

Abstract
In 1990, based on numerical and formal asymptotic analysis, Ori and Piran predicted the existence of selfsimilar spacetimes, called relativistic Larson-Penston solutions, that can be suitably flattened to obtain examples of spacetimes that dynamically form naked singularities from smooth initial data, and solve the radially symmetric Einstein-Euler system. Despite its importance, a rigorous proof of the existence of such spacetimes has remained elusive, in part due to the complications associated with the analysis across the so-called sonic hypersurface. We provide a rigorous mathematical proof. Our strategy is based on a delicate study of nonlinear invariances associated with the underlying non-autonomous dynamical system to which the problem reduces after a selfsimilar reduction. Key technical ingredients are a monotonicity lemma tailored to the problem, an ad hoc shooting method developed to construct a solution connecting the sonic hypersurface to the so-called Friedmann solution, and a nonlinear argument to construct the maximal analytic extension of the solution. Finally, we reformulate the problem in double-null gauge to flatten the selfsimilar profile and thus obtain an asymptotically flat spacetime with an isolated naked singularity.
Keywords: Self-similar solutions, Einstein-Euler system, Implosion, Naked singularities
Introduction
We study the Einstein-Euler system which couples the Einstein field equations to the Euler equations of fluid mechanics. The unknowns are the 4-dimensional Lorentzian spacetime , the fluid pressure p, the mass-density , and the 4-velocity . In an arbitrary coordinate system, the Einstein-Euler equations read
| 1.1 |
| 1.2 |
| 1.3 |
where is the Ricci curvature tensor, the scalar curvature of , and is the energy momentum tensor given by the formula
| 1.4 |
To close the system, we assume the linear equation of state
| 1.5 |
where corresponds to the square of the speed of sound.
The system (1.1)–(1.5) is a fundamental model of a selfgravitating relativistic gas. We are interested in the existence of selfsimilar solutions to (1.1)–(1.5) under the assumption of radial symmetry. This amounts to the existence of a homothetic Killing vector field with the property
| 1.6 |
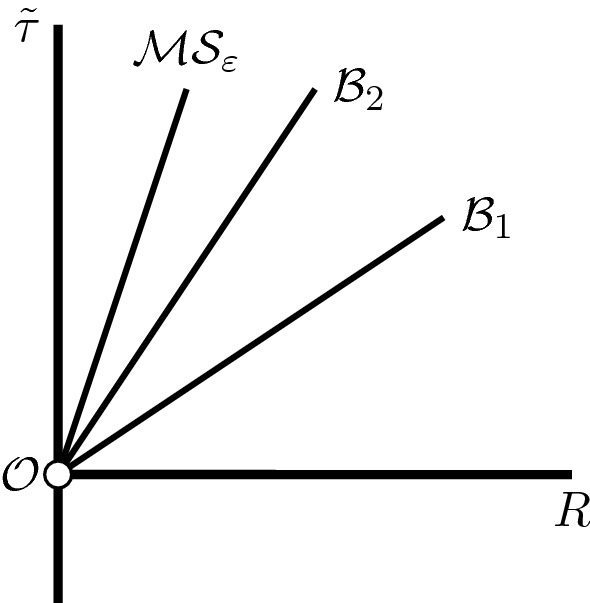
where the left-hand side is the Lie derivative of the metric g. The presence of such a vector field induces a scaling symmetry, which allows us to look for selfsimilar solutions to (1.1)–(1.5). Study of selfsimilar solutions to Einstein-matter systems has a rich history in the physics literature. They in particular provide a way of constructing spacetimes with so-called naked singularities, a notion intimately tied to the validity of the weak cosmic censorship of Penrose [30], see the discussion in [7, 10, 32]. Naked singularities intuitively correspond to spacetime singularities that are “visible" to far away observers, which informally means that there exists a future outgoing null-geodesic “emanating" from the singularity and reaching the asymptotically flat region of the spacetime. We adopt here a precise mathematical definition from the work of Rodnianski and Shlapentokh-Rothman [32, Definition 1.1], which in turn is related to a formulation of weak cosmic censorship by Christodoulou [7].
In the absence of pressure ( in (1.5)) and under the assumption of radial symmetry, the problem simplifies considerably. The corresponding family of solutions was studied by Lemaître [21] and Tolman [34] in early 1930s (see also [1]). In their seminal work from 1939, Oppenheimer and Snyder [25] studied the causal structure of a subclass of Lemaître-Tolman solutions with space-homogeneous densities, thus exhibiting the first example of a dynamically forming (what later became known as) black hole. However, in 1984 Christodoulou [5] showed that, within the larger class of Lemaître-Tolman solutions with space-inhomogeneous densities, black holes are exceptional and instead naked singularities form generically.
Of course, in the context of astrophysics, one expects the role of pressure to be very important in the process of gravitational collapse for relativistic gases. In the late stages of collapse, the core region is expected to be very dense and the linear equation of state (1.5) is commonly used in such a setting, as it is compatible with the requirement that the speed of sound is smaller than the speed of light, . In their pioneering works, Ori and Piran [26–28] found numerically selfsimilar solutions to (1.1)–(1.5), which are the relativistic analogues of the Larson-Penston selfsimilar collapsing solutions to the isothermal Euler-Poisson system, see [15, 20, 31]. Through both numerical and asymptotic analysis methods Ori and Piran investigated the causal structure of such relativistic Larson-Penston solutions, ascertaining the existence of spacetimes with naked singularities when is smaller than a certain value. Our main goal is to justify the findings of Ori and Piran on rigorous mathematical grounds.
Broadly speaking, this manuscript consists of two parts. In the first part, which constitutes the bulk of our work, we construct a selfsimilar solution of the Einstein-Euler system (Sections 3–8), assuming that – the square of the speed of sound – is sufficiently small.
Theorem 1.1
(Existence of the relativistic Larson-Penston spacetimes) For any sufficiently small there exists a radially symmetric real-analytic selfsimilar solution to the Einstein-Euler system with a curvature singularity at the scaling origin and an outgoing null-geodesic emanating from it all the way to infinity. The resulting spacetime is called the relativistic Larson-Penston (RLP) spacetime.
It is not hard to see that the selfsimilar solution constructed in Theorem 1.1 is not asymptotically flat. In the second step (Section 9), using PDE techniques, we flatten the selfsimilar RLP-profile in a region away from the singularity and thus obtain an asymptotically flat solution with a naked singularity. Thus, our main theorem states that in the presence of pressure there do exist examples of naked singularities which form from smooth data.
Theorem 1.2
(Existence of naked singularities) For sufficiently small there exist radially symmetric asymptotically flat solutions to the Einstein-Euler system that form a naked singularity in the sense of [32, Definition 1.1].
Other than the dust-Einstein model mentioned above, we are aware of two other rigorous results on the existence of naked singularities. In 1994 Christodoulou [6] provided a rigorous proof of the existence of radially symmetric solutions to the Einstein-scalar field system, which contain naked singularities (see also [8] for the proof of their instability). Very recently, Rodnianski and Shlapentokh-Rothman [32] proved the existence of solutions to the Einstein-vacuum equations which contain naked singularities and are (necessarily) not radially symmetric.
In the physics literature much attention has been given to selfsimilar solutions and naked singularities for the Einstein-Euler system, see for example [2, 14]. A selfsimilar reduction of the problem was first given in [33]. As explained above, a detailed analysis of the resulting equations, including the discussion of naked singularities, was given in [26–28]. Subsequent to [28], a further analysis of the causal structure, including the nonradial null-geodesics was presented in [19], see also [4]. There exist various approaches to the existence of solutions to the selfsimilar problem, most of them rely on numerics [3, 17, 28]. A dynamical systems approach with a discussion of some qualitative properties of the solutions was developed in [3, 13]. Numerical investigation of the stability of the RLP-spacetimes can be found in [17, 18]. selfsimilar relativistic perfect fluids play an important role in the study of the so-called critical phenomena - we refer to reviews [14, 24].
The proof of Theorem 1.1 relies on a careful study of the nonlinear invariances of the finite-dimensional non-autonomous dynamical system obtained through the selfsimilar reduction. The solutions we construct are real-analytic in a suitable choice of coordinates. A special role is played by the so-called sonic line (sonic point), the boundary of the backward sound cone emanating from the scaling origin . Many difficulties in the proof of Theorem 1.1 originate from possible singularities across this line, which together with the requirement of smoothness, puts severe limitations on the possible space of smooth selfsimilar solutions. We are aware of no general ODE theory for global existence in the presence of singular sonic points. Therefore, our proofs are all based on continuity arguments, where we extract many delicate invariant properties of the nonlinear flow, specific to the ODE system at hand. In particular, the discovery of a crucial monotonicity lemma enables us to apply an ad hoc shooting method, which was developed for the limiting Larson-Penston solution in the non-relativistic context by the authors. From the point of view of fluid mechanics, the singularity at is an imploding one, as the energy density blows up on approach to . It is in particular not a shock singularity.
The asymptotic flattening in Theorem 1.2 requires solving a suitable characteristic problem for the Einstein-Euler system formulated in the double-null gauge. We do this in a semi-infinite characteristic rectangular domain wherefrom the resulting solution can be glued smoothly to the exact selfsimilar solution in the region around the singularity . The proof of Theorem 1.2 is given in Section 9.6.
Due to the complexity of our analysis, in Section 2 we give an extensive overview of our methods and key ideas behind the detailed proofs in Sections 3–9.
Methodology and Outline
Formulation of the Problem (Section 3)
Following [28] it is convenient to work with the comoving coordinates
| 2.7 |
where is the standard metric on , , are local coordinates on , and r is the areal radius. The vector field is chosen in such a way that the four velocity is parallel to . The normalisation condition (1.3) then implies
| 2.8 |
The coordinate R acts as a particle label. The coordinates are then uniquely determined by fixing the remaining gauge freedoms in the problem, the value of and by setting , which states that on the hypersurface the comoving label R coincides with the areal radius.
Introduce the radial velocity
| 2.9 |
the Hawking (also known as Misner-Sharp) mass
| 2.10 |
and the mean density
| 2.11 |
Recalling the equation of state (1.5), the spherically symmetric Einstein-Euler system in comoving coordinates reads (see [12, 23])
| 2.12 |
| 2.13 |
| 2.14 |
| 2.15 |
where we recall (2.11). The well-known Tolman-Oppenheimer-Volkov relation reads , which after plugging in (1.5) further gives the relation
| 2.16 |
Comoving Selfsimilar Formulation
It is straightforward to check that the system (2.12)–(2.15) is invariant under the scaling transformation
| 2.17 |
where the comoving “time" and the particle label R scale according to
| 2.18 |
Motivated by the scaling invariance (2.17)–(2.18), we look for selfsimilar spacetimes of the form
| 2.19 |
| 2.20 |
| 2.21 |
| 2.22 |
| 2.23 |
| 2.24 |
where
| 2.25 |
Associated with the comoving selfsimilar coordinates are the two fundamental unknowns:
| 2.26 |
| 2.27 |
For future use it is convenient to sometimes consider the quantity
| 2.28 |
instead of . Quantity corresponds to the selfsimilar number density, while is referred to as the relative velocity. It is shown in Proposition 3.4 that the radial Einstein-Euler system under the selfsimilar ansatz above reduces to the following system of ODE:
| 2.29 |
| 2.30 |
This formulation of the selfsimilar problem highlights the danger from possible singularities associated with the vanishing of the denominators on the right-hand side of (2.29)–(2.30). Such points play a distinguished role in our analysis, and as we shall show shortly, are unavoidable in the study of physically interesting selfsimilar solutions.
Definition 2.1
(The sonic point) For any smooth solution to (2.29)–(2.30) we refer to a point satisfying
| 2.31 |
as the sonic point.
Schwarzschild Selfsimilar Formulation
The comoving formulation (2.29)–(2.30) as written does not form a closed system of ODE. To do so, we must express the metric coefficients as functions of , which can be done at the expense of working with (or equivalently ) as a further unknown. To avoid this, it is possible to introduce the so-called Schwarzschild selfsimilar coordinate:
| 2.32 |
so that
| 2.33 |
In this coordinate system the problem takes on a form analogous to the Eulerian formulation of the selfsimilar Euler-Poisson system from [15]. It is shown in Lemma 3.5 that the new unknowns
| 2.34 |
solve the system
| 2.35 |
| 2.36 |
where
| 2.37 |
and
| 2.38 |
The Greek letter will always be used to mean (2.38) in the rest of the paper. In this formulation, sonic points correspond to zeroes of , i.e. if is a sonic point in the sense of Definition 2.1, then is a zero of the denominator B.
Friedmann, Far-Field, and the Necessity of the Sonic Point
There are two exact solutions to (2.35)–(2.36). The far-field solution
| 2.39 |
features a density that blows up at and decays to 0 as . On the other hand, the Friedmann solution
| 2.40 |
is bounded at , but the density does not decay as . Our goal is to construct a smooth solution to (2.35)-(2.36) which qualitatively behaves like the far-field solution as and like the Friedmann solution as . We can therefore think of it as a heteroclinic orbit for the dynamical system (2.35)-(2.36). It is then easy to see that any such solution has the property and . By the intermediate value theorem there must exist a point where B vanishes, i.e. a sonic point.
It is important to understand the formal Newtonian limit, which is obtained by letting in (2.35)–(2.36). This yields the system
| 2.41 |
| 2.42 |
which is precisely the selfsimilar formulation of the isothermal Euler-Poisson system. In [15] we showed that there exists a solution to (2.41)–(2.42) satisfying , , , and .1 The behaviour of the relativistic solutions when in the region is modelled on this solution, called the Larson-Penston (LP) solution.
The system (2.35)–(2.37) is a non-autonomous system of ODE which is at the heart of the proof of Theorem 1.1 and is used to show the existence of the RLP-solution in the region . As , we are forced to switch back to a version of the comoving variables in order to extend the solution beyond in a unique way, see the discussion in Section 2.5. A version of the comoving formulation (2.29)–(2.30) plays a crucial role in that extension. In our analysis of the radial null-geodesics (Section 8) and the nonradial ones (Appendix B), we often switch between different choices of coordinates to facilitate our calculations.
Even though the smallness of is crucial for the validity of our estimates, we emphasise that we do not use perturbation theory to construct the relativistic solution, by for example perturbing away from the Newtonian one. Such an argument is a priori challenging due to the singular nature of the sonic point, as well as complications arising from boundary conditions.
We mention that selfsimilar imploding flows for the compressible Euler system, featuring a sonic point, were constructed recently in the pioneering work of Merle, Raphaël, Rodnianski, and Szeftel [22] - here the associated dynamical system is autonomous. In the context of the Euler-Poisson system with polytropic gas law, selfsimilar collapsing solutions featuring a sonic point were recently constructed in [16].
The Sonic Point Analysis (Section 4)
The solution we are trying to construct is on one hand assumed to be smooth, but it also must feature an a priori unknown sonic point, which we name . This is a singular point for the dynamical system and the assumption of smoothness therefore imposes a hierarchy of constraints on the Taylor coefficients of a solution in a neighbourhood of . More precisely, we look for solutions to (2.35)-(2.36) of the form
| 2.43 |
It is clear that the first constraint reads , as the numerator in (2.35) must vanish at for the solution to be smooth. Together with the condition , we can show that for any sufficiently small, is a function of , which converges to as in accordance with the limiting Newtonian problem (2.41)–(2.42). Our goal is to express recursively in terms of , and thus obtain a hierarchy of algebraic relations that allows to compute the Taylor coefficients up to an arbitrary order.
However, an intriguing dichotomy emerges. At the next order, one obtains a cubic equation for , see Lemma 4.7. One of the solutions is a “ghost" solution and therefore unphysical, while the remaining two roots, when real, are both viable candidates for , given as a function of (and therefore ). This is related to an analogous dichotomy in the Newtonian case - where one choice of the root leads to so-called Larson-Penston-type (LP type) solutions, while the other choice of the root leads to Hunter-type solutions. Based on this, for any sufficiently small, we select to correspond to the choice of the branch converging to the LP-type coefficient as . This is a de facto selection principle which allows us to introduce formal Taylor expansions of the relativistic Larson-Penston-type (RLP type), see Definition 4.11. Upon fixing the choice of (and thereby ), all the higher-order coefficients , , are then uniquely determined through a recursive relation, see Section 4.3. We mention that and cease to exist as real numbers before reaches 2 from above, which led us to define , see Lemma 4.10. This should be contrasted to the Newtonian problem where and are real-valued as passes below 22. The existence of a forbidden range for is related to the band structure in the space of all smooth solutions, see [13, 28].
Guided by the intuition developed in the construction of the (non-relativistic) Larson-Penston solution [15], our next goal is to identify the so-called sonic window - a closed interval within which we will find a sonic point for the global solution of the ODE system on . In fact, by Lemma 5.12 and Lemma 5.9, the set and the set are invariant under the flow to the left of the sonic point. Motivated by this, we choose so that the zero order coefficient coincides with the Friedmann solution (2.40): (see (4.245)) and fix for sufficiently small but independent of , so that for some (see (4.285)).
The main result of Section 4 is Theorem 4.18, which states that there exists an sufficiently small such that for all and for any choice of in the sonic window, there in fact exists a local-in-x real analytic solution around . The proof of this theorem relies on a delicate combinatorial argument, where enumeration of indices and N-dependent growth bounds for the coefficients are moved to Appendix A.
Having fixed the sonic window , our strategy is to determine what values of allow for RLP-type solutions that exist on the whole real line. We approach this problem by splitting it into two subquestions. We identify those which give global solutions to the left, i.e. all the way from to , and separately to the right, i.e. on .
The Friedmann Connection (Section 5)
The main goal of Section 5 is to identify a value , so that the associated local solution exists on and is real analytic everywhere.
From the technical point of view the main obstruction to our analysis is the possibility that the flow features more than one sonic point. By the precise analysis around in Section 4 we know that B is strictly positive/negative locally around to the left/right respectively (and vanishes at ). Our strategy is to propagate these signs dynamically. To do so we develop a technical tool, referred to as the monotonicity lemma, even though it is an exact identity, see Lemma 3.7. It is a first order differential equation for a quantity with a source term depending on the solution, but with good sign properties in the regime we are interested in, hence – monotonicity lemma. Here is a factor of B in (2.37): (see Lemmas 3.6–3.7). Roughly speaking, the function f allows us to relate the sign of B to the sign of the difference in a precise dynamic way, so that we eventually show that away from the sonic point and to the left, while and to the right of the sonic point for the relativistic Larson-Penston solution.
To construct the solution to the left of the sonic point we develop a shooting-type method, which we refer to as shooting toward Friedmann. Namely, the requirement of smoothness at is easily seen to imply , which precisely agrees with the value of , see (2.40).
The key idea is to separate the sonic window into the sets of sonic points that launch solutions which either stay above the Friedmann value on its maximum interval of existence or cross it, see Figure 1. This motivates the following definition.
Fig. 1.

Schematic depiction of the shooting argument. Here , . The critical point is obtained by sliding to the left in until we reach the boundary of its first connected component X
Definition 2.2
(, , , and X) Let be a small constant introduced in Section 2.2 (see also Theorem 4.18). For any and we consider the associated RLP-type solution . We introduce the sets
| 2.44 |
| 2.45 |
| 2.46 |
Finally, we introduce the fundamental set given by
| 2.47 |
The basic observation is that solutions that correspond to the set have the property that once they take on value , they never go back up above it. This is a nonlinear invariance of the flow, which guides our shooting argument idea. It is possible to show that both sets and are non-empty. In Lemma 5.9 we show that and that for some , . Intuitively, we then slide down starting from , until we reach the first value of that does not belong to , i.e. we let
| 2.48 |
see Figure 1. This is the candidate for the value of which gives a real-analytic solution on . Using the nonlinear invariances of the flow and its continuity properties, in Proposition 5.15, we show that the solution exists on the semi-open interval .
To show that the solution is indeed analytic all the way to , , and , we adapt the strategy developed for the classical LP solution in [15]. Using the method of upper and lower solutions (Definition 5.23), we show that there exists a choice of such that the solution coincides with a unique real analytic solution to (2.35)–(2.36), with data , , solving from to the right. Detailed account of this strategy is contained in Sections 5.3–5.4. Finally, combining the above results we can prove the central statement of Section 5:
Theorem 2.3
There exists an sufficiently small, such that for any , the solution of RLP-type to (2.35)–(2.36) launched at (defined by (2.48)) extends (to the left) to the closed interval , is real analytic, and satisfies , .
This theorem is formally proved at the very end of Section 5.4.
The Far-Field Connection (Section 6)
By contrast to establishing the existence of the Friedmann connection in Section 5, we show that for any choice of in our sonic window , there exists a global solution to the right, i.e. we prove the following theorem:
Theorem 2.4
Let . There exists an such that the unique RLP-type solution exists globally to the right for all .
The proof relies on a careful study of nonlinear invariances of the flow, and once again the monotonicity properties encoded in Lemma 3.7 play a critical role in our proof. This is highlighted in Lemma 6.3, which allows us to propagate the negativity of the sonic denominator B to the right of the sonic point. Importantly, we may now let defined in (2.48) to obtain a real-analytic RLP-type solution defined globally on . As it turns out, the obtained spacetime is not maximally extended, and to address this issue we need to understand the asymptotic behaviour of our solutions as .
