

Abstract
Gamma distributed delay differential equations (DDEs) arise naturally in many modelling applications. However, appropriate numerical methods for generic gamma distributed DDEs have not previously been implemented. Modellers have therefore resorted to approximating the gamma distribution with an Erlang distribution and using the linear chain technique to derive an equivalent system of ordinary differential equations (ODEs). In this work, we address the lack of appropriate numerical tools for gamma distributed DDEs in two ways. First, we develop a functional continuous Runge–Kutta (FCRK) method to numerically integrate the gamma distributed DDE without resorting to Erlang approximation. We prove the fourth-order convergence of the FCRK method and perform numerical tests to demonstrate the accuracy of the new numerical method. Nevertheless, FCRK methods for infinite delay DDEs are not widely available in existing scientific software packages. As an alternative approach to solving gamma distributed DDEs, we also derive a hypoexponential approximation of the gamma distributed DDE. This hypoexponential approach is a more accurate approximation of the true gamma distributed DDE than the common Erlang approximation but, like the Erlang approximation, can be formulated as a system of ODEs and solved numerically using standard ODE software. Using our FCRK method to provide reference solutions, we show that the common Erlang approximation may produce solutions that are qualitatively different from the underlying gamma distributed DDE. However, the proposed hypoexponential approximations do not have this limitation. Finally, we apply our hypoexponential approximations to perform statistical inference on synthetic epidemiological data to illustrate the utility of the hypoexponential approximation.
Keywords: infinite delay equation, functional continuous Runge–Kutta methods, delay differential equations, linear chain trick
1. Introduction
Gamma distributed delay differential equations (DDEs), generically of the form
 |
(1.1) |
have been extensively used in mathematical biology, epidemiology and pharmacometric modelling (Andò et al., 2020; Câmara De Souza et al., 2018; Cassidy, 2021; Champredon et al., 2018; Hu et al., 2018; Hurtado & Kirosingh, 2019; Smith, 2011). These models describe the influence of the past on the current state through the convolution integral
 |
where  is the probability density function (PDF) of the gamma distribution. The initial value problem (1.1) is equipped with initial data in the form of the history function
is the probability density function (PDF) of the gamma distribution. The initial value problem (1.1) is equipped with initial data in the form of the history function  . Typically,
. Typically,  , where
, where  is a probability measure (Hale & Verduyn Lunel, 1993). The Radon–Nikodym derivative of
is a probability measure (Hale & Verduyn Lunel, 1993). The Radon–Nikodym derivative of  with respect to Lebesgue measure is the PDF
with respect to Lebesgue measure is the PDF  given by
given by
 |
which is parameterized using the shape and scale parameters,  and
and  , respectively. While both these parameters can be positive reals, many authors, when considering applications, artificially restrict
, respectively. While both these parameters can be positive reals, many authors, when considering applications, artificially restrict  to integer values and (1.1) is thus an Erlang distributed DDE. This restriction is useful as these Erlang distributed DDEs can then be reduced to an equivalent system of ordinary differential equations (ODEs) through the linear chain technique (MacDonald, 1978; Vogel, 1961). A major impediment to the implementation of the more general gamma distributed DDE is the lack of appropriate numerical techniques for their simulation (Breda et al., 2016; Diekmann et al., 2018, 2020b). Here, we address this impediment in two distinct manners, first, by implementing a functional continuous Runge–Kutta (FCRK) method to simulate (1.1) and, second, by deriving a finite dimensional approximation of (1.1) that is more accurate than the common Erlang approximation.
to integer values and (1.1) is thus an Erlang distributed DDE. This restriction is useful as these Erlang distributed DDEs can then be reduced to an equivalent system of ordinary differential equations (ODEs) through the linear chain technique (MacDonald, 1978; Vogel, 1961). A major impediment to the implementation of the more general gamma distributed DDE is the lack of appropriate numerical techniques for their simulation (Breda et al., 2016; Diekmann et al., 2018, 2020b). Here, we address this impediment in two distinct manners, first, by implementing a functional continuous Runge–Kutta (FCRK) method to simulate (1.1) and, second, by deriving a finite dimensional approximation of (1.1) that is more accurate than the common Erlang approximation.
Currently, existing numerical tools for the simulation and study of DDEs with finite delays, such as the continuous Runge–Kutta methods described in Bellen et al. (2009) and implemented in major software packages, often perform poorly when the minimal delay is smaller than the numerical solution step-size, a phenomena termed ‘overlapping’. Since the minimal delay in the Gamma-distributed DDE (1.1) is zero, this class of DDEs always exhibits overlapping. FCRK methods naturally and efficiently deal with overlapping, but although they were first proposed in the 1970s (Maset et al., 2005; Tavernini, 1971), they still have not been widely implemented in software packages nor extended to the infinite delay case. In fact, numerical tools for problems with infinite delay have only recently started to be developed. Recent work for problems with infinite delay includes pseudo-spectral techniques (Diekmann et al., 2020b; Gyllenberg et al., 2018), and the development of ODE approximations of the gamma-distributed DDE without enforcing  (Koch & Schropp, 2015; Krzyzanski, 2019). Krzyzanski (2019) used the binomial theorem to develop an ODE approximation of a generic gamma distributed DDE. However, this approximation relies on truncating the infinite series expansion of the PDF of the gamma distribution at some finite value. While Krzyzanski (2019) does derive explicit error bounds dependent on the number of terms
(Koch & Schropp, 2015; Krzyzanski, 2019). Krzyzanski (2019) used the binomial theorem to develop an ODE approximation of a generic gamma distributed DDE. However, this approximation relies on truncating the infinite series expansion of the PDF of the gamma distribution at some finite value. While Krzyzanski (2019) does derive explicit error bounds dependent on the number of terms  in the series expansion, the artificial truncation of the convolution integral ensures that the numerical approximation is not consistent. In a related work focused on lifespan distributions, Koch & Schropp (2015) impose a fixed upper bound for the lifespan duration, then subdivide the interval of possible lifespan durations into
in the series expansion, the artificial truncation of the convolution integral ensures that the numerical approximation is not consistent. In a related work focused on lifespan distributions, Koch & Schropp (2015) impose a fixed upper bound for the lifespan duration, then subdivide the interval of possible lifespan durations into  sub-compartments. The populations in each sub-compartment are weighted according to the probability of a lifespan of that length when calculating the total population size. Once again, this method requires the modeller to determine a fixed upper bound of the lifespan duration and does not capture the full dynamics of the infinite delay DDE. The FCRK method developed in this work explicitly computes the improper convolution integral and eliminates the requirement that modellers impose artificial upper bounds when simulating (1.1). To our knowledge, the FCRK method developed in this work is the first numerical method that does not artificially truncate the infinite delay by imposing artificial bounds. Consequently, the FCRK method derived here is the first consistent numerical method for DDEs with infinite delay; while we focus on gamma distributed DDEs, our method should be straightforward to adapt to other distributed DDEs where the integrand in the convolution integral decays exponentially.
sub-compartments. The populations in each sub-compartment are weighted according to the probability of a lifespan of that length when calculating the total population size. Once again, this method requires the modeller to determine a fixed upper bound of the lifespan duration and does not capture the full dynamics of the infinite delay DDE. The FCRK method developed in this work explicitly computes the improper convolution integral and eliminates the requirement that modellers impose artificial upper bounds when simulating (1.1). To our knowledge, the FCRK method developed in this work is the first numerical method that does not artificially truncate the infinite delay by imposing artificial bounds. Consequently, the FCRK method derived here is the first consistent numerical method for DDEs with infinite delay; while we focus on gamma distributed DDEs, our method should be straightforward to adapt to other distributed DDEs where the integrand in the convolution integral decays exponentially.
The main difficulty in applying FCRK methods to infinite delay problems is the evaluation of the semi-infinite convolution integral. Our main new contribution to FCRK methods is to demonstrate how to do this both accurately and efficiently. To achieve this, we derive a novel change of variable to map the semi-infinite domain of integration to a compact interval. While many changes of variables exist to map semi-infinite to compact domains of integration, our approach is derived to conserve sufficient regularity and therefore ensure the accuracy of our numerical method. In particular, we derive explicit conditions to ensure sufficient regularity of the transformed integrand that depend only on the parameters of the PDF  . Then, existing composite Newton–Cotes methods are utilized to numerically calculate the transformed convolution integral and thus efficiently evaluate the right-hand side of (1.1). To ensure the accuracy of the FCRK method, we derive order conditions on the quadrature method which allow us to evaluate the integrals just sufficiently accurately to maintain the global order of the FCRK method. In particular, we establish an explicit relationship between the stepsize of the FCRK method and the stepsize of the quadrature method. We prove the fourth-order convergence of our FCRK method in Theorem 2.1 and Appendix C and demonstrate the accuracy of our FCRK method through a number of examples in Section 4.1.
