

Abstract
肾脏肿瘤已经成为威胁人类健康的重要疾病之一。超声检查具有普及率高、价格低廉、无辐射等诸多优点,已广泛应用于肾脏肿瘤的诊断中。超声图像中肾脏肿瘤的准确分割是制定治疗方案的基础。肾脏肿瘤往往生长在肾皮质中间,分割容易受到周围脏器干扰,而且超声图像对比度低、斑点噪声严重,使得肿瘤分割困难。本文根据肾脏超声图像的特点,提出基于自适应分区演化水平集(ASLSM)的肿瘤分割算法。首先,将感兴趣区域图像分区;然后,融合内外能量项和梯度设计目标函数,并自适应调整二者比例;最后,根据质心原理和零水平集内外相似度自适应卷积半径及曲率,进行曲线演化。将本算法用于肾脏超声图像,实验结果中豪斯多夫距离(HD)为(8.75 ± 4.21)mm,平均绝对距离(MAD)为(3.26 ± 1.69)mm,戴斯系数(DICE)为 0.93 ± 0.03。与传统的方法进行比较,实验结果证明本算法可以获得更加准确的肿瘤分割结果,今后本算法或可为辅助医生定位和诊断肾脏肿瘤提供便利。
Keywords: 超声图像, 肾脏肿瘤, 水平集, 自适应分区演化, 质心
Abstract
Kidney tumor is one of the diseases threatening human health. Ultrasound is widely applied in kidney tumor diagnosis due to its high popularization, low price and no radiation. Accurate segmentation of kidney tumor is the basis of precise treatment. Kidney tumors often grow in the middle of cortex, so that segmentation is easy disturbed by nearby organs. Besides, ultrasound images own low contrast and large speckle, leading to difficult segmentation. This paper proposed a novel kidney tumor segmentation method in ultrasound images using adaptive sub-regional evolution level set models (ASLSM). Regions of interest are firstly divided into subareas. Secondly, object function is designed by integrating inside and outside energy and gradient, in which the ratio of these two parts are adjusted adaptively. Thirdly, ASLSM adapts convolution radius and curvature according to centroid principle and similarity inside and outside zero level set. Hausdorff distance (HD) of (8.75 ± 4.21) mm, mean absolute distance (MAD) of (3.26 ± 1.69) mm, dice-coefficient (DICE) of 0.93 ± 0.03 were obtained in the experiment. Compared with traditional ultrasound segmentation method, ASLSM is more accurate in kidney tumor segmentation. ASLSM may offer convenience for doctor to locate and diagnose kidney tumor in the future.
Keywords: ultrasound image, kidney tumor, level set, adaptive sub-regional evolution, centroid
引言
肾脏肿瘤是人体泌尿系统常见肿瘤之一,患病率和死亡率约占肿瘤疾病的 3%[1]。肾脏肿瘤早期临床症状不明显,晚期可发展到血尿、腹部包块、疼痛,以致肾功能不全直至患者死亡,所以肾脏肿瘤的早期发现尤为重要[2]。超声造影以其价格低廉、无辐射、可动态观察瘤体情况等优势,已经广泛应用于肾脏肿瘤检查[3]。肾脏肿瘤可以根据其造影特征进行分类,以造影剂进入肾皮质和肿瘤的先后顺序、造影剂顶峰强度、坏死情况等特征,可区分透明细胞癌、乳头状细胞癌和嫌色细胞癌[4]。获取视频特征首先要在每帧分割出肿瘤与皮质,因此肿瘤的准确分割尤为关键。如图 1 所示为两幅典型肾脏超声图像,其中左列为两幅超声图像,右列为标注肿瘤和皮质位置的对应图像,白线内为肿瘤,红线和蓝线之间为皮质。
图 1.

Two typical ultrasound kidney images and location of tumor and cortex
两幅肾脏超声图像及其对应肿瘤和皮质图像
由于超声图像斑点噪声较大,加之肾脏肿瘤常位于肾脏皮质中间,对肿瘤分割造成很大的干扰。Caselles 等[5]提出了几何动态模型(geodesic active contours,GAC),使用梯度作为驱动项,仅能够分割出部分图像质量好的肿瘤图像。Li 等[6]提出保持水平集光滑的惩罚项算法,在距离正则化水平集演化模型(distance regularized level set evolution,DRLSE)上改进了惩罚项,取得了更好的效果。然而 DRLSE 仅用梯度驱动演化,当应用于噪声大的超声图像时,如图 1 所示的第一排图像,这一演化方式即无法跨越噪声而到达真正边界。在 2001 年,Chan 等[7]提出一种以 Chan 和 Vese 两人名字命名的 Chan-Vese(CV)模型,该方法基于轮廓内外全局能量最小的原则,具有较好的抗噪声能力,但是容易出现局部演化失败的问题。在 2008 年,Lankton 等[8]提出区域活动轮廓模型(localizing region-based active contours,LRBAC),其演化只考虑零水平集附近图像,该取值范围(下文简称:卷积半径)抗噪声能力较强。LRBAC 具有 CV 模型同样的缺陷,即易分裂成小曲线,且会因为卷积半径过大或者曲率过大所致曲线光滑而出现细节丢失问题,或因卷积半径过小,演化不到真正边界。在 2013 年,Zhang 等[9]根据扩散理论简化了零水平初始问题,避免初始化影响。在 2017 年,Khadidos 等[10]提出根据图像边界情况自适应演化速度模型,在边界模糊处减慢演化速度,而在边界清晰处加快演化速度。然而在肾脏分割中,文献[10]的方法没有比 LRBAC 和 DRLSE 取得更好效果,所以本文主要讨论 LRBAC 和 DRLSE。如图 1 所示的第二排肾脏肿瘤超声图像会出现有的区域肿瘤与皮质连在一起,内外相似度大(边界迷糊);有的区域内外相似度小(边界清晰);若用同一参数演化不同区域,将导致分割失败。
针对上述问题,本文提出了基于自适应分区演化水平集(adaptive sub-regional evolution level set models,ASLSM)的肾脏肿瘤分割算法。首先,将感兴趣(region of interest,ROI)划分为多个分区进行演化;然后,将局部内外能量与梯度相融合,以解决 DRLSE 梯度无法跨越大噪声区域,而 LRBAC 容易出现分裂成小曲线且获取细节能力差等缺点问题,并根据噪声自适应二者比值;其次,为解决 LRBAC 的卷积半径过大易丢失细节、过小则演化不到边界等问题,本文提出基于质心原理自适应卷积半径;最后,为解决 LRBAC 曲率过大使得曲线光滑丢失细节、过小则演化曲线跨越真正边界问题,本文提出基于零水平集内外相似度自适应曲率的解决办法,期望通过本文研究,能为临床肾脏肿瘤分割打开新的思路,取得较好的实用效果。
1. 方法
1.1. 水平集背景
水平集是一种将 n 维曲面投射成 n + 1 维空间曲面的演化算法。
(1)DRLSE 模型,是在 GAC 模型上加入了保持水平集光滑的惩罚项 L(Φ),其能量如式(1)所示:
 |
1 |
其中,η1,η2,κ1 为权重参数,εg 为曲线长度项,控制演化精度,如式(2)所示;εa 为轮廓内面积,控制演化速度,如式(3)所示:
 |
2 |
 |
3 |
其中,H1(Φ)是赫维赛德(Heaviside)函数,如式(4)所示,
 是 H1(Φ)求导所得,如式(5)所示;g 为图像梯度项,如式(6)所示。
是 H1(Φ)求导所得,如式(5)所示;g 为图像梯度项,如式(6)所示。
 |
4 |
其中,ϵ 为常量。
式(4)求导后如式(5)所示:
 |
5 |
其中,
 为常量。
为常量。
梯度项如式(6)所示:
 |
6 |
其中,Gσ 是以 σ 为方差的高斯函数。
惩罚项 L(Φ)如式(7)所示:
 |
7 |
(2)LRBAC 模型,引用 CV 模型的内外能量计算方式,并通卷积 B(x,y)区域改进算法。B(x,y)为零水平集附近所取范围区域,其卷积半径值定义为 convr(i),能量函数如式(8)所示:
 |
8 |
其中,|C|为曲线长度,ψ 为权重参数,εc 为内外能量项,如式(9)所示:
 |
9 |
其中,λ1、λ2 是内外能量的权重,H1(Φ)使用式(4)计算,Cin、Cout 为内和外能量项,计算方法如式(10)、式(11)所示:
 |
10 |
 |
11 |
其中
 为所取区域,H1(Φ)如式(4)所示。
为所取区域,H1(Φ)如式(4)所示。
1.2. 算法改进
ASLSM 融合内外能量与梯度,并自适应调整其比例,其能量函数如式(12)所示:
 |
12 |
其中,p(i)是第 i 区域 εg 与 εa 权重,分区标签如图 2 所示,ROI 被划分为 8 个区域,分区内图像噪声越大,p(i)值越大;εa 是轮廓内面积,增大 β,将会加速演化;
 是曲线长度,控制曲线光滑性,q(i)第 i 区域曲率权重。L(Φ)是惩罚项,如式(7)所示,H1(Φ)、δ1(Φ)分别如式(4)、式(5)所示。式(13)中 g 是梯度项,如式(6)所示,B(x,y)的卷积半径为 convr(i)。梯度下降法求的 EASLSM 导数如式(13)所示:
是曲线长度,控制曲线光滑性,q(i)第 i 区域曲率权重。L(Φ)是惩罚项,如式(7)所示,H1(Φ)、δ1(Φ)分别如式(4)、式(5)所示。式(13)中 g 是梯度项,如式(6)所示,B(x,y)的卷积半径为 convr(i)。梯度下降法求的 EASLSM 导数如式(13)所示:
图 2.

Sub-regional label and ROI
分区标签及 ROI 分区示意图
 |
13 |
演化函数 Phi 如式(14)所示,其中 Δt 为步长。
 |
14 |
1.2.1. 分区演化
为解决固定参数演化容易造成模糊区域分割失败等问题,本文提出了分区演化方法。如图 3 所示,为分区演化总图。
图 3.

Principle of sub-regional evolution
分区演化整体原理
首先本文从原始超声图像中的肿瘤边界选取 4 个点(红点),根据 4 个点最大长宽,获取 ROI,制作水平集演化函数 Phi;然后,制作 8 分区模板(每次演化只有一个区域为 1,其他区域为 0),依次与 ROI 和 Phi 相乘,并根据每个分区图像特征计算 p(i)、q(i)、convr(i),再将上述三个值代入式(14)演化后,得到一次迭代第一分区结果;最后将所有区域的结果合并,获得所有区域的演化函数 Phi,将其边界显示在 ROI 上,即为一次迭代 8 个分区的结果,其中红线为一次演化结果,完成一次分区演化。
根据每个分区图像特征计算 p(i)、q(i)和 convr(i),具体算法如图 4 所示。以计算第一分区参数为例,首先通过将 ROI 点乘 8 分区模板,将第一分区的图像取出如图 4 子图 a 所示;然后在第一分区图中零水平集(白细线)上等间隔取圆心,半径采样 r = 0.1∙K,其中 K 为 ROI 长和宽中最小值,取样图像如子图 a、b、c(只显示 3 个采样子图);最后根据采样子图 a、b、c 特征取平均值计算第一分区的 p(1)、q(1)、convr(1),具体算法请参照下文。
图 4.
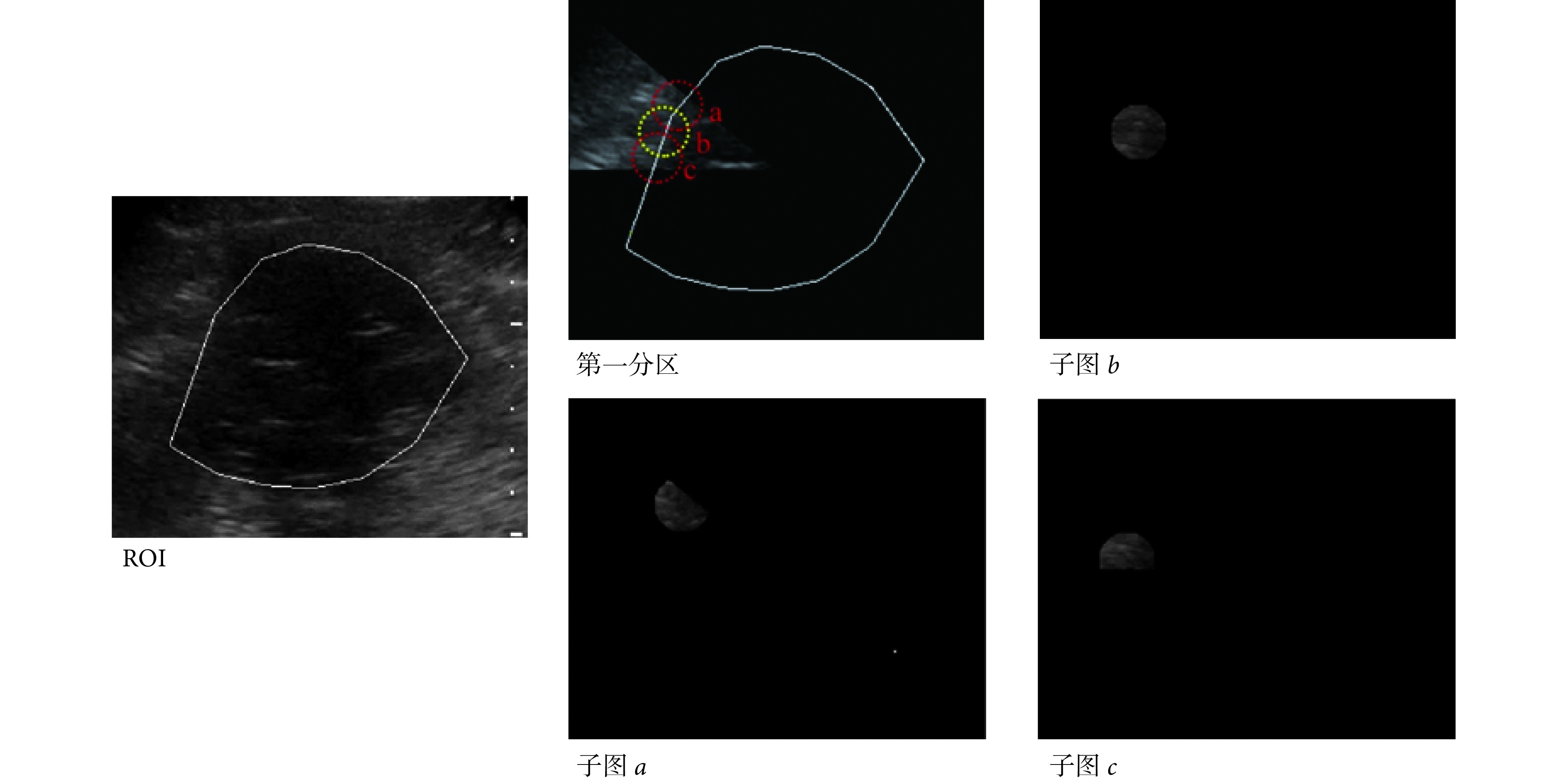
Principle of sub-region feature calculation
计算单个分区特征原理
1.2.2. p(i)值求法
为了解决 DRLSE 梯度无法跨越大噪声区域和 LRBAC 容易出现分裂小曲线且获取细节能力差的问题,本文提出将内外能量项与梯度相结合,并根据图像噪声自适应二者权重 p(i)的算法。如图 4 所示原理,本文在零水平集等间隔取圆心,以 r = 0.1∙K 为半径采样,其中 K 为 ROI 长和宽中最小值。如式(15)所示,本文首先计算分区采样子图的方差 var(Img(i,k)),然后计算分区所有采样子图方差的平均值,最后除以所有采样子图方差的最大值进行归一化。
 |
15 |
其中,var(Img(i,k))是第 i 区域的第 k 采样子图方差,
 是所有区域采样子图方差的最大值。
是所有区域采样子图方差的最大值。
作为例子,如图 5 所示,展示了 ROI 的 4 个区域采样子图,为便于展示如图 2 所示的 1~8 分区的噪声情况,取样半径大于图 4 设定的半径。右侧 4 幅子图为左侧原始超声图像中红色圆圈的截取图像,绿圈为零水平集初始轮廓。4 幅采样子图中,子图 d 噪声最大、方差最大、p(i)值最大;子图 b 噪声最小、方差最小、p(i)值最小。1~8 分区的 p(i)取值分别为:0.60、0.53、0.56、0.73、0.67、0.44、0.33、0.29。
图 5.
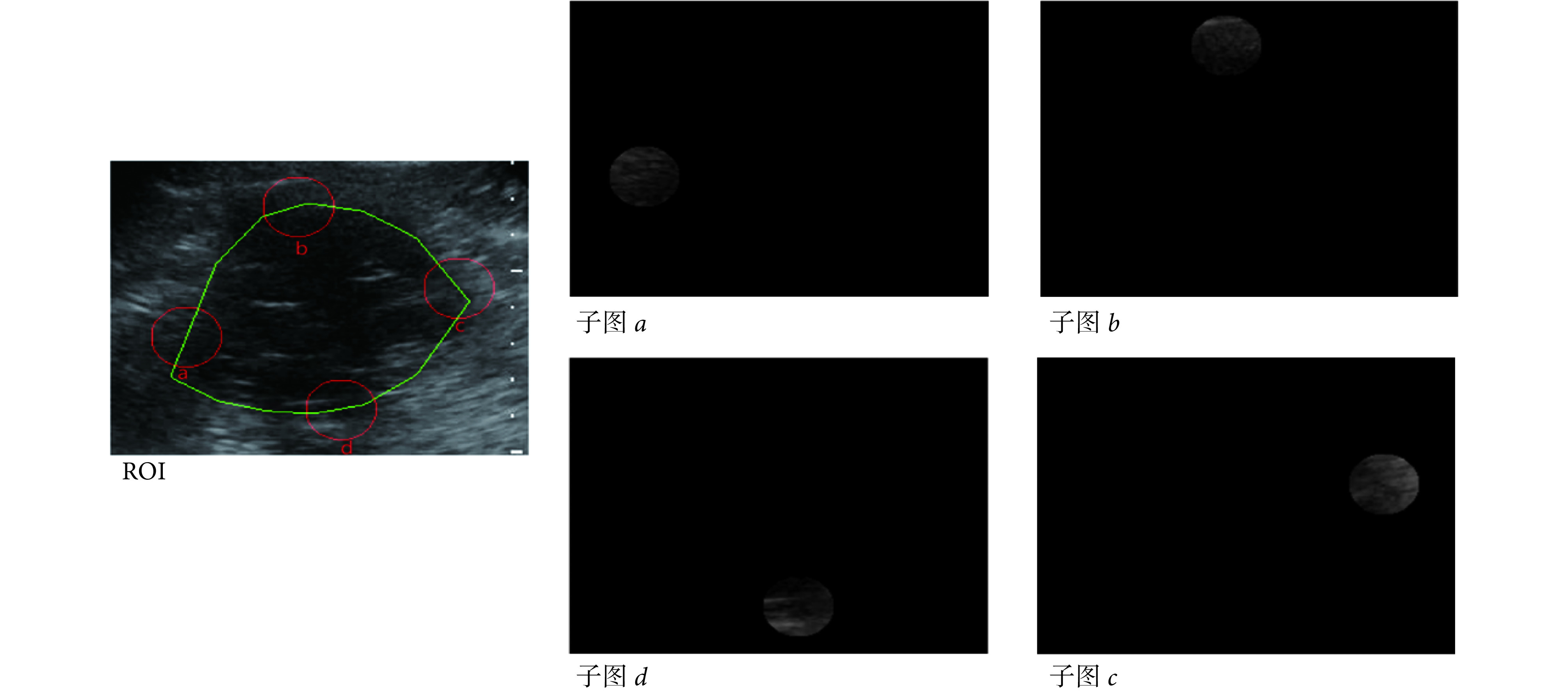
Noise calculation method according to variance
以方差定量不同区域噪声原理
1.2.3. 卷积半径 convr(i)求法
为解决 LRBAC 卷积半径过大则易丢失细节而过小则演化不到边界的问题,本文提出根据质心原理自适应卷积半径算法。为了便于理解,本文选取一个无噪声的模拟图演示卷积半径计算过程,如图 6 所示。首先在待分割图像原始模板图中任意取点,形成初始轮廓的零水平集曲线;然后求其梯度得到零水平集和真实梯度,其中细线为零水平集,粗线为真实梯度;最后在每个分区零水平集(细线)上等间隔取圆心,半径采样 r = 0.1∙K,其中 K 为 ROI 长和宽中最小值,计算该点(红色圆点)到最大梯度值点(红色叉点)最短距离,该距离即该分区的卷积半径,半径依次为 r1、r2、r3 和 r4,以蓝色线段显示。
图 6.
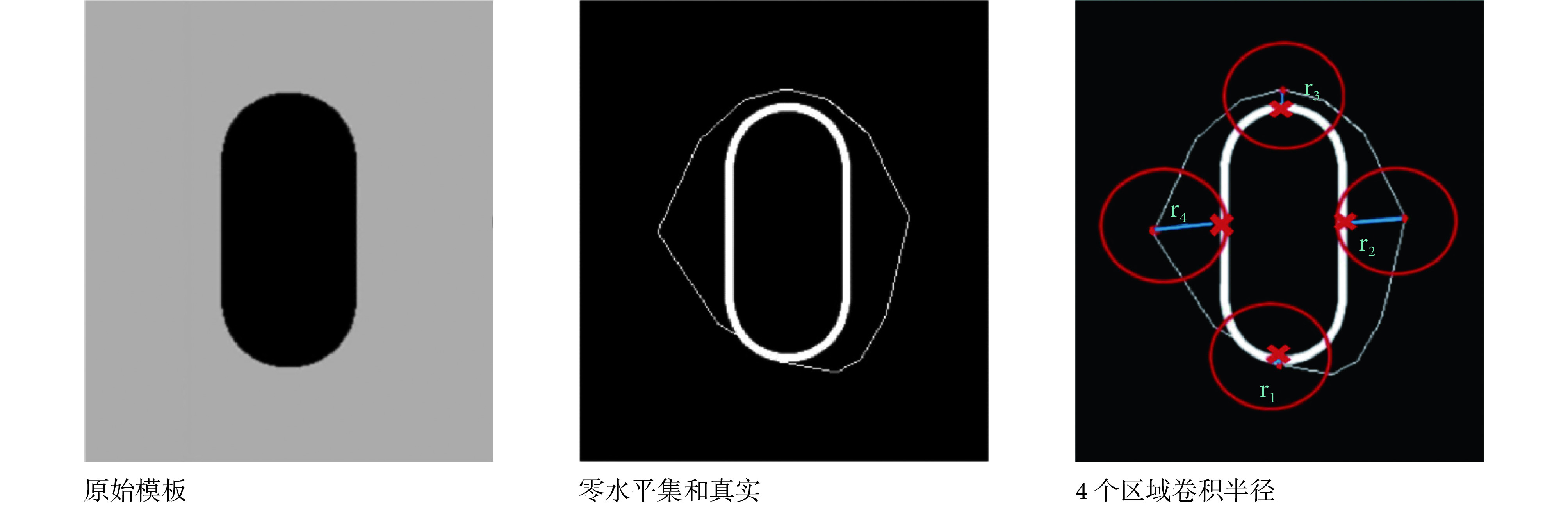
The model of convolution radius calculation
卷积半径计算原理模型
由于超声图像对比度低且斑点噪声大,在同一个区域内很难找到真实的边界梯度最大值点,故采用质心理论。如图 4 所示原理,本文在导数图像零水平集等间隔取圆心,以 r = 0.1∙K 为半径采样,其中 K 为 ROI 长和宽中最小值。首先计算每个采样子图质心如式(16)所示;然后求得质心到最近零水平集的最短距离的平均值,即该子图的卷积半径;最后计算分区内所有采样子图卷积半径平均值,即该分区的卷积半径 convr(i),如式(17)所示。
 |
16 |
 |
17 |
其中,(x,y)是质心坐标,(xk,yk)是第 i 分区第 k 个采样子图零水平集上离质心(x,y)最近的点。
如图 7 所示,本文将 ROI 求导后得到导数图像。红十字即为该采样子图质心,计算质心到零水平集(白线)的最短距离,即该采样子图的卷积半径,如放大子图中 r1、r2;再将分区子图卷积半径求平均值,即该分区的卷积半径 convr(i)。当边界非常模糊时,若无法获得质心位置,将所有其他区域卷积半径的平均值赋予这个区域。1~8 分区的 convr(i)取值分别为 4.21、7.23、6.19、13.90、21.34、9.45、10.43、3.82。
图 7.
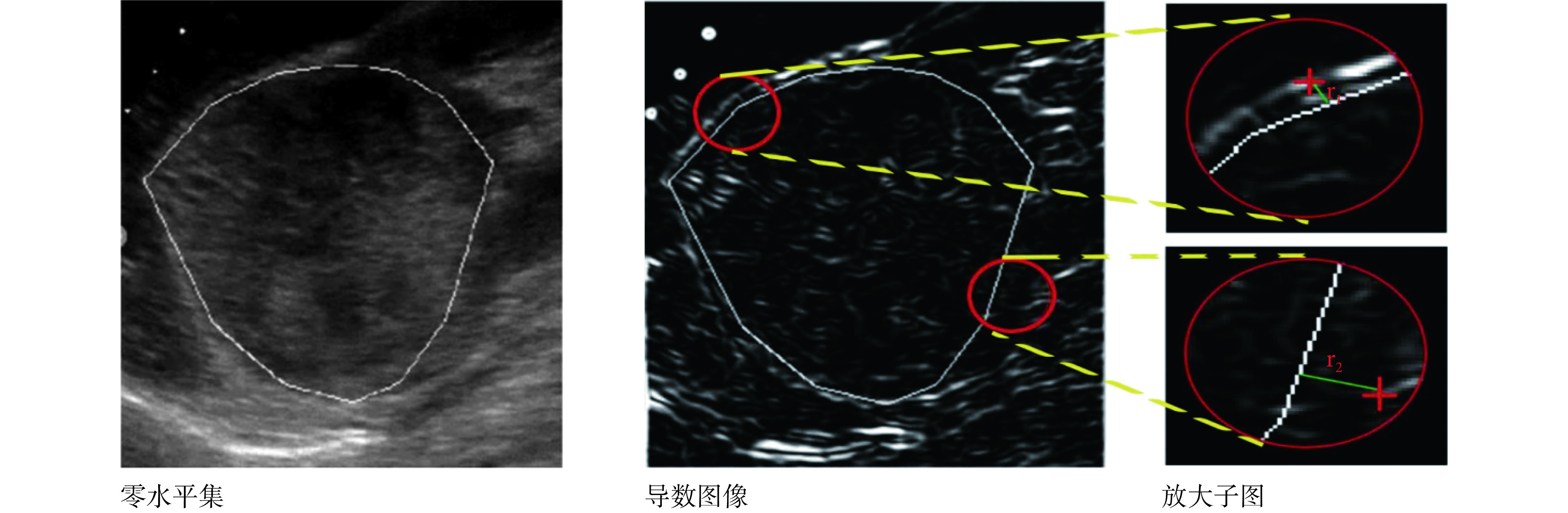
Principle of ultrasound image convolution radius calculation
超声卷积半径计算原理
1.2.4. 曲率权重 q(i)求法
为了解决 LRBAC 曲率过大曲线光滑而失去细节、曲率过小则内外相似度大区域跨越边界的问题,本文提出根据零水平集内外相似度自适应计算曲率的算法。如图 4 所示原理,首先在零水平集等间隔取圆心,r = 0.1∙K 为半径采样,其中 K 为 ROI 长和宽中最小值。采样子图内外的相似度 sim 的计算公式,如式(18)所示;分区中采样子图 sim 的平均值,即该值乘以相应的参数所得曲率权重 q(i)的计算公式,如式(19)所示:
 |
18 |
其中,D_min(i,k)为零水平集内外区域像素平均值较小值,D_max(i,k)则为较大值。
 |
19 |
其中,sim(i,k)是第 i 分区域第 k 个采样子图内外相似度,δ1、δ2 分别为 ROI 长和宽,这里 γ = 3。
如图 8 所示,零水平集为白线,4 区和 5 区中的绿圈为采样子图区域。4 区内外相似度最小,故 sim(4,k)值最小;5 区内外相似度最大,故 sim(5,k)值最大。本文自适应减小 4 区曲率获得更多细节,自适应增加 5 区曲率防止内外相似度大区域处跨越边界。1~8 分区的 sim(i)取值分别为 0.76、0.53、0.46、0.21、0.90、0.40、0.58、0.91。
图 8.

Principle of curvature calculation
曲率计算原理
2. 实验数据、评价指标及计算机配置
2.1. 实验数据
本文数据来自 2012 年 11 月—2016 年 11 月天津医科大学肿瘤医院,其中包括:肾脏肿瘤透明细胞癌视频 67 例、嫌色细胞癌 12 例、乳头细胞癌 8 例,共 87 例视频,所有试验均与患者签署知情同意书,并经过天津医科大学肿瘤医院授权使用该数据。所有患者年龄在 25~75 岁,详细信息如表 1 所示。每例视频分别选取造影剂刚进入时、最高峰时和退出时的 3 帧图像作为本文采样图像,共 261 幅超声图像,由临床医生手工勾勒作为金标准。
表 1. Statistics information of kidney tumor patients.
肾脏肿瘤患者统计信息
| 肿瘤类别 | 男性/人 | 女性/人 | 年龄/岁(均值 ± 标准差) |
| 透明细胞癌 | 47 | 20 | 54.61 ± 9.59 |
| 乳头状细胞癌 | 7 | 1 | 56.60 ± 9.12 |
| 嫌色细胞癌 | 5 | 7 | 50.12 ± 14.85 |
为了验证内外能量项融合梯度的效果,本文选取了一幅无噪声的模拟图像,并加入方差 σ = 0.03 的斑点噪声作为实验对象。
2.2. 量化指标
本文选择两轮廓豪斯多夫距离(hausdorff distance,HD)(符号记为:HD),平均绝对距离(mean absolute distance,MAD)(符号记为:MAD)和戴斯系数(dicecoefficient,DICE)(符号记为:DICE)作为评估标准。
假设 A、B 分别对应金标准和算法分割结果,HD 计算的是两个轮廓间的最大最小距离,如式(20)所示:
 |
20 |
其中,a 和 b 分别是两个轮廓 A 和轮廓 B 上的点,d(a,B)表示 a 到轮廓 B 的最短距离。
MAD 计算的是两个轮廓所有最小距离的平均值,如式(21)所示:
 |
21 |
其中,NA 和 NB 分别为轮廓 A 和轮廓 B 上的点的数量。
DICE 是评价两轮廓所在区域的重合程度,如式(22)所示:
 |
22 |
其中,ΩA 和 ΩB 分别表示以 A 和 B 为轮廓的闭区域,Area(.)为对应的闭区域的面积;DICE = 0 表示没有完全没有重合,分割完全错误;DICE = 1 表示两个闭合区域完全重合,分割完全正确。
2.3. 计算机硬软件配置
本文采用的计算机为戴尔工作站(T7920,Dell Inc,美国);使用的软件为 matlab 2018b(Matlab Inc,美国)。
3. 实验与结果
3.1. 融合内外能量项和梯度实验
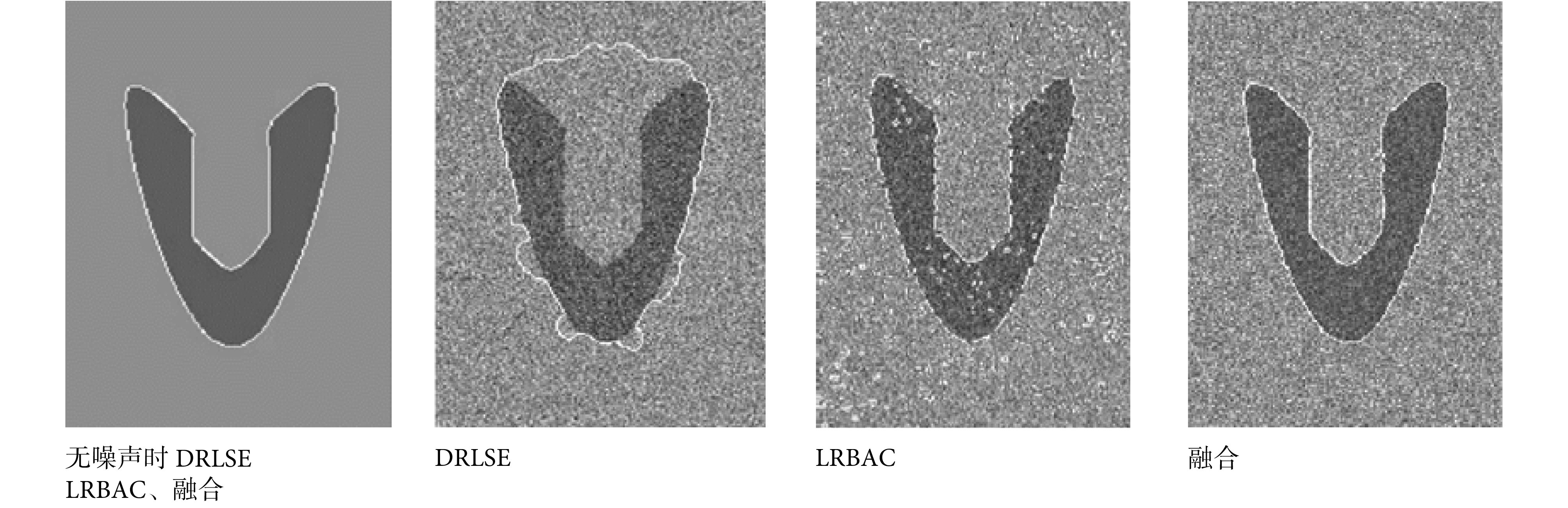
LRBAC 使用的内外能量项,拥有较强抵抗噪声的能力,但易分裂成小曲线,且当卷积半径过大的时,演化丢失细节;DRLSE 使用的梯度项能减少分裂小曲线的出现,获取更多的细节,但跨越大噪声区域能力较差。融合内外能量项和梯度,既拥有获取更强细节的能力,又不易分裂成小曲线。如图 9 所示,白线为演化结果,没有噪声时,DRLSE、LRBAC、融合项都能演化到真正边界;梯度无法跨越大噪声区域时,DRLSE 无法演化到真正的边界; LRBAC 模型整幅图出现很多分裂的小曲线,分割完全失败;而融合项能够演化到真正的边界,且没有出现分裂的小曲线。
图 9.
The experiment of integrating energy and gradient in simulation image
模拟图像融合内外能量项和梯度实验
3.2. 分区演化实验
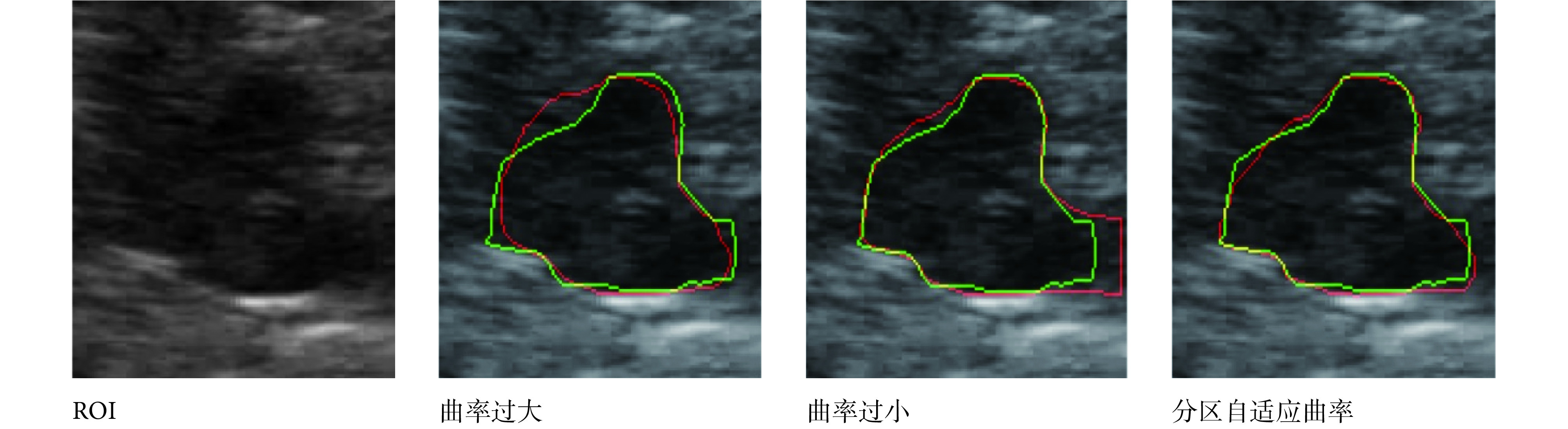
肾脏肿瘤图像在不同区域内外相似度不同,曲率过大演化曲线变的过于光滑而演化不到边界,曲率过小内外相似度大的区域演化易跨越边界。分区演化根据不同区域的噪声情况,在内外相似度大的区域增大曲率,在内外相似度小的区域减小曲率,可以分割出噪声较大的肾脏肿瘤图像。如图 10 所示,绿线为金标准,红线为分割结果。左二曲率设定 0.3∙δ1∙δ2 时,1 区和 2 区曲率过大而演化曲线变得光滑不能到边界,但 5 区能演化到真正边界;右二曲率设定为 0.1∙δ1∙δ2 时,5 区内外相似度大演化跨越边界;右一分区演化通过自适曲率在 1 区和 2 区减小曲率,5 区增大曲率,各区域均准确演化到边界。评价参数如表 2 所示,图 10 证明分区演化效果最好,对所有样本的分区演化实验结果如表 2 所示。
图 10.
Experiments on sub-region evolution
分区演化实验
表 2. Results of sub-region evolution.
分区演化实验结果
| 固定参数 | HD/mm | MAD/mm | DICE |
| 0.1∙δ1∙δ2 | 11.01 | 2.92 | 0.91 |
| 0.3∙δ1∙δ2 | 13.40 | 2.41 | 0.92 |
| 分区演化 | 8.36 | 1.74 | 0.95 |
3.3. 自适应 p(i)值实验
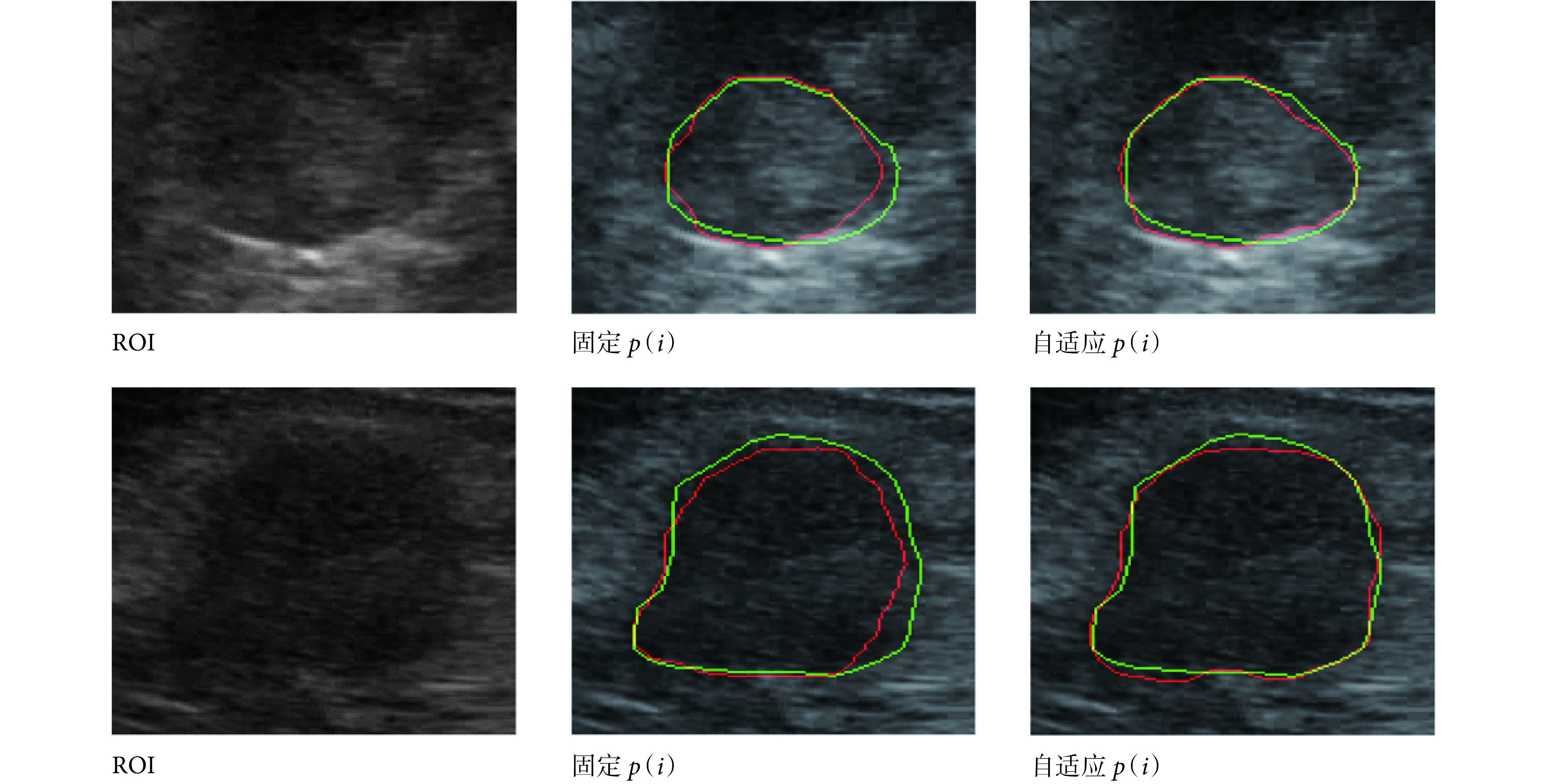
为了解决 DRLSE 梯度无法跨越大噪声区域和 LRBAC 容易出现分裂小曲线且获取细节能力差的问题,本文将内外能量项与梯度相融合,并自适应二者比值 p(i)。固定 q(i)值为 0.1∙δ1∙δ2 和 convr(i)值为 20,其中对照组 p(i)固定为 0.2,对所有的样本进行自适应 p(i)实验。实验结果如表 3 所示,自适应 p(i)值比固定 p(i)值效果有所提升,但梯度在肾脏超声图像中获取细节能力有限。如图 11 所示,绿线为金标准,红线为分割结果。其中,如固定 p(i)可见,第一排的 5 区、第二排的 5 区和 6 区域噪声较大,应增大该区 p(i)值,故固定 p(i)无演化到边界;而如果是选择自适应 p(i),则取得更准确的演化效果。
表 3. Results of adaptive p(i) .
自适应 p(i)值实验结果
| 方式 | HD/mm | MAD/mm | DICE |
| 固定 p(i) | 13.87 ± 5.91 | 4.12 ± 2.15 | 0.90 ± 0.04 |
| 自适应 p(i) | 12.22 ± 5.87 | 3.89 ± 1.97 | 0.91 ± 0.03 |
图 11.
Experiments on adaptive p(i)
自适应 p(i)值实验
3.4. 自适应卷积半径 convr(i)实验
根据质心原理,本文自适应卷积半径。在初始轮廓离真正边界较远的区域增大卷积半径,在初始轮廓离真正边界较近的区域减小卷积半径,增强获取细节的能力,驱动演化到真正边界。固定曲率 q(i)值为 0.1∙δ1∙δ2 和 p(i)值为 0.2,对照组 convr(i)固定为 20,进行自适应卷积半径实验。实验结果如表 4 所示,自适应 convr(i)效果有较大的提升,证明 convr(i)取值对肾脏超声图像分割尤其重要。如图 12 所示,绿线为金标准,红线为分割结果。左一列是肾脏肿瘤超声图像 ROI 区域;左二上在 1 区和 2 区卷积半径过大,5 区和 6 区卷积半径过小,演化不到边界,左二下的 4 区和 5 区卷积半径过小,演化不到边界;右一列自适应卷积半径 convr(i),取得更准确的演化效果。
表 4. Results of adaptive convolution radius experiment.
自适应卷积半径实验结果
| 方式 | HD/mm | MAD/mm | DICE |
| 固定 convr(i) | 13.87 ± 5.91 | 4.12 ± 2.15 | 0.90 ± 0.04 |
| 自适应 convr(i) | 10.82 ± 4.27 | 3.36 ± 1.72 | 0.92 ± 0.02 |
图 12.
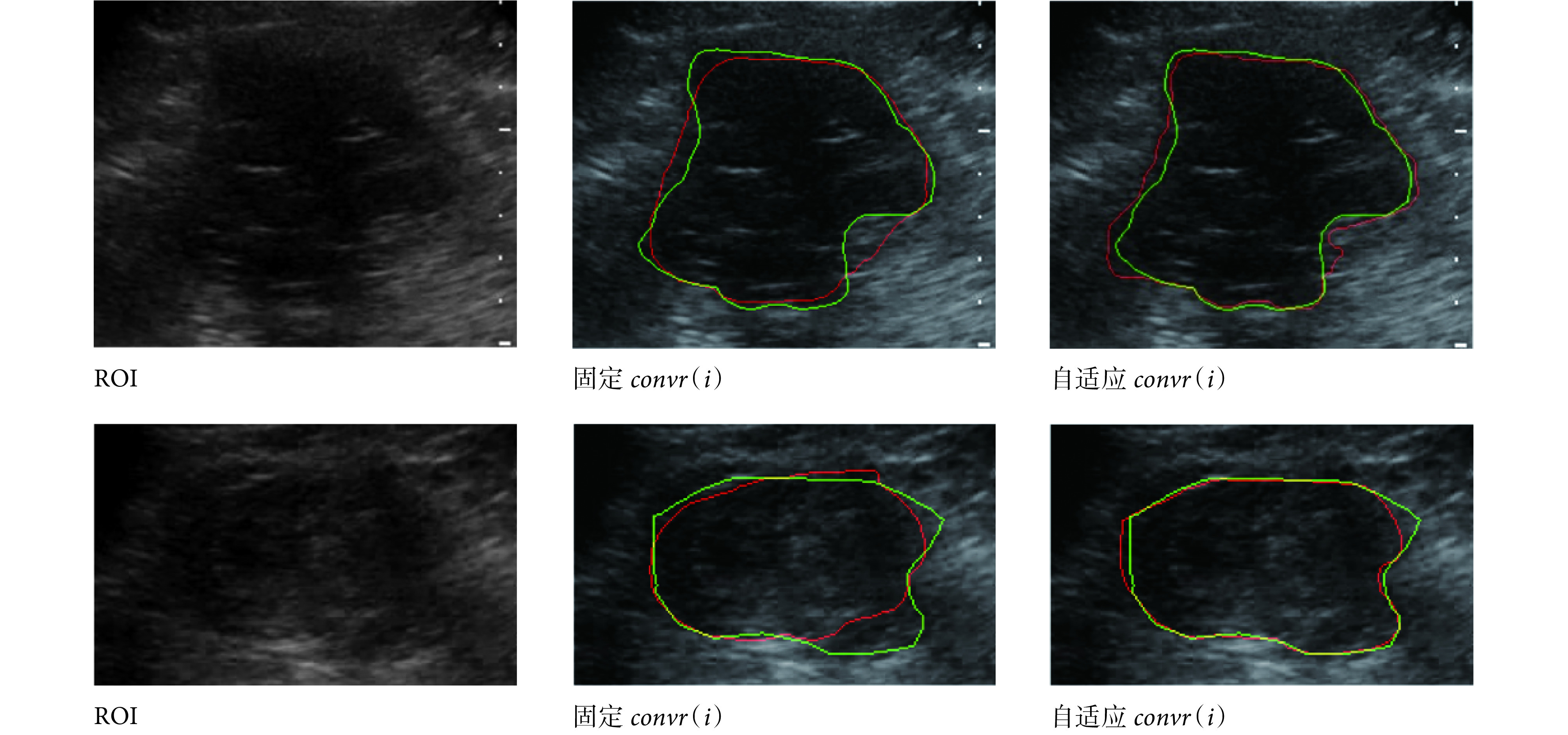
Experiments on adaptive convolution radius
自适应卷积半径实验
3.5. 自适应曲率 q(i)实验
本文根据零水平集内外相似度自适应曲率,在零水平集内外相似度大的区域增大曲率,在相似度小的区域减小曲率,使演化即在边界模糊处收敛住,又在边界清晰处获得更多细节。固定 convr(i)值为 20 和 p(i)值为 0.2,其中对照组 q(i)固定为 0.1∙δ1∙δ2,对所有的样本进行自适应曲率实验。如表 5 所示,自适应 q(i)效果有所提升。如图 13 所示,绿线为金标准,红线为分割结果。左二上的 2 区、左二下的 6 区内外相似度大,演化跨越真正边界;自适应增大了右一上的 2 区、右一下的 6 区曲率,结果显示二者均取得更准确的演化效果。
表 5. Results of adaptive curvature experiment.
自适应曲率实验结果
| 方式 | HD/mm | MAD/mm | DICE |
| 固定 q(i) | 13.87 ± 5.91 | 4.12 ± 2.13 | 0.90 ± 0.04 |
| 自适应 q(i) | 11.01 ± 4.90 | 3.65 ± 1.90 | 0.91 ± 0.03 |
图 13.
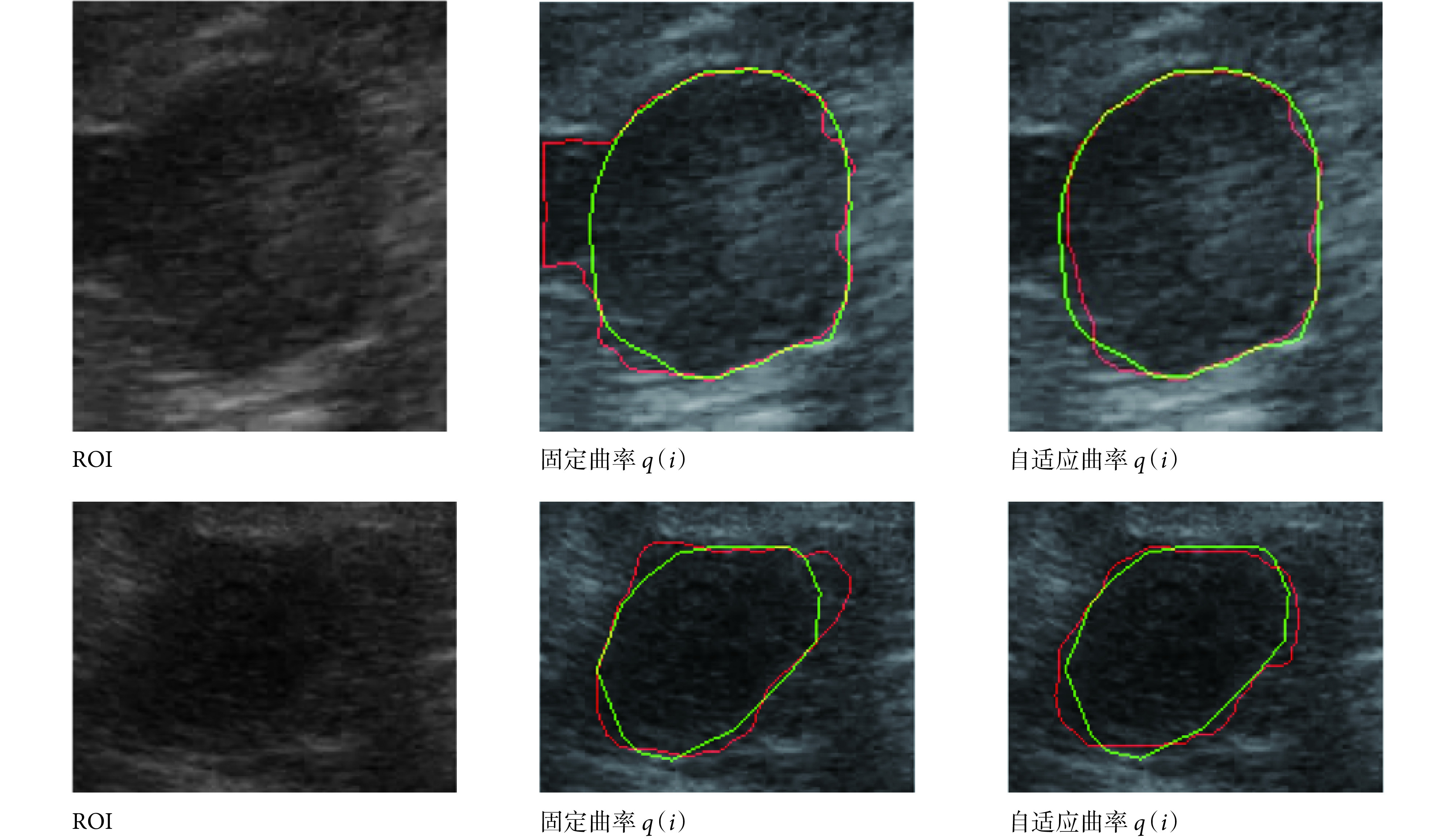
Adaptive curvature experiment
自适应曲率实验
3.6. 迭代次数实验
本文改变 ASLSM 迭代次数,并记录其 DICE 系数和运行时间,结果如图 14 所示,蓝线为 DICE 系数,棕线为时间。当迭代次数为 0~40 时,DICE 系数值快速提升。40~100 次时提升速度减缓,超过 100 次后,DICE 系数值基本保持不变,运行时间和迭代次数成正比。考虑到有效性和收敛性,故选取 100 次为最优迭代次数。
图 14.

Relation between iteration,DICE and running time
迭代次数与 DICE 系数和运行时间的关系
3.7. DRLSE、LRBAC、ASLSM 实验
DRLSE 仅使用梯度作为驱动项,跨越噪声能力差,LRBAC 卷积半径过大丢失细节,过小演化不到真正边界。ASLSM 通过自适应内外能量和梯度,获取细节能力明显增强。本实验分别使用 DRLSE、LRBAC、ASLSM 分割 261 幅超声图像,结果如表 6 所示。ASLSM 牺牲了一定运算时间,效果要明显好于 DRLSE、LRBAC。如图 15 所示,绿线为金标准,红线为分割结果。对应原始的肾脏肿瘤超声图像 ROI 区域;DRLSE 结果显示仅仅使用梯度特征,不能跨越大噪声区域演化到真正边界;LRBAC 则过于光滑难以获取细节,演化不到真正的边界,而 LRBAC 卷积半径过小演化不边界;但采用 ASLSM 自适应 p(i)、convr(i)、q(i),能更加准确演化到真正边界。
表 6. Results of three segmentation methods.
三种分割算法实验结果
| 理论 | HD/mm | MAD/mm | DICE | t/s |
| DRLSE | 16.94 ± 6.23 | 5.30 ± 2.54 | 0.88 ± 0.07 | 3.05 ± 1.23 |
| LRBAC | 14.96 ± 6.01 | 4.62 ± 2.30 | 0.89 ± 0.04 | 2.98 ± 0.99 |
| ASLSM | 8.75 ± 4.21 | 3.26 ± 1.69 | 0.93 ± 0.03 | 37.78 ± 5.89 |
图 15.
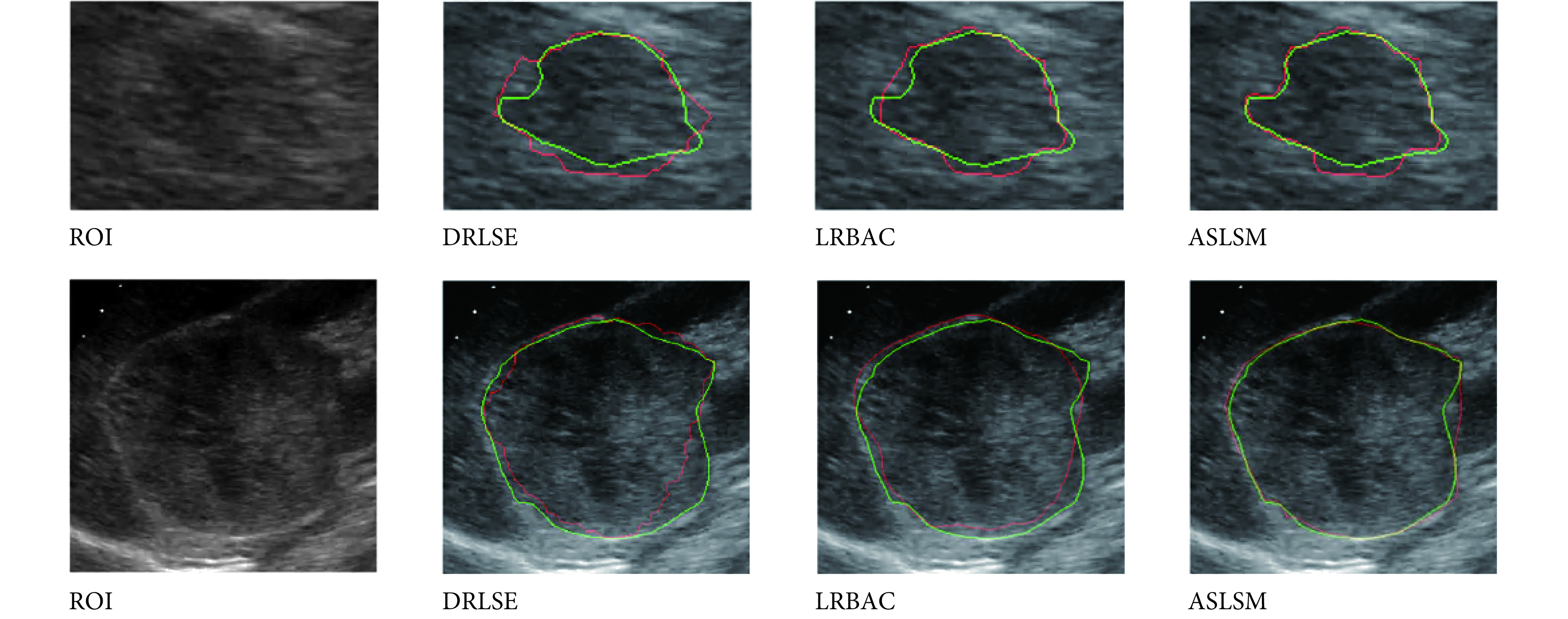
Experiment on three segmentation methods
三种分割算法实验
3.8. 算法讨论
LRBAC 卷积半径过小演化不到边界,卷积半径过大获取细节能力差,且容易出现分裂成小曲线,造成肾脏超声图像分割结果不理想。DRLSE 仅以梯度作为驱动演化项,对于斑点噪声较大的超声图像,同样分割效果不理想。本文算法融合内外能量项和梯度,弥补了 LRBAC 和 DRLSE 缺点并自适应权重,取得了较好分割效果,但是增加了运行时间。分区演化根据每个区域的图像特征,计算不同的演化参数,将不同区域的结果合成整个图像结果,导致运行时间有较大提升,今后本课题组将就此方面进行改进。
4. 结论与展望
本文根据肾脏肿瘤超声图像特点提出基于分区演化的水平集分割算法。该算法创新性地融合内外能量和梯度,提出了自适应二者能量、卷积半径和曲率算法,取得了较好的肿瘤分割效果,今后或可为医生确认肿瘤形态特征提供便利,为超声视频跟踪提取特征提供基础。基于现有问题,未来还可在如何更精确获得卷积半径、减少运行时间和如何根据单帧结果实现肾脏肿瘤视频跟踪三方面开展更深入的研究。
利益冲突声明:本文全体作者均声明不存在利益冲突。
Funding Statement
国家自然科学基金(61871135,81627804,81830058);上海市科委“科技创新行动计划”(18511102904)
Contributor Information
翌 郭 (Yi GUO), Email: guoyi@fudan.edu.cn.
源源 汪 (Yuanyuan WANG), Email: yywang@fudan.edu.cn.
References
- 1.李保国, 陆敏, 王国良, 等 619 例肾脏肿瘤的临床病理特征分析. 中国微创外科杂志. 2018;18(5):445–449. doi: 10.3969/j.issn.1009-6604.2018.05.016. [DOI] [Google Scholar]
- 2.张艳辉, 杨庆, 崔巍, 等 青年和中老年肾脏恶性肿瘤患者临床病理特点分析. 中华泌尿外科杂志. 2010;31(8):529–532. doi: 10.3760/cma.j.issn.1000-6702.2010.08.008. [DOI] [Google Scholar]
- 3.张雅 超声造影在肾脏肿瘤诊断及鉴别诊断中的应用研究进展. 影像研究与医学应用. 2018;2(18):50–51. doi: 10.3969/j.issn.2096-3807.2018.18.027. [DOI] [Google Scholar]
- 4.李钧, 周晓东, 罗二平, 等 实时超声造影诊断肾脏肿瘤的应用研究. 中国医学影像技术. 2006;22(4):591–593. doi: 10.3321/j.issn:1003-3289.2006.04.035. [DOI] [Google Scholar]
- 5.Caselles V, Kimmel R, Sapiro G Gedesic active contours. International Journal of Computer Vision. 1997;22(1):61–79. doi: 10.1023/A:1007979827043. [DOI] [Google Scholar]
- 6.Li Chunming, Xu Chenyang, Gui Changfeng, et al Distance regularized level set evolution and its application to image segmentation. IEEE Transactions on Image Processing. 2010;19(12):3243–3254. doi: 10.1109/TIP.2010.2069690. [DOI] [PubMed] [Google Scholar]
- 7.Chan T F, Vese L A Active contours without edge. IEEE Transactions on Image Processing. 2001;10(2):266–277. doi: 10.1109/83.902291. [DOI] [PubMed] [Google Scholar]
- 8.Lankton S, Tannenbaum A Localizing region-based active contours. IEEE Transactions on Image Processing. 2008;17(11):2029–2039. doi: 10.1109/TIP.2008.2004611. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 9.Zhang Kaihua, Zhang Lei, Song Huihui, et al Reinitialization-free level set evolution via reaction diffusion. IEEE Transactions on Image Processing. 2013;22(1):258–271. doi: 10.1109/TIP.2012.2214046. [DOI] [PubMed] [Google Scholar]
- 10.Khadidos A, Sanchez V, Li C T, et al Weighted level set evolution based on local edge features for medic image segmentation. IEEE Transactions on Image Processing. 2017;26(4):1979–1991. doi: 10.1109/TIP.2017.2666042. [DOI] [PubMed] [Google Scholar]