In Lemma 6.5 we show that solutions from Theorem 2.4 honour the asymptotic behaviour
| 2.49 |
hence the name far-field connection, see (2.39). This is however not enough for the purposes of extending the solution beyond , as we also need sharp asymptotic behaviour of the relative velocity W. Working with the nonlinear flow (2.35)–(2.36), in Proposition 6.8 we show that the leading order behaviour of W is given by the relation
| 2.50 |
Maximal Analytic Extension (Section 7)
Asymptotic relations (2.49)–(2.50) suggest that our unknowns are asymptotically “regular" only if thought of as functions of . In fact, it turns out to be more convenient to interpret this in the original comoving selfsimilar variable y, see (2.25). Due to (2.49) and (2.32)–(2.33), it is easy to see that asymptotically
| 2.51 |
Moreover, by (2.49) and (2.34), we have . Furthermore by (3.101) we have the relation
| 2.52 |
As a consequence of (2.49) we then conclude that
| 2.53 |
which implies that the metric g given by (2.7) becomes singular as (or equivalently ). In Section 7 we show that this is merely a coordinate singularity, and the spacetime extends smoothly (in fact analytically in a suitable choice of coordinates) across the surface .
Motivated by the above considerations, we switch to an adapted comoving chart , defined through
| 2.54 |
We introduce the selfsimilar variable
| 2.55 |
which is then easily checked to be equivalent to the change of variables
| 2.56 |
where we recall . To formulate the extension problem, it is natural to define the new variables
| 2.57 |
where we recall the fundamental variables from (2.26)–(2.28). Note that by (2.28) and (2.56) we have . It is shown in Lemma 7.1 that the original system (2.29)–(2.30) in the new variables reads
| 2.58 |
| 2.59 |
| 2.60 |
where
| 2.61 |
The first main result of Section 7 is Theorem 7.4, where we prove the local existence of a real analytic solution in an open neighbourhood of , which provides the local extension of the solution from to . Initial data at are read off from the asymptotic behaviour (2.49)–(2.50), see Remark 7.2. The most important result of the section is the maximal extension theorem of the solution to the negative Y-s:
Theorem 2.5
(Maximal extension) There exists an sufficiently small such that for any there exists a such that the unique solution to the initial value problem (2.58)–(2.60) exists on the interval , and
| 2.62 |
| 2.63 |
| 2.64 |
Fig. 2.

Schematic depiction of the behaviour of and in the maximal extension. As Y approaches from the right, approaches 0 and blows up to
We see from the statement of the theorem that the maximal extension is characterised by the simultaneous blow-up of and at the terminal point . By (2.55), in the adapted comoving chart, the point coincides with the hypersurface
which we refer to as the massive singularity, following the terminology in [28]. The proof of Theorem 2.5 relies on a careful understanding of nonlinear invariances associated with the dynamical system (2.58)–(2.60) and the key dynamic “sandwich" bound
where is small. This is shown in Lemma 7.9. The blow-up proof finally follows from a Ricatti-type ordinary differential inequality for the relative velocity .
In Section 7.4 we compute the sharp asymptotics of and on approach to the massive singularity . This result is stated in Proposition 7.16, which is later crucially used in the study of the causal structure of such a maximally extended solution, where it is in particular shown that the spacetime curvature blows up on approach to the massive singularity.
Remark 2.6
The maximal selfsimilar extension makes sense in the Newtonian limit , which is one of the key observations of Ori and Piran [28]. Our proof of Theorem 2.5 easily extends to the simpler case , which in particular shows that the LP-solutions constructed in [15] have a natural maximal extension in the Lagrangian (comoving) coordinates.
The RLP-Spacetime and Its Causal Structure (Section 8)
As a consequence of Theorems 2.3, 2.4, and 2.5, we can now formally introduce the exactly selfsimilar solution of the Einstein-Euler system by patching the solutions in the subsonic region , the supersonic region , and the extended region . Following Ori and Piran [28], we call this spacetime the relativistic Larson-Penston (RLP) solution3.
Definition 2.7
(-metric) We refer to the 1-parameter family of spherically symmetric selfsimilar spacetimes constructed above as the relativistic Larson-Penston spacetimes. In the adapted comoving coordinates the metric takes the form
| 2.65 |
where the metric coefficients are defined on the connected component of the coordinate plane given by
| 2.66 |
Here
| 2.67 |
where
| 2.68 |
and
| 2.69 |
Metric coefficients for are then defined by expressing them as appropriate functions of and extending to , see Proposition 7.16.
The RLP-spacetime in the original comoving coordinates. In the original comoving coordinates , the metric takes the form
| 2.70 |
It is clear from (2.53) that the metric (2.70) becomes singular across the surface (equivalently ). Nevertheless, away from this surface (i.e. when and ) we can keep using comoving coordinates, whereby we define
| 2.71 |
where we recall (2.55). Therefore the metric coefficients are defined on the union of the connected components of the coordinate plane given by
| 2.72 |
where
Here
and
where , .
Remark 2.8
It is of interest to understand the leading order asymptotic behaviour of the radius as a function of the comoving selfsimilar variable y. It follows from (2.34) and the boundary condition that . Therefore, using (2.33) it is easy to see that the leading order behaviour of at is of the form
| 2.73 |
for some . It follows in particular that is only at . The selfsimilar reduction of the constraint equation (2.15) reads (see (3.95)). Using this and (2.73), it then follows
| 2.74 |
which shows that the metric g (2.7) is singular at .
This singularity is not geometric, but instead caused by the Friedmann-like behaviour of the relative velocity W at , see (2.40). It captures an important difference between the comoving and the Schwarzschild coordinates at the centre of symmetry . It can be checked that the space-time is regular at the centre of symmetry by switching to the coordinate. The same phenomenon occurs in the Newtonian setting, where it can be shown that the map associated with the LP-solution is exactly and therefore is not smooth at the labelling origin .
Remark 2.9
Note that the trace of is easily evaluated
On the other hand, the trace of the left-hand side of (1.1) is exactly , and therefore the Ricci scalar of any classical solution of (1.1)–(1.5) satisfies the relation
| 2.75 |
This relation also implies that the blow-up of the Ricci scalar is equivalent to the blow up of the mass-energy density when .
Remark 2.10
In Christodolou’s work [6], across the boundary of the backward light cone emanating from the first singularity, the selfsimilar solution has finite regularity (measured in the Hölder class). This is to be contrasted with the RLP solution which remains real analytic across both characteristic cones - the sonic line and the light cone.
The Outgoing Null-Geodesic
The maximally extended RLP spacetime constructed above has two singular boundary components - the scaling origin and the massive singularity introduced in Section 2.5, see Figure 3. They are very different in nature, as the density (and the curvature components) blow up at two distinct rates.
Fig. 3.
Schematic depiction of the outgoing null-geodesics , , and the massive singularity
The main result of Section 8 states that there exist an outgoing radial null-geodesic (RNG) emanating from the scaling origin and reaching infinity. Following Ori and Piran we look for a so-called simple RNG:
Definition 2.11
(Simple radial null-geodesics) An RNG of the form
| 2.76 |
is called a simple radial null-geodesic (simple RNG).
Then the key result we prove is the following theorem.
Theorem 2.12
(Existence of global outgoing simple RNG-s) There exists an sufficiently small so that for any there exist at least two and at most finitely many outgoing simple RNG-s emanating out of the singularity (0, 0). In other words, there exist
| 2.77 |
so that the associated simple RNG-s are given by
| 2.78 |
The proof relies on a beautiful idea of Ori and Piran [28], which we make rigorous. Namely, one can show that the slopes of outgoing simple RNG-s must correspond to roots of a certain real-analytic function, see Lemma 8.2. Using the sharp asymptotic behaviour of the metric coefficients, brought about through our analysis in Sections 6–7, we can prove that this function converges to negative values at and . On the other hand, by the local existence theory for the ODE-system (2.58)–(2.60), we can also ascertain the function in question peaks above 0 for a . Therefore, by the intermediate value theorem, we conclude the proof of Theorem 2.12, see Section 8, immediately after Proposition 8.4.
Informally, the null-hypersurface is the “first" outgoing null-curve emanating from the singular scaling origin and reaching the infinity. It is easy to see that r grows to along . Since the spacetime is not asymptotically flat, we perform a suitable truncation in Section 9 in order to interpret as a naked singularity.
The maximal extension we construct is unique only if we insist on it being selfsimilar, otherwise there could exist other extensions in the causal future of . Nevertheless, in our analysis the role of the massive singularity is important, as we use the sharp blow-up asymptotics of our unknowns to run the intermediate value theorem-argument above. Conceptually, has a natural Newtonian limit as , see Remark 2.6, which makes it a useful object for our analysis.
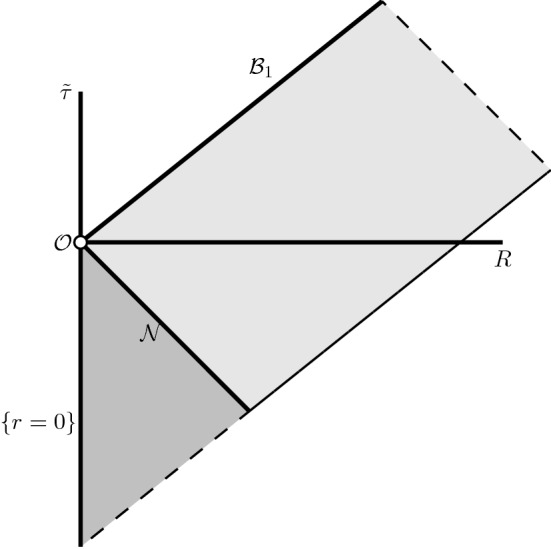
In the remainder of Section 8 we give a detailed account of radial null-geodesics, showing in particular that there is a unique ingoing null-geodesic emanating from the scaling origin to the past, see Figure 4. This is the boundary of the backward light cone “emanating" from the scaling origin. Following the terminology in [6], it splits the spacetime into the exterior region (in the future of ) and the interior region (in the past of ), see Definition 8.6 and Figure 5. Moreover, the sonic line is contained strictly in the interior region. The complete analysis of nonradial null-geodesics is given in Appendix B.
Fig. 4.

Schematic depiction of the ingoing null-curve and the sonic line. The spacetime is smooth across both surfaces
Fig. 5.
Schematic depiction of the interior (dark grey) and the exterior (light grey) region, see Definition 8.6
Double Null Gauge, Asymptotic Flattening, and Naked Singularities (Section 9)
The final step in the proof of Theorem 1.2 is to truncate the profile away from the scaling origin and glue it to the already constructed selfsimilar solution. To do that we set up this problem in the double-null gauge:
| 2.79 |
where corresponds to outgoing null-surfaces and to the ingoing null-surfaces. A similar procedure for the scalar field model was implemented in [6], however due to the complications associated with the Euler evolution, a mere cut-off argument connecting the “inner region" to pure vacuum as we approach null-infinity is hard to do. Instead, we carefully design function spaces that capture the asymptotic decay of the fluid density toward future null-infinity in a way that is both consistent with the asymptotic flatness, and can be propagated dynamically.
Formulation of the Problem in Double-Null Gauge
In addition to the unknowns associated with the fluid, the metric unknowns are the conformal factor and the areal radius . Clearly,
| 2.80 |
Let be the components of the velocity 4-vector u in the frame , where , , describe the generators of some local coordinates on . We have , . The normalisation condition (1.3) in the double-null gauge reads
| 2.81 |
which therefore equivalently reads
| 2.82 |
Lemma 2.13
(Einstein-Euler system in double-null gauge) In the double-null gauge (2.79), the Einstein field equations take the form
| 2.83 |
| 2.84 |
| 2.85 |
| 2.86 |
Moreover, the components of the energy-momentum tensor satisfy
| 2.87 |
| 2.88 |
where the energy-momentum tensor is given by the formulas
| 2.89 |
| 2.90 |
Moreover, its components are related through the algebraic relation
| 2.91 |
Proof
The proof is a straightforward calculation and is given in Appendix C.
The Characteristic Cauchy Problem and Asymptotic Flattening
The idea is to choose a point in the exterior region (recall Figure 5) and solve the Einstein-Euler system in an infinite semi-rectangular domain (in the -plane) depicted in Figure 6. We normalise the choice of the double-null coordinates by making the outgoing curve in the RLP-spacetime (see Figures 4–5) correspond to the level set, and the ingoing curve (see Figure 5) to the level set. We have the freedom to prescribe the data along the ingoing boundary and the outgoing boundary . On we demand that data be given by the restriction of the selfsimilar RLP solution to , and on the outgoing piece we make the data exactly selfsimilar on a subinterval for some . On the remaining part of the outgoing boundary , we prescribe asymptotically flat data.
Fig. 6.

The grey shaded area is the region , where the truncation of the selfsimilar profile takes place. Data are prescribed on the two characteristic surfaces and
The key result of Section 9 is Theorem 9.4, which states that the above described PDE is well-posed on , if we choose sufficiently small. We are not aware of such a well-posedness result for the Einstein-Euler system in the double-null gauge in the literature, and we therefore carefully develop the necessary theory. Precise statements are provided in Section 9.2. The idea is standard and relies on the method of characteristics. However, to make it work we rely on an effective “diagonalisation" of the Euler equations (2.87)–(2.88), which replaces these equations by two transport equations for the new unknowns and , see Lemma 9.1. This change of variables highlights the role of the acoustic cone and allows us to track the acoustic domain of dependence by following the characteristics, see Figure 6. The analysis of the fluid characteristics is presented in Section 9.3. Various a priori bounds are given in Section 9.4. In Section 9.5 we finally introduce an iteration procedure and prove Theorem 9.4.
Formation of Naked Singularities: Proof of Theorem 1.2
Since the data on and the portion of with agrees with the RLP-solution, the solution must, by the finite-speed of propagation, coincide with the exact RLP solution in the region depicted in Figure 7. By uniqueness the solution extends smoothly (in fact analytically) to the exact RLP-solution in the past of , all the way to the regular centre .
Fig. 7.

The light grey shaded area is the region , where the truncated solution from Theorem 9.4 coincides with the exact selfsimilar solution
The future boundary of the maximal development is precisely the surface , the Cauchy horizon for the new spacetime. The boundary of the null-cone corresponding to is complete, and we show in Section 9.6 that for any sequence of points with approaching infinity, the affine length of maximal future-oriented ingoing geodesics launched from and normalised so that the tangent vector corresponds to , is bounded by a constant, uniformly-in-n. This shows that the future null-infinity is incomplete in the sense of [32, Definition 1.1], thus completing the proof of Theorem 1.2, see the Penrose diagram, Figure 8.
Fig. 8.

Penrose diagram of our spacetime with an incomplete future null-infinity
Radially Symmetric Einstein-Euler System in Comoving Coordinates
Selfsimilar Comoving Coordinates
We plug in (2.19)–(2.24) into (2.12)–(2.15) and obtain the selfsimilar formulation of the Einstein-Euler system:
| 3.92 |
| 3.93 |
| 3.94 |
| 3.95 |
Remark 3.1
Recall that the radial velocity satisfies and therefore
| 3.96 |
From (3.92), (3.93), and (3.96) we obtain
and therefore
| 3.97 |
For smooth solutions with strictly positive density , an explicit integration of the identity (3.97) gives the formula
| 3.98 |
for some constant .
Remark 3.2
(Gauge normalisation) From (2.16) we also obtain
| 3.99 |
For any given we finally fix the remaining freedom in the problem by setting
| 3.100 |
Upon integrating (3.99) we obtain the identity
| 3.101 |
Before we reduce the selfsimilar formulation (3.92)–(3.95) to a suitable nonautonomous ODE system, we first prove an auxiliary lemma.
Lemma 3.3
Let be a smooth solution to (3.92)–(3.95).
- (a)
- The following important relationship holds:
with defined by (2.27).3.102 - (b)
- (Local expression for the mean density) The selfsimilar mean density defined by
satisfies the relation3.103 3.104 - (c)
- (d)
- The metric coefficient satisfies the formula
3.107
Proof
Proof of part (a). This is a trivial consequence of (3.96) and (2.27).
Proof of part (b). After multiplying (3.92) by we obtain
| 3.108 |
| 3.109 |
| 3.110 |
where in the second line we used (which follows from (3.96)) and in the last line the identity
which uses the field equation (3.99). After integrating over the interval [0, y] and integrating-by-parts, we obtain
| 3.111 |
where we have used (2.27). Hence dividing by we obtain (3.104).
Proof of part (c). From (3.105) and (3.104) we immediately have
| 3.112 |
where we have used (3.101).
Proof of part (d). The formula is a simple consequence of (3.95), (3.96), and (3.104).
Proposition 3.4
(The ODE system in comoving selfsimilar coordinates) Let be a smooth solution to (3.92)–(3.95). Then the pair solves the system (2.29)–(2.30), where are defined in (2.26)–(2.27).
Proof
A routine calculation starting from (3.92) and (3.94) (these can be thought of as the continuity and the momentum equation respectively) gives:
| 3.113 |
| 3.114 |
We may rewrite (3.113)–(3.114) in the form
| 3.115 |
| 3.116 |
With (3.105) in mind, equations (3.115)–(3.116) take the form
| 3.117 |
| 3.118 |
where K is given by (3.105) and by (3.103). Equations (2.29)–(2.30) now follow from (2.26) and parts (b) and (c) of Lemma 3.3.
Selfsimilar Schwarzschild Coordinates
We recall the selfsimilar Schwarzschild coordinate introduced in (2.32).
Lemma 3.5
(Selfsimilar Schwarzschild formulation) Let be a smooth solution to (3.117)–(3.118). Then the variables defined by (2.34) solve the system (2.35)–(2.36), with B given by (2.37) and .
Proof
With the above notation and Lemma 3.3 we have . It is straightforward to see that the system (3.117)–(3.118) transforms into
| 3.119 |
| 3.120 |
From (2.33), the constraint equation (3.95), and (2.27)
| 3.121 |
where we have slightly abused notation by letting . Therefore
| 3.122 |
where we have used (3.101). Plugging this back into (3.119)–(3.119), the claim follows.
Lemma 3.6
(Algebraic structure of the sonic denominator B) Consider the denominator defined in (2.37). We may factorise B in the form
| 3.123 |
where
| 3.124 |
| 3.125 |
Moreover,
| 3.126 |
and
| 3.127 |
Proof
From (2.37) it is clear that we may view as a quadratic polynomial in W:
Solving for W, we obtain two roots, which when multiplied by x give
| 3.128 |
We now observe from (3.124)–(3.125) that the positive solution corresponds to and the negative one to . This in turn immediately gives (3.123). Property (3.126) is obvious from (3.124)–(3.125). Finally, to show (3.127) observe that solves
We differentiate the above equality, regroup terms and obtain (3.127).
The Monotonicity Lemma
Controlling the sonic denominator B from below will be one of the central technical challenges in our analysis. From Lemma 3.6 it is clear that this can be accomplished by tracking the quantity . A related quantity, of fundamental importance in our analysis is given by
| 3.129 |
The goal of the next lemma is to derive a first order ODE satisfied by f, assuming that we have a smooth solution to the system (2.35)–(2.36). This lemma will play a central role in our analysis.
Lemma 3.7
Let be a smooth solution to the selfsimilar Einstein-Euler system (2.35)–(2.36) on some interval , and let f be given by (3.129). Then, the function f satisfies the ODE
| 3.130 |
where
and
| 3.131 |
| 3.132 |
| 3.133 |
| 3.134 |
| 3.135 |
Proof
Since , the goal is to find the desirable form (3.130) by using the dynamics of and (3.127) and (2.35). The factorisation of the denominator B in terms of and H given in (3.123) will be importantly used in the derivation.
Using (3.123) and , we first rewrite as
Using further (3.127), it leads to
| 3.136 |
| 3.137 |
| 3.138 |
(3.136) is the form of , and it corresponds to the first term of in (3.131).
We next examine (3.138). Using (3.125), we see that
| 3.139 |
Then the first term corresponds to the first term of in (3.133). The second term will be combined together with the second line (3.137).
Let us rewrite -(3.137) as
| 3.140 |
where Z is given in (3.135) and the numerator reads as
| 3.141 |
| 3.142 |
| 3.143 |
| 3.144 |
| 3.145 |
We first observe that (3.145) can be written into the form of :
| 3.146 |
| 3.147 |
where the first line corresponds to the first term of in (3.132) and the second line corresponds to the second term of in (3.133).
We next examine (3.143) and (3.144). Using (3.125) to replace H, and (3.126) to replace , and writing to replace , we arrive at
| 3.148 |
| 3.149 |
| 3.150 |
| 3.151 |
| 3.152 |
| 3.153 |
where
| 3.154 |
| 3.155 |
| 3.156 |
| 3.157 |
| 3.158 |
| 3.159 |
| 3.160 |
Now (3.159) corresponds to the second term of in (3.131) and (3.160) corresponds to the last three terms of in (3.132). It remains to check the formula for . To this end, we now group (3.149)–(3.153) into term and terms:
| 3.161 |
| 3.162 |
| 3.163 |
| 3.164 |
| 3.165 |
| 3.166 |
| 3.167 |
This completes the proof.
Corollary 3.8
Let be a smooth solution to the selfsimilar Einstein-Euler system (2.35)–(2.36) on some interval . Then for any , , we have the formula
| 3.168 |
Proof
The proof follows by applying the integrating factor method to (3.130).
Lemma 3.9
(Sign properties of b) Assume that and . Then there exists an sufficiently small such that for all the following statements hold:
- (a)
- For any
3.169 - (b)
- Furthermore,
3.170
Proof
The assumptions of the lemma and the decomposition (3.123) imply that and .
Proof of part (a). The negativity of is obvious from (3.133) and the obvious bound for sufficiently small.