. Then, existing composite Newton–Cotes methods are utilized to numerically calculate the transformed convolution integral and thus efficiently evaluate the right-hand side of (1.1). To ensure the accuracy of the FCRK method, we derive order conditions on the quadrature method which allow us to evaluate the integrals just sufficiently accurately to maintain the global order of the FCRK method. In particular, we establish an explicit relationship between the stepsize of the FCRK method and the stepsize of the quadrature method. We prove the fourth-order convergence of our FCRK method in Theorem 2.1 and Appendix C and demonstrate the accuracy of our FCRK method through a number of examples in Section 4.1.
Inspired by the lack of readily available appropriate numerical methods for problems such as (1.1), there has also been considerable interest in approximating infinite delay DDEs by forms that are more convenient for simulation (Cassidy et al., 2019; Diekmann et al., 2018, 2020a; Hurtado & Kirosingh, 2019; Koch & Schropp, 2015; Krzyzanski, 2019). The most well-known of these is the previously mentioned linear chain technique, wherein modellers often make the simplifying assumption that  when implementing gamma distributed DDE models. We refer to this assumption as the Erlang approximation. However, this assumption imposes constraints on the sample mean and variance of the delayed process. Typically, for a general gamma-distributed random variable with mean
when implementing gamma distributed DDE models. We refer to this assumption as the Erlang approximation. However, this assumption imposes constraints on the sample mean and variance of the delayed process. Typically, for a general gamma-distributed random variable with mean  and variance
and variance  , modellers impose
, modellers impose  , where
, where  rounds
rounds  to the nearest integer with
to the nearest integer with  (Cassidy & Craig, 2019; Jenner et al., 2021). As a result, it is only possible to fit one of these statistics with an Erlang distribution, as the system
(Cassidy & Craig, 2019; Jenner et al., 2021). As a result, it is only possible to fit one of these statistics with an Erlang distribution, as the system
 |
only admits a solution if  which corresponds to
which corresponds to 
In light of this limitation of the Erlang approximation, recent work has explored using phase type distributions to approximate generic distributed DDEs. These phase-type distributed DDEs are then reduced to a system of ODEs through a variant of the linear chain technique (Cassidy, 2021; Hurtado & Richards, 2020; Hurtado & Kirosingh, 2019). These phase-type distributions approximate the underlying distribution either by minimizing some distance measurement between distributions or by matching moments of the underlying distribution. We take the latter approach when developing a novel hypoexponential approximation of the generic gamma distributed DDE (1.1). Existing work has identified the ‘reachable’ bounds in moment space and the minimal number of phases required to match the first three moments of the underlying distribution using phase type distributions (Bobbio et al., 2005; Johnson & Taaffe, 1989, 1990). However, in general, it may not be possible to match the first three moments, and even if it is possible, the required number of phases can be arbitrarily high (Osogami & Harchol-Balter, 2006). In fact, we prove in Theorem 3.3 that it is not possible to match three or more moments of a generic gamma distribution using purely hypoexponential distributions. Accordingly, we only match the first two moments of the underlying gamma distribution. We match the first two moments without imposing any restrictions on their values, and the parameters of our approximating phase-type distribution are entirely determined by the mean and variance of the underlying distribution. Moreover, our approximation is exact if the underlying distribution is Erlang.
To achieve this two moment matching, we derive explicit rates of the hypoexponential approximation to match the first two moments of a given gamma distribution and then derive the equivalent system of ODEs. These ODE models are simple to study numerically and have the added benefit of being easy to implement in scientific software packages and explain for scientific collaborators. Furthermore, we leverage our FCRK method to simulate (1.1) and thus explicitly evaluate the accuracy of our hypoexponential approximation by comparison against solutions obtained from our FCRK method, which has not been done in prior work. As we will show, our approximation more accurately captures the dynamics of the underlying gamma distributed DDE than the Erlang approximation obtained by setting  while being as simple to implement in existing scientific software as the common Erlang approximation.
while being as simple to implement in existing scientific software as the common Erlang approximation.
Finally, we apply our hypoexponential approximation to the problem of statistical inference. Erlang delay models are often used in epidemiology of infectious diseases (Champredon et al., 2018; Greenhalgh & Rozins, 2021; Rozhnova et al., 2021; Sanche et al., 2020) but also in many other fields (Câmara De Souza et al., 2018; Cassidy, 2021; Cassidy & Humphries, 2019; Gossel et al., 2017). A common approach is to define an epidemiological model in terms of ODEs and estimate parameters by fitting the model to disease incidence data. One key parameter, the basic reproduction number  , is closely related to the generation interval (or it is proxy the serial interval), the initial exponential growth rate of the epidemic and time to recovery
, is closely related to the generation interval (or it is proxy the serial interval), the initial exponential growth rate of the epidemic and time to recovery  (Roberts & Heesterbeek, 2007). This relationship depends not only on the mean infectious period
(Roberts & Heesterbeek, 2007). This relationship depends not only on the mean infectious period  but also on the distribution of this period. Therefore, making invalid assumptions about this distribution can lead to spurious estimates of, e.g.,
but also on the distribution of this period. Therefore, making invalid assumptions about this distribution can lead to spurious estimates of, e.g.,  and the corresponding critical vaccination coverage. The same argument holds for other intervals with randomly distributed durations such as the duration of the period that an individual has been exposed, but is not yet infectious (
and the corresponding critical vaccination coverage. The same argument holds for other intervals with randomly distributed durations such as the duration of the period that an individual has been exposed, but is not yet infectious ( ).
).
In practice, the random times  and
and  are often assumed to be
are often assumed to be  -distributed so that the DDEs can simply be implemented as ODEs using the linear chain technique. This is convenient because ODE models are easy to implement in commonly used software packages for statistical inference (Carpenter et al., 2017), whereas support for DDE models is much less common and often restricted to an Erlang distributed or fixed delays (Lixoft, 2019; Raue et al., 2014, 2009). Apart from convenience, there is no reason to assume that the distributions of
-distributed so that the DDEs can simply be implemented as ODEs using the linear chain technique. This is convenient because ODE models are easy to implement in commonly used software packages for statistical inference (Carpenter et al., 2017), whereas support for DDE models is much less common and often restricted to an Erlang distributed or fixed delays (Lixoft, 2019; Raue et al., 2014, 2009). Apart from convenience, there is no reason to assume that the distributions of  and
and  should be
should be  instead of gamma distributions. The hypoexponential approximation of the gamma distribution proposed here still allows for an ODE approximation of the DDE model but removes the need to assume that the shape
instead of gamma distributions. The hypoexponential approximation of the gamma distribution proposed here still allows for an ODE approximation of the DDE model but removes the need to assume that the shape  parameter is an integer.
parameter is an integer.
Another purely practical reason for using the hypoexponential approximation of the gamma distribution instead of an  distribution is that estimating the integer shape parameter
distribution is that estimating the integer shape parameter  of the Erlang distribution can be inconvenient in some software packages. For instance, in the commonly used package for Bayesian inference Stan (Carpenter et al., 2017), the estimated parameters have to be real-valued due to the limitations imposed by the Hamiltonian Monte-Carlo method. Accordingly, to estimate an integer valued
of the Erlang distribution can be inconvenient in some software packages. For instance, in the commonly used package for Bayesian inference Stan (Carpenter et al., 2017), the estimated parameters have to be real-valued due to the limitations imposed by the Hamiltonian Monte-Carlo method. Accordingly, to estimate an integer valued  , modellers must repeat the analysis for multiple fixed values of
, modellers must repeat the analysis for multiple fixed values of  and compare the results with Bayes factors or information criteria as LOO-IC or WAIC (Vehtari et al., 2017). This extra step, and the resulting extra computation, can be avoided if
and compare the results with Bayes factors or information criteria as LOO-IC or WAIC (Vehtari et al., 2017). This extra step, and the resulting extra computation, can be avoided if  is allowed to be real-valued and estimated by the software package, as when using either the FCRK method or the approximation derived in this work. However, updating existing scientific software to use our FCRK method would be much more time-consuming than using our hypoexponential approximation. Consequently, we implement the hypoexponential approximation in Stan and use the resulting ODE system for statistical inference of epidemiological parameters and evidence synthesis, thus illustrating a simple application of the hypoexponential approximation derived in this work.
is allowed to be real-valued and estimated by the software package, as when using either the FCRK method or the approximation derived in this work. However, updating existing scientific software to use our FCRK method would be much more time-consuming than using our hypoexponential approximation. Consequently, we implement the hypoexponential approximation in Stan and use the resulting ODE system for statistical inference of epidemiological parameters and evidence synthesis, thus illustrating a simple application of the hypoexponential approximation derived in this work.
The remainder of the article is structured as follows. We begin by developing a numerical method to simulate the general gamma distributed DDE by using the theory of FCRK methods to address overlapping in the convolution integral in Section 2. We then give sufficient conditions to ensure that our evaluation of the semi-infinite convolution integral conserves the accuracy of the underlying FCRK method by proving the convergence of our method in Section 2.1.1 and Appendix C. Next, in Section 3, we develop our hypoexponential approximation by considering a more generic concatenation of exponentially distributed waiting times than the Erlang distribution and allowing for the rate parameters to vary between compartments. In Section 3.2, we derive explicit expressions of these rates that replicate the first and second moments of the gamma distribution in (1.1). Turning to numerical results, we confirm that the FCRK method derived in Section 2 performs to the proven accuracy in Section 4.1. Then, by leveraging the numerical simulation of the gamma distributed DDE (1.1), we show that the hypoexponential approximation outperforms the common Erlang approximation of the underlying gamma-distributed DDE in Section 4.2. The comparison between the Erlang and hypoexponential approximations against the true solution of the distributed DDE obtained via our FCRK method has not been performed previously. As the most striking illustration, we show in Section 4.2.1 that the Erlang-distributed DDE does not necessarily replicate the qualitative properties of the underlying gamma-distributed DDE. Finally, we illustrate how to implement the hypoexponential approximation to estimate the parameters of an epidemiological model in Stan in Section 5 before finishing with a brief discussion.
1.1 Notation and assumptions
Choosing an appropriate state space for DDEs with infinite delay can be subtle (Cassidy & Humphries, 2019; Hale & Verduyn Lunel, 1993). Here, for fixed  , we follow Diekmann & Gyllenberg (2012); Gyllenberg et al. (2018); Hino et al. (1991) and consider the state space
, we follow Diekmann & Gyllenberg (2012); Gyllenberg et al. (2018); Hino et al. (1991) and consider the state space  given by
given by
 |
(1.2) |
 is a Banach space under the norm
is a Banach space under the norm
 |
In practice, we take  so that the convolution integral in (1.1) converges at time
so that the convolution integral in (1.1) converges at time  .
.
The IVP (1.1) has a unique solution  if
if  is globally Lipschitz (Diekmann & Gyllenberg, 2012). We immediately obtain that the solution
is globally Lipschitz (Diekmann & Gyllenberg, 2012). We immediately obtain that the solution  is continuous on
is continuous on  . However, to establish the accuracy of the FCRK method, we require further differentiability of the solution
. However, to establish the accuracy of the FCRK method, we require further differentiability of the solution  , and consequently, the function
, and consequently, the function  . In general, the convolution integral in (1.1) smooths the initial function
. In general, the convolution integral in (1.1) smooths the initial function  for
for  , as the kernel
, as the kernel  is analytic, and ensures that the only possible breaking point is
is analytic, and ensures that the only possible breaking point is  . Then, if the function
. Then, if the function  is
is  -times differentiable,
-times differentiable,  is
is  times differentiable for
times differentiable for 
Throughout the paper, we use the following notation. If  , then the ceiling and floor of
, then the ceiling and floor of  are defined as
are defined as  and
and  , respectively. The fractional part of
, respectively. The fractional part of  is denoted
is denoted  . The nearest integer to
. The nearest integer to  is denoted
is denoted  . We parameterize the gamma distribution with shape and rate parameters and denote a gamma distribution with shape parameter
. We parameterize the gamma distribution with shape and rate parameters and denote a gamma distribution with shape parameter  and rate parameter
and rate parameter  by
by  . Hence, when a random variable
. Hence, when a random variable  , then
, then  has mean
has mean  and variance
and variance  . Similarily, we denote a hypoexponential distribution with rates
. Similarily, we denote a hypoexponential distribution with rates  by
by  . Finally, we denote the function segment
. Finally, we denote the function segment  for
for  .
.
2. FCRK methods
Most existing numerical methods for DDEs have been adapted from known numerical methods for ODEs (Bellen et al., 2009; Enright & Hayashi, 1997; Eremin, 2016; Vermiglio, 1988). For a given stepsize  and integration mesh given by
and integration mesh given by  , these continuous Runge–Kutta (CRK) methods are designed to output a continuous function over the delay interval. This continuous function is then used to evaluate the solution at the abscissa
, these continuous Runge–Kutta (CRK) methods are designed to output a continuous function over the delay interval. This continuous function is then used to evaluate the solution at the abscissa  of the RK method, which is necessary for accurate evaluation of the intermediate functions in each CRK step, since these fall at time points
of the RK method, which is necessary for accurate evaluation of the intermediate functions in each CRK step, since these fall at time points  which typically do not fall on the integration mesh. This illustrates another difficulty with CRK methods: when the delay
which typically do not fall on the integration mesh. This illustrates another difficulty with CRK methods: when the delay  is smaller than the stepsize
is smaller than the stepsize  , as if
, as if  , then overlapping will occur, i.e. the
, then overlapping will occur, i.e. the  st step will require knowledge of the solution in the current step (Eremin, 2019; Eremin et al., 2020), and the method can no longer be explicit. Overlapping is inevitable when solving (1.1) since the convolution integral in (1.1) requires knowledge of the solution
st step will require knowledge of the solution in the current step (Eremin, 2019; Eremin et al., 2020), and the method can no longer be explicit. Overlapping is inevitable when solving (1.1) since the convolution integral in (1.1) requires knowledge of the solution  on the entire semi-infinite interval
on the entire semi-infinite interval  .
.
A class of methods, now called FCRK methods, has been developed which have a continuous interpolant associated with each stage of the Runge–Kutta method, allowing for the construction of methods which remain explicit even in the case of overlapping. Such methods were first proposed in the 1970s (Cryer & Tavernini, 1972; Tavernini, 1971), with the convergence theory and construction of explicit methods up to order 4 derived in the 2000s (Bellen et al., 2009; Maset et al., 2005). However, the development of the methods to that point had been purely theoretical, and the works cited above do not contain any implementations or numerical simulations. FCRK methods have recently been implemented for distributed DDEs with possibly time dependent, but finite, delay (Eremin, 2019; Langlois et al., 2017). To our knowledge, Langlois et al. (2017) was the first instance of applying these FCRK methods to explicitly simulate a distributed DDE arising in mathematical biology. Here, we implement a fourth-order FCRK method for the infinite delay initial value problem (1.1). In what follows, we consider fixed time step methods and leave the variable time step case to future work.
Following Definition 6.1 of Bellen et al. (2009), we define an s-stage FCRK method as follows.
Definition 2.1.
-stage FCRK method —
A
-stage FCRK method is a triple
such that
and
are polynomial functions into
and
, respectively, with
and
, and
with

It is customary to represent a  -stage FCRK method
-stage FCRK method  by its Butcher tableau
by its Butcher tableau
 |
where  and
and  and
and  are the components of
are the components of  and
and  Now, for a given step size
Now, for a given step size  , the
, the  -stage FCRK method creates a continuous approximation
-stage FCRK method creates a continuous approximation  to the solution of the IVP (1.1)
to the solution of the IVP (1.1)  through
through
 |
(2.1) |
The stage interpolant  is a continuous approximation of the solution
is a continuous approximation of the solution  defined by
defined by
 |
(2.2) |
where
 |
(2.3) |
are the stage variables,  represents the numerical approximation of the solution up to the current stage and
represents the numerical approximation of the solution up to the current stage and  is the continuous approximation of
is the continuous approximation of  in the stage given by
in the stage given by
 |
Thus, the piecewise interpolants  agree with
agree with  at the collocation points
at the collocation points  and define the piecewise continuous polynominal function
and define the piecewise continuous polynominal function  . For (1.1) with history function
. For (1.1) with history function  and stepsize
and stepsize  computed up to
computed up to  , the local error function is given by
, the local error function is given by
 |
The uniform and discrete order of an FCRK method are intrinsically related to this local error function (see Equation (1.2) and Definition 4.1 in Maset et al. (2005)). The uniform order of an FCRK method is the maximal error incurred over a single time step:
Definition 2.2. Uniform order. —
Let
be a positive integer and let
be the approximation of the solution
of an IVP with sufficiently smooth right hand side obtained using an FCRK method with step size
. The FCRK method has uniform order
if

Conversely, the discrete order is the error incurred at the collocation points  , which corresponds to
, which corresponds to  in the definition of
in the definition of  :
:
Definition 2.3. Discrete order. —
Let
be a positive integer and let
be the approximation of the solution
of an IVP with sufficiently smooth right-hand side obtained using an FCRK method with step size
. The FCRK method has discrete order
if

Finally, the global order of the numerical method is the absolute error incurred throughout the simulation when considering the solution  and
and  as continuous functions on the interval
as continuous functions on the interval  .
.
Definition 2.4. Global order. —
A
-stage method has global order
if

The connection between the local error measurements given in Definitions 2.2 and 2.3 and the global order of an FCRK method is considered by Bellen & Zennaro (2013) and Bellen et al. (2009). Explicitly, if the  -stage method has global order
-stage method has global order  on
on  , then
, then  is a
is a  th order approximation of
th order approximation of  as
as
 |
In what follows, we use the fourth-order explicit FCRK method due to Tavernini (1971) with global fourth order and Butcher tableau given by (Bellen et al., 2009)
 |
(2.4) |
although our results hold for other FCRK schemes.
2.1 Numerical quadrature
In theory, FCRK methods are directly applicable to the infinite delay case (1.1). However, in practice, a s-stage FCRK method implicitly assumes the ability to accurately calculate the right-hand side of equation (1.1). Accordingly, the main difficulty in numerically simulating (1.1) is the numerical calculation of the improper convolution integral
 |
appearing in (2.3).
Most numerical quadrature methods are designed for a compact domain of integration. However, artificially truncating the convolution integral in (1.1) would introduce unnecessary error while simultaneously ensuring that the FCRK method is not consistent as the quadrature stepsize,  , converges to 0. Thus, to compute the convolution integral, we map the semi-infinite domain of integration to the compact set
, converges to 0. Thus, to compute the convolution integral, we map the semi-infinite domain of integration to the compact set  through the change of variables
through the change of variables
 |
where  and
and  are two parameters determined later. The improper integral then becomes
are two parameters determined later. The improper integral then becomes
 |
(2.5) |
In general, we require a  times continuously differentiable integrand for a
times continuously differentiable integrand for a  th order composite Newton–Cotes quadrature method to obtain
th order composite Newton–Cotes quadrature method to obtain  th order accuracy. To ensure that our change of variable does not prohibit achieving such accuracy, we show how to choose the positive constants
th order accuracy. To ensure that our change of variable does not prohibit achieving such accuracy, we show how to choose the positive constants  and
and  to ensure that the transformed integrand is sufficiently smooth for our numerical integration techniques. This requirement is naturally dependent on the smoothness of the solution
to ensure that the transformed integrand is sufficiently smooth for our numerical integration techniques. This requirement is naturally dependent on the smoothness of the solution  and the history function
and the history function  Furthermore, even if
Furthermore, even if  is differentiable, it is likely that
is differentiable, it is likely that
 |
where the superscripts denote limits from the left and right, so the solution  is not continuously differentiable at
is not continuously differentiable at  (Bellen et al., 2009). Accordingly, when implementing a numerical quadrature method, we will enforce that transformed initial point
(Bellen et al., 2009). Accordingly, when implementing a numerical quadrature method, we will enforce that transformed initial point  is part of the integration mesh. We now show how to choose
is part of the integration mesh. We now show how to choose  and
and  to ensure that the integrand is sufficiently smooth away from this breaking point.
to ensure that the integrand is sufficiently smooth away from this breaking point.
Lemma 2.1.
Assume that
is
times differentiable and set
(2.6) Then,
is
times differentiable in
for
. Furthermore, if the
th derivative of
,
, is bounded for
, then there exists
such that
for
.
The proof of Lemma 2.1 is straightforward and follows from the rapid decay of  at
at  . This decay, along with the fact that the history function
. This decay, along with the fact that the history function  belongs to the function space
belongs to the function space  for
for  , ensures that
, ensures that  as
as  . We give the full proof in Appendix A. In practice, we use the fifth-order open composite Simpson’s rule, which is the fifth-order composite open Newton–Cotes method, and require the integrand to have a bounded fourth derivative. Therefore, when implementing the FCRK method, we apply (2.6) with
. We give the full proof in Appendix A. In practice, we use the fifth-order open composite Simpson’s rule, which is the fifth-order composite open Newton–Cotes method, and require the integrand to have a bounded fourth derivative. Therefore, when implementing the FCRK method, we apply (2.6) with  . When evaluating the numerical approximation of the convolution integral (2.5), we avoid the mesh points
. When evaluating the numerical approximation of the convolution integral (2.5), we avoid the mesh points  where the interpolant is continuous but not differentiable by ensuring these points are in the integration mesh. Finally, it is known that solutions of DDEs typically have discontinuous derivatives at breaking points. However, when considering a distributed DDE such as (1.1), we can leverage the additional smoothing offered by the convolution integral and only must ensure that
where the interpolant is continuous but not differentiable by ensuring these points are in the integration mesh. Finally, it is known that solutions of DDEs typically have discontinuous derivatives at breaking points. However, when considering a distributed DDE such as (1.1), we can leverage the additional smoothing offered by the convolution integral and only must ensure that  is in the integration mesh at each time point (Eremin et al., 2020).
is in the integration mesh at each time point (Eremin et al., 2020).
After the change of integration variable, with  and
and  chosen as in (2.6), solving the IVP (1.1) is equivalent to solving
chosen as in (2.6), solving the IVP (1.1) is equivalent to solving
 |
(2.7) |
We recall that  depends explicitly on the solution
depends explicitly on the solution  through the definition (2.5). Finally, while we only consider fixed time step FCRK methods in this work, using variable time step methods on the reformulated IVP (2.7) is possible.
through the definition (2.5). Finally, while we only consider fixed time step FCRK methods in this work, using variable time step methods on the reformulated IVP (2.7) is possible.
Then, to simulate (2.7) using an FCRK method, we must numerically evaluate the convolution integral
 |
(2.8) |
where we note that the integrand is depends explicitly on the solution of (2.7).
2.1.1 Quadrature rules and order conditions
As we are developing an FCRK method to numerically integrate (2.7), we will not evaluate the transformed convolution integral (2.8) exactly. Rather, as mentioned, we will use a quadrature method to numerically evaluate the integral to sufficient accuracy to maintain the global order of the FCRK method. Specifically, we consider an FCRK method of global order  so that the interpolant (2.1) is accurate to order
so that the interpolant (2.1) is accurate to order  on each stage. We thus have
on each stage. We thus have
 |
Therefore, if we were to calculate the convolution integral (2.8) exactly, then we would evaluate the right-hand side of (2.7) to order  . In each RK stage, the evaluations of
. In each RK stage, the evaluations of  occur within the calculation of
occur within the calculation of  , so we gain an extra order of accuracy via the multiplication by
, so we gain an extra order of accuracy via the multiplication by  in (2.2). Then, the local error in each step of the numerical method has order
in (2.2). Then, the local error in each step of the numerical method has order  as required, with the extra order coming from the multiplication by
as required, with the extra order coming from the multiplication by  .
.
However, in practice, we cannot evaluate the convolution integral (2.8) exactly, and nor would we want to do so. Indeed, as the numerical solution  is only a
is only a  -th order approximation of the true solution
-th order approximation of the true solution  , it is not computationally efficient to evaluate the convolution integral
, it is not computationally efficient to evaluate the convolution integral  to extreme precision. Thus, the numerical integration should be sufficiently accurate to preserve the global order of the method, but not so accurate as to be computationally inefficient. To illustrate this idea, assume that we evaluate the integral (2.8) to order
to extreme precision. Thus, the numerical integration should be sufficiently accurate to preserve the global order of the method, but not so accurate as to be computationally inefficient. To illustrate this idea, assume that we evaluate the integral (2.8) to order  using a composite quadrature method with stepsize
using a composite quadrature method with stepsize  , so
, so
 |
where  denotes the quadrature approximation of the convolution integral. Now, consider an FCRK method of order
denotes the quadrature approximation of the convolution integral. Now, consider an FCRK method of order  with coefficients
with coefficients  and stepsize
and stepsize  . Using Taylor’s theorem, we see that
. Using Taylor’s theorem, we see that
 |
where  is the partial derivative of
is the partial derivative of  with respect to the second variable. Therefore, the first stage step
with respect to the second variable. Therefore, the first stage step  is calculated with the same accuracy as the numerical integration. We can thus proceed inductively to calculate each
is calculated with the same accuracy as the numerical integration. We can thus proceed inductively to calculate each  and
and  with accuracy
with accuracy  . Accordingly, for the continuous approximation
. Accordingly, for the continuous approximation  of the solution
of the solution  , equation (2.2) gives
, equation (2.2) gives
 |
Thus, if  for some constant
for some constant  , then
, then  . Therefore, the condition
. Therefore, the condition  ensures that we do neither decrease the accuracy of the scheme nor perform extra computations when numerically integrating (2.8) using a
ensures that we do neither decrease the accuracy of the scheme nor perform extra computations when numerically integrating (2.8) using a  th order quadrature rule.
th order quadrature rule.
Finally, we note that the integrand in (2.8) is not defined at  . Accordingly, we use an open quadrature method so that the end points of the domain of integration,
. Accordingly, we use an open quadrature method so that the end points of the domain of integration,  and
and  , are not included. In particular, we use the composite Simpson’s open rule for which the base method is given by
, are not included. In particular, we use the composite Simpson’s open rule for which the base method is given by
 |
where  . We note that the integrand of (2.8) must be sufficiently smooth inside each integration sub-interval to ensure the composite order. As previously mentioned,
. We note that the integrand of (2.8) must be sufficiently smooth inside each integration sub-interval to ensure the composite order. As previously mentioned,  is a potential breaking point of the distributed DDE. Therefore, we must enforce that
is a potential breaking point of the distributed DDE. Therefore, we must enforce that  is as an end-point of one of the sub-intervals at each step
is as an end-point of one of the sub-intervals at each step  by including
by including
 |
in the quadrature mesh. Furthermore, since  is only
is only  at the mesh points
at the mesh points  preceding the current step
preceding the current step  , we include the transformed mesh points
, we include the transformed mesh points  in the integration mesh. These points may not be evenly spaced in
in the integration mesh. These points may not be evenly spaced in  , and so, the composite Simpson’s open rule does not use a uniform step size
, and so, the composite Simpson’s open rule does not use a uniform step size  to partition
to partition  . To ensure the global accuracy of the FCRK method, it is sufficient to divide
. To ensure the global accuracy of the FCRK method, it is sufficient to divide  into sub-intervals of maximal length
into sub-intervals of maximal length  . The composite quadrature rule therefore has error
. The composite quadrature rule therefore has error  and is sufficiently accurate to maintain the global error of the fourth-order FCRK methods considered here. Indeed, we utilize results from Bellen et al. (2009); Maset et al. (2005) to prove the following result in Appendix C
and is sufficiently accurate to maintain the global error of the fourth-order FCRK methods considered here. Indeed, we utilize results from Bellen et al. (2009); Maset et al. (2005) to prove the following result in Appendix C
Theorem 2.1. Global order of the FCRK method —
Assume that the right-hand side of (1.1) is 4 times continuously differentiable and let
be the explicit FCRK method with global fourth order defined in (2.4). Furthermore, let the simulation mesh include all breaking points of the DDE (1.1) and have maximal stepsize
, and calculate the convolution integral
using the composite Simpson’s open rule with maximal sub-interval size of
. Then, the FCRK method has global order 4.
3. ODE approximations
In Section 2, we developed a numerical method to solve the distributed DDE (1.1). As mentioned, numerical methods for distributed DDEs are computationally demanding, complicated and as a result, not available in most off-the-shelf scientific software packages. Therefore, we discuss a common method by which modellers avoid these difficulties via an Erlang approximation of (1.1) before deriving a new phase-type approximation of (1.1).
3.1 Erlang approximation
In many modelling applications, it is common to avoid the difficulties in simulating (1.1) by enforcing that  . As previously mentioned, the case
. As previously mentioned, the case  corresponds to
corresponds to  , where
, where  and
and  are the mean and variance of the underlying gamma distribution. As
are the mean and variance of the underlying gamma distribution. As  being an integer multiple of
being an integer multiple of  is not generic, it is common to round
is not generic, it is common to round  to the nearest integer
to the nearest integer  and then set the rate parameter
and then set the rate parameter  . This approximation allows modellers to replace the gamma distributed delay with an Erlang distribution and thus approximate (1.1) by the Erlang distributed DDE
. This approximation allows modellers to replace the gamma distributed delay with an Erlang distribution and thus approximate (1.1) by the Erlang distributed DDE
 |
(3.1) |
The Erlang-distributed random variable  with shape and rate parameters
with shape and rate parameters  and
and  , respectively, has precisely the same mean
, respectively, has precisely the same mean  as the random variable in (1.1), but not the same variance. Then, it is a simple application of the linear chain technique—where the convolution integral is written as the solution to a system of differential equations—to obtain the equivalent ODE formulation to (3.1)
as the random variable in (1.1), but not the same variance. Then, it is a simple application of the linear chain technique—where the convolution integral is written as the solution to a system of differential equations—to obtain the equivalent ODE formulation to (3.1)
 |
(3.2) |
3.2 Hypoexponenetial approximations
The approximation involved in the linear chain technique described previously replaces the gamma-distributed convolution integral with an Erlang distributed convolution integral parameterized to match the first moment of the original gamma distribution. Here, we develop an improved approximation technique to approximate the gamma-distributed DDE (1.1) by constructing a random variable  with corresponding probability measure
with corresponding probability measure  that matches the first two moments of the original gamma distribution and considering the corresponding distributed DDE
that matches the first two moments of the original gamma distribution and considering the corresponding distributed DDE
 |
(3.3) |
We construct  such that it represents the concatenation of exponentially distributed random variables, so it is a phase-type distribution, and we show that (3.3) admits a finite dimensional representation. We then derive the equivalent ODE formulation to (3.3) and show that this approximation is more accurate than the approximation in (3.1). There are infinitely many such random variables
such that it represents the concatenation of exponentially distributed random variables, so it is a phase-type distribution, and we show that (3.3) admits a finite dimensional representation. We then derive the equivalent ODE formulation to (3.3) and show that this approximation is more accurate than the approximation in (3.1). There are infinitely many such random variables  and we consider two specific cases. We discuss the benefits of each approximation in Section 3.4.
and we consider two specific cases. We discuss the benefits of each approximation in Section 3.4.
3.2.1 The fixed hypoexponential approximation
We begin by deriving the rates of the exponentially distributed random variables whose concatenation is the random variable  , where
, where  is the concatenation of an Erlang distribution with two exponential distributions. We parametrize the Erlang distribution so that the rates of the Erlang distribution are fixed as the fractional part of
is the concatenation of an Erlang distribution with two exponential distributions. We parametrize the Erlang distribution so that the rates of the Erlang distribution are fixed as the fractional part of  varies. Accordingly, we refer to this approximation as the fixed hypoexponential approximation, with corresponding random probability measure
varies. Accordingly, we refer to this approximation as the fixed hypoexponential approximation, with corresponding random probability measure  .
.
Theorem 3.1.
Consider the gamma distributed random variable
with shape parameter
, mean
and variance
. Let
be the random variable obtained by concatenating
independent and exponentially distributed variables where
of these exponentially distributed random variables have identical rates
while the remaining two exponentially distributed variables have rates
and
. Then, setting
and
ensures that
and
have the same first two moments.


Proof.
The moment generating function (MGF)
of the random variable
is given by
The mean
and variance
of
are therefore
Recalling that
and setting
and
, gives
From this,
must solve
By symmetry,
must be the other root of this polynomial. Hence, we obtain
which ensures that the random variable
matches the first two moments of the gamma distribution.





When  , the square roots in the definition of
, the square roots in the definition of  and
and  vanish identically, leading to the following Corollary.
vanish identically, leading to the following Corollary.
Corollary 3.1.
If the gamma-distributed random variable
has integer shape parameter
, then the random variable
defined in Theorem 3.1 is also Erlang distributed and
for
.
3.2.2 A smoothed hypoexponential approximation
The parametrization of the hypoexponential distribution in Theorem 3.1 is determined by the choice of  and is therefore not unique. Here, we derive a slightly different parameterization of the hypoexponential approximation. This alternative approximation has benefits and a disadvantage compared with the fixed hypoexponential approximation, which we discuss below.
and is therefore not unique. Here, we derive a slightly different parameterization of the hypoexponential approximation. This alternative approximation has benefits and a disadvantage compared with the fixed hypoexponential approximation, which we discuss below.
Again, denote the mean of the gamma-distributed random variable  by
by  and let
and let  denote the shape parameter. Now we define a second hypoexponentially distributed random variable
denote the shape parameter. Now we define a second hypoexponentially distributed random variable  with the same mean and variance as
with the same mean and variance as  . We once again use a concatenation of an Erlang distribution with two exponential distributions. Here, unlike the fixed approximation described in Theorem 3.1, the rate of the Erlang distribution varies continuously as the fractional part of
. We once again use a concatenation of an Erlang distribution with two exponential distributions. Here, unlike the fixed approximation described in Theorem 3.1, the rate of the Erlang distribution varies continuously as the fractional part of  changes. We therefore refer to this approximation as the smoothed hypoexponential approximation, with corresponding probability measure
changes. We therefore refer to this approximation as the smoothed hypoexponential approximation, with corresponding probability measure  .
.
Theorem 3.2.
Let
be a
-distributed random variable where
. Consider the hypoexponentially distributed random variable
with rate parameters
. Recalling that
as
, set
, and define
and
by
(3.4) If
, then we define
. Then,
and
have the first two moments.
The proof of Theorem 3.2 is similar to the proof of Theorem 3.1 and is given in Appendix B. We note that we use the term smooth when describing the smoothed hypoexpoential approximation of  to refer to the continuous dependence of
to refer to the continuous dependence of  on
on  and not in the infinitely differentiable sense. Once again, if
and not in the infinitely differentiable sense. Once again, if  is an integer, it follows from the definition that the smoothed hypoexponential approximation is exact.
is an integer, it follows from the definition that the smoothed hypoexponential approximation is exact.
3.3 ODE representation of the hypoexponential DDE
The random variables  and
and  as defined in Theorems 3.1 and 3.2 correspond to the concatenation or addition of
as defined in Theorems 3.1 and 3.2 correspond to the concatenation or addition of  exponentially distributed random variables. As the derivation that follows is identical for the smoothed and fixed approximations, we drop the indices
exponentially distributed random variables. As the derivation that follows is identical for the smoothed and fixed approximations, we drop the indices  and
and  . The PDF of the hypoexponential distributions is obtained by convolving the PDFs of an Erlang distributed random variable with rate
. The PDF of the hypoexponential distributions is obtained by convolving the PDFs of an Erlang distributed random variable with rate  and shape parameter
and shape parameter  , and the two exponentially distributed random variables with respective rates
, and the two exponentially distributed random variables with respective rates  and
and  , where the rates are given explicitly in Theorems 3.1 and 3.2. The exponential distributions have respective PDFs
, where the rates are given explicitly in Theorems 3.1 and 3.2. The exponential distributions have respective PDFs  and
and  . Then, the delayed term in (3.3) is given by the convolution integral
. Then, the delayed term in (3.3) is given by the convolution integral
 |
where  . The convolution integral
. The convolution integral
 |
will satisfy a system of  ODEs in a similar manner to the linear chain technique (Cassidy, 2021; Diekmann et al., 2018, 2020a). To show that this is indeed the case, we introduce
ODEs in a similar manner to the linear chain technique (Cassidy, 2021; Diekmann et al., 2018, 2020a). To show that this is indeed the case, we introduce  auxiliary variables
auxiliary variables  satisfying
satisfying
 |
with initial conditions
 |
and
 |
Then, using the linear chain technique on the Erlang-distributed variables  for
for  , we see
, we see
 |
Then, an application of the main result in (Cassidy, 2021) shows that
 |
It follows from the associativity of convolution that
 |
Therefore, the distributed DDE (3.3) is equivalent to the  dimensional system of ODEs
dimensional system of ODEs
 |
(3.5) |
where the rates  and
and  are taken from the fixed or smooth hypoexponential approximation.
are taken from the fixed or smooth hypoexponential approximation.
3.4 A comparison between fixed and smooth hypoexponential approximations
The rates  and
and  determine the expected residence time in the
determine the expected residence time in the  st and
st and  th compartments. Now, if these rates were to grow arbitrarily large, then the expected residence time would become arbitrarily small and the system of differential equations would become stiff. Furthermore, the dynamical system obtained from the gamma-distributed DDE has interesting behaviour as a function of the shape parameter
th compartments. Now, if these rates were to grow arbitrarily large, then the expected residence time would become arbitrarily small and the system of differential equations would become stiff. Furthermore, the dynamical system obtained from the gamma-distributed DDE has interesting behaviour as a function of the shape parameter  . For
. For  we expect the gamma-distributed DDE to define an infinite dimensional dynamical system. However, when
we expect the gamma-distributed DDE to define an infinite dimensional dynamical system. However, when  the gamma-distributed DDE can be reduced to a finite dimensional system of ODEs through the linear chain technique as detailed in Section 3.1. Assuming continuous dependence of dynamics on the parameter
the gamma-distributed DDE can be reduced to a finite dimensional system of ODEs through the linear chain technique as detailed in Section 3.1. Assuming continuous dependence of dynamics on the parameter  , as
, as  the gamma-distributed DDE approaches a transit compartment model with
the gamma-distributed DDE approaches a transit compartment model with  compartments. However, both the fixed and smoothed approximations are equivalent to transit compartment models with
compartments. However, both the fixed and smoothed approximations are equivalent to transit compartment models with  compartments. Thus, it is possible that the residence time in the final compartment becomes arbitrarily small so that the extra compartment in the hypoexponential approximation is negligible at the cost of the ODE system becoming stiff.
compartments. Thus, it is possible that the residence time in the final compartment becomes arbitrarily small so that the extra compartment in the hypoexponential approximation is negligible at the cost of the ODE system becoming stiff.
To formalize this argument, consider the limit of  and the fixed hypoexponential distribution. Then,
and the fixed hypoexponential distribution. Then,  and
and  must simultaneously satisfy
must simultaneously satisfy
 |
which is only possible if  It is simple to show that, if
It is simple to show that, if  the rates
the rates  and
and  are bounded from above so that this stiffness only occurs when
are bounded from above so that this stiffness only occurs when  for the fixed hypoexponential distribution.
for the fixed hypoexponential distribution.
Now, consider the smoothed approximation and  for each integer
for each integer  . We immediately see that the rate
. We immediately see that the rate  can become arbitrary large in the limit, and the system of ODEs becomes stiff. In addition, as
can become arbitrary large in the limit, and the system of ODEs becomes stiff. In addition, as  , the argument of the square roots
, the argument of the square roots  in (3.4) approaches
in (3.4) approaches  , and the derivative of
, and the derivative of  becomes arbitrarily large as
becomes arbitrarily large as  . This is problematic for optimization methods that require the gradient of the objective function. To circumvent these singularities in the smooth hypoexponential approximation, we slightly modify (3.4) by replacing
. This is problematic for optimization methods that require the gradient of the objective function. To circumvent these singularities in the smooth hypoexponential approximation, we slightly modify (3.4) by replacing  and
and  by
by  and
and  , defined by
, defined by
 |
where  is a small constant. By choosing
is a small constant. By choosing  , the practitioner can now trade-off the size of the discontinuities of the objective function at integer values of
, the practitioner can now trade-off the size of the discontinuities of the objective function at integer values of  , with the level of stiffness of the resulting ODEs. As we will see in Section 5, for statistical inference, one often needs to optimize an objective function which depends on the solution of a DDE (1.1) at certain time points
, with the level of stiffness of the resulting ODEs. As we will see in Section 5, for statistical inference, one often needs to optimize an objective function which depends on the solution of a DDE (1.1) at certain time points  . For many optimization algorithms, it helps if the objective function depends smoothly on the model parameters, including
. For many optimization algorithms, it helps if the objective function depends smoothly on the model parameters, including  , and so using the smoothed hypoexponential in these scenarios may be advantageous.
, and so using the smoothed hypoexponential in these scenarios may be advantageous.
Furthermore, we note that the approximations in Theorems 3.1 and 3.2 are approximations of the semi-infinite convolution integral in (1.1). To compare the hypoexponential approximations against the true gamma distribution, we first consider the survival function of the gamma distribution with mean  and shape parameter
and shape parameter  which is given by
which is given by
 |
We also compute the survival functions corresponding to the fixed and smoothed hypoexponential approximations of the gamma distribution with mean  and shape parameter
and shape parameter 
 |
(3.6) |
We plot  and
and  in Fig. 1 to illustrate the difference between the fixed and smoothed hypoexponential approximations. We do not present
in Fig. 1 to illustrate the difference between the fixed and smoothed hypoexponential approximations. We do not present  as it overlaps the two approximations. Furthermore, for fixed
as it overlaps the two approximations. Furthermore, for fixed  it is possible to view
it is possible to view  and
and  as functions of
as functions of  . In Fig. 1 (B), we show this function for both approximations and the exact solution. For the fixed hypoexponential approximation (derived in Theorem 3.1)
. In Fig. 1 (B), we show this function for both approximations and the exact solution. For the fixed hypoexponential approximation (derived in Theorem 3.1)  , we generally lose continuous dependence on the parameter
, we generally lose continuous dependence on the parameter  at integer values as the rates of the Erlang distribution
at integer values as the rates of the Erlang distribution  do not vary continuously but rather jump as
do not vary continuously but rather jump as  crosses each integer. However, using the smoothed hypoexponential parameterization, the rates
crosses each integer. However, using the smoothed hypoexponential parameterization, the rates  vary continuously with
vary continuously with  which appears to reduce the size of jumps at integer values of
which appears to reduce the size of jumps at integer values of  . However, an analytical study of these jumps is beyond the scope of the current work.
. However, an analytical study of these jumps is beyond the scope of the current work.
Fig. 1.
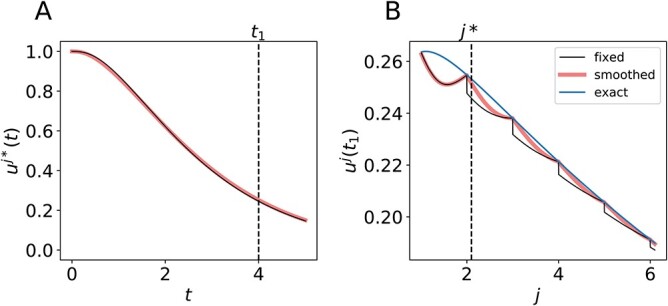
Trajectory dependence on the shape parameter  is not smooth. (A) The trajectory
is not smooth. (A) The trajectory  and
and  for
for  calculated with the fixed (black) and smoothed (red) hypoexponential approximations in (3.6). The exact solution
calculated with the fixed (black) and smoothed (red) hypoexponential approximations in (3.6). The exact solution  is not shown as it overlaps with the two curves. (B) The graph of
is not shown as it overlaps with the two curves. (B) The graph of  with
with  , using the fixed (black) and smoothed (red) parameterizations of the hypoexponential approximation, and the exact solution (blue).
, using the fixed (black) and smoothed (red) parameterizations of the hypoexponential approximation, and the exact solution (blue).
3.5 Approximation error estimates
The natural phase space for distributed DDEs such as (1.1) or (3.3) is the space of exponentially weighted functions  (Cassidy, 2021; Diekmann & Gyllenberg, 2012). In general, solutions evolving from the space of
(Cassidy, 2021; Diekmann & Gyllenberg, 2012). In general, solutions evolving from the space of  measurable functions remain integrable with respect to
measurable functions remain integrable with respect to  (Cassidy & Humphries, 2019; Hale, 1974).
(Cassidy & Humphries, 2019; Hale, 1974).
Now, for the rate parameter of the gamma distribution given by  , solutions of the gamma-distributed DDE will satisfy the growth bound in (1.2) with
, solutions of the gamma-distributed DDE will satisfy the growth bound in (1.2) with  . Furthermore, solutions
. Furthermore, solutions  of linear gamma-distributed DDE (1.1) are of the form
of linear gamma-distributed DDE (1.1) are of the form  with
with  . To illustrate the increased accuracy offered by the hypoexponential approximation, we use this linear case to derive explicit bounds for the approximation error induced by replacing the gamma distribution in (1.1) by an Erlang distribution as in (3.1) or by the hypoexponential approximation in (3.3). In both cases, we will express the approximation error as the difference of the MGFs evaluated at
. To illustrate the increased accuracy offered by the hypoexponential approximation, we use this linear case to derive explicit bounds for the approximation error induced by replacing the gamma distribution in (1.1) by an Erlang distribution as in (3.1) or by the hypoexponential approximation in (3.3). In both cases, we will express the approximation error as the difference of the MGFs evaluated at  and we will see that the hypoexponential approximation has one fewer term than the Erlang approximation.
and we will see that the hypoexponential approximation has one fewer term than the Erlang approximation.
3.5.1 Erlang-distributed DDE
In the Erlang approximation described in Section 3.1, we approximated the convolution integral in the gamma-distributed DDE
 |
where  is the rate of the approximating Erlang distribution, and the Erlang-distributed DDE (3.1) is otherwise identical to (1.1). Thus, to compute the error induced by this approximation, we consider the difference between the convolution integrals where
is the rate of the approximating Erlang distribution, and the Erlang-distributed DDE (3.1) is otherwise identical to (1.1). Thus, to compute the error induced by this approximation, we consider the difference between the convolution integrals where 
 |
We immediately obtain
 |
where the MGF of the gamma-distributed random variable is given by
 |
and  is the MGF of the Erlang distribution
is the MGF of the Erlang distribution
 |
Then,
 |
(3.7) |
Using the binomial theorem and the fact that the Erlang distribution is parameterized so that the first moment matches that of the gamma distribution, we can write the numerator in (3.7) as
 |
Thus, the approximation error in the Erlang approximation case (see Section 3.1) is order  . We see from the above analysis that if
. We see from the above analysis that if  , then (3.7) is identically 0 and the approximation is exact.
, then (3.7) is identically 0 and the approximation is exact.
3.5.2 Hypoexponential approximations
Turning to the two moment approximations derived in Theorems 3.1 and 3.2, we see that the approximation error induced by integrating with respect to the random variable  is given by
is given by
 |
Then, we obtain
 |
(3.8) |
where  is the MGF of the random variable
is the MGF of the random variable  and is given by
and is given by
 |
Then, we see
 |
(3.9) |
By recalling that  and the fact that the first two moments agree, we use the binomial theorem to write the numerator in (3.9) as
and the fact that the first two moments agree, we use the binomial theorem to write the numerator in (3.9) as
 |
Now, recalling that  and
and  , we have
, we have
 |
Thus, as  and
and  are entirely determined by the mean and variance of the gamma distribution, we can write the error (3.8) as
are entirely determined by the mean and variance of the gamma distribution, we can write the error (3.8) as
 |
where  Accordingly, we see that the approximation error is order
Accordingly, we see that the approximation error is order  , or one order better than the Erlang-distributed DDE approximation. We also see that for
, or one order better than the Erlang-distributed DDE approximation. We also see that for  as
as  as in Section 3.2,
as in Section 3.2,  so (3.9) is identically 0, and the approximation is exact.
so (3.9) is identically 0, and the approximation is exact.
3.6 On three moment matching
The ODE approximations in this section aim to replicate the gamma-distributed DDE by matching the first (in the case of the Erlang approximation) or first and second moments (in the hypoexponential approximations) of the underlying gamma distribution. It is natural to ask if a similar technique could allow for a more accurate approximation by matching the first three moments. To address this question, it is simpler and equivalent to match first three cumulants, rather than moments, of gamma and hypoexponential. The cumulant generating function of a gamma-distributed random variable  with shape and rate parameters
with shape and rate parameters  and
and  is given by
is given by
 |
Therefore, the cumulants  are
are
 |
Conversely, the cumulant generating function of hypoexponential-distributed random variable  is given by
is given by
 |
Therefore, the cumulants of  are given by
are given by
 |
Now, we show that if a hypoexponential distribution matches the first three cumulants, and thus moments, of  then
then  .
.
Theorem 3.3.
Let
be a gamma-distributed random variable and assume that
such that
for
. Then,
.
Proof.
Without loss of generality by scaling, we take
. Write
, so that
. The following system of equations for the first three cumulants must hold
Now, consider the sum
. We have
and therefore
As all terms of
are non-negative, we must have
for all
. As
, we obtain
for all
. It follows that
and
.

We therefore conclude that it is not possible to match the first three moments of a generic gamma distribution using a hypoexponential approximation. This three moment matching problem has been extensively studied (Bobbio et al., 2005; Osogami & Harchol-Balter, 2006). A generalized hypoexponential random variable corresponding to a Markov chain where each stage is visited at most once, i.e. the linear chain flows in one direction but some stages can be skipped, can be used to match the first three moments of gamma-distributed random variable. However, these generalized hypoexponential random variables are more demanding to implement than the hypoexponential approximations derived in Theorems 3.1 and 3.2. In short, their output varies depending on normalized moments, require at least as many parameters as the hypoexponential approximations, and the non-zero probability of skipping stages does not allow for a simple skip-free Markov chain interpretation as in the hypoexponential approximation.
4. Numerical results
Here, we illustrate the analytical results of Section 2 and evaluate the hypoexponential approximations derived in Section 3.2 by comparing the direct simulation of (1.1) using the FCRK method in Section 2 against the numerical simulation of the approximate ODE (3.3) and the Erlang distributed DDE (3.1). We first show that the FCRK method for (1.1) is accurate to the order demonstrated in Theorem 2.1. We then test the accuracy of the hypoexponential approximation derived in Section 3.2 using our FCRK method to provide reference solutions of generic gamma-distributed DDEs.
4.1 Numerical verification of the FCRK method
We test the fourth-order FCRK numerical solver by comparing the output of the FCRK method for (1.1) against differential equations with known, or reference, solutions. To obtain these known solutions, we first consider (1.1) in the case where the shape parameter  is an integer. The gamma distribution in (1.1) is thus an Erlang distribution so, using the linear chain technique, we derive an equivalent ODE formulation. This equivalent ODE formulation can either be solved analytically or simulated using established techniques for systems of ODEs as implemented in Matlab to give the reference solution
is an integer. The gamma distribution in (1.1) is thus an Erlang distribution so, using the linear chain technique, we derive an equivalent ODE formulation. This equivalent ODE formulation can either be solved analytically or simulated using established techniques for systems of ODEs as implemented in Matlab to give the reference solution  .
.
We simulate the Erlang-distributed DDE (1.1) using our fourth-order FCRK method to compute the numerical solution  for a given step size
for a given step size  . Then, to compute the accuracy of our simulation, we compute the
. Then, to compute the accuracy of our simulation, we compute the  error between the solution of (1.1), as obtained using our FCRK method, and the reference solution, obtained via the equivalent ODE. In general, when using a
error between the solution of (1.1), as obtained using our FCRK method, and the reference solution, obtained via the equivalent ODE. In general, when using a  th order FCRK method, the error between the numerical solution,
th order FCRK method, the error between the numerical solution,  and the reference solution,
and the reference solution,  , satisfies
, satisfies
 |
where  is the stepsize of the FCRK method. The error
is the stepsize of the FCRK method. The error  then satisfies
then satisfies
 |
Therefore, we consider the error  as a function of the step size
as a function of the step size  of the FCRK method and thus compute
of the FCRK method and thus compute  for a various values of
for a various values of  . The slope of
. The slope of  as a function of
as a function of  is the order
is the order  of the FCRK method.
of the FCRK method.
4.1.1 Linear test problem
We first consider the linear test problem
 |
(4.1) |
where we set  , and choose
, and choose  so the mean delay time
so the mean delay time  . In this case, we can use the linear chain technique to reduce the Erlang distributed DDE in (4.1) to
. In this case, we can use the linear chain technique to reduce the Erlang distributed DDE in (4.1) to
 |
(4.2) |
where
 |
Equation (4.2) is a linear system of ODEs and has an exact solution given by matrix exponentials. For  , the analytical solution is
, the analytical solution is
 |
Thus, we simulate (4.1) using the fourth-order FCRK method described in the preceding section for  and compare it against the analytic solution of (4.2) for
and compare it against the analytic solution of (4.2) for  on the interval
on the interval  . Furthermore, we simulate (4.1) for
. Furthermore, we simulate (4.1) for  and
and  . To compute reference solutions for
. To compute reference solutions for  , we use the fourth-order variable step size RK solver in Matlab (MATLAB, 2017) with an absolute and relative error tolerance of
, we use the fourth-order variable step size RK solver in Matlab (MATLAB, 2017) with an absolute and relative error tolerance of  . We show the error
. We show the error  on the log-log scale and the solution of the DDE in Figure 2.
on the log-log scale and the solution of the DDE in Figure 2.
Fig. 2.
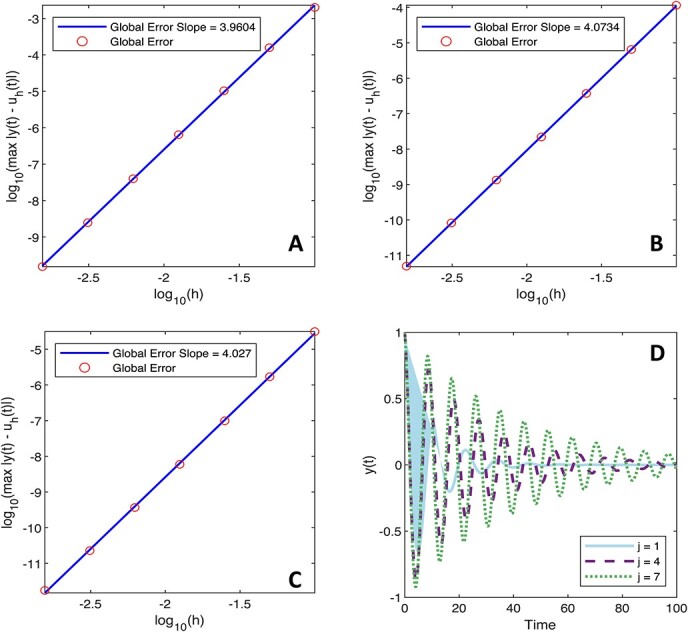
Convergence plots for the linear test problem (4.1). We plot  as a function of
as a function of  . The slope of
. The slope of  gives the convergence rate.
gives the convergence rate.  is the simulation of (4.1) using the fourth-order FCRK method from Section 2 with fixed step size
is the simulation of (4.1) using the fourth-order FCRK method from Section 2 with fixed step size  and
and  is the solution of the equivalent ODE (4.2). Figure (A) shows the comparison against the exact solution when
is the solution of the equivalent ODE (4.2). Figure (A) shows the comparison against the exact solution when  , while figures (B) and (C) show the error between
, while figures (B) and (C) show the error between  and
and  for
for  and
and  , respectively. Figure (D) shows the solution of the DDE for each test case. The solution
, respectively. Figure (D) shows the solution of the DDE for each test case. The solution  of the equivalent ODE (4.2) is calculated using the fourth-order RK method RK45 in Matlab with relative and absolute error tolerance of
of the equivalent ODE (4.2) is calculated using the fourth-order RK method RK45 in Matlab with relative and absolute error tolerance of  .
.
4.1.2 Nonlinear test problem
We next consider the nonlinear test problem
 |
(4.3) |
where we set  , take
, take  , and choose
, and choose  which gives
which gives  . Once again, we set
. Once again, we set
 |
and use the linear chain technique to reduce (4.3) to
 |
(4.4) |
Equation (4.4) is a nonlinