component of Just Walk JITAI is the inspiring bouts, which consists of within-day notifications designed to inspire a person to take a short (e.g. 10 minutes) walk. This intervention component is designed with focus on studying the notion of a just-in-time (JIT) state, which involves the degree to which the notification is well matched to a particular moment. To operationalize this, three conditions about the current moment are taken into account:
Need (N): Whether the participant has not met or progressed enough towards the given daily goal.
Opportunity (O): Whether the participant has a window of opportunity to go on a walk within the upcoming sampling period (based on an availability signal or recognized patterns).
Receptivity (R): If the participant has received less than 3 messages within the day.
Three combinations of the conditions are chosen as the decision rules for the inspiring bouts component: 1) N+O, 2) N+R, 3) N+O+R also known as the JIT decision rule.
The premise of the inspiring bouts component is to examine the dynamic responses to provision of support within moments that are more or less likely to be “just-in-time”; meaning a moment when a person has the need, opportunity and receptivity to a given intervention. By nudging participants to plan for PA when they are in “just-in-time states” the yield of the inspiring bouts should increase, while maintaining minimal burden and notification fatigue.
Participants in the intervention are given a Fitbit Versa 3 device to track their daily step count. Daily goals are delivered through a smartphone application which syncs with the Fitbit device to obtain measurements and store them in a database on a secure server. Measurement of other output psychological constructs like self-efficacy (η3), and behavioral outcomes (η5) are taken through surveys known as ecological momentary assessments (EMAs) provided to participants at different times of the day. Multiple specifically articulated survey questions are designed to assess each construct and the average score is utilized.
In this paper the SCT model is simplified by excluding the self-management skills inventory (η1). Moreover, only perceived barriers/obstacles (ξ5) and environmental context (ξ7) are considered as disturbances out of system’s exogenous inputs. External cues (ξ8) are also considered including both intervention components: goal setting () and inspiring bouts (). This yields the system of ordinary differential equations (ODEs) that can be seen in (1–5) below:
| (1) |
| (2) |
| (3) |
| (4) |
| (5) |
In a departure from previous work, the SCT model in Equations 1 through 5 has been modified to accommodate for within-day effects (like inspiring bouts notifications) on the numerical solution generated during integration. This is essential in the simulations covered in this paper, where the model is used to achieve an informative input signal design for the system of interest. The process of input signal design is iterative by nature, and the developed simulation allows for examining different designs on hypothetical participants to set expectations and validate decisions made in the design. For instance, by simulating extreme scenarios, a rough estimate of the number of notifications being sent to a participant throughout the intervention is obtained. This allows for the assessment of the expected notification burden associated with each decision rule.
IV. Input Signal Design
To elicit dynamics over the timescales of interest, two different input signals are designed for the goal setting and inspiring bouts intervention components, respectively. Both signals follow the guidelines presented in [11], in which equation (6) is applied to define the effective frequency range of the input signal based on a a priori knowledge of the dominant system time constant,
| (6) |
and represent the lower and higher bounds for the estimated dominant time constant of the system. αs and βs dictate the input signal’s content of high and low frequency.
For goal setting a multisine (MS) signal is utilized. The input signal design parameters of , , αs = 2, βs = 2 are chosen based on obtained knowledge from previous work. The design parameters lead to a cycle length of 26 days as seen in Fig. 2. The MS signal determines the daily goals given to participants throughout the 260 days intervention, in 10 cycles. For each cycle the lower bound in goals is determined by the average steps taken per day from the previous cycle with a 2,000 steps/day range. This design is expected to result in an added transient in the output signals, which will have to be taken into account in subsequent dynamical analysis of the experimental data.
Fig. 2:
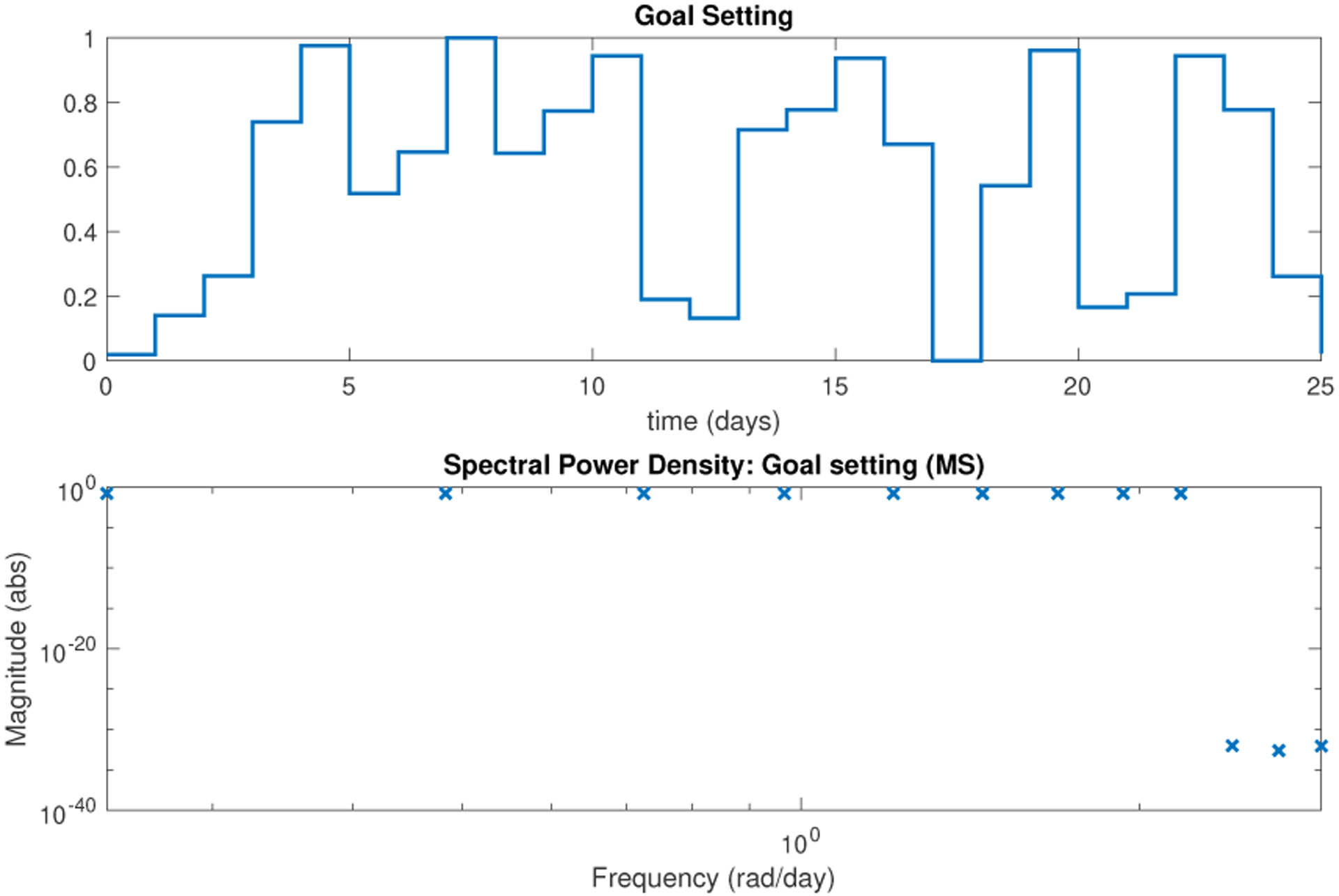
Multisine base cycle for the goal setting input signal along with its spectral power density.
The effective frequency range of the signal is related to the design parameters through (6). As it is highlighted in the power spectrum of the signal seen in Fig. 2; this indicates excitation between ω* ≈ 0.25 rad/day to ω* ≈ 2 rad/day for the designed MS signal.
As per the inspiring bouts component, the three decision rules for sending prompts to participants are tested against fully randomized prompts, to study the effectiveness and dynamics of the decision rules. The purpose of the decision rules is to minimize the burden on participants and notification fatigue by prompting engagement in PA when participants are most likely to respond. To construct this categorical four level input signal, an innovative method is used where a pseudo-random binary sequence (PRBS) is utilized as the base. Then, a random multi-level sequence (RMLS) is superimposed over one of PRBS’s binary levels.
Input signal design parameters for the PRBS are chosen as follows , , αs = 2, βs = 2. This results in a 60 days cycle with nr = 4 shift registers and switching time Tsw = 4 days. The parameters are chosen to cover the most important dynamics of the system by introducing variability in a sufficient frequency without allowing the system to settle. Four cycles of the designed PRBS signal are needed to cover 240 days of the study, then the inspiring bouts element is taken offline for the remainder of the experiment. Fig. 3 provides further assurance regarding the chosen guidelines for the base PRBS input signal, as it can be seen that the spectral power density packs sufficient persistent excitation by the amount of harmonics included in the effective frequency range between ω* 0.14 rad/day to ω* ≈ 0.67 rad/day.
Fig. 3:
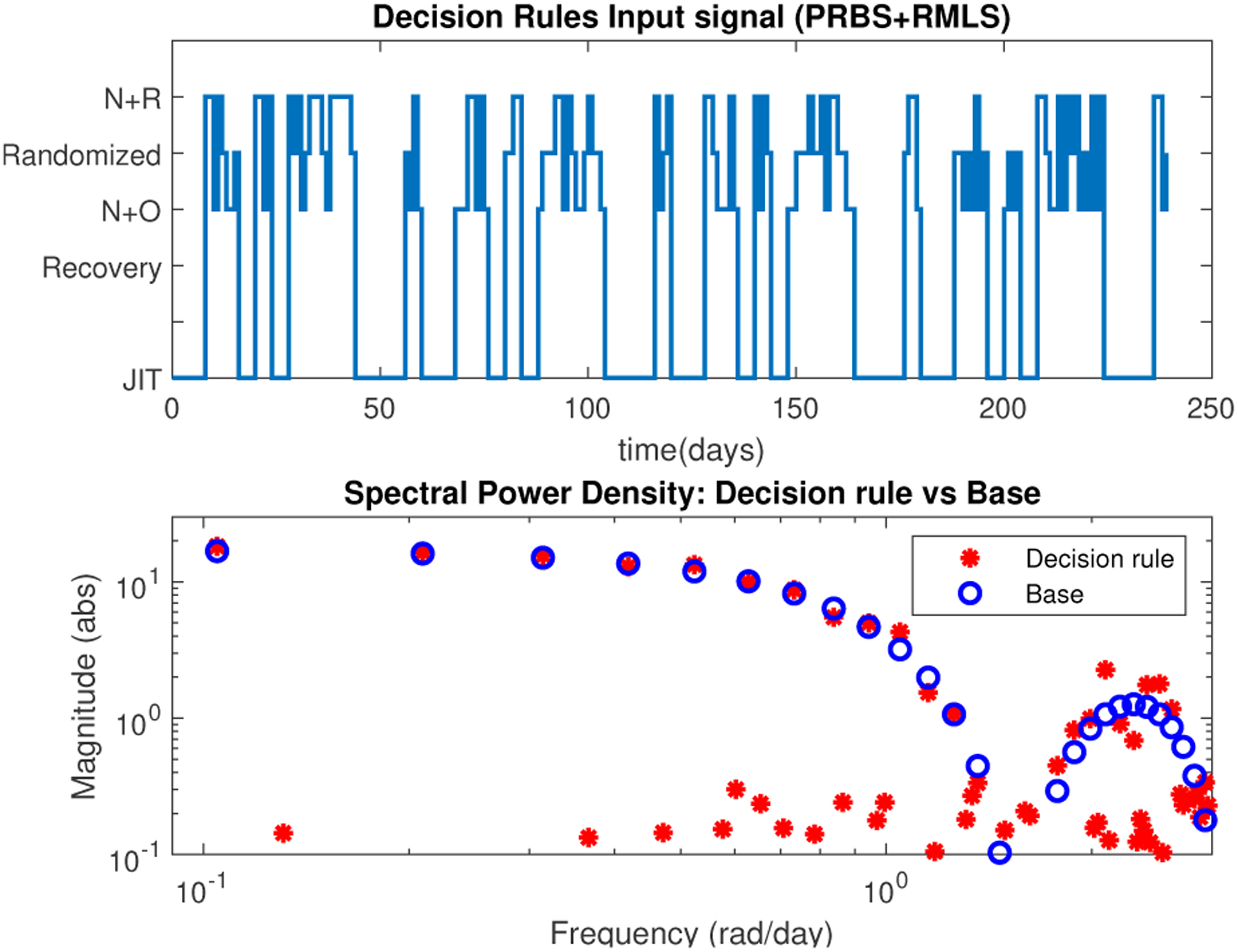
Combined PRBS and RMLS constructing the decision rule signal. Spectral power density of the final decision rules signal in comparison to the PRBS base.
A uniformly distributed RMLS with three levels is superimposed over the base PRBS signal, where the signal equals 1. The three level RMLS is generated with a different realization at each instant that the PRBS signal switches to 1. This allows for superimposing a new random sequence at each instant it is needed, without any repetitions across cycles as can be seen in Fig. 3, which reduces the bias from the possibility of participants recognizing any repetitive patterns.
The switching time for the RMLS signal is one day, allowing to introduce more variability at a higher frequency to the decision rules input signal. This adds excitation to the high frequencies while preserving excitation in the lower frequencies at the effective frequency range, as Fig. 3 illustrates. Moreover, the decision framework of the inspiring bouts component allows for identification of high frequency dynamics through the effect of the notifications sent to participants within-day.
The utilization of the decision rule input signal for the inspiring bouts component, along with the goals signal for the goal setting component assures covering a wide range of system dynamics over the different time scales of interest. Despite the overlap in the effective frequency ranges of the designed input signals, each of them is unique in the component it covers, and the two signals are orthogonal to one another in nature. This can be confirmed by applying cross-correlation analysis on the designed input signals. The input signal design is made with the purpose of providing persistence of excitation across both low and high frequency, and generate dynamically informative experimental data suitable for various modeling approaches.
V. Simulation Results & Discussion
The SCT model described previously is utilized to simulate the designed intervention on two types of hypothetical participants: an adherent (ideal) participant, and (on the contrary) a non-adherent participant. The simulations focus on the scenario where life challenges can affect participant performance. Such challenges are demonstrated by the exogenous disturbances in the form of perceived obstacles & barriers, and environmental context. This is done to mimic real life situations where undesired environmental factors like weather (i.e., rain, heat waves, etc.) might not allow participants to exercise or walk in their normal routine. Another exogenous factor that can impact engagement in PA lies in the daily life obstacles participants perceive and face, like coming down with a seasonal illness or having to accommodate for unforeseen work/school/social life demands. To generate the exogenous disturbances signal a uniformly distributed random number is generated for each day of the simulation, if the number exceeds a probability threshold, the exogenous signal is set to the amplitude of 5 units. Different thresholds are utilized for the two different exogenous disturbances of interest utilized in both scenario.
The goal of the intervention is to increase the amount of steps participants take per day, and ideally reach 10,000 steps/day. All simulations assume inactive participants with 2,000 steps/day as the baseline and the intervention starting at day zero. Additive high frequency noise is introduced to the behavior as part of the system, to mimic the variability in the amount of steps taken per day, as observed in previous work. Other stochastic conditions are incorporated in the simulation as white noise through unmeasured disturbances ζi(t) at each inventory i. In this section the results obtained for each participant are presented and the insight these provide into the intervention and input signal design is discussed.
To account for the opportunity condition in simulations, an availability signal is developed with a hypothetical schedule for the participants. Time within-day is divided to eight periods of three hours, where the first two periods and the last period are excluded to avoid sending prompts while participants are asleep. Participant availability in the remaining five periods within the day is randomly generated. This signal is utilized in all simulations for the opportunity condition in the decision rules.
A. Adherent Participant: With Disturbances
In this scenario the participant is very adherent with the given goals, as the cues to actions level sharply increases with the increase in the daily goals. Despite the negative impact of the considered exogenous disturbances (which can be seen in the self-efficacy and behavioral outcome responses), this participant manages to adapt to higher goals quite effectively. The participant overachieves the daily goals by decent margins (up to 4,000 steps/day) as illustrated in Fig. 4 by the goal attainment signal; this participant meets or exceeds the daily goals for 63.5% of the intervention. Based on this described nature of the behavior, this participant can be classified as a goal-oriented, determined person who is not easily deterred by any obstacles or inconveniences. Self-efficacy and behavioral outcomes increase as the benefits of the increased behavior levels are observed by the participant, and higher outcome expectancies follow. This contributes to behavior itself as part of the self-efficacy (SE) operant-learning (OL) loops.
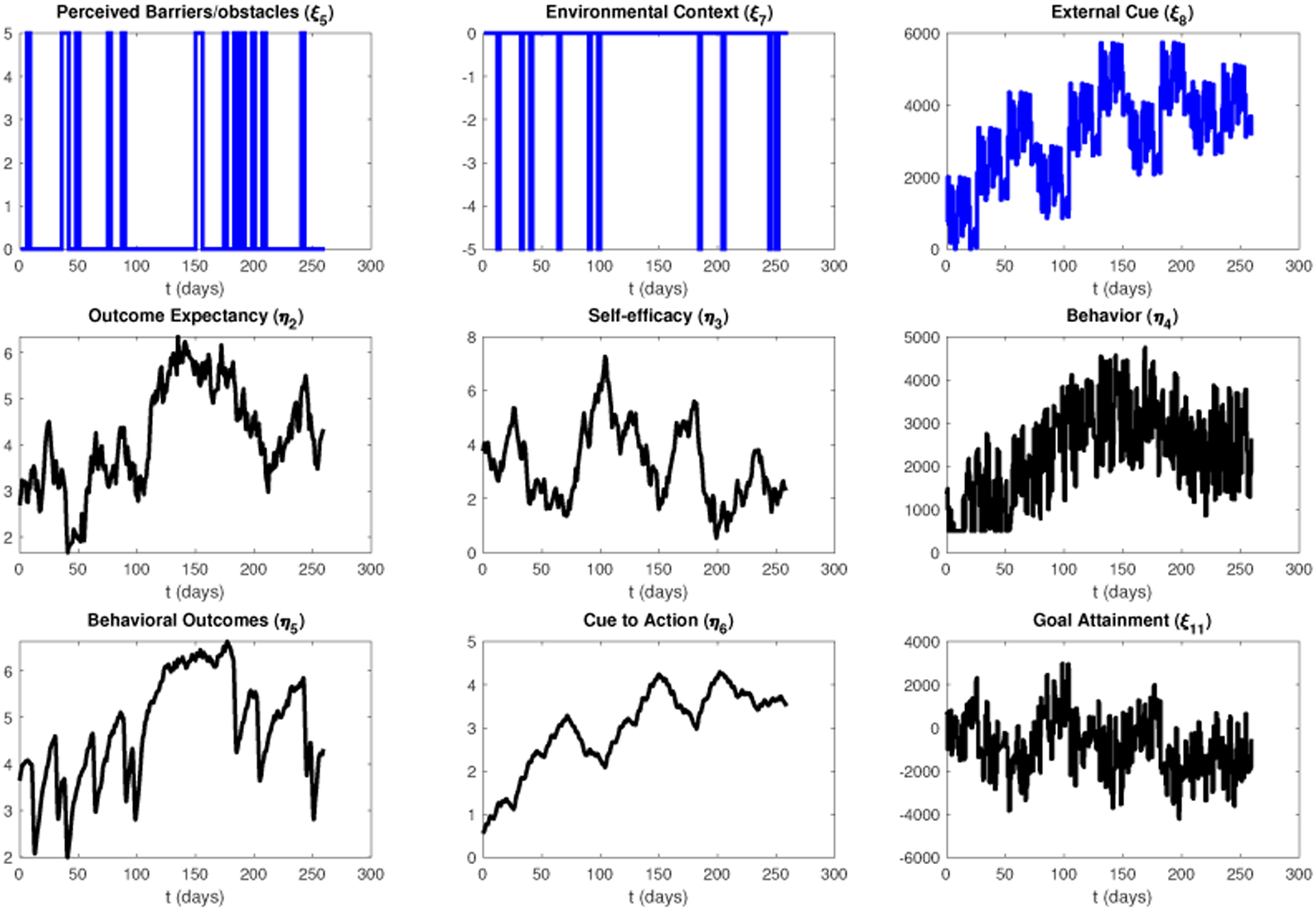
Fig. 4:
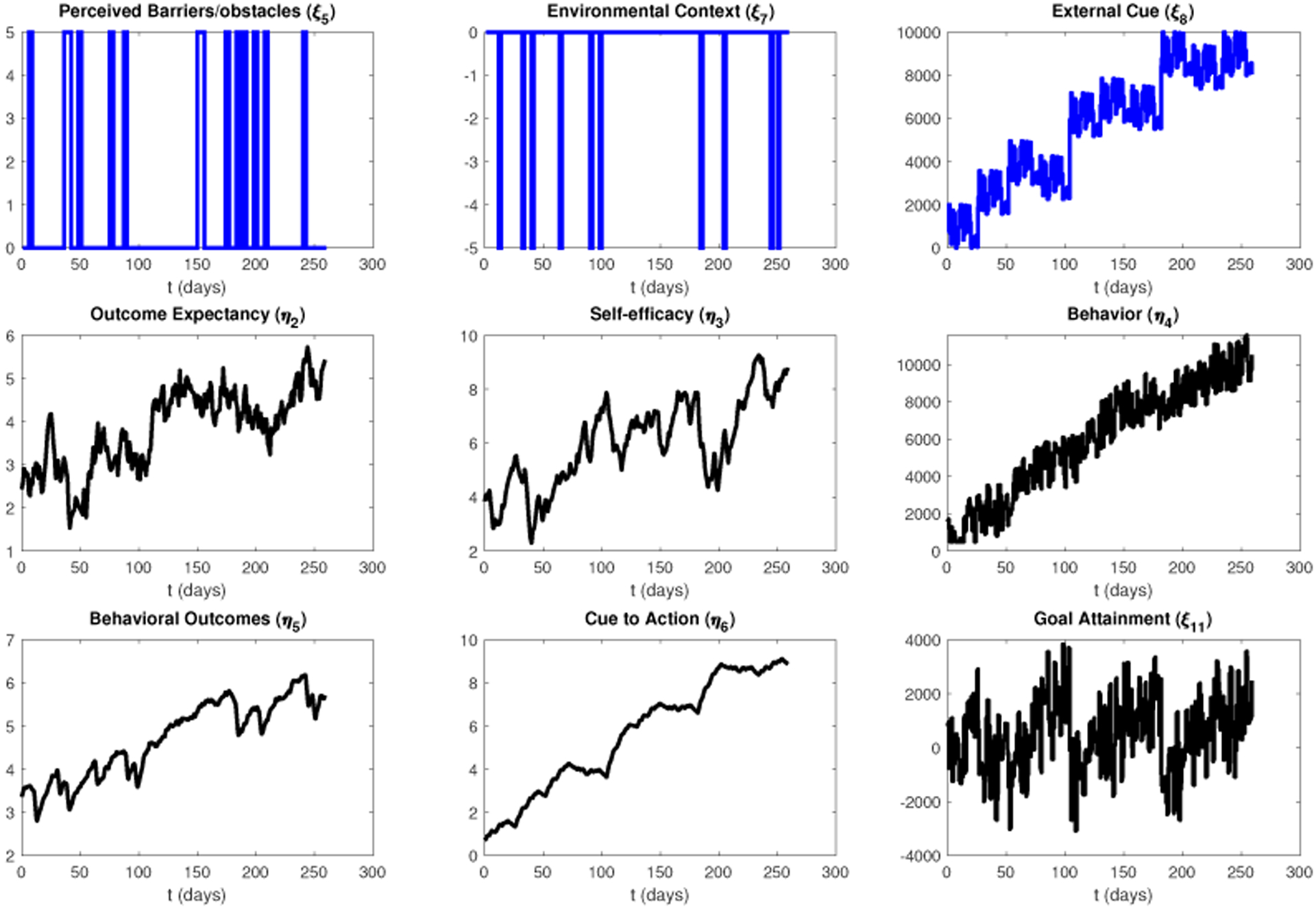
Simulation that illustrates the response of an adherent participant to the designed input signals, in the presence of disturbances in the form of perceived barriers/obstacles and bad environmental context
Overachieving the assigned goals in each MS cycle by this participant leads to the progression in the daily goals towards the target of 10,000 steps/day. The majority of the significantly negative goal attainment values (Fig. 5) are associated with the beginning of a new cycle of goal setting as a result of the higher daily goals. Consequently, it is observed that the participant’s self-efficacy decreases upon experiencing significant increases in the goals in a new MS cycle. This particular observation helped inform the decision on an ambitious yet achievable upper bound for goals in each cycle. The seen trend in the behavioral outcomes and outcome expectancies is gradual increase with the increase in behavior.
Fig. 5:
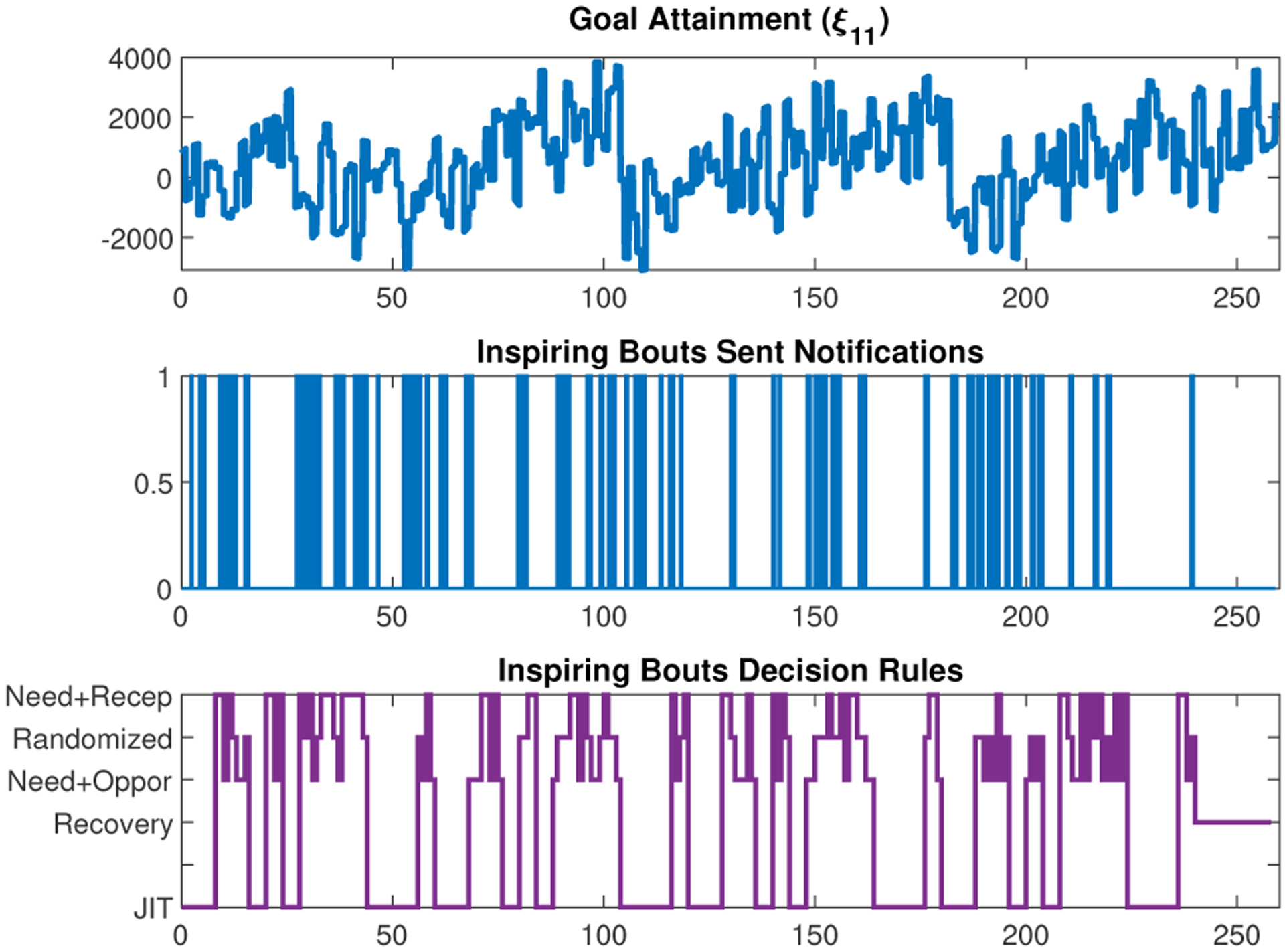
Notifications sent throughout the intervention (middle), the decision rules (bottom) and goal attainment (top) associated with notifications sent each day for the adherent participant in the presence of the disturbances.
As a consequence of positive goal attainment, this participant does not meet the need condition of the decision rules for the majority of the intervention. As a result, this participant receives the least amount of notifications out of the illustrated scenarios (263 notification: 144 randomized and 119 non-randomized). It is also observed that the decision rules work as they are designed; need and opportunity and JIT decision rules offer the least amount of burden when a participant meets the daily goals as shown in Table I. Lastly, when the need and receptivity decision rule (N+R) is followed, the notification rate is noticeably higher than what is seen in the JIT rule. In all decision rules, the rate of observed daily notifications and the total number of notifications are significantly less than during the randomized periods.
TABLE I:
Notification rates (in notifications/day) for each decision rule per scenario.
| Scenario | N+O | N+R | JIT |
|---|---|---|---|
| Adherent with disturbances | 0.50 | 0.84 | 0.51 |
| Non-Adherent with disturbances | 1.8 | 1.8 | 1.3 |
B. Non-adherent Participant: With Disturbances
The non-adherent participant performs worse from an intervention standpoint. As a result, the average step-count for this participant only slightly increases above the baseline by the end of the intervention and the 10,000 steps/day target is never reached (the highest given daily goal is close to 5,700 steps/day). The lower daily goals are a result of the participant having negative goal attainment for 31.2% of the intervention. The negative goal attainment values lead to lower self-efficacy and reduced behavior levels as a consequence. It can also be observed in Fig. 6 that this participant is more sensitive to exogenous disturbances than the adherent participant; self-efficacy and behavioral outcomes drop more significantly when inconvenient circumstances occur.
Fig. 6:
Simulation that illustrates the response of a non-adherent participant to the designed input signals, in the presence of disturbances in the form of perceived barriers/obstacles and bad environmental context
Consequently, contributions from the SE and OL loops to the behavior levels are minimal. This leads to the average level of behavior to decrease closer to the baseline value towards the end of the intervention. This under-performing non-adherent participant is more likely to drop out of the study due to the negative impact on self-efficacy as well as the lower values of behavioral outcomes and outcome expectancies.
The overall number of notifications sent in this scenario is the highest of the two cases (Fig. 7; 459 notifications: 144 randomized and 315 non-randomized). This is to be expected as the participant does not manage to meet the goals for the majority of the intervention; hence, higher notification rates are observed. The notification rates for the three decision rules are all substantially lower than the that of the randomized periods for all simulated scenarios, which shows that the decision rules are working as designed.
Fig. 7:
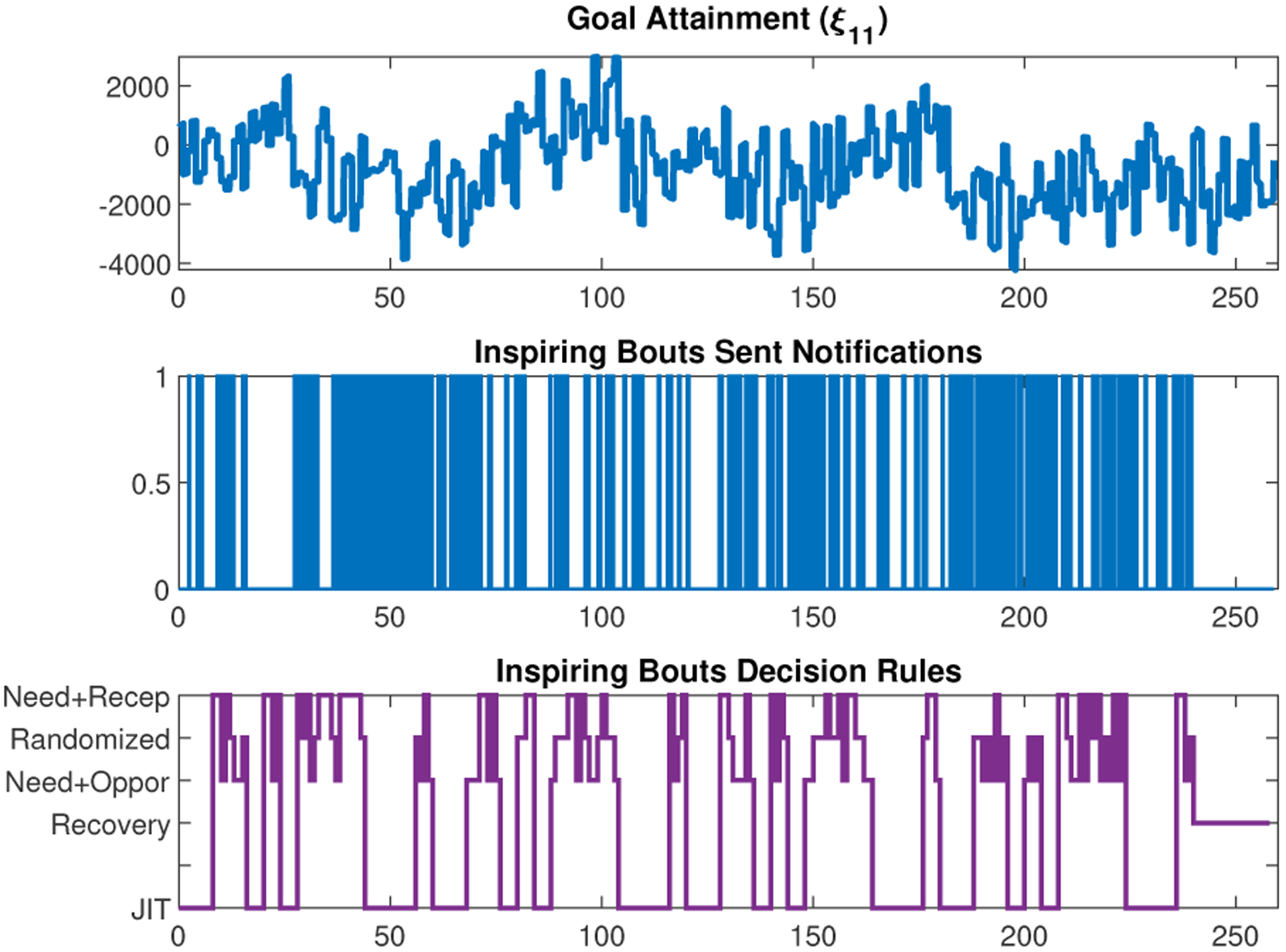
Notifications sent throughout the intervention (middle), the decision rules (bottom) and goal attainment (top) associated with notifications sent each day for the non-adherent participant in the presence of the disturbances.
VI. Conclusions And Future Work
This paper provides proof of concept of the effectiveness of system identification approaches in input signal design for behavioral intervention experiments. Through the utilization of a priori knowledge from previous work and simulation the iterative input signal design process can be optimized to establish behavioral interventions, which provide dynamically informative experimental data covering the important multi-timescale dynamics associated with behavioral change. This is the aim of the Just Walk JITAI, where innovative design of the input signals for goal setting and inspiring bouts allow for systematic examination of behavioral change dynamics at high frequencies (e.g. within-day) while maintaining low burden on participants. In future work methods like pattern recognition will be utilized for the opportunity condition, rather than a randomly generated availability signal. The gathered experimental data should allow for estimation and validation of control-oriented models through sophisticated system identification methods including grey box approaches and Model-on-Demand (MoD; [12]). The estimated idiographic dynamical models can be applied in optimal personalized behavioral interventions through model-based control algorithms like Model Predictive Control (MPC). Furthermore, the estimated models provide insight into control strategies in cases where measurements of some of the psychological constructs (e.g., self-efficacy) are not easily attainable.
The adoption of system identification approaches in behavioral science can lead to a better understanding of the multi-timescale dynamic processes of behavior on an idiographic level, that allows for the provision of intervention support following the notions of just-in-time state. This should maximize the gains from behavioral interventions and allow for fostering healthy behavior in participants. The implementation of judiciously designed, personalized JITAIs for PA on a large scale should improve the life quality and expectancy of participants and the community overall.
ACKNOWLEDGMENT
Support for this research has been provided by the National Institutes of Health (NIH) through grants R01LM013107 and U01CA229445. The opinions expressed in this paper are the authors’ own and do not necessarily reflect the views of NIH.
References
- [1].Booth FW, Roberts CK, and Laye MJ, “Lack of exercise is a major cause of chronic diseases,” Comprehensive physiology, vol. 2, no. 2, p. 1143, 2012. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [2].Saint-Maurice PF, Troiano RP, Bassett J, David R, Graubard BI, Carlson SA, Shiroma EJ, Fulton JE, and Matthews CE, “Association of Daily Step Count and Step Intensity With Mortality Among US Adults,” JAMA, vol. 323, no. 12, pp. 1151–1160, 03 2020. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [3].“Physical activity guidelines for Americans 2nd edition.” [Online]. Available: https://health.gov/sites/default/files/2019-09/Physical_Activity_Guidelines_2nd_edition.pdf#page=56
- [4].Rivera DE, Hekler EB, Savage JS, and Symons Downs D, “Intensively adaptive interventions using control systems engineering: Two illustrative examples,” in Optimization of Behavioral, Biobehavioral, and Biomedical Interventions, Collins LM and Kugler KC, Eds. Springer, 2018, pp. 121–173. [Google Scholar]
- [5].Hekler EB, Klasnja P, Riley WT, Buman MP, Huberty J, Rivera DE, and Martin CA, “Agile science: creating useful products for behavior change in the real world,” Translational Behavioral Medicine, vol. 6, no. 2, pp. 317–328, 02 2016. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [6].Martín CA, Rivera DE, Hekler EB, Riley WT, Buman MP, Adams MA, and Magann AB, “Development of a control-oriented model of Social Cognitive Theory for optimized mHealth behavioral interventions,” IEEE Transactions on Control Systems Technology, vol. 28, no. 2, pp. 331–346, 2020. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [7].Martín CA, Rivera DE, and Hekler EB, “A decision framework for an adaptive behavioral intervention for physical activity using hybrid model predictive control,” in 2016 American Control Conference (ACC), 2016, pp. 3576–3581. [Google Scholar]
- [8].Perski O, Hébert ET, Naughton F, Hekler EB, Brown J, and Businelle MS, “Technology-mediated just-in-time adaptive interventions (jitais) to reduce harmful substance use: A systematic review,” Addiction, pp. 1–22, 2021. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [9].Bandura A, “Human agency in social cognitive theory.” American Psychologist, vol. 44, no. 9, p. 1175–1184, 1989. [DOI] [PubMed] [Google Scholar]
- [10].Phatak SS, Freigoun MT, Martín CA, Rivera DE, Korinek EV, Adams MA, Buman MP, Klasnja P, and Hekler EB, “Modeling individual differences: A case study of the application of system identification for personalizing a physical activity intervention,” Journal of Biomedical Informatics, vol. 79, pp. 82–97, 2018. [DOI] [PubMed] [Google Scholar]
- [11].Rivera DE, Lee H, Mittelmann HD, and Braun MW, “Constrained multisine input signals for plant-friendly identification of chemical process systems,” Journal of Process Control, vol. 19, no. 4, pp. 623–635, 2009. [Google Scholar]
- [12].Braun MW, Rivera DE, and Stenman A, “A Model-on-Demand identification methodology for nonlinear process systems,” Int. J. Control, vol. 74, no. 18, pp. 1708–1717, 2001. [Google Scholar]