Proof of part (b). Let be the larger of the two roots of the quadratic polynomial , which is given by
It is easily checked that there exists an such that for all and in particular
for . On the other hand,
for and the claim follows from (3.134).
The Sonic Point Analysis
It turns out that for purposes of homogeneity, it is more convenient to work with rescaled unknowns where the sonic point is pulled-back to a fixed value 1. Namely, we introduce the change of variables:
| 4.171 |
so that the sonic point is mapped to . It is then easily checked from (2.35)–(2.36) that solves
| 4.172 |
| 4.173 |
where
| 4.174 |
We introduce
| 4.175 |
we look for solutions to (4.172)-(4.173) of the form
| 4.176 |
We observe that there is a simple relation between the formal Taylor coefficients of and :
| 4.177 |
Sonic Point Conditions
Lemma 4.1
(Sonic conditions) There exists a small such that for all and all there exists a continuously differentiable curve such that
.
.
.
.
Proof
Fix an . Consider a small neighbourhood of , open rectangle , and a continuously differentiable function defined by
| 4.178 |
where we recall . Then the sonic point conditions and with reduce to and moreover we have . Clearly h is continuously differentiable in all arguments. Observe that
| 4.179 |
from which we have
| 4.180 |
Therefore, by the implicit function theorem, we deduce that there exists an open interval of and a unique continuously differential function such that and for all . Moreover, we have
| 4.181 |
where
| 4.182 |
When ,
| 4.183 |
The derivative of the map is and the function is therefore strictly increasing for . It is easy to check that the value at is negative, and therefore there exists a constant such that for all . In particular, there exists a sufficiently small and a constant such that
We let
| 4.184 |
Remark 4.2
(The map is decreasing) In order to examine the behaviour of as a function of for any fixed , we rewrite the relation in the form
Upon taking the derivative of the above, we easily see that . In fact, we have where from (4.178), and is given in (4.179).
For a given function f, we write , , to denote the M-th Taylor coefficient in the expansion of f around the sonic point . In particular,
We set for .
Formula of Faa Di Bruno. Given two functions f, g with formula power series expansions
| 4.185 |
we can compute the formal Taylor series expansion of the composition via
| 4.186 |
where
| 4.187 |
and
| 4.188 |
An element of encodes the partitions of the first n numbers into classes of cardinality i for . Observe that by necessity
To see this, suppose for some . Then , which leads to . But this is impossible if .
Now
| 4.189 |
where
| 4.190 |
Here . Then we may write B as
| 4.191 |
| 4.192 |
| 4.193 |
so that
| 4.194 |
Lemma 4.3
For any , the following formulas hold:
| 4.195 |
and
| 4.196 |
where we recall for .
Proof
Proof of (4.195). We now plug (4.176) into
| 4.197 |
| 4.198 |
(4.197) reads as
Comparing the coefficients, we obtain (4.195).
Proof of (4.196). Since , we can expand as
which leads to (4.196).
Remark 4.4
obtained in Lemma 4.1 satisfy the sonic conditions:
| 4.199 |
and it is easy to verify that for such choice of , the relations (4.195) and (4.196) trivially hold. Moreover, with (4.199), there are no in (4.195) and (4.196).
Remark 4.5
To determine , we record (4.195) and (4.196):
| 4.200 |
and
| 4.201 |
where we have used the sonic conditions (4.199). Recalling from (4.190) and (4.194)
| 4.202 |
| 4.203 |
we see that for general nonzero , (4.200) is linear in and quadratic in and (4.201) is linear in and quadratic in . On the other hand, when , since , , , (4.200) becomes
and (4.201) becomes
Thus by using , we see that (4.200) and (4.201) are reduced to
| 4.204 |
| 4.205 |
which are the the sonic point conditions satisfied in the Newtonian limit, see [15]. In general, there are two pairs of solutions to (4.204)-(4.205), one is of Larson-Penston type given by and the other one is of Hunter type given by .
In the following, we will show that there exists a continuously differentiable curve satisfying (4.200)–(4.201), which at agrees precisely with the values of associated with the (Newtonian) Larson-Penston solution, namely for .
Lemma 4.6
(RLP conditions) Let be fixed and let be as obtained in Lemma 4.1. Then there exists an such that there exists a continuously differentiable curve , such that
Proof
As in Lemma 4.1 we will use the implicit function theorem. To this end, consider a small neighborhood of and introduce as
| 4.206 |
where
| 4.207 |
so that (4.200) and (4.201) are equivalent to . It is clear that is continuously differentiable in all arguments and . We next compute the Jacobi matrix
| 4.208 |
where
and
Using , , , , , and , we evaluate the above at
The Jacobian at is
| 4.209 |
and thus, is invertible in sufficiently small neighborhood of for any fixed . Now by the implicit function theorem, we deduce that there exists an open interval of and unique continuously differential functions , such that , and for all .
It is evident that and become degenerate at . In particular, when , the corresponding and for the LP-type and the Hunter-type solutions coincide precisely at , while they are well-defined for further values of below 2, see [15]. Interestingly this feature does not persist for . In fact, we will show that and cease to exist as real numbers before reaches 2 from above. To this end, we first derive the algebraic equation satisfied by .
Lemma 4.7
(The cubic equation for ) The Taylor coefficient is a root of the cubic polynomial
| 4.210 |
where , are real-valued continuous functions of given in (4.221)–(4.224) below. Moreover, there exists a constant and such that for all and any , we have , . In particular any root of is not zero for .
Proof
Note that (4.201) can be rearranged as
| 4.211 |
Rewrite (4.200) as
| 4.212 |
and (4.211) as
| 4.213 |
We would like to derive an algebraic equation for . To this end, write (4.213) and (4.212) as
| 4.214 |
where
| 4.215 |
| 4.216 |
We observe that we may write , where
| 4.217 |
If we let
| 4.218 |
then (4.212) can be rewritten in the form
| 4.219 |
with f, .b, a, d as above. Now replace in (4.219) using the relation (4.214):
Multiply :
Note that the highest order term is not present. Rearrange similar terms to conclude the identity
| 4.220 |
where
| 4.221 |
| 4.222 |
| 4.223 |
| 4.224 |
By (4.224), the sign of is the same as the sign of . We now use
where we have used in the last line. Now
and
Hence
Since for ,
| 4.225 |
From (4.215)–(4.217) it is easy to see that
| 4.226 |
| 4.227 |
| 4.228 |
This then implies
| 4.229 |
which shows the uniform positivity and boundedness of for sufficiently small . Upon dividing (4.220) by we finally conclude the proof of the lemma.
Remark 4.8
In the formal Newtonian limit , the cubic equation reduces to
| 4.230 |
The root corresponds to the Hunter-type, is of the LP-type, and is the Newtonian ghost solution, see [15].
Relativistic Larson-Penston-Type Solutions
By Lemma 4.7 we know that there are in general three complex roots of (4.210) giving possible values for . One of those roots is a “ghost root" and is discarded as unphysical solution of (4.210). More precisely, in the Newtonian limit such a spurious root corresponds to the value . Our goal is to first mod out such a solution by using the implicit function theorem to construct a curve of spurious solutions agreeing with when .
Lemma 4.9
(Ghost root) The cubic polynomial P introduced in Lemma 4.7 can be factorised in the form
| 4.231 |
where is a real valued function of and Q is a quadratic polynomial given by
| 4.232 |
Proof
We differentiate (4.210) to obtain
| 4.233 |
The implicit function theorem implies the existence of a unique -parametrised curve
| 4.234 |
satisfying . Identity (4.231) can now be checked directly, keeping in mind (4.232).
The discriminant of Q is given by
Lemma 4.10
(Definition of ) There exists a continuous curve such that
| 4.235 |
| 4.236 |
| 4.237 |
Moreover, for any there exists a constant such that for all
| 4.238 |
When the rate of convergence changes and there exists a constant such that
| 4.239 |
Proof
Step 1. Existence of . From the asymptotic formulas (4.229) and (4.234) it is clear that for all we have
| 4.240 |
and therefore
However, by Lemma 4.7 we know that for some positive constant . Choosing such that , we see that . On the other hand, for any for some small, but fixed , we see that . Therefore, by the intermediate value property, there exists an such that . Let be the largest such - it is clear from the construction that the properties (4.235)–(4.236) are satisfied.
Step 2. Asymptotic behaviour of . From (4.240), the identity
| 4.241 |
and Lemma 4.7 we easily conclude (4.237).
Step 3. Continuity properties of the map . Fix an . Then
| 4.242 |
By (4.240) we have . For (ii),
| 4.243 |
by (4.229) and (4.240). Therefore, the bound (4.238) follows.
If we now let , since by definition , we have
| 4.244 |
where we have used (4.237) and Lemma 4.7. This proves (4.239).
Of special importance in our analysis is the Friedmann solution, which has the property that for any . By Lemma 4.1 there exists a continuously differentiable curve defined through the property
| 4.245 |
Since , we conclude from Lemma 4.1 that
| 4.246 |
With above preparations in place, we are now ready to define what we mean by a solution of the relativistic Larson-Penston type.
Definition 4.11
(Solutions of RLP-type) Let be given by Lemma 4.7 and let . We say that the sequence is of relativistic Larson-Penston (RLP)-type if for all
| 4.247 |
the coefficients satisfy the recursive relations (4.195)–(4.196), is the root of the quadratic polynomial Q (4.232) given by
| 4.248 |
and is given as a function of and via (4.213).
Remark 4.12
For all it is clear from the proof of the lemma that the following bound holds in the interval :
| 4.249 |
High-Order Taylor Coefficients
We now consider (4.195) and (4.196).
Lemma 4.13
Let . Then the following holds
| 4.250 |
Here
| 4.251 |
where
and
Proof
We first observe that there are no terms involving in (4.195) and (4.196) due to the sonic conditions (4.199) (cf. Remark 4.4 and see the cancelation below). To prove the lemma, we isolate all the coefficients in and that contain the top order coefficients . For , from (4.190) we have
| 4.252 |
where we recall for , in particular and therefore there are no terms involving in the summation term. For , from (4.194), we have
| 4.253 |
Using (4.252) and (4.253), we can isolate all the coefficients in (4.195) that contain contributions from as follows:
 |
4.254 |
where
| 4.255 |
and
| 4.256 |
Here we recall the definitions of in (4.190) and in (4.203) as well as the sonic conditions in (4.199). Note that we have also used (4.202) above.
Following the same procedure, we now isolate all the coefficients in (4.196) that contain contributions from .
 |
4.257 |
where
| 4.258 |
and
| 4.259 |
This completes the proof.
Let be a sufficiently small number independent of to be fixed later in Section 4.5.
Lemma 4.14
Let be given. Then the components of the matrix satisfy the following
| 4.260 |
| 4.261 |
| 4.262 |
| 4.263 |
In particular, the matrix is invertible for all sufficiently small and . Moreover, the Taylor coefficients , , satisfy the recursive relationship
| 4.264 |
| 4.265 |
where the source terms , , are given by Lemma 4.13.
Proof
We rearrange terms in of Lemma 4.13 as
From (4.199), equations (4.202)–(4.203) and Lemmas 4.1, 4.6, we have the relations
and therefore
Since , and , the claimed behavior of follows.
Since and , the determinant of has a lower bound
for some universal constant . For a sufficiently small we have for and . We see that and hence is invertible for all with chosen sufficiently small. It immediately follows that . Since is invertible, relations (4.264)–(4.265) follow by multiplying (4.250) by from the left.
Remark 4.15
A simple consequence of the previous lemma is the existence of a universal constant such that for any and sufficiently small the following bounds hold:
| 4.266 |
| 4.267 |
Remark 4.16
It is a routine to check
| 4.268 |
| 4.269 |
for any .
Remark 4.17
In Lemma 4.14, the lower bound for the -interval has been chosen for convenience to ensure disturbance of the coefficients to the corresponding ones to LP type solutions. It can be relaxed to by replacing by . See the change of the distance of near in Lemma 4.10.
Series Convergence and Local Existence Around a Sonic Point
Theorem 4.18
(Local existence around the sonic point) There exist an and sufficiently small such that for all and all the sequence of RLP-type (see Definition 4.11) has the following property: the formal power series
| 4.270 |
converge for all and functions and are real analytic inside . We can differentiate the infinite sums term by term, the pair solves (4.172)–(4.173) for , and is strictly positive for .
Proof
The proof is analogous to Theorem 2.10 of [15]. By Lemma A.9, using , there exists such that
when . The claim follows by the comparison test. The real analyticity and differentiability statements are clear. Recalling (4.193), we may rewrite B as
| 4.271 |
| 4.272 |
for all sufficiently small , where
Therefore, it is now easy to see that for all sufficiently small and for sufficiently small, the function for all and . As a consequence, and are indeed the solutions as can be seen by plugging the infinite series (4.270) into (4.197) and (4.198).
Lemma 4.19
There exist an and sufficiently small such that for any and for all the sequence of RLP-type (see Definition 4.11) has the following property: There exists a constant such that for all the bounds , , , hold and
| 4.273 |
| 4.274 |
In particular, the formal power series
converge for all z satisfying . Moreover, the function is and the derivatives and are given by the infinite series above.
Proof
From Lemma 4.1 and Lemma 4.6, and , , and it is clear that , , , for and for all sufficiently small . For , and are recursively given by differentiating the expression in (4.264) and (4.265):
| 4.275 |
| 4.276 |
When , the claim immediately follows. For , we will apply the same induction argument used for bounds. To this end, we first observe that from Lemma 4.13 and Lemma 4.14
| 4.277 |
| 4.278 |
| 4.279 |
leading to
Hence using Lemmas A.8 and A.9,
| 4.280 |
We now recall that and consist of sum and product of polynomials in and power functions of . When we differentiate with respect to , at most one term indexed by or , is differentiated. In particular, the same combinatorial structure in the problem is maintained and the same inductive proof relying on the already established bounds (1.828) and (1.829) gives (4.273) and (4.274). The remaining conclusions now follow easily.
The Sonic Window and
The goal of this subsection is to define and to define the sonic window, which serves as the basic interval in our shooting method in the next section. We begin with the following lemma.
Lemma 4.20
Consider the RLP type solution constructed in Theorem 4.18. There exist a small constant independent of and such that for
for all sufficiently small . Here we recall .
Proof
For any , we Taylor-expand in z around :
| 4.281 |
for some . We note that and . Let be a small constant independent of to be fixed and set . Then we have
| 4.282 |
see the end of Remark 4.5. On the other hand, from (4.269) we have
| 4.283 |
Now let
Observe that by (4.283) for sufficiently small. We now claim that there exists a small enough such that for all sufficiently small . Suppose not. Then for all and for some , . Thus there exists so that , but this is impossible because of (4.283) and the continuity of . Now the Taylor expansion (4.281) at gives rise to
| 4.284 |
from which we deduce for all sufficiently small .
We now define
| 4.285 |
where is given in Lemma 4.20. We observe that by construction is independent of . We are ready to introduce the sonic window:
Definition 4.21
(The sonic window) For any we refer to the interval as the sonic window. We often drop the -dependence when the is fixed.
Remark 4.22
Observe that by construction, the sonic window is a strict subset of the interval [2, 3], while the interval coincides with the interval [2, 3] when . The latter is precisely the range of possible sonic points within which we found the Newtonian Larson-Penston solution in [15] and our new sonic window shows that the lower bound can be improved to even for the Newtonian problem.
For future use in Sections 5 and 6, we analyse the behaviour of and near the sonic point .
Lemma 4.23
(Initialisation) Let , where is a sufficiently small constant given by Theorem 4.18. There exist a and such that and for any , the unique local RLP-type solution associated to given by Theorem 4.18, satisfies the bounds
- (a)
4.286 4.287 - (b)
4.288 4.289 - (c)
- Moreover, the following bound holds
4.290
Proof
Proof of part (a). Let . Since g is a smooth function of and W, by Theorem 4.18, g is smooth near the sonic point. Note that from Lemma 4.1. Since , using Lemma 4.1, Lemma 4.6 and (3.127), we deduce that
for all sufficiently small . Therefore, g is locally strictly increasing and (4.286) and (4.287) hold for some .
Proof of part (b). Since at , we use this and the formula (3.127) to conclude
| 4.291 |
where we recall (2.43). By Remark 4.5 and (4.177), we have and . Plugging this into the above expression, we conclude that
Similarly, and thus using (see (4.268)) and , we have
and hence for all . Since is uniformly continuous, there exists a such that
| 4.292 |
for all .
We now Taylor-expand f at to obtain
for some between and x. For and for some we have
Therefore we deduce (4.289) with . An analogous argument gives (4.288).
Proof of part (c). Bound (4.290) follows trivially from Theorem 4.18 and the asymptotic behaviour as in Lemma 4.1.
Singularity at the Origin
By analogy to the previous section, we Taylor-expand the solution at the origin in order to prove a local existence theorem starting from the origin to the right. An immediate consistency condition follows from the presence of in (4.173): and is a free parameter. Denote the solution from the left by and and assume that locally around
| 4.293 |
where is a free parameter and . The following theorem asserts that the formal power series converge and hence are real analytic in a small neighbourhood of .
Theorem 4.24
Let be given. There exists an such that the formal power series (4.293) converge for all . In particular, and are real analytic on . We can differentiate the infinite sums term by term and the functions and solve (4.172) and (4.173) with the initial conditions , .
Proof
Around the origin we write out the formal expansion of B:
| 4.294 |
By the Faa di Bruno formula (4.186)–(4.188)
| 4.295 |
and . Plugging (4.293) into (4.172), we obtain the formal relation
| 4.296 |
Comparing the coefficients, we obtain
| 4.297 |
Similarly, plugging (4.293) into (4.173), we obtain
| 4.298 |
Comparing the coefficients, we obtain
| 4.299 |
Identities (4.297) and (4.299) give the recursive relationships
| 4.300 |
| 4.301 |
where
| 4.302 |
| 4.303 |
where and depend only on for . The rest of the proof is now entirely analogous to the proof of Theorem 4.18 and we omit the details.
Remark 4.25
We may repeat the same procedure as in Lemma 4.19 to deduce that and have the convergent power series near the origin and the function is . And the derivatives and satisfy the system of ODEs obtained by the differentiating (4.172) and (4.173) with initial conditions and .
The Friedmann Connection
Sonic Time, A Priori Bounds, and the Key Continuity Properties of the Flow
We denote by , where r is the analyticity radius given by Theorem 4.18.
Definition 5.1
(Sonic time) For any consider the unique local solution on the interval given by Theorem 4.18. The sonic time is given by
| 5.304 |
where we recall the definition (3.123) of B.
Lemma 5.2
Let be as above. Then
| 5.305 |
Proof
By (3.124), bound (5.305) is equivalent to showing
| 5.306 |
Since the right-hand side above is larger than , which converges to as . The left-hand side on the other hand converges to and thus the claim follows.
Lemma 5.3
For any consider the unique local solution on the interval given by Theorem 4.18. Then for any the following bounds hold:
| 5.307 |
| 5.308 |
| 5.309 |
where is defined in (3.124). Moreover, for any such that we have the upper bound
| 5.310 |
where is an -independent constant from Lemma 4.23.
Proof
Let and let . By Definition 5.1 there exists a such that for all , which according to (3.123) is equivalent to the bound
If then from the strict positivity of and the above bound we immediately have . If on the other hand then and therefore from the above bound again The two bounds together imply
| 5.311 |
which shows (5.308). The strict positivity of on follows by rewriting the equation (2.35) in the form
| 5.312 |
Finally, to prove (5.310), we observe that it suffices to show where we recall the formula . If , by Lemma 5.2, we are done. If , we consider two cases. First suppose on . Then on by Lemma 3.9 and (5.307), and by Lemma 4.23. Hence, by using Corollary 3.8, we have
If on , there should exist such that on and . Note that on and by Lemma 5.2. By using Corollary 3.8 again, we obtain
| 5.313 |
which proves the claim.
Lemma 5.4
Let , where is a small constant given by Theorem 4.18. For any consider the unique local RLP-type solution associated to given by Theorem 4.18. If for some , then
| 5.314 |
Proof
Since , by Lemma 5.3, we have . Using the definition of (3.124) it is easy to see that the inequality is equivalent to
This in turn implies
Now we note that
where we have used . This implies (5.314).
Remark 5.5
It is a priori possible that the solution blows-up at a point at which B remains strictly positive, for example through blow-up of W. It is trivial to see that this cannot happen in the Newtonian setting, but in the relativistic case it requires a careful argument, which is given in the next lemma.
Lemma 5.6
(No blow up before the sonic point) For any consider the unique RLP-type solution on the interval . If , then
| 5.315 |
Proof
Assume the opposite. In that case there exists a constant such that for all . Our goal is to show that on , which would lead to the contradiction.
Step 1. Boundedness of . If the bound (5.310) gives , which upon taking a square and using leads to
Since , this gives a uniform upper bound on on
| 5.316 |
Step 2. Boundedness of |W|. It follows from (2.35)–(2.36) that there exists a sufficiently large value such that , if and , if , where we use the already shown upper bound on . In both cases, the two regions are dynamically trapped and we denote the union of the two regions by . For any we multiply (2.35) by , (2.36) by , and sum them to obtain
| 5.317 |
with N sufficiently large. In particular, for any , where both belong to the invariant region above, we obtain
| 5.318 |
On the other hand, since , , and there exists a universal constant constant such that for a sufficiently large choice of N, rom (2.37) we have
| 5.319 |
We apply this to (5.318) to conclude that
This gives a lower bound for and therefore an upper bound for |W| via (5.319) in the region . In particular and the claim follows.
Essentially a consequence of the previous lemma and a standard ODE argument is the statement that as long as the sonic denominator B is bounded below by some constant for all , we can extend the solution to the left to some interval , where depends only on and . The statement and the proof are analogous to Lemma 4.3 in [15] and we state it without proof.
Lemma 5.7
Let be given and consider the unique RLP-type solution to the left of , given by Theorem 4.18. Assume that for some and we have and the conditions
| 5.320 |
hold. Then there exists a such that the solution can be continued to the interval so that
Proposition 5.8
Let be given and consider the unique RLP-type solution to the left of .
- (a)
- (Upper semi-continuity of the sonic time). Then
i.e. the map is upper semi-continuous. In particular, if then the map is continuous at . - (b)
- ([Continuity of the flow away from the sonic time]) Let and satisfy . Let . Then
- (c)
- Let and satisfy . Assume that there exist and such that for all and the following uniform bound holds:
Then there exists a such that5.321 5.322
The Friedmann Shooting Argument
The basic idea of this section is inspired by a related proof in our earlier work on the existence of Newtonian Larson-Penston solutions [15]. We start by recalling Definition 2.2.
Lemma 5.9
( and are nonempty) There exists an sufficiently small so that the following statements hold for any :
- (a)
There exists a such that .
- (b)
Moreover, .
Proof
Proof of part (a). We use the mean value theorem to write
for some . Note that . By (4.245), it follows that . By Theorem 4.18 there exist small enough and such that for all and . For such and x, we have
where we have used for , see Lemma 4.1. Note when . Therefore for all with , there exists an such that , which shows the claim. Here we have used (4.246) and the smallness of .
Proof of part (b). We rewrite (2.36) in the form
| 5.323 |
We now recall Lemma 3.6 and express the numerator above in the form
where we recall . Using (3.125),
Putting these together, and by (3.123) and , (5.323) reads as
| 5.324 |
where we have used and for . Hence the set
| 5.325 |
is an invariant set.
We now use Lemma 4.20 and the definition of to obtain for some . Together with the invariance of (5.325) we conclude that .
Remark 5.10
A corollary of Definition 2.2 and Lemma 5.9 is that the fundamental set X is a simply connected subset of which contains the point . The set X is in particular an interval.
Of fundamental importance in our analysis are the following two quantities.
Definition 5.11
(Critical point and Friedmann time) Let be a small constant given by Theorem 4.18. For any we introduce the critical point
| 5.326 |
and the Friedmann time
| 5.327 |
We will show later, the unique local RLP-type solution associated with the sonic point is in fact global and extends all the way to the origin . The Friedmann time introduced above plays a crucial role in the proof.
The sets and enjoy several important properties which we prove in the next lemma.
Lemma 5.12
Let be a small constant given by Theorem 4.18. Then for any the following statements hold.
- (a)
- (b)
For any we have . Moreover, the set is relatively open in .
Proof
Proof of Part (a). Let . Then from Lemma 4.6 we know that for all for some where r is given by Theorem 4.18. We first prove (5.328). By way of contradiction, assume that there exists such that
We distinguish three cases.
Case 1: . In this case, from (2.35) and (2.36), we have and . In particular, and locally strictly to the left of we have
We observe that these conditions are dynamically trapped and since , we deduce that W stays strictly bounded away from from above for all , which is a contradiction to the assumption .
Case 2: . In this case, necessarily and . On the other hand, since for , it follows on from (2.35). Hence, since . This is a contradiction.
Case 3: . In this case, necessarily. Since we know that locally around . Therefore, we have
for a sufficiently small . These conditions are dynamically trapped and we conclude that on . This is a contradiction, and hence completing the proof of (5.328).
Inequality (5.329) follows by a similar argument, since the property is dynamically preserved and all three conditions are easily checked to hold locally to the left of .
Proof of Part (b). For any by part (a) and (2.36) we have . Therefore there exists a sufficiently small so that for all . By Proposition 5.8, there exists a small neighborhood of such that for some . Therefore is open.
Lemma 5.13
Let be a small constant given by Theorem 4.18 and for any consider the unique local RLP-type solution given by Theorem 4.18. If then necessarily
| 5.330 |
In particular if , then necessarily .
Proof
Assume the claim is not true, in other words . Since is decreasing on by Lemma 5.12 and (2.35) and since it follows that . In particular, since on by (5.310), it follows from (3.123) that . Therefore
a contradiction to the assumption due to Lemma 5.6. The second claim is a consequence of the just proven claim and the definition of the set X.
Lemma 5.14
Let be a small constant given by Theorem 4.18 and for any consider the unique local RLP-type solution given by Theorem 4.18. Then there exists a monotonically increasing continuous function
such that for any
| 5.331 |
Proof
Since , by Lemma 5.12 on . Since we conclude from (3.123) that . Since for all , it follows from Lemma 5.12 that on the same interval. Therefore, by Lemma 3.9 we conclude that on . By Corollary 3.8 we then conclude
| 5.332 |
From (3.132) it is clear that on ,
Similarly, the first line of (3.131) is strictly positive on the same interval, and we conclude from (5.332) and (3.131) that
| 5.333 |
From (2.46), on , and we have on . Similarly,
for and some where we recall the upper bound M of in (5.316). Combining the two bounds and plugging it back into (5.333) we get
| 5.334 |
Together with the established lower bound we conclude the proof.
Proposition 5.15
The unique RLP-type solution associated with exists globally to the left, i.e.
Proof
Case 1. We assume . Since we are done.
Case 2. We assume . In this case which is impossible, since X is relatively open in by Lemma 5.12 and by Lemma 5.9.
Case 3. We now assume that . By Lemma 5.13 this in particular implies that
| 5.335 |
and
Consider now a sequence such that . We consider
and after possibly passing to a subsequence, we assume without loss that . We now consider two possibilities.
Case 3 a). Assume that . Since , by Lemma 5.13 necessarily , . Upon possibly passing to a further subsequence, we can ascertain that there exists some such that for all . By Lemma 5.14 we conclude in particular that
| 5.336 |
Therefore, by part (c) of Proposition 5.8, there exists such that
| 5.337 |
Fix an and observe that
| 5.338 |
where we have used Lemma 5.12. This implies , a contradiction to (5.335).
Case 3 b). Assume that . For any fixed we can apply the argument from Case 3 a) to conclude that . Therefore in this case.
Lemma 5.16
(Continuity of ) The map
is continuous and
| 5.339 |
Proof
The proof is nearly identical to the proof of Lemma 4.13 in [15].
The Solution from the Origin to the Right
In this section we consider the solutions to (2.35)–(2.36) generated by the data imposed at and satisfying . Upon specifying the value , the problem is well-posed by Theorem 4.24 on some interval [0, r].
Definition 5.17
We introduce the sonic time from the left
| 5.340 |
Lemma 5.18
Let , and . The solution to (2.35)–(2.36) with the initial data
| 5.341 |
exists on the interval and satisfies the following bounds: for
| 5.342 |
| 5.343 |
| 5.344 |
| 5.345 |
| 5.346 |
Proof
The proof is analogous to the proof of Lemma 4.14 from [15].
In the following lemma we identify a spatial scale over which we obtain quantitative lower bounds on the density over .
Lemma 5.19
(Quantitative lower bounds on ) Let and be given and consider the unique solution to the initial-value problem (2.35)–(2.36), (5.341). For any let
| 5.347 |
Then for all and
| 5.348 |
Moreover, for all sufficiently small , there exists a such that for all we have
| 5.349 |
Proof
Equation (2.35) is equivalent to
| 5.350 |
Since and , by Lemma 5.18, we have the following bounds on the interval
| 5.351 |
| 5.352 |
| 5.353 |
Now from the definition (2.37) of B, for any using (5.351)-(5.353) and the definition of in (5.347), we have
| 5.354 |
Note from the second line to the third line we have used the upper bound of term
| 5.355 |
which holds true for and sufficiently small . Therefore, for all .
From (5.351), (5.353), and (5.354) for any we obtain
Now comparing the denominator and numerator of the last fractions, we see that
and
and hence we deduce that for any
Plugging this bound in (5.350) we obtain (5.348).
To show (5.349), we first rewrite (5.347) for as
| 5.356 |
Using this in (5.348)
| 5.357 |
The bound (5.349) follows if which is clearly true for sufficiently large and sufficiently small .
Remark 5.20
The specific choice of in (5.347) has been made to ensure the lower bound in (5.349) to be compared with the bound (5.314) satisfied by the solutions emanating from the sonic point. In fact, better bounds are obtained by choosing different . For instance, if for in (5.347), then we may deduce that for such , with the equality being valid for for all sufficiently large and small .
Remark 5.21
Since the mapping from (5.347) is nonincreasing, it follows that for any fixed we have the uniform bound on the sonic time:
The following lemma shows the crucial monotonicity property of with respect to on a time-scale of order .
Lemma 5.22
Let . There exists a sufficiently small such that for all
Proof
We introduce the short-hand notation and , where we note that the map is by Remark 4.25. It is then easy to check that solve
| 5.358 |
| 5.359 |
where
At we have the initial values
| 5.360 |
We multiply (5.358) by and integrate over the region [0, x]. By (5.360) we obtain
| 5.361 |
Just like in (5.354), by using (5.351)–(5.353), and (5.355) we have
Therefore
| 5.362 |
where we have used for all and sufficiently small .
Using the bounds , (5.351)–(5.353), (5.362), we obtain from (5.361)
| 5.363 |
for all sufficiently small . Here we have used and , and
for any so that is bounded by a constant.
Let where with a sufficiently small to be specified later. Note that for all and chosen sufficiently small and independent of . For any we have . Therefore . From these estimates and (5.363) we conclude for ,
| 5.364 |
Since , with chosen sufficiently small, but independent of , we can absorb the first two integrals on the right-most side into the term on the left-hand side. We then conclude
| 5.365 |
We now integrate (5.359), use (5.351)–(5.353), (5.362), and conclude from (5.360)
| 5.366 |
for all sufficiently small , where we have used (5.365) and . Therefore,
and thus, for sufficiently small so that , we have . From here we infer
Upper and Lower Solutions
Definition 5.23
(Upper and lower solution) For any we say that is an upper (resp. lower) solution at if there exists such that
and
Lemma 5.24
(Existence of a lower solution) There exists a such that for any there exists an such that is a lower solution at . Moreover, there exists a universal constant C such that , where .
Proof
For any we consider the function
| 5.367 |
The function is clearly increasing, continuous, and by Lemma 5.16, . Therefore, the range of S is of the form for some . For any , by Lemma 5.16, the supremum in (5.367) is attained, i.e. there exists such that . Therefore, for any we have
By Lemma 5.12 we have the bound . By Lemma 5.19 choosing and using Lemmas 5.4 and 5.3 we have
where we have assumed to be sufficiently small. On the other hand (where we recall that is the Friedmann solution, see (2.40)). Using Remark 5.21 and the Intermediate Value Theorem, there exists a such that
By (5.342) and therefore is a lower solution at . The upper bound on follows from our choice of above.
Remark 5.25
The proof of Lemma 5.24 follows closely the analogous proof in the Newtonian case (Lemma 4.20 in [15]).
Lemma 5.26
Let (see (2.44) for the definition of ) and assume that . Then
Proof
Proof of Part (a). If not let
At we have from (2.35)–(2.36) since for , and . Therefore there exists a neighbourhood strictly to the left of such that , , and . It is easily checked that this property is dynamically trapped and we conclude
| 5.368 |
Integrating the above equation over we conclude
| 5.369 |
We now recall (5.317). From (5.369), this implies that since . In particular we obtain the lower bound
It follows that
| 5.370 |
On the other hand, bound (5.369) implies
| 5.371 |
From (2.37), (5.370)–(5.371) we therefore have
| 5.372 |
for some universal constant . Since W grows to infinity as , this implies that the right-hand side above necessarily becomes negative, i.e. . A contradiction.
Proof of Part (b). Since by part (a) and (since ), from Lemmas 5.3 and 5.4
| 5.373 |
By way of contradiction we assume that . For any choose so small that
| 5.374 |
Note that in particular, for any we have
| 5.375 |
where we have used (5.373) and (5.374). Similarly,
| 5.376 |
We next claim that there exists a universal constant such that
| 5.377 |
Keeping in mind (2.37), this is equivalent to the estimate
| 5.378 |
For any the first term on the left-hand side of (5.378) is strictly negative, and so are and . On the other hand
| 5.379 |
where we have used (5.375) and (5.376). Similarly,
| 5.380 |
where we have used (5.373). It is thus clear that we can choose of the form for some universal constant and sufficiently small, so that (5.377) is true. It then follows from (2.36) that
| 5.381 |
As a consequence of (5.381), for sufficiently small and we have
which in turn implies for some and sufficiently small x, a contradiction.
Lemma 5.27
(Existence of an upper solution) If
then there exists a universal constant and an arbitrarily small such that is an upper solution at and , where .
Proof
It is clear that as otherwise we would have , a contradiction to the definition (5.326) of and the openness of X. We distinguish three cases.
Case 1.
In this case and by Proposition 5.15 we have . By part (b) of Lemma 5.26 there exists a constant and a sequence such that and
| 5.382 |
where C is independent of n. For any such we have by part (a) of Lemma 5.26 and Lemma 5.4
| 5.383 |
where we have used the assumption and part (a) of Lemma 5.26 to conclude , which is necessary for the application of Lemma 5.4.
For any sufficiently small consider with for n large enough. By Lemmas 5.19 and 5.26
On the other hand,
where we recall that is the Friedmann solution. Moreover, by Remark 5.21 for all . By the continuity of the map the Intermediate Value Theorem implies that there exists such that
| 5.384 |
Let
Clearly for all . By Lemma 5.19. Using (5.344)–(5.345) we also have . Together with (5.383) and (5.384) we conclude that for all n sufficiently large
| 5.385 |
By (5.383) grows to positive infinity as approaches zero. Therefore, we may choose a sufficiently large and set , , so that the right-hand side of (5.385) is bounded from above by . This gives
We conclude that is an upper solution (see Definition 5.23) at and the upper bound on follows from our choice of .
Case 2.
| 5.386 |
In particular (see (2.46)) and by Lemma 5.12. Assumption (5.386) also implies that there exists a constant independent of x such that
| 5.387 |
We now claim that there exists a constant C such that
| 5.388 |
for all sufficiently small x. To prove (5.388) we note that by (2.35) this is equivalent to the bound which, by (2.37) is equivalent to the bound
| 5.389 |
Using (5.387) and Lemma 5.4, we have
Choosing sufficiently small, x so small that , and sufficiently large, but independent of , we use the above bounds to conclude the claim.
Bound (5.388) gives , which in turn gives the bound
| 5.390 |
for some sufficiently small. This immediately implies the uniform boundedness of , i.e.
| 5.391 |
where we have (possibly) enlarged c so that (5.387) and (5.391) are both true. There exists an and a sequence such that and
Since is bounded, by Lemma 5.19 we can choose an such that for all . On the other hand . By the intermediate value theorem there exists a sequence such that
Since and (Lemma 5.18) we conclude from (2.35)–(2.36) and Theorem 4.24 that and are bounded uniformly-in-n, by some constant . Therefore
We thus conclude that for a fixed n sufficiently large . Therefore, is an upper solution (see Definition 5.23) at with . The claimed upper bound on is clear.
Case 3.
As must oscillate between and we can use the mean value theorem to conclude that there exists a sequence such that and
| 5.392 |
We claim that there exist and such that
| 5.393 |
To prove this, assume that (5.393) is not true. Then there exists a subsequence of such that . We now rewrite (2.36) in the form
| 5.394 |
where is a control parameter to be chosen below. We use (2.37) to evaluate
| 5.395 |
Since , by Lemma 5.4 we also have the bound . We may therefore estimate
| 5.396 |
By (5.392), for any we have for all sufficiently large n. We use the upper bounds on along the sequence to obtain
and therefore
| 5.397 |
for some and all sufficiently small . Feeding this back into (5.394), we conclude
| 5.398 |
for all sufficiently large n, where we use the first bound in (5.392), which contradicts the second claim in (5.392). We can therefore repeat the same argument following (5.382) to conclude that is an upper solution at , for some n sufficiently large. The upper bound on follows in the same way.
We next show that takes on value at .
Proposition 5.28
The limit exists and
Proof
Assume that the claim is not true. By Lemmas 5.24 and 5.27 we can find a and so that and are respectively a lower and an upper solution at . Without loss of generality let
By Lemmas 5.24 and 5.27 there exist such that , , and , where and . Therefore by Lemma 5.22, for all , since for large and all with sufficiently small. By the inverse function theorem, there exists a continuous function such that
By strict monotonicity of on the inverse g is in fact injective and therefore . We consider the map
By the above discussion h is continuous, and . Therefore, by the Intermediate Value Theorem there exists an such that . The solution exists on , satisfies and belongs to X. This is a contradiction to the definition of X.
In the next proposition we will prove that the solution is analytic in a left neighbourhood of , by showing that it coincides with a solution emanating from the origin.
Proposition 5.29
There exists a constant so that
The solution extends continuously to and . Moreover, the solution coincides with and it is therefore analytic at by Theorem 4.24.
Proof
By Proposition 5.28 it is clear that is bounded on . Moreover, on and therefore by Lemma 5.4. We may now apply the exact same argument as in the proof of (5.391) to conclude that is uniformly bounded on . Since and on , by (2.35) and therefore the limit exists and it is finite. It is also clear that there exists a constant such that
| 5.399 |
Let
It is then easy to check from (2.36)
and therefore, by (5.399) and the uniform boundedness of W and , for any we obtain
We now let and conclude
| 5.400 |
Consider now and , both are defined in a (right) neighbourhood of and satisfy
where . Here we have used the already proven boundedness of and the boundedness of , see Lemma 5.18. We multiply the first equation by , the second by , integrate over [0, x] and use Cauchy-Schwarz to get
| 5.401 |
We note that is well-defined, since , where ; we use (5.400) and observe in the vicinity of by the analyticity of , see Theorem 4.24. Therefore by (5.401). The analyticity claim now follows from Theorem 4.24.
Remark 5.30
Propositions 5.28 and 5.29 follow closely the arguments in the Newtonian case (Propositions 4.22 and 4.23 in [15]). However, an important difference is the use of (5.391) in the proof of Proposition 5.29.
Proof of Theorem 2.3. Theorem 2.3 is now a simple corollary of Propositions 5.15, 5.28, and 5.29.
The Far Field Connection
The goal of this section is to construct a global-to-the-right solution of the dynamical system (2.35)–(2.36) for all in the sonic window . We refer to Section 2.4 for a detailed overview.
A Priori Bounds
Remark 6.1
The condition is equivalent to the inequality
| 6.402 |
which can be seen directly from the definition (3.124) of . Similarly, the inequality is equivalent to
| 6.403 |
Lemma 6.2
(A priori bounds to the right) Let . Let be the maximal time of existence to the right of the associated RLP-type solution on which we have
| 6.404 |
| 6.405 |
where is an -independent constant from Lemma 4.23. Then the following claims hold
- (a)
6.406 6.407
where6.408 - (b)
- There exists a constant independent of X and such that for all
6.409 - (c)
- There exist constants , such that for all
and therefore6.410
In particular, with sufficiently small, we may choose uniform for all .6.411
Proof
We note that by Lemma 4.23 there exists a such that .
Proof of part (a). Notice that by assumptions (6.404)–(6.405) we have
| 6.412 |
Bound (6.406) follows from (2.35), (3.123), (6.404), and (6.412).
By (2.36) and (6.404)–(6.405) we conclude or equivalently . We conclude that for any we have
| 6.413 |
since , for sufficiently small and independent of . Here we have also used Remark 4.2 and the definition of in (4.245).
| 6.414 |
We may let and conclude from (6.404), (6.412) that on . In particular
| 6.415 |
which is (6.408).
Proof of part (b). Let now and rewrite (2.36) in the following way:
| 6.416 |
We use (2.37) to evaluate
| 6.417 |
By (6.408) we know that for any , and therefore
| 6.418 |
Fix now any , which is possible since can be chosen small. The expression in (6.417) can be bounded from below with the help of (6.418) by
| 6.419 |
where
By the already proven bound (6.406) it follows that . Therefore, from the above formulas, there exists a universal constant C such that
Since and for sufficiently small we have (recall (2.38)), it follows that there exists a constant independent of X and such that
| 6.420 |
Let now . It then follows that both summands on the right-hand side of (6.416) are strictly negative when ; the first term is negative due to and the second one due to (6.420) and the negativity of B. Therefore the region is dynamically inaccessible. This completes the proof of (6.409).
Proof of part (c). For any it follows from (2.35) that
| 6.421 |
We focus on the numerator of the right-hand side above. By (2.37) we have
| 6.422 |
In the third line above we crucially used the bound (6.402), which by Remark 6.1 is equivalent to the assumption (6.405). Since , , and on , we may choose with C sufficiently large, but -independent, so that the above expression is strictly positive, since in this case . Therefore, for sufficiently small and , the right-hand side of (6.421) is negative, since on . This proves (6.410), which after an integration gives (6.411).
Monotonicity and Global Existence
Lemma 6.3
(Monotonicity properties of the flow) Let . Let be the maximal time of existence to the right of the associated RLP-type solution on which we have
| 6.423 |
Then there exists an such that for all the associated RLP-type solution satisfies,
| 6.424 |
If in addition , then there exists a constant such that for all .
Proof
We observe that is strictly positive on by our assumption. Moreover, from the definition of (3.134), it is clear that , where
| 6.425 |
It is clear that for any and sufficiently small the expression is strictly positive for all . If there exists an such that , then by the monotonicity of , for all . Thus and therefore remain positive. It follows that if , then by Corollary 3.8 for all .
We next show that for a sufficiently small the value of always drops below at some for all so that f remains strictly positive on . By the bound (6.411) and it follows that as long as . Since and , then with
| 6.426 |
it follows that if and on , then for all , with chosen sufficiently small.
It remains to show that for all with chosen sufficiently small, we indeed have on . Let be the maximal subinterval of , such that on . By Lemma 4.23 we have . Notice that on the interval , by the strict negativity of B the factor (3.131) is strictly negative. Since is positive and we have from Lemma 3.7
For any this immediately yields
| 6.427 |
Observe that
| 6.428 |
where we have used , , and finally . Therefore
| 6.429 |
for some universal constant C, which follows from (6.428) and the a priori bound .
We note that by (2.46) and (3.125),
| 6.430 |
where we have used , , and . Similarly,
| 6.431 |
where we have used in the first line, and in the second, and finally , , and in the last line. Also, since and , we have the following simple bound
| 6.432 |
Since , we can use (6.430), (6.431), (6.428), (6.432), and the definition (3.132) of to conclude that
| 6.433 |
We now feed the bounds (6.429) and (6.433) into (6.427) to conclude
| 6.434 |
Let so that by Lemma 4.23 for some and all and all . From (6.434) we conclude that we can choose so that for all , where we recall . By the definition of , this concludes the proof of (6.424).
To prove the remaining claim, by (6.434) we need only to address the case when . In this case is strictly positive for by the argument following (6.425) and therefore by (6.427) and (6.433)
| 6.435 |
and thus the claim follows.
We are now ready to prove Theorem 2.4, which asserts global-to-the-right existence of RLP-type solutions.
Proof of Theorem 2.4. Let be the maximal time of existence on which
| 6.436 |
By Lemma 6.3 we conclude that on for all sufficiently small and therefore all the conclusions of Lemma 6.2 apply. We argue by contradiction and assume that . By Lemma 6.3 we know that there exists a constant such that for all . In particular . It follows that
| 6.437 |
By (2.36) and (3.127), we have
| 6.438 |
By the uniform bounds (6.407) and (6.409) we have . By (6.406) and (6.408) we have
| 6.439 |
Therefore the first line of the right-most side of (6.438) is bounded. Since it follows that and therefore by (2.35). On the other hand, the second line of the right-most side of (6.438) is of the form , where
| 6.440 |
We now use (6.403), which for any allows us to estimate the numerator of (6.440) from above:
| 6.441 |
As , approaches W and therefore the above expression is negative for sufficiently small (and independent of X). Therefore by (6.440) as , which implies that the right-most side of (6.438) blows up to as , which is a contradiction to (6.437). This concludes the proof of the theorem.
Asymptotic Behaviour as
We introduce the unknown , where is the energy density introduced in (2.19). Recalling (2.34) and (2.26), we have
| 6.442 |
It is straightforward to check that the system (2.35)–(2.36) can be reformulated as follows
| 6.443 |
| 6.444 |
Lemma 6.4
There exist an , a constant C and sufficiently small so that for all
| 6.445 |
where
| 6.446 |
| 6.447 |
Proof
From (6.443) and the definition (3.123) of B it follows that
| 6.448 |
We rewrite the rectangular brackets in the numerator above in the form
| 6.449 |
We feed this back into (6.448), divide the numerator and the denominator by , and obtain
| 6.450 |
where
| 6.451 |
| 6.452 |
By (6.408) and , it follows that for some universal constant . Together with (6.411) we conclude
| 6.453 |
where for some . We conclude that . Since by Lemma 6.2, for sufficiently small we conclude that there exist a constant C and such that for all
This immediately yields (6.446). Note that the leading order behaviour in the rectangular brackets in the very last line of (6.422) is of the form . We use the decay bound (6.411), namely , and we see that the right-most side of (6.422) becomes positive with , with x sufficiently large and sufficiently small. The identity (6.421) yields (6.447).
Lemma 6.5
Let and let be the unique RLP-type solution defined globally to the right for all . Then for any there exists a constant such that
| 6.454 |
| 6.455 |
Claim (6.455) equivalently reads
| 6.456 |
Proof
Note that by (6.444)
| 6.457 |
From this and the first line of (6.448) we conclude
| 6.458 |
Let now
| 6.459 |
Equation (6.458) and Lemma 6.4 now give
| 6.460 |
We now use the integrating factor to solve for . For any we have
| 6.461 |
By Lemma 6.4 and the bound from Lemma 6.2 we have and therefore
| 6.462 |
We use this bound in (6.461) and together with (6.447) we conclude that
| 6.463 |
We now recall the definition (6.459) of and conclude from the above bound that
| 6.464 |
where we recall (6.410). The claim (6.454) follows.
From Lemma 6.4 we conclude
| 6.465 |
and thus
| 6.466 |
We now use (6.464) and Lemma 6.4 to conclude that and is therefore integrable. Letting we conclude (6.455). That (6.456) is equivalent to (6.455) follows from (6.442).
Remark 6.6
Stronger versions of the claims (6.454) and (6.455) are contained in (6.464) and (6.466) respectively. Formula (6.466) can be used to give a quantitative decay bound for
In the following lemma we establish the strict upper bound for the RLP-type solutions and provide the crucial -independent bounds at spacelike hypersurface , which will play an important role in the construction of the maximal selfsimilar extension of the RLP spacetime.
Lemma 6.7
(W stays below 1) Let and let be the unique RLP-type solution defined globally to the right for all . Then there exist a sufficiently small and constants such that
| 6.467 |
and
| 6.468 |
where .
Proof
We first observe that by (6.443)–(6.444)
| 6.469 |
where we have used (6.459) in the second equality. By way of contradiction, assume that there exists an such that and for all . Integrating (6.469) over we conclude that
| 6.470 |
where we recall (6.442). On the other hand, clearly and therefore, by (6.444), at we have
| 6.471 |
Since the denominator is strictly negative, it follows that
| 6.472 |
Combining (6.470) and (6.472) we conclude that
| 6.473 |
Our goal is to provide a lower bound for which is uniform-in-. Using (6.461),(6.462), and (6.447), we conclude that for any
| 6.474 |
Therefore
| 6.475 |
Now choose with as in Lemma 4.23 so that, by Lemma 4.23 we can ascertain the uniform-in- bound
| 6.476 |
This bound together with the lower bound (6.475) yields
| 6.477 |
The right-hand side of (6.477) is a continuous function in x which converges to as . Therefore, there exists an -independent real number such that
| 6.478 |
Observe that the bound (6.478) also ascertains that , see (6.459).
It is easily checked from (6.443)–(6.444) that . Since by Lemma 6.2 it then follows that
| 6.479 |
where, as usual, the constant C is independent of .
We now use the bounds (6.478) and (6.479) in (6.473) to conclude
| 6.480 |
Observe that we have used the non-negativity of on in the second bound above.
By the -asymptotic behaviour of from Lemma 4.1 we have
and clearly . Since however the term is bounded from below by some -independent positive real number , we obtain contradiction by choosing sufficiently small. This completes the proof of (6.467).
By Lemma 6.5 we may integrate (6.469) over the whole interval to conclude
| 6.481 |
for sufficiently small. This proves the lower bound stated in (6.468).
To prove the upper bound on , we rewrite (6.469) in the form and integrate to obtain the identity
| 6.482 |
Using (6.464) and (6.407) we conclude from (6.482) that
| 6.483 |
where the constant C does not depend on . We let , so that for sufficiently small the -dependent quantity is bounded uniformly-in-. On the other hand
which, since , is also bounded uniformly-in-. This completes the proof of the lemma.
In the following proposition, we establish the sharp asymptotic behaviour of the variable W as - this will play an important role in constructing the unique extension of the solution in Section 7.
Proposition 6.8
(Precise asymptotic behaviour for W) Let and let be the unique RLP-type solution defined globally to the right for all . After choosing a possibly smaller , there exists a constant such that for any there exists a constant such that
| 6.484 |
where for all .
Proof
We may now derive more precise asymptotics for the functions and from (6.451)–(6.452). Using (6.456) and (6.454) we see that
| 6.485 |
where for all by Lemma 6.7. We conclude that there exists a constant such that for all ,
| 6.486 |
Using (6.454) and (6.456), it is easy to see that
| 6.487 |
Recall now from (6.459). Letting , we may rewrite (6.460) in the form
| 6.488 |
with . This yields the identity
| 6.489 |
By the bound (6.464) and by (6.486)–(6.487), it follows that the right-hand side of of the above identity is integrable on and therefore (6.484) holds for some (note that cannot be positive by Lemma 6.7). To prove the -uniform upper bound on , we must first estimate the rate of decay of as . From (6.488) and (6.451), we directly check
| 6.490 |
Therefore, for sufficiently large we have the upper bound
| 6.491 |
for some independent of . Here we have used (6.464), the bound (6.456), and Lemma 6.5. Keeping in mind (6.459), the bound (from Lemma 6.7) and (6.486) we conclude that for any sufficiently large we have
| 6.492 |
for some constants and independent of . Note that we have used in the third line and (6.491) in the last. This implies the claim for sufficiently small.
Maximal Analytic Extension
The main results of this section are the description of the local and the global extension of the flow across the coordinate singularity at , see Theorems 7.4 and 2.5 respectively. For a detailed overview, we refer to Section 2.5.
Adapted Comoving Coordinates
As explained in Section 2.5 the metric g given by (2.7) becomes singular as . To show that this is merely a coordinate singularity, we introduced the adapted comoving chart (2.54), and the new selfsimilar variable Y given by (2.55)–(2.56). A simple manipulation of (2.54) gives the relation
| 7.493 |
Recall the new unknowns , , and w(Y) from (2.57). In the new chart the spacetime metric (2.7) by (2.19)–(2.24), (7.493), and (2.57) takes the form
where we recall (2.68)–(2.69). Note that by (2.52) and (2.68), we have
| 7.494 |
It is clear that in the limit , i.e. the metric coefficient approaches a positive constant due to (2.53) and (2.56).
Lemma 7.1
Let the triple be a smooth solution to (3.117)–(3.118). Then the new unknowns defined in (2.57) solve the system (2.58)–(2.61).
Proof
The Lagrangian system (3.117)–(3.118) now takes the form
| 7.495 |
| 7.496 |
| 7.497 |
where
| 7.498 |
and refers to differentiation with respect to y. Using (2.57) it is then straightforward to check that (2.58)–(2.61) hold.
Remark 7.2
From (7.497) and the leading order behaviour of at it is easy to see that
| 7.499 |
| 7.500 |
for some constant . Here the constant a corresponds to the labelling gauge freedom and we set without loss of generality
| 7.501 |
We note that the unknown corresponds to the modified density defined in (2.57). By Lemma 6.5 and Proposition 6.8, and the asymptotic behaviour (7.499) with , we have the leading order asymptotic behaviour
| 7.502 |
| 7.503 |
where and
| 7.504 |
by Lemma 6.7 and Proposition 6.8. We note that
| 7.505 |
by Lemma 6.7.
Local Extension
To prove the existence of a solution to (2.58)–(2.60) with suitable boundary conditions (see (7.528)–(7.530)), we formally Taylor-expand the unknowns around and prove the convergence of the series. Assume that the following expansions hold
| 7.506 |
| 7.507 |
| 7.508 |
where by (7.501) . From this and (2.61) we have the formal expansion
| 7.509 |
where for any
| 7.510 |
Here we employ the convention that if . We may single out the leading order contribution on the right-hand side of (7.510):
| 7.511 |
where
| 7.512 |
Lemma 7.3
For any , , the Taylor coefficients satisfy the following recursive relations
| 7.513 |
| 7.514 |
| 7.515 |
where
| 7.516 |
| 7.517 |
Proof
Proof of (7.513). We multiply (2.58) by and plug in the formal expansions (7.506)–(7.510). We formally obtain that the N-th Taylor coefficient in the expansion of is given by
| 7.518 |
On the other hand, the N-th Taylor coefficient in the expansion of is easily checked to be
| 7.519 |
We now extract the leading order terms in (7.518) and (7.519) - these are the factors containing either or . We see that
| 7.520 |
where we have used . Note that the term does not contribute a copy of on the right-hand side above since when . Similarly, the expression (7.519) can be split into
| 7.521 |
Note that we have repeatedly used the assumption . Equating (7.520) and (7.521) we obtain the recursive relation (7.513).
Proof of (7.514). We multiply (2.59) by and expand the two sides of the equation by analogy to the above. We obtain formally
| 7.522 |
Upon extracting the leading order term in the N-th Taylor coefficient on the right-hand side of (7.522), by analogy to (7.520) we obtain
| 7.523 |
We now turn our attention to the right-hand side. Observe that formally the N-th Taylor coefficient in the expansion of equals
| 7.524 |
To single out the leading order contribution we use (7.511) and thus (7.524) can be rewritten in the form
| 7.525 |
By analogy to (7.519) and (7.521) we also check that the N-the Taylor coefficient in the expansion of formally corresponds to
| 7.526 |
After isolating the leading order coefficients, the above expression can be rewritten in the form
| 7.527 |
Claim (7.514) now follows from (7.523) (7.525), and (7.527).
Proof of (7.515). The claim follows by substituting the formal expansions for and into (2.60), comparing the coefficients and using .
Theorem 7.4
(Local extension) There exists and and a such that for any there exists a unique analytic-in-Y solution to (2.58)–(2.60) on the interval such that
| 7.528 |
| 7.529 |
| 7.530 |
| 7.531 |
where are constants given by Lemma 6.7 and Proposition 6.8. Moreover,
- (a)
- There exists a such that
7.532 - (b)
- There exists a constant such that
7.533 - (c)
- There exists a constant such that
7.534 - (d)
- There exists a constant such that
7.535
Proof
The proof of existence of a local real-analytic solution is analogous to the proof of Theorem 4.18. We observe that the occurrence of the factors and in (7.513) and (7.514) respectively reflects the fact that and must be prescribed in order to consistently solve the ensuing recursive relations between the higher-order coefficients. We leave out the details, as they are similar to the ideas of the proof of Theorem 4.18.
Proof of part (a). Estimates (7.532) are a trivial consequence of the leading order Taylor expansions from Remark 7.2 the uniform-in- positivity of and negativity of .
Proof of part (b). Since there exists a constant such that for all , by Taylor expansion around we can ascertain that there is a constant and an interval , , such that (7.533) holds.
Proof of part (c). Observe that . Since is locally bounded from below and locally increases to the left, the bound follows from continuity.
Proof of part (d). By the Taylor expansion (7.507) around and the uniform-in- bound (7.504) we can guarantee that on and that can be chosen independently of .
Remark 7.5
Note that is -independent, which plays an important role in our proof of the existence of outgoing null-geodesics from the scaling origin . The constants and act as initial conditions for the system (2.58)–(2.60) to extend the solution to the left.
It is a priori possible that the solution constructed by Theorem 7.4 does not coincide with the RLP solution constructed for . The overlapping region expressed in the x-coordinate is given by , where . As it is less clear how to apply the standard uniqueness theorem for the problem phrased in the Y-coordinate, we shall revert to the coordinate
| 7.536 |
and reduce the question of uniqueness to the standard ODE theory.
Proposition 7.6
(Uniqueness of the RLP-extension) In the region , the solution constructed in Theorem 7.4 coincides with the RLP-type solution emanating from the sonic point constructed in Section 6.
Proof
Introduce the unknowns
| 7.537 |
A direct calculation gives
| 7.538 |
| 7.539 |
Using (7.536) and (2.35)–(2.36), we may further compute
| 7.540 |
where it is easy to check that the function is Lipschitz. An analogous calculation based on (2.36) then gives
| 7.541 |
where it is easy to check that the function is Lipschitz. Recalling (7.537), we conclude that
| 7.542 |
Therefore, the dynamical system (7.542) is regular at and must coincide with the RLP-solution emanating from the sonic point . Since the mapping is smooth and invertible locally around , the claimed uniqueness statement follows.
Maximal Extension
By analogy to Lemma 3.6, we factorise the denominator into
| 7.543 |
where
| 7.544 |
| 7.545 |
Clearly, for any fixed Y and , is the solution of the equation viewed as a quadratic equation in . Just like in the proof of Lemma 3.6, it can be checked that
| 7.546 |
Our next goal is to prove a global extension result, which is shown later in Theorem 2.5. To that end define
| 7.547 |
Lemma 7.7
Let be a local-in-Y solution to (2.58)–(2.60).
- (a)
- Then for all the following identities hold:
7.548 7.549 - (b)
- For all we have the bounds
7.550
Proof
Proof of part (a). Dividing (2.58) by and (2.59) by and the summing the -multiple of the first equation with the second, we obtain (7.548). Using (7.548) and (2.60) we then obtain
Proof of part (b). The strict positivity of in a small open left neighbourhood of follows from Theorem 7.4. The global positivity then follows by integrating (2.58), which can be rewritten as
The upper bound clearly holds at and in its small neighbourhood due to (7.502)–(7.503). Assume now by contradiction that there exists so that is the infimum over all values of such that . By continuity obviously . However, by (2.58)–(2.59) , since by (7.547). This is a contradiction, as this means that decays locally going to the left of .
Lemma 7.8
Let be a local-in-Y solution to (2.58)–(2.60) and let
| 7.551 |
Then there exist a and sufficiently small such that for all we have
| 7.552 |
Proof
We observe that by (7.549),
| 7.553 |
Since by our assumptions, it follows that
Since it follows from Theorem 7.4, inequality (7.533) that we can choose such that on . Using the standard integrating factor argument it then follows from (7.553) that
| 7.554 |
Lemma 7.9
Let be a local-in-Y solution to (2.58)–(2.60) with the radius of analyticity given by Theorem 7.4. Then there exists a constant such that
| 7.555 |
Proof
| 7.556 |
where we used . We now rewrite to obtain
| 7.557 |
where we have used , which in turn gives the bounds , , . Recall that by (7.528)–(7.529). From (7.556) and (7.557) it then follows that
| 7.558 |
Therefore by Theorem 7.4, inequality (7.534) and (7.558), the ratio increases to the left of as long as . If the ratio ever exceeds going to the left then it must stay larger than as seen by a contradiction argument using (7.557). Therefore the claim follows.
The next lemma establishes the monotonicity of the function , and as a consequence the strict lower bound on for some . The former is a preparatory step to prove that the flow remains supersonic in Lemma 7.11.
Lemma 7.10
Let be a local-in-Y solution to (2.58)–(2.60) analytic in given by Theorem 7.4. Then there exists an sufficiently small so that
| 7.559 |
Moreover, there exists a constant such that
| 7.560 |
In particular, .
Proof
| 7.561 |
From (2.61) we have
| 7.562 |
By Lemma 7.8 there exists a such that . Therefore
| 7.563 |
for sufficiently small. Therefore
| 7.564 |
where we have used the bounds and , where the latter follows from the assumption on . Plugging (7.564) into (7.561) we obtain the estimate
| 7.565 |
for sufficiently small. Here we have crucially used Lemma 7.9.
To prove (7.560) we note that by (7.565)
| 7.566 |
and therefore
| 7.567 |
where we have used part (d) of Theorem 7.4 in the last inequality. We have also used the bound for which follows from on , which in turn follows from the bound and (2.60).
Lemma 7.11
Let be a local-in-Y solution to (2.58)–(2.60) with the radius of analyticity given by Theorem 7.4. Then
in other words - the flow remains supersonic.
Proof
Using (7.546) and (7.559), and the bounds
we get
| 7.568 |
Since , it follows that
Therefore
| 7.569 |
From (2.60) and the bound we have the rough bound . Therefore
| 7.570 |
Using (7.569)–(7.570) in (7.568) we obtain
| 7.571 |
Assume now that . In that case and it is clear from (7.571) that is strictly positive in some right neighbourhood of . Here we use the uniform positivity of on , which follows from Lemma 7.10. A contradiction.
We have shown that the flow remains supersonic to the left of and therefore the only obstruction to the global existence of the solution is the finite-time blow-up of the unknowns. We shall show that this is precisely the case. The intuition is that right-hand side of (2.59) will be, in a suitable sense, dominated by the first term on the right-hand side, which will lead to the blow-up of through a Riccati-type argument.
Proof of Theorem 2.5. Let be a positive constant to be specified later. We rewrite (2.59) in the form
| 7.572 |
We focus on the term
By (2.61) we have
| 7.573 |
We let
| 7.574 |
where is a constant to be specified later. After regrouping terms in E above we obtain
| 7.575 |
where we have used Lemma 7.8 in the last inequality. It is now clear that with the choice
| 7.576 |
there exists an sufficiently small, so that both expressions on the right-most side of (7.575) are strictly negative for all . Here we use .
We conclude therefore from (7.572) and (7.574) that
| 7.577 |
Now choose sufficiently small (but independent of ) so that for all , which is possible due to (7.560). Let now
We conclude from (7.577) that
| 7.578 |
for some universal constant . Inequality (7.578) is a Riccati-type differential inequality and leads to finite Y blow-up of . We provide here the standard argument for the sake of completeness. Upon multiplying by K and then redefining , we may assume without loss of generality that . Divide (7.578) (with ) by and express both sides as an exact derivative to conclude
| 7.579 |
Upon integration this yields the bound
| 7.580 |
and therefore necessarily blows up as for some . By Lemma 7.9 this also implies that d blows up as .
We next want to show that and therefore . We note that for any we necessarily have , which follows from (2.60). Since by (2.60) and the bound it follows that decreases to the left of and the limit
| 7.581 |
exists. Assume by the way of contradiction that . We look more closely at the leading order behaviour of the right-hand side of (2.59) on approach to the blow-up point . Since
| 7.582 |
by Lemmas 7.7 and 7.9, and the assumption it is easily seen that
| 7.583 |
where has the property
From (7.582) and (7.583) it is now clear that there exist constants such that
| 7.584 |
for some constant . Integrating the above differential inequalities over an interval and letting , we conclude
| 7.585 |
in a possibly smaller open right neighbourhood of . By (2.60) we have , which together with (7.585) shows that there exist some positive constants such that
| 7.586 |
in a small open right neighbourhood of . Integrating (7.586) we conclude that
| 7.587 |
which contradicts the assumption . It follows that in particular .
Corollary 7.12
(Uniformity-in-) There exist a constant and such that for all we have the uniform bounds
| 7.588 |
where is the maximal existence interval to the left from Theorem 2.5.
Proof
Both constants C and a in (7.580) can be chosen to be -independent for sufficiently small and so we obtain a uniform upper bound on the maximal time . Since by the construction , where is the -independent constant from Theorem 7.4, we conclude the proof.
The Massive Singularity
Definition 7.13
(The massive singularity) The hypersurface defined through
is called the massive singularity.
In this section we compute the precise blow up rates of the RLP-solution at the massive singularity. To this end, it is convenient to introduce the quantity
| 7.589 |
Lemma 7.14
The limits and exist and are finite. Moreover and
Proof
We let
| 7.590 |
We use (7.556)–(7.557) to derive a differential equation for Q:
| 7.591 |
where the function is given by
| 7.592 |
By the invariance of the flow, we know that and in particular the function is nonnegative on . Integrating (7.591) we conclude that
| 7.593 |
We observe that is a bounded function on and is bounded from above by and therefore . Since Q is bounded, it follows from (7.593) that . For any we conclude that
In particular, Q is uniformly continuous on and therefore exists as claimed. Since by Lemma 7.9 we have . To show that exists it follows from (7.585) and the continuity of Q that we only need to show the continuity of at . However, by Lemma 7.10 the quantity is uniformly bounded from above on approach to and by (7.585) as , so that necessarily converges to 0 as . Therefore is continuous and it converges to at .
Lemma 7.15
There exist positive constants such that
| 7.594 |
| 7.595 |
Moreover
| 7.596 |
Proof
Dividing (2.58) by and using (7.589) we obtain
| 7.597 |
The right-hand side has a strictly positive limit by Lemma 7.14, where equals
| 7.598 |
and we may write the limit in the form . We may now integrate (7.597) to conclude (7.595). Analogously, we divide (2.59) by and obtain
| 7.599 |
By Lemma 7.14, the right-hand side converges to a limit denoted by , given by
| 7.600 |
We may now integrate (7.599) to conclude (7.594). Since by (7.594) and (7.595) , it follows by multiplying (7.598) and (7.600) that
| 7.601 |
Since by Lemma 7.14, we may divide by above and reduce the problem to the linear equation , hence . From (7.598) and (7.600) we now conclude (7.596).
Proposition 7.16
(Massive singularity) Let be given by (7.596). There exists a such that on approach to the massive singularity the solution of (2.58)–(2.60) obeys the following asymptotic behaviour:
| 7.602 |
| 7.603 |
| 7.604 |
Moreover, the quantities , , defined by the extension of (2.68) and (3.107) to respectively, satisfy
| 7.605 |
The star density and the Ricci scalar blow up on approach to .
Proof
We introduce , we can rewrite (7.591) in the form
| 7.606 |
where
From (7.585) and Lemma 7.15 we immediately have
| 7.607 |
| 7.608 |
We now consider for some fixed and integrate (7.606). We obtain
| 7.609 |
For any there exists a such that . It is then easy to see that
We use the bound in (7.609) and conclude
| 7.610 |
Plugging this back into (7.597) and (7.599) allows us to obtain the (suboptimal) rates (7.602)–(7.603). Upon dividing (2.60) by and integrating, using (7.602), for any we obtain
| 7.611 |
which proves (7.604).
The asymptotics for in (7.605) follows directly from (7.603) and (7.494). The asymptotics for in (7.605) can be read off from (7.603)–(7.604), (2.69), and the identity (3.98), which in the variables reads
| 7.612 |
for some constant . It then follows from (7.612) that as , .
From (2.57), we conclude that , where we slightly abuse notation by continuing to denote to signify the selfsimilar energy density (see (2.19)). Therefore by (2.19), for any
| 7.613 |
The fluid density therefore implodes along and as a consequence of (2.75), the Ricci scalar blows up at .
Remark 7.17
We can now use the asymptotic rates from from the previous lemma to replace the rough upper bound , by the sharp upper bound rate . This can then be bootstrapped to obtain the near optimal next order correction in the rates (7.603)–(7.602), where can be replaced by . We do not pursue this here, as it will not be needed in the rest of the paper.
Causal Structure of the RLP Family of Solutions
As explained in Section 2.6, Theorems 2.3, 2.4, and 2.5 imply the existence of a maximally selfsimilarly extended RLP spacetime, recall Definition 2.7. The standard ODE-theory implies that the solution is indeed real-analytic in Y on . We next show that the RLP-spacetimes are not asymptotically flat and compute the associated mass-aspect function as .
Lemma 8.1
( is not asymptotically flat) The RLP spacetimes are not asymptotically flat, i.e. for any , . More precisely the mass aspect function satisfies
where is the -independent constant introduced in Lemma 6.5.
Proof
Fix a . As R increases to we have . Recalling (2.10) we have
| 8.614 |
where we have changed variables and used in the second equality, the l’Hospital rule in the third, and (6.454)–(6.455), (2.33), Remark 7.2 in the last. Note that by (7.499)–(7.501).
As stated in [28], it is clear that along any line of the form the density diverges as . A similar statement applies when we approach the scaling origin (0, 0) along the lines of the form , . In particular, by (2.75) the Ricci scalar blows up at (0, 0) and this is a geometric singularity. We now proceed to study the radial null-geodesics that “emanate" from this singularity. We shall henceforth use the abbreviation RNG for the radial null geodesics.
Lemma 8.2
- (a)
- In the -plane the outgoing/ingoing RNG-s respectively satisfy the equations
whenever the right-hand side is well-defined.8.615 - (b)
- Similarly, in the -plane the outgoing/ingoing RNG-s respectively satisfy the equations
whenever the right-hand side is well-defined.8.616 - (c)
- If we let , then the curve is a simple outgoing/ingoingRNG (see Definition 2.11) if and only if
where8.617 8.618
Proof
Proof of part (a). Equation (8.615) is just the condition that the radial geodesic has null length in the local coordinates (2.70).
Proof of part (b). In the local coordinates (2.65) the RNG-s satisfy
| 8.619 |
where it is understood that in the above expression. Reparametrising by the above ODE, we obtain
| 8.620 |
or equivalently
| 8.621 |
Upon taking the square root, solutions to the equation (8.621) are given by the solutions of (8.616).
Proof of part (c). The proof follows by direct substitution in (8.616).
Remark 8.3
For the purpose of describing the causal structure of the selfsimilar spacetimes under consideration, it is convenient to introduce the function
| 8.622 |
where is the selfsimilar coordinate associated with the patch (2.65) and we keep the index to emphasise the dependence on . It is then straightforward to check from part (c) of Lemma 8.2 that an RNG , , is simple if and only if
| 8.623 |
Formulas (8.618) and (8.622) give the obvious factorisation property:
| 8.624 |
Proposition 8.4
Let be the function given by (8.622). There exists an such that the following statements are true.
- (a)
- The function satisfies the formula
8.625 - (b)
- There exists an such that for all and
8.626 - (c)
- For any fixed we have
8.627 8.628
Proof
Proof of part (a). By (2.68) we have for any
| 8.629 |
where the index is added to emphasise the dependence on . We used the formula (2.56) in the third equality, and (7.498) to express in terms of , , and in the fourth. Since the right-most side of (8.629) extends analytically to by Theorems 7.4 and 2.5 the claim in part (a) follows.
Proof of part (b). Note that for by (8.629)
| 8.630 |
We now fix , a constant provided by the local extendibility statement of Theorem 7.4. In particular, by part (a) of Theorem 7.4 there exists a such that for all we have , and . By letting in (8.630) we conclude that
| 8.631 |
Proof of part (c). Claim (8.627) follows from the formula (8.629) and the asymptotic behaviour (7.499)–(7.503). To prove (8.628) we work directly with (8.622) and use (7.605). This gives
| 8.632 |
We are now ready to prove Theorem 2.12.
Proof of Theorem 2.12. Our first goal is to show that for there exist at least two solutions to the equation (8.623). By parts (b) and (c) of Proposition 8.4 it is now clear that the function converges to 0 at and , but necessarily peaks above at , where is given by Theorem 7.4. Therefore there exist and such that (8.623) holds with and . Since are strictly negative and necessarily zeroes of defined by (8.618), they must in fact be zeroes of and therefore represent outgoing simple RNG-s. Note that the function is real analytic on and therefore the number of zeroes is finite. By slight abuse of notation we enumerate the zeroes as in (2.77).
We recall the relationship (2.56) between the comoving selfsimilar coordinates y and Y, as well as the relation between the comoving coordinate y and the Schwarzschild coordinates x in Subsection 3.2. Recalling the sonic point , the slope of the sonic line in the Y-coordinates is given by
| 8.633 |
The next lemma is important for the description of ingoing null-geodesics. It in particular implies that the curve is the unique simple ingoing RNG.
Lemma 8.5
For any , consider the relativistic Larson-Penston spacetime given by Definition 2.7. Then there exists a such that the curve
| 8.634 |
represents a simple ingoing null-geodesics i.e. the boundary of the past light cone of the scaling origin . Moreover, the curve is the unique simple ingoing RNG and the following bounds hold:
| 8.635 |
| 8.636 |
where is defined in (8.618).
Proof
By Theorem 2.12 it suffices to show that there exists a which solves the equation (8.623). By part (c) of Proposition 8.4 we know that the function converges to 0 at . On the other hand, from (8.622) and (2.68) we have
| 8.637 |
Therefore, at the sonic point we conclude , which implies that is larger than for all . By continuity, there exists an such that . Now observe that by (8.637), the zeroes of the function are in 1-1 relationship with the zeroes of the function . It is shown in Lemma A.4 that the map is strictly monotone on and the uniqueness claim follows. Inequalities (8.635)–(8.636) are a simple consequence of the factorisation (8.624), the above monotonicity, and the positivity of for all .
Definition 8.6
We refer to the region in the future of the backward null-curve as the exterior region, and the region in the past of the null-curve as the interior region, following here the terminology in [6], see Figure 5.
Remark 8.7
For any in the exterior region, we note that is clearly positive for . When we may rewrite this expression as , which is then positive by Lemma 8.5 for sufficiently small . On the other hand, the expression is clearly positive for . If , we may rewrite it as , which is then necessarily positive. This shows that the right-hand side of the null-geodesic equation appearing in (8.616) is well-defined in the exterior region .
Lemma 8.8
(General structure of radial null geodesics)
For any point in the interior region, the future oriented ingoing null curve through remains in the interior region and intersects the surface at some .
For any point in the exterior region, the future oriented ingoing null curve exits the exterior region by intersecting and also intersects at positive values of the R-coordinate.
For any in the union of the exterior and the interior region, the outgoing null curve through exists globally-in- and . Moreover, no such curve can converge to the scaling origin to the past.
Proof
Proof of part (a). Assume now that is in the interior region. The future oriented ingoing geodesic must stay in the interior region, as it cannot cross the backward light cone by the ODE uniqueness theorem. In the interior region it is more convenient to switch to the original comoving coordinates as they also cover the centre of symmetry surface . Let correspond to . The ingoing geodesic equation reads and the interior region is characterised by the condition . Let now for . We then have In particular , the right-hand side is smooth, and there are no fixed points of the above ODE on the interval . We wish to show that the time T it takes to reach is finite. Integrating the above ODE, we see that
where , . Note that by (3.95). We next use (2.73) and to conclude that, as , the denominator inside the integral above asymptotes to a constant multiple . Since the latter is integrable near , it follows that , as desired.
Proof of part (b). Let belong to the exterior region. We consider the change of variables and the particle label R as a function of Y. By (2.55) and the geodesic equations (8.616), along any null-geodesic we have
| 8.638 |
where
| 8.639 |
We note that by Remark 8.7 all the denominators appearing above are nonzero. Therefore the geodesic equations (8.616) transform into
| 8.640 |
For as long as we can rewrite the above ODE in the form
| 8.641 |
We remark that by Lemma 8.5 the denominator is strictly positive in the exterior region and in the case of outgoing geodesics, function is in fact strictly positive for all (positivity of characterises the region “below" ).
For the ingoing geodesics, the exterior region is invariant by the flow. We integrate (8.641) to conclude that (with )
| 8.642 |
The map is smooth and by Lemma 8.5 it is strictly positive on the interval . Therefore, R is positive as the ingoing RNG traverses and , as the right-hand side of (8.642) is finite for any .
Proof of part (c). Let belong to the exterior region. The outgoing null-geodesic solves the ODE
Note that is smooth on . Since is the largest negative root of , the right-hand side above is negative. It follows that is decreasing on , i.e. R(Y) increases as Y approaches from the right. In particular, the solution exists for all by the strict negativity of the right-hand side above. We consequently have the formula
| 8.643 |
Since the function is positive for , if is the first term of Taylor expansion of G at , with (recall that G is real analytic), then necessarily . Plugging this expansion into (8.643) and integrating we conclude , which shows that the outgoing null-geodesic asymptotes to . Since and , it follows that , and therefore the outgoing geodesic exists globally on and . If belongs to the interior region, a similar analysis in the original comoving coordinates yields the same conclusion.
Since the function is smooth and bounded in a neighbourhood of , it follows from (8.643) that any outgoing geodesic starting at with intersects axis (i.e. ) at a positive value of R to the past. Due to the monotonicity of the flow (8.643), any outgoing geodesic emanating from with remains below axis to the past.
Asymptotic Flattening of the Selfsimilar Profile
The key result of this section is the local well-posedness for the characteristic initial value problem for the Einstein-Euler system, see Theorem 9.4. The idea is to suitably truncate the selfsimilar spacetime as described in Section 2.7. We work with the double-null formulation, see Section 2.7.1, and our starting point is the reformulation of the fluid evolution equations (2.87)–(2.88).
Reformulation of the Fluid Evolution and the Effective Transport Velocity
We introduce the constant
| 9.644 |
where we recall is given by (2.38) and from (9.644) it is clear that .
Lemma 9.1
(Reformulation of the Euler equations) Assume that is a solution of (2.87)–(2.88). Let
| 9.645 |
| 9.646 |
| 9.647 |
Then the new unknowns satisfy
| 9.648 |
| 9.649 |
Proof
Let and . Using (2.91) we rewrite . Therefore, (2.87)–(2.88) can be rewritten in the form
| 9.650 |
For any we now compute and thereby use (9.650):
| 9.651 |
We see that the last line (9.651) vanishes if k is a solution of the quadratic equation
| 9.652 |
The two distinct roots of (9.652) are given in (9.644), and the equation for reads
When , we keep as the unknown. When however , we work with instead, to avoid singularities for small values of . From above we obtain the equation
Going back to original variables, note that and so that
where we recall (9.645)–(9.647).
Fig. 9.
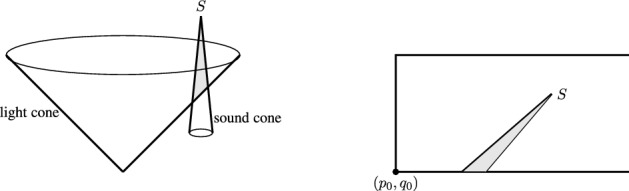
The grey shaded area in the infinite rectangular region is a schematic depiction of the region bounded by the backward fluid characteristics emanating from a point . The opening angle is of order , which of course is precisely the speed of sound
Remark 9.2
It follows from (9.646)–(9.647) that
| 9.653 |
Moreover, from (2.82) and (9.646)–(9.647) we have , which leads to the relation
| 9.654 |
Statement of the Local Well-Posedness Theorem
In order to flatten the the metric at asymptotic infinity, we shall treat the system (2.83)–(2.84) and (9.648)–(9.649) as the evolutionary part and equations (2.86)–(2.85) as the constraints.
Fixing the Choice of Double-Null Coordinates
We now fix a choice of double-null coordinates which will then be used to dampen the tails of the solution and produce an asymptotically flat spacetimes containing a naked singularity. Let be a given point in the exterior region (see Definition 8.6 and (2.66) for the definition of ). Through we consider the ingoing null-curve which intersects the outgoing null-curve (given by ) at some where by Lemma 8.8, . We then fix the null-coordinate by demanding that
| 9.655 |
and demanding that the level sets of correspond to outgoing null-geodesics. The choice (9.655) normalises to correspond to the hypersruface in the RLP-spacetime. Note that in the RLP spacetime, the ingoing curve through terminates at the massive singularity to the future.
Let now the outgoing null geodesic through intersect the surface (boundary of the past of the scaling origin ) at . We then fix the null coordinate by demanding that
| 9.656 |
and demanding that the level sets of correspond to ingoing null-geodesics. The normalisation (9.656) makes the surface correspond to the hypersurface . A more detailed description of the RLP-spacetime in this double-null gauge is given in Lemma A.1.
Let be the point in the above double-null gauge. We shall consider the seminfinite rectangular domain
| 9.657 |
where is sufficiently small, with data prescribed on the set where
| 9.658 |
| 9.659 |
correspond to the ingoing and the outgoing null-curves emanating from respectively. See Figure 6.
Norms and Local Well-Posedness
Fix so that
| 9.660 |
and let be a small fixed constant. For any and , we define the total norm by
| 9.661 |
where
| 9.662 |
| 9.663 |
| 9.664 |
and the data norm
We choose the data on to coincide with the corresponding data obtained by restricting the RLP-solution to . Let be a real number to be specified later.
-
(i)
The data on is chosen so that coincide with the exact selfsimilar solution on the segment ;
-
(ii)
, and with and ;
-
(iii)
the constraint equations (2.85)–(2.86) hold on and respectively.
Due to the choice of the double-null gauge (9.655)–(9.656), the metric coefficient is determined along . In order to impose the constraint (2.85) we can solve it for . By (9.656) we have and by (2.89) and Remark 9.2 we may rewrite (2.85) as
| 9.665 |
Moving the copy of to the left-hand side and then integrating, we obtain the formula
| 9.666 |
Remark 9.3
(The Hawking mass) We recall the Hawking mass introduced in (2.10). It can be alternatively expressed via the formula
| 9.667 |
Using (2.83)–(2.86) one can show that for classical solutions of the Einstein-Euler system we have the identities
| 9.668 |
| 9.669 |
see for example Section 1.2 of [9]. Using (2.89) we may rewrite the right-hand side of (9.669) as . Integration along a constant -slice then gives
| 9.670 |
We now state the main local existence and uniqueness theorem for the characteristic problem described above.
Theorem 9.4
There exist sufficiently small such that for any and , with initial boundary data satisfying (i)-(iii) above, there exists a unique asymptotically flat solution to the system (2.83)–(2.84) and (9.648)–(9.649), with , , and such that . Moreover, this solution is a solution of the original system (2.83)–(2.88).
We shall prove Theorem 9.4 by the method of characteristics. Our strategy is to first solve the fluid evolution equations for given the effective fluid velocity and the metric components . Then we will feed that back into the wave equations (2.83)–(2.84) for the metric components to obtain the bounds for . To make this strategy work, in Section 9.3 we carefully look at the characteristics associated with the fluid evolution. After collecting some preparatory a priori bounds in Section 9.4, in Section 9.5 we use an iteration scheme to conclude the proof of Theorem 9.4.
Characteristics for the Fluid Evolution
Let be the backward characteristics associated with the speeds such that
| 9.671 |
| 9.672 |
Since our solutions as well as reside in the domain and the boundary, we track the backward characteristics until they leave the domain. In the next lemma, we show the existence and regularity properties of and exit time and position .
Lemma 9.5
Let . Suppose or and on for some . Then for any given , there exist a unique exit time and position such that
A unique solution or of (9.671) and (9.672) exists so that .
- At , where and it satisfies
If then .9.673 .
If , or .
In particular, if , then .
Proof
We prove the claims for as the case of follows in the same way. The local existence and uniqueness of follows from via the Picard iteration
| 9.674 |
Thanks to the positive uniform bound of and Grönwall, the solution can be continued as long as the characteristics belong to the domain . Since , , will exit the domain either through the outgoing boundary or through the ingoing boundary . We denote such an exit time by and the associated value where . Note that for each given , is uniquely determined since the backward characteristics are unique. By integrating (9.671) from to , we see that satisfies (9.673). We observe that if , and , and (9.673) reads as
| 9.675 |
If , and is given by (9.673).
Clearly is continuous in and . Since higher regularity of fails in general at the corner of the domain where , we show the regularity when . First let be given. Suppose . Consider a small neighborhood of in such that , . Recalling (9.675), we define an auxiliary function by
Then since , while we have and . Therefore, by the implicit function theorem, in a small neighborhood of .
Lastly, since , if , the backward characteristics will intersect the outgoing surface , in which case .
A Priori Bounds
In this subsection, we provide estimates for various quantities appearing the iteration scheme in terms of our norms. We will frequently use the following inequality: for any positive function
| 9.676 |
which directly follows from and .
Lemma 9.6
Suppose . Then the following holds:
| 9.677 |
| 9.678 |
where and are continuous functions of their arguments.
Proof
We start with (9.677). For , it is easy to see that
| 9.679 |
where the right-hand side is a continuous function of by (9.676). For , since
we have
| 9.680 |
which shows (9.677). Lastly, from
we obtain
| 9.681 |
This completes the proof of (9.677). The estimation of (9.678) follows similarly, we omit the details.
Lemma 9.7
( bounds) Suppose . Then the following holds:
| 9.682 |
where is a continuous function of its argument.
Proof
From the first condition of our choice in (9.660), we may rewrite as
Then by (9.676), we see that
| 9.683 |
which shows (9.682) for . Next computing as
| 9.684 |
we obtain
| 9.685 |
Together with (9.679), it implies (9.682) for . Moreover, since
| 9.686 |
we have
| 9.687 |
Using (9.680) and (9.685), we deduce (9.682), where we recall (9.661).
Remark 9.8
The relation in (9.660) is importantly used to ensure the boundedness (both upper and lower) of the transport speed .
We introduce the constant :
| 9.688 |
where we have used (9.660) in the second equality.
Lemma 9.9
Suppose . Then the following bounds hold:
| 9.689 |
| 9.690 |
where and are continuous functions of their arguments.
Proof
We will first prove (9.689). We start with . Using (9.688), we rewrite as
from which we have
| 9.691 |
By (9.676), the claim immediately follows. We next compute
| 9.692 |
and obtain
| 9.693 |
With (9.679) and (9.691), it gives (9.689) for . We next have
| 9.694 |
and therefore
| 9.695 |
Hence the claim follows from (9.691), (9.693) and (9.677).
The proof of (9.690) follows easily from (9.689) by applying the product rule for or by estimating them directly in the same way as done for (9.689). We omit the details.
In the iteration scheme, we will make use of the Hawking mass m given in (9.667). From (9.669) and (2.82) we see that the Hawking mass satisfies
| 9.696 |
We observe that p-derivatives are not featured in our function space hierarchy, however appears in the above expression. To go around this difficulty, we observe that (2.83) can be formally rewritten in the form
| 9.697 |
where we have used (2.89) and (9.653) in the second equality. Therefore, rather than directly estimating m from (9.667), we slightly abuse notation, and redefine m to be
| 9.698 |
where
| 9.699 |
| 9.700 |
We observe that is well-defined at since the data there is given by the exact selfsimilar RLP-solution. We note that corresponds exactly to for a -solution of the problem. In the following, we show that m in (9.698) can be estimated by using the norm .
Lemma 9.10
Suppose . Then the following holds:
| 9.701 |
| 9.702 |
where and are continuous functions of its argument.
Proof
We first observe that from (9.700) using and
| 9.703 |
and
| 9.704 |
From the definition of the boundary data norm, we have . For the integral term in (9.698), using (9.688) and (9.660), we rewrite the integrand as
| 9.705 |
so that
where we have used . Hence, using (9.676), we deduce (9.701). Moreover since
| 9.706 |
from (9.705), we immediately obtain
| 9.707 |
which shows (9.702) for . Lastly, we compute as
| 9.708 |
where and . Following the same strategy, it is now clear that is bounded by a continuous function of . This finishes the proof.
Proof of the Local Well-Posedness
Iteration Scheme
We now set up the iteration scheme. Let be given so that . And let and be given in (9.654) and (9.698) where :
and
Here is given by the right-hand side of (9.700) where . We then define to be the solution of the following system
| 9.709 |
| 9.710 |
| 9.711 |
with given characteristic data satisfying the conditions (i)–(iii) as in Theorem 9.4. We note that for exact solutions, (9.710)-(9.711) are equivalent to (2.83), (2.84).
Our next goal is to prove the solvability of the iterative system (9.709)-(9.711) and derive the uniform bounds of for sufficiently small . Let .
Proposition 9.11
Let the characteristic data satisfying the assumptions of Theorem 9.4 be given. Suppose . Then there exist sufficiently small depending only on such that for all there exists a unique solution , to (9.709)-(9.711) with on satisfying
| 9.712 |
Proposition 9.11 immediately follows from the following two lemmas.
Lemma 9.12
(Solving the Euler part) Assume the same as in Proposition 9.11. Then there exist sufficiently small depending only on such that for all there exists a unique solution to (9.709) with on satisfying
| 9.713 |
Lemma 9.13
(Solving the metric part) Assume the same as in Proposition 9.11. Then there exist sufficiently small depending only on such that for all there exists a unique solution to (9.710)-(9.711) with on satisfying
| 9.714 |
In what follows, we prove the above two lemmas. We start with Lemma 9.12.
Proof
(Proof of Lemma 9.12 (Solving the Euler part).) For the sake of notational convenience, throughout the proof, we use , , , so that the variables without the indices refer to the ones from the n-th step.
Uniqueness follows from the uniqueness of characteristics since solutions satisfy the ODE along the characteristics
| 9.715 |
The existence follows by the integral representation of (9.715)
| 9.716 |
where and is the exit time and position associated with constructed in Lemma 9.5. We focus on verifying the desired regularity and estimates.
First of all, clearly since is continuous. To estimate , we take log of (9.716) and rewrite it as
| 9.717 |
For the first term, we may write it as
Since , it suffices to estimate . To this end, first let . Then we have
In particular, using , we have . Hence,
| 9.718 |
for sufficiently small . If , we have and . Hence in this case, for sufficiently small ,
| 9.719 |
We next estimate the integral term in (9.717). Using for all , and ,
| 9.720 |
Therefore by (9.717), (9.718), (9.719), (9.720), we obtain
| 9.721 |
Next we show that is continuous. Since if by Lemma 9.5, the right-hand side of (9.716) is and thus if , is clearly continuous. Therefore, it suffices to show that is continuous when and . To this end, let and , and take any in a small neighborhood of such . Then we have and hence is continuous. In fact, for any with we can solve the equations for :
along the characteristics and obtain the integral representation
| 9.722 |
where
where is the usual Kronecker delta. Notice that the integral terms are all continuous due to the continuity of in Lemma 9.5 and therefore .
To estimate , as done in (9.718) and (9.719), we first observe that . Then for sufficiently small we have
| 9.723 |
Based on the integral representation (9.722) we proceed to estimate
| 9.724 |
where we have used the first bound in (9.723).
For the second term in (9.722),
where we have used the upper bound as it follows from (9.723) for sufficiently small. Therefore, we deduce that
| 9.725 |
From (9.716), since , we just need to estimate . After applying to the equation (9.709), we have the following integral representation:
| 9.726 |
Analogously to the previous step, we obtain
| 9.727 |
We now collect (9.721), (9.725), (9.727) and use (9.677), (9.682) as well as to deduce (9.713) for sufficiently small . This completes the proof.
Proof
(Proof of Lemma 9.13 (Solving the metric part).) As in the previous proof, for the sake of notational convenience, throughout the proof, we use , , , so that the variables without the indices refer to the ones from the n-th step.
Since (9.710), (9.711) are linear inhomogeneous ODEs, we directly integrate them to solve for and . As the existence is clear, we focus on the estimates.
We now integrate (9.710) along an ingoing null curve from to to obtain
| 9.728 |
with
| 9.729 |
We first estimate . To this end, we bound the integral term of (9.728) as
| 9.730 |
where we have used . Therefore, we have
| 9.731 |
We also have
| 9.732 |
Since , for sufficiently small we obtain
| 9.733 |
On the other hand, from (9.729) and (9.731), the upper bound of is easily obtained: since and using (9.731),
| 9.734 |
Next we use (9.732) to first obtain from (9.729)
| 9.735 |
where we have used the following: if , then , while if , . As done in (9.733), we deduce
| 9.736 |
We now differentiate (9.710) with respect to and integrate:
| 9.737 |
Now the estimation of follows similarly. Using ,
| 9.738 |
The third derivative can be estimated analogously:
| 9.739 |
We proceed in the same way for . By integrating (9.711) along an ingoing curve we obtain the expression for
| 9.740 |
with
| 9.741 |
To estimate , we start with the integral term of (9.740). By taking the sup norm, and using , we obtain
| 9.742 |
and hence
| 9.743 |
For , we first estimate the integral of (9.741).
Therefore we deduce
| 9.744 |
To estimate , we first observe that
| 9.745 |
wherefrom we deduce
| 9.746 |
Similarly one can derive
| 9.747 |
We now collect (9.731), (9.733), (9.734), (9.736), (9.738), (9.739), (9.743), (9.744), (9.746), (9.747) and use (9.689), (9.690), (9.678), (9.701), (9.702) as well as to deduce (9.713) for sufficiently small . This concludes the proof.
Convergence of the Iteration Scheme
From Proposition 9.11, the solutions of (9.709), (9.710), (9.711) have the uniform bounds for all . In this section, we show the convergence of the sequence of approximations . We will estimate the difference between and . Let
| 9.748 |
for . Our next task is to prove the corresponding difference bounds.
Proposition 9.14
Let be the solution (9.709), (9.710), (9.711) enjoying the uniform bounds for all . Then the difference norm for defined in (9.748) satisfies the following recursive inequality
| 9.749 |
where
| 9.750 |
and C does not depend on n but only on .
The proof relies on estimates of and estimates of in the spirit of Lemma 9.12 and Lemma 9.13. Before giving the proof, we present some preliminary estimates. First, we note that satisfy
| 9.751 |
| 9.752 |
| 9.753 |
with .
We start with the following inequality, which will allow us to compare the difference of two functions to the logarithm of their ratio.
Lemma 9.15
Let be given. For any , the following holds
| 9.754 |
Proof
If , we claim . Letting , we have and for . Hence for . Now let . Then since for , for , which shows (9.754).
Lemma 9.16
For any let
| 9.755 |
and
| 9.756 |
Note that , , are finite by the uniform bound . Then the following bounds hold:
| 9.757 |
| 9.758 |
| 9.759 |
Proof
(9.757) and (9.758) are direct consequences of (9.754), (9.755) with , , , . (9.759) directly follows by writing
We are now ready to prove Proposition 9.14.
Proof of Proposition 9.14
We start with . We recall the notations from Lemma 9.12. By integrating (9.751) along the characteristics and using the zero data, we have the representation of :
| 9.760 |
where
| 9.761 |
Using for all and ,
| 9.762 |
For , we rewrite
| 9.763 |
Note that factors next to the rectangular brackets are all uniformly bounded. By Lemma 9.16, we deduce that
| 9.764 |
where is independent of n and hence using the uniform bounds of the uniform bounds of and , we have
| 9.765 |
where is independent of n. For , we first rewrite
| 9.766 |
Now by using the uniform bounds on and , Lemma 9.16, (9.764), and , we deduce
| 9.767 |
We now estimate . We recall the notations used in the proof of Lemma 9.13. We first integrate (9.752) along an ingoing null curve from the initial point to to obtain
| 9.768 |
where
| 9.769 |
The last factor of can be rewritten via add and subtract trick as done for in (9.763). Then using , Lemma 9.16, the uniform bounds, we deduce that
| 9.770 |
By integrating (9.768) with respect to , we have . Then by writing , we deduce that
| 9.771 |
The estimates for can be derived in the same fashion. By integrating (9.753),
| 9.772 |
where
| 9.773 |
The structure of is similar to in the previous case. Using the uniform bounds for and and Lemma 9.16, we have
| 9.774 |
for some independent of n. For , we rewrite it
| 9.775 |
The second term is in the form where we can apply Lemma 9.16. For the first term, note that
| 9.776 |
where we also recall (9.700) for . As done for in (9.763), it is evident that the integrand can be written as the sum of the terms that contain one of the forms in Lemma 9.16 or or where
Following the strategy of the proof of (9.701) in Lemma 9.10, using Lemma 9.16 and the uniform bounds of and , we deduce
| 9.777 |
Thus the term gives the desired estimates and hence
| 9.778 |
for some constant independent of n. The estimation of directly follows from and (9.778):
| 9.779 |
for some constant independent of n. Collecting (9.765), (9.767), (9.770), (9.771), (9.778), (9.779), we obtain (9.749).
We will now finish the proof of Theorem 9.4.
Proof of Theorem 9.4
Convergence and uniqueness. By Proposition 9.11 and Proposition 9.14, the iterates satisfy the uniform bounds for all . Moreover as , which in turn implies the strong convergence in for and in for by standard interpolation. Hence, as , converges to strongly in and to in . Using the strong convergence shown above, the fundamental theorem of calculus, and the formulas (9.722), (9.728)–(9.729), (9.737), (9.740)–(9.741), and (9.745), we may pass to the limit as to conclude that and . In particular, using (9.697) and (9.710), upon passing to the limit we obtain a classical solution of (2.83). After passing to the limit in (9.709)-(9.711), we see that is the desired classical solution to (2.83)–(2.84) and (9.648)–(9.649) in . Note that in fact , which follows easily from (2.84), (9.697) and the bootstrap argument (involving one application of the -derivative) similarly to above.
Observe that and by standard weak-* convergence arguments, since the iterates are uniformly bounded in the same spaces. Uniqueness easily follows an adaptation of the difference estimates of Proposition 9.14. To show that the solution corresponds to the solution of the original problem (2.83)–(2.88), it only remains to show that the constraint equations (2.86)–(2.85) are satisfied on the interior of the domain . This is a standard argument, which follows from the observation that for the solutions of (2.83)–(2.84) and (2.87)–(2.88) necessarily and . Since the constraints are satisfied by the characteristic data, this gives the claim. Note that these expressions make sense given the above shown regularity.
Asymptotic flatness. To show the asymptotic flatness we must show that for all . By (9.670) this follows if we can show that and are integrable on . Note that by the boundedness of our norms. Moreover, by integrating (9.697) with respect to and using and the boundedness of , we conclude that From (9.653) we have
| 9.780 |
where we recall from (9.688). Therefore since . To show that is integrable, we observe that
Using (2.82) and (9.654), we also have the expression
| 9.781 |
where we have used (9.660), (9.676), and the boundedness of our norms. Therefore, from (9.780) we conclude , and the spacetime is therefore asymptotically flat.
Proof of Theorem 1.2: Existence of Naked Singularities
Recall the discussion of naked singularities in the introduction and in Section 2.7.3. Following [32], a spacetime contains a naked singularity if it corresponds to a maximal hyperbolic development of suitably regular data, and the future null-infinity is geodesically incomplete. The latter statement does not actually require the construction of future null-infinity as an idealised boundary attached to a suitable spacetime compactification. Instead, we define it to mean that affine length of a sequence of maximal ingoing null geodesics initiated along a sequence of points (approaching infinity) along an asymptotically flat outgoing null-surface, and suitably normalised, is uniformly bounded by some positive constant.
Proof of Theorem 1.2. For any we consider the associated RLP spacetime given in Definition 2.7. We use it to prescribe the data for the characteristic problem in the region as described in Section 9.2. The associated solution to the Einstein-Euler system exists in region by Theorem 9.4. Since , and since the data are exactly selfsimilar on and on the finite segment , we conclude that the solution coincides with the selfsimilar RLP-solution in the region , see Figure 7. We now consider a new spacetime obtained by gluing together the solution in the region and to the past of the ingoing null-segment inside . Clearly, the new spacetime is identical to the RLP spacetime (and therefore smooth) in an open neighbourhood across . It therefore coincides with the exact selfsimilar RLP-spacetime in the past of .
The exterior region, viewed as a development of the characteristic problem with data prescribed along the semi-infinite rectangle with outgoing data prescribed on and ingoing data on is maximal, as the ingoing null-curve is incomplete on approach to the singularity. In fact, since along backward null-cone we have , we have
| 9.782 |
since , where we recall that the density is in fact strictly positive on . Therefore, by (2.75) the Ricci scalar blows up as the observer approaches the scaling origin along .
It remains to show that the future null-infinity is incomplete in the sense of Definition 1.1. from [32]. Consider now a sequence of points such that . For any , consider the future oriented ingoing radial null-geodesic emanating from . Let the affine parameter4 be denoted by . Then , and the angular coordinates are also constant. The -component satisfies the ODE
| 9.783 |
where we have used (3.869). By our assumptions and we normalise the tangent vector to be parallel to so that at , we have , where for all . Therefore We may integrate (9.783) once to conclude that and therefore
| 9.784 |
It then follows that
| 9.785 |
However, by the proof of Theorem 9.4 there exists a constant C which depends only on the data such that . In particular, by the mean value theorem , for any and . Note further that by (9.666) and our bounds on the data along , is bounded from below and above uniformly in n. For sufficiently small, we conclude that remains positive and reaches 0 (i.e. the Cauchy horizon) in finite -time, independent of n.
Remark 9.17
(The Cauchy horizon) By construction, the Cauchy horizon coincides with the null-curve .
Remark 9.18
By construction, for any there exists in fact an infinite family of naked singularity solutions. This freedom comes from the essentially arbitrary choice of the truncation in the region , modulo the size and decay limitations imposed by the local existence theorem, Theorem 9.4. In a neighbourhood of the scaling origin , our solutions are however exactly selfsimilar.
Acknowledgements
Y. Guo’s research is supported in part by NSF DMS-grant 2106650. M. Hadzic’s research is supported by the EPSRC Early Career Fellowship EP/S02218X/1. J. Jang’s research is supported by the NSF DMS-grant 2009458 and the Simons Fellowship (grant number 616364).
Appendix
Proof of Local Existence Around the Sonic Point: Combinatorial Argument
The main goal of the rest of this section is to show the convergence of the power series and . We will do so by induction on the coefficients and . Before proceeding, we record some technical lemmas. The proofs of Lemmas A.1–A.4 below are given in detail in [16] and we therefore only state the lemmas without proof for reader’s convenience.
Lemma A.1
There exists a constant such that for all , the following holds
| 1.786 |
| 1.787 |
| 1.788 |
| 1.789 |
Lemma A.2
There exists a constant such that for all and all , the following holds
| 1.790 |
For any , we let
Lemma A.3
Recall the set defined in (4.188).
- For each ,
holds.1.791 - There exist universal constants such that
1.792
Lemma A.4
Let be a given positive number. Let where and be given.
- If , there exists a constant such that
1.793 - There exist and such that if , the following holds:
1.794 - Let . Then there exists such that if , the following holds:
1.795
By Lemmas 4.1 and 4.6 there exist constants such that
| 1.796 |
| 1.797 |
for all , with chosen sufficiently small as in Lemma 4.1.
Lemma A.5
Let and . Assume that
| 1.798 |
| 1.799 |
for some and . Then there exists a constant such that
| 1.800 |
| 1.801 |
Proof
We first prove the bounds for , . The bounds and are obvious from (1.796). Clearly
| 1.802 |
where we have used . If we then have
| 1.803 |
for some constant . It is now clear, that the estimates for and , follow in the same way, as the only estimates we have used are (1.796) and the inductive assumptions (1.798)–(1.798), which both depend only on the index, and are symmetric with respect to and . Recalling from (4.194), the bounds (1.801) now immediately follow from (1.800) and (1.799).
Lemma A.6
Let and . Assume that (1.798) and (1.799) for and some large enough satisfying
| 1.804 |
where and are universal constants in (1.792) and Lemma A.4. Then there exists a constant such that
| 1.805 |
Proof
When , When it is easy to see from (4.190) that
| 1.806 |
In particular, for some universal constant and the claim is thus clear for . For , we rewrite in the form
| 1.807 |
Now clearly, by the inductive assumption
| 1.808 |
for a universal constant . To bound the second summand on the right-hand side of (1.807), we use (1.798) and Lemma A.3 first to conclude
where we have used in the third line since and . Hence, using , we observe that
| 1.809 |
In turn by recalling (4.190) and using Lemma A.3 and Lemma A.4 with , we see that
| 1.810 |
where C is large enough so that (1.804) holds. This proves (1.805).
Remark A.7
In (1.804) the constant 4 in the numerator ensures that for all , since for sufficiently small, there exists a constant such that for all .
Lemma A.8
Let and . Then there exists a constant such that if and for any , the following assumptions hold
| 1.811 |
| 1.812 |
then we have
| 1.813 |
| 1.814 |
for some universal constant .
Proof
We start with (1.813). Recall (4.255). First we show
| 1.815 |
Note that and thus (1.815) does not depend on . As in (1.809), using (1.811) and Lemma A.3, we have
Hence by using (1.795) of Lemma A.4, the left-hand side of (1.815) is bounded by
which shows (1.815). To estimate the second term on the right-hand side of (4.255), we use (1.811), (1.812) and (1.786) to obtain
| 1.816 |
Finally, we estimate the last term on the right-hand side of (4.255) - the expression - given by (4.256). To treat the first line of (4.256), by (1.811) and (1.805), we obtain
| 1.817 |
For the first term of the second line of (4.256), by (1.811), (1.801), (1.787)
| 1.818 |
The other two terms of the second line can be estimated analogously. For the first term of the third line of (4.256), by (1.811), (1.812), (1.800), (1.786) we obtain
| 1.819 |
The bound on the remaining term in the third line of (4.256) is entirely analogous. Collecting all the bounds (1.815), (1.816), (1.817), (1.818), (1.819), we conclude
| 1.820 |
which leads to (1.813) since and .
To prove (1.814), we first recall (4.258). Two first two terms on the right-hand side of (4.258) have the same structure as the first two terms in (4.255) and hence, by using the same uniform bound (1.796), they can be bounded analogously to (1.815) and (1.816). It remains to estimate given in (4.259). The first, second and sixth lines of (4.259) have the same formal structure as the first, second and third lines of (4.256) and hence we obtain the same bounds as in (1.817), (1.818), and (1.819) by using (1.812) in place of (1.811) when necessary. We focus on the third, fourth and fifth lines of (4.259). For the first term of the third line, by using (1.805)
| 1.821 |
where we have used for all and (1.790) with and . For the second term of the third line, we isolate , cases, cases, further and , and use (1.796), (1.805), (1.812)
| 1.822 |
To bound the summations appearing in the third and the fourth line of (1.822), we apply (1.790) six times with and additionally we use to bound them by
| 1.823 |
To bound the last line of (1.822) we use (1.787) and (1.790) to bound it by
| 1.824 |
For the fourth line of (4.259) we only present the details for the first term as the other two terms are estimated analogously. We first isolate and and then use (1.801), (1.790), and (1.786) to obtain
| 1.825 |
For the fifth line of (4.259) we only present the detail for the first two terms, as the estimate for the remaining two terms in the fifth line of the right-hand side of (4.259) is analogous and strictly easier. By (1.796), (1.812), (1.801) we have
| 1.826 |
The second term of the fifth line of (4.259) can be estimated in a similar way as in (1.822) by using (1.801) instead of (1.805):
| 1.827 |
where we have used (1.790) and (1.786) as before. Combining all the estimates, we deduce the desired bound (1.814).
Lemma A.9
Let and . Consider , constructed in Lemma 4.1 and Lemma 4.6, and let be given recursively by (4.264) and (4.265). There exist a constant and such that for all and all
| 1.828 |
| 1.829 |
for all .
Proof
The proof is based on induction on N. When , it is clear that there exists such that for any the bound
| 1.830 |
holds true for any . Fix an and suppose the claim is true for all . Then (1.811) and (1.812) are satisfied and therefore by Lemma A.8 we conclude that (1.813) and (1.814) hold for all . Together with (4.266) and (4.267), those bounds lead to
It is now clear that since we can choose sufficiently large and with sufficiently small so that and hence (1.828) and (1.829) hold true.
Null-Geodesic Flow in the RLP-Spacetime
We shall carry out the analysis of nonradial null-geodesics (NNG) in the comoving coordinates . Partial analysis of simple NNG-s in Schwarzschild coordinates was already carried out in [28] and a further analysis of non-spacelike geodesics was done in [19]. A related problem for the selfsimilar dust collapsing clouds was studied in detail in [29].
It is convenient to introduce
| 2.831 |
so that
| 2.832 |
correspond to the boundary of the backward light cone () and the “first" outgoing null-geodesic () respectively. Then and and hence and . It is straightforward to check that the homothetic Killing vector field takes the form and the metric g in these coordinates reads
| 2.833 |
We note that the metric is not regular at . This corresponds to a harmless coordinate singularity which can be easily avoided by introducing a suitable change of variables, see Section 7. We shall nevertheless work with (2.833) to avoid further notational complications and formally limit our analysis to the regions of satisfying and .
Let , be a null-geodesic and we denote the associated tangent vector by , . We let denote the affine parameter. Due to spherical symmetry, we have
| 2.834 |
The remaining geodesic equations read
| 2.835 |
where .
Lemma A.1
(Geodesic flow) Let be the tangent to a null-geodesic as above. Then, there exist constants such that
| 2.836 |
| 2.837 |
| 2.838 |
Moreover, the -component satisfies the quadratic equation
| 2.839 |
Proof
Equation (2.836) is just the statement that the 4-vector is null. We now let in (2.835). Since -terms do not depend on , from (2.835) we immediately see that , which implies (2.837). Since , we also obtain
| 2.840 |
Next let in (2.835). Since (cf. (2.833)) we deduce that from (2.835) and (2.838) follows.
Since , we obtain
| 2.841 |
which in turn gives
| 2.842 |
Using (2.840), we may rewrite (2.836) as
| 2.843 |
Recall that we work in a patch where . Plugging (2.842) into (2.843) to replace , we get
which is easily simplified to give (2.839).
Remark A.2
Relations (2.837)–(2.838) are the Hamiltonian constraints associated with the geodesic flow. Equation (2.837) expresses the conservation of angular momentum associated with the Killing vector field , while (2.838) is the conservation law generated by the homothetic Killing vector field .
Lemma A.3
Assume that there exists a simple nonradial null-geodesic, i.e. a null-geodesic such that and for all . Then is a critical point of the function
| 2.844 |
Proof
By our assumption, for any simple geodesic we have . By letting in (2.835), we then obtain the formula
| 2.845 |
Since in (2.841), we conclude that is -independent and therefore the left-hand side of (2.845) vanishes. Letting in (2.836) we have . We plug this back into (2.845) and the claim follows.
Lemma A.4
(Monotonicity of ) The function defined by (2.844) is strictly monotone on .
Proof
Recalling the notation , , and , we see that , written as a function of y can be written in the form
| 2.846 |
Therefore
| 2.847 |
where we have used the relation (see (2.33)), formula (3.97) for , and (3.99) to substitute for . We now use (3.117) and part (c) of Lemma 3.3 to obtain the formula
| 2.848 |
Using this in (2.847) we obtain
| 2.849 |
We now recall the formula
| 2.850 |
see (3.121). We plug it back into (2.849) to conclude that
| 2.851 |
Recall that for all . Moreover, by (6.469) and the inequality for all we know that that the function is increasing. It follows from (6.468) that there exists an -independent constant C such that for all , with sufficiently small. Since , , and , we conclude from (2.851) that for sufficiently small that is strictly positive for .
Lemma A.5
(: radial null-geodesics) Let as above. If the flow takes the form
| 2.852 |
while , are then recovered using (2.842). The behaviour of the solutions is described by Lemma 8.8.
Proof
Equation (2.852) is a simple consequence of (2.843). Equation (2.852) is equivalent to the radial null geodesic equation (8.641) expressed in -variables.
Lemma A.6
(: nonradial null-geodesics) Let as above and . Then any such geodesic that emanates from the union of the exterior and the interior region exists globally in its affine time and does not converge to the scaling origin.
Proof
Step 1. We first consider the case where . Then (2.842) gives the relation
| 2.853 |
In order for to satisfy (2.839) we must have since . In particular, the null geodesics are confined to the exterior region where and . Let and be given initial point in the exterior region. Then by integrating (2.853), we obtain
| 2.854 |
We recall that and for . Since , we deduce that () as or . Therefore a null geodesic in this case asymptotes to the backward light cone in the past and to the Cauchy horizon in the future. In particular, there are no null geodesics emanating from or going into the origin.
Step 2. We now consider the general case . Assume without loss of generality . In order for the solution of (2.839) to exist the discriminant must be nonnegative. This amounts to requiring
| 2.855 |
Note that , which follows from , (2.74), and , while by Proposition 7.16. Moreover, we also know , and for from the analysis of radial null geodesics. Therefore, for given , there exists such that for all and hence, the non-radial null geodesics cannot enter the part of the interior region .
Under the assumption (2.855), the solution to (2.839) is given by
| 2.856 |
From (2.842) we also have (recall )
| 2.857 |
Let
| 2.858 |
We then conclude that
| 2.859 |
Step 3. No simple NNG-s. By definition, we have for simple NNG-s. Therefore by (2.859) they must satisfy either or . The first case corresponds to simple radial null geodesics, while zeros of possibly describe the simple non-radial geodesics. We know that for all and thus, for all . Therefore we deduce that there is no simple non-radial null geodesics in the exterior (i.e. in the causal past of ). In the interior region however cannot correspond to a geodesic, since otherwise by Lemma A.3 we would have , but this is impossible by Lemma A.4.
Step 4. NNG-s cannot emanate from or go towards the scaling origin .
Step 4.1. First let and be given in the exterior region above (). Then the null geodesics satisfy
| 2.860 |
We start with part. In this case, the right-hand side of (2.860) is negative and hence the null geodesics are outgoing. We claim that outgoing null geodesics starting from and meet (namely ) for some positive in the past. Observe that there exist such that for all . Integrating (2.860), we have
| 2.861 |
The integral in the right-hand side is finite and using , the claim follows. On the other hand, in the future direction, since as , as and thus it asymptotes to the Cauchy horizon .
We move onto part, the ingoing case. As above, the null geodesics meet for some positive in the past as the corresponding integral stays finite. We claim that the null geodesics meets at positive in the future. Integrating (2.860), we have
| 2.862 |
for . To prove the claim, it suffices to show the integral is finite when . To this end, we rewrite the integrand as
for , where we have used (2.858) in the last line. It is now clear that both terms are finite and thus the integral is indeed bounded, thereby proving the claim.
Step 4.2. Next we let and be given in the exterior region below . The null geodesics satisfy
| 2.863 |
We start with part. In this case, we claim that the null geodesics meet for positive in the future and asymptotes to the past light cone in the past. The geodesic in the future satisfies
| 2.864 |
Observe that the integrand is positive and uniformly bounded. Therefore, the claim for the future follows. Now in the past, the right-hand side of (2.863) is positive and the denominator goes to 0 as . Therefore and as , and hence the null geodesics asymptote to .
We move onto part. Since the denominator is uniformly bounded for , the integral is finite and hence we deduce that the null geodesics meet for some positive in the future. On the other hand, the null geodesics in the past satisfy
| 2.865 |
We claim that they meet for finite . To this end, we rewrite the integrand as
for , where we have used (2.858) in the last line. It is now clear that both terms are finite and thus the integral is bounded, thereby proving the claim.
Step 5. NNG-s in the interior region. Using the same strategy as above, one can show that nonradial geodesics () starting in the interior region will asymptote to the past to the boundary of the backward light cone , and in the future they will asymptote to the Cauchy horizon to the future. In between, they will go through a turning point, which corresponds to the point , where is the zero of Q discussed above. We omit the details.
Einstein-Euler System in the Double-Null Gauge
Proof of Lemma 2.13
Proof of Lemma 2.13
Note that
| 3.866 |
We use (2.89) to obtain . Equations (2.83)–(2.86) now follow directly from Section 5 of [11]. Formulas (2.89)-(2.90) follow directly from (1.4) and (2.80). The fluid evolution equations (2.87)–(2.88) are a consequence of the Bianchi identities , . The Christoffel symbols associated with the purely angular degrees of freedom , may not vanish, but are not needed in the computations to follow, so we do not compute them. All the remaining non-vanishing Christoffel symbols are given by (Appendix A in [11])
| 3.867 |
| 3.868 |
| 3.869 |
By (2.90) we note that
| 3.870 |
We also observe that by (3.870) and (2.89)
| 3.871 |
where we recall the notation To express the Bianchi identities in coordinates, we use the formula
| 3.872 |
and the formulas (3.867)–(3.869). We start the with the p-equation and obtain from (1.2)
| 3.873 |
By (3.872) and (3.867)–(3.869) we have
| 3.874 |
| 3.875 |
| 3.876 |
where we have used (2.80) in the next-to-last line and (3.871) in the last. Similarly, we compute the -equation of the Bianchi identities (1.2).
| 3.877 |
By (3.872) and (3.867)–(3.869) we have just like above
| 3.878 |
| 3.879 |
Therefore, keeping in mind equations (3.873) and (3.877) can be rewritten in the form
| 3.880 |
| 3.881 |
which is equivalent to (2.87)–(2.88). From (2.89)–(2.90) and (2.82) we have the additional relationship
| 3.882 |
Double-Null Description of the RLP-Spacetime
Lemma A.1
The region to the past of the curve in the RLP spacetime is well-defined in the double-null coordinates, with the normalisation conditions (9.655)–(9.656).
Proof
Recalling the expressions (2.7) and (2.79), it is easy to see that
| 3.883 |
Using (3.883) we conclude that Recall that the 4-velocity in the comoving frame takes the form and therefore
| 3.884 |
It follows that solves the quadratic equation . Therefore
| 3.885 |
| 3.886 |
where the choice of signs in the solutions of the quadratic equations is consistent with the normalisation that is future pointing.
We now let along the outgoing geodesic through . By Lemma 8.8 we know that this curve asymptotes to in the plane, or equivalently, y converges to in the -plane. Recalling (2.21), (3.99)–(3.101), and (2.27), we see that as for some constant . Recall here that the density for . Observe that along the outgoing geodesic
| 3.887 |
for some -independent constant by an argument analogous to (8.614). Using the normalisation condition (9.656), we see that there exists a constant such that
| 3.888 |
Using the normalisation condition (9.656), equation (2.85) along the outgoing null-geodesic through takes the form
| 3.889 |
where we have used (2.82) and (2.82). Equivalently, after multiplying by and integrating, we obtain the formula
| 3.890 |
Note that by (2.19) . Since we know by Lemma 8.8 that as , , and thereby it follows by that there exists a constant independent of such that
We then use (3.888) to conclude that that the leading order asymptotic behaviour of the right-hand side of (3.890) is for some -independent constant . Therefore is well-defined and . Moreover, from (9.667) and (3.887), we have
| 3.891 |
It follows therefore, that along the outgoing geodesic . We can similarly use the normalisation condition (9.655) to determine along the ingoing geodesic through in the past of . Using (2.83)–(2.84), it is straightforward to show that the the solution exists everywhere in the past of with the asymptotic behaviour , , .
Data Availability
All data generated or analysed during this study are included in this published article.
Declarations
Conflict of Interests
The authors have no relevant financial or non-financial interests to disclose.
Footnotes
The LP- and Hunter-type solutions coincide at .
The nomenclature is motivated by their Newtonian analogue discovered by Larson [20] and Penston [31] in 1969, see [15] for the rigorous proof of existence of the Newtonian solution.
A geodesic is parametrised by an affine parameter if .
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Contributor Information
Yan Guo, Email: Yan_Guo@brown.edu.
Mahir Hadzic, Email: m.hadzic@ucl.ac.uk.
Juhi Jang, Email: juhijang@usc.edu.
References
- 1.Bondi H. Spherically symmetrical models in general relativity. Monthly Notices of the Royal Astronomical Society. 1947;107(5–6):410–425. doi: 10.1093/mnras/107.5-6.410. [DOI] [Google Scholar]
- 2.Carr BJ, Coley AA. Self-similarity in general relativity. Class. Quantum Grav. 1999;16:R31. doi: 10.1088/0264-9381/16/7/201. [DOI] [Google Scholar]
- 3.Carr BJ, Coley AA, Goliath M, Nilsson US, Uggla C. Critical phenomena and a new class of self-similar spherically symmetric perfect-fluid solutions. Phys. Rev. D. 2000;61(081502):1–5. [Google Scholar]
- 4.Carr BJ, Gundlach C. Spacetime structure of self-similar spherically symmetric perfect fluid solutions Phys. Rev. D. 2003;67:024035. doi: 10.1103/PhysRevD.67.024035. [DOI] [Google Scholar]
- 5.Christodoulou D. Violation of cosmic censorship in the gravitational collapse of a dust cloud. Commun. Math. Phys. 1984;93:171–195. doi: 10.1007/BF01223743. [DOI] [Google Scholar]
- 6.Christodoulou D. Examples of naked singularity formation in the gravitational collapse of a scalar field. Annals of Math. 1994;140:607–653. doi: 10.2307/2118619. [DOI] [Google Scholar]
- 7.Christodoulou, D., On the global initial value problem and the issue of singularities, Class. Quantum Grav., A 23 (1999)
- 8.Christodoulou D. The Instability of Naked Singularities in the Gravitational Collapse of a Scalar Field. Annals of Math. 1999;149(1):183–217. doi: 10.2307/121023. [DOI] [Google Scholar]
- 9.Dafermos MC. Spherically symmetric spacetimes with a trapped surface Class. Quantum Grav. 2005;22(11):2221–2232. doi: 10.1088/0264-9381/22/11/019. [DOI] [Google Scholar]
- 10.Dafermos, M. C., Luk, J., The interior of dynamical vacuum black holes I: The -stability of the Kerr Cauchy horizon. preprint,arXiv:1710.01722v1 (2017)
- 11.Dafermos MC, Rendall A. An extension principle for the Einstein-Vlasov system under spherical symmetry. Ann. Henri Poincare. 2005;6:1137–1155. doi: 10.1007/s00023-005-0235-7. [DOI] [Google Scholar]
- 12.Ehlers J, Kind S. Initial-boundary value problem for the spherically symmetric Einstein equations for a perfect fluid. Class. Quant. Grav. 1993;10:2123–2136. doi: 10.1088/0264-9381/10/10/020. [DOI] [Google Scholar]
- 13.Goliath M, Nilsson US, Uggla C. Timelike self-similar spherically symmetric perfect-fluid models. Class. Quantum Grav. 1998;15(9):2841–2863. doi: 10.1088/0264-9381/15/9/028. [DOI] [Google Scholar]
- 14.Gundlach, C., Martín-García, J.M., Critical Phenomena in Gravitational Collapse. Living Rev. Relativ.10, 5 (2007) 10.12942/lrr-2007-5 [DOI] [PMC free article] [PubMed]
- 15.Guo Y, Hadzic M, Jang J. Larson-Penston Self-similar Gravitational Collapse. Comm. Math. Phys. 2021;386:1551–1601. doi: 10.1007/s00220-021-04175-y. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 16.Guo Y, Hadzic M, Jang J, Schrecker M. Gravitational Collapse for Polytropic Gaseous Stars: Self-similar Solutions. Archive Rat. Mech. Anal. 2022;246:957–1066. doi: 10.1007/s00205-022-01827-8. [DOI] [Google Scholar]
- 17.Harada T. Final fate of the spherically symmetric collapse of a perfect fluid. Phys. Rev. D. 1998;58:104015. doi: 10.1103/PhysRevD.58.104015. [DOI] [Google Scholar]
- 18.Harada T, Maeda H. Convergence to a self-similar solution in general relativistic gravitational collapse. Phys. Rev. D. 2001;63:084022. doi: 10.1103/PhysRevD.63.084022. [DOI] [Google Scholar]
- 19.Joshi PS, Dwivedi IH. The structure of naked singularity in self-similar gravitational collapse. Comm. Math. Phys. 1992;146(2):333–342. doi: 10.1007/BF02102631. [DOI] [Google Scholar]
- 20.Larson RB. Numerical calculations of the dynamics of a collapsing protostar. Mon. Not. R. Astr. Soc. 1969;145:271–295. doi: 10.1093/mnras/145.3.271. [DOI] [Google Scholar]
- 21.Lemaître, G., L’Univers en expansion. Ann. Soc. Sci. Bruxelles, A 53, 51 (1933)
- 22.Merle F, Raphaël P, Rodnianski I, Szeftel J. On the implosion of a compressible fluid I: Smooth self-similar inviscid profiles. Ann. of Math. 2022;196:567–778. doi: 10.4007/annals.2022.196.2.3. [DOI] [Google Scholar]
- 23.Misner CW, Sharp DH. Relativistic equations for adiabatic, spherically symmetric gravitational collapse. Phys. Rev. 1964;136:B571–B576. doi: 10.1103/PhysRev.136.B571. [DOI] [Google Scholar]
- 24.Neilsen DW, Choptuik MW. Critical phenomena in perfect fluids. Classical Quantum Gravity. 2000;17:761–782. doi: 10.1088/0264-9381/17/4/303. [DOI] [Google Scholar]
- 25.Oppenheimer JR, Snyder H. On continued gravitational contraction. Phys. Rev. 1939;56:455–459. doi: 10.1103/PhysRev.56.455. [DOI] [Google Scholar]
- 26.Ori A, Piran T. Naked singularities in self-similar spherical gravitational collapse. Phys. Rev. Lett. 1987;59:2137. doi: 10.1103/PhysRevLett.59.2137. [DOI] [PubMed] [Google Scholar]
- 27.Ori A, Piran T. Self-similar spherical gravitational collapse and the cosmic censorship hypothesis. Gen. Relativ. Grav. 1988;20:7. doi: 10.1007/BF00759251. [DOI] [Google Scholar]
- 28.Ori A, Piran T. Naked singularities and other features of self-similar general-relativistic gravitational collapse. Phys. Rev. D. 1990;42:4. doi: 10.1103/PhysRevD.42.1068. [DOI] [PubMed] [Google Scholar]
- 29.Ortiz, N., Sarbach, O., Zannias, T., On the behaviour of non-radial null geodesics in self-similar Tolman-Bondi collapse. J. Phys. Conf. Ser., 1208 no.1, 012010 (2019)
- 30.Penrose R. Gravitational collapse: The role of general relativity. Riv. Nuovo Cim. 1969;1:252–276. [Google Scholar]
- 31.Penston MV. Dynamics of self-gravitating gaseous spheres III. Mon. Not. R. Astr. Soc. 1969;144:425–448. doi: 10.1093/mnras/144.4.425. [DOI] [Google Scholar]
- 32.Rodnianski, I., Shlapentokh-Rothman, Y., Naked Singularities for the Einstein Vacuum Equations: The Exterior Solution. preprint, arxiv:1912.08478 (2019)
- 33.Stanyukovich, K. P., Sharshekeev, O., Gurovich, V. Ts., Automodel motion of a relativistic gas in general relativity if there is point symmetry. Dokl. Akad. Nauk SSSR, 165, 3, 510–513 (1965)
- 34.Tolman, R.C.: Effect of inhomogeneity on cosmological models. Proc. Nat. Acad. Sci. U. S. 20, 169–176 (1934) [DOI] [PMC free article] [PubMed]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.
Data Availability Statement
All data generated or analysed during this study are included in this published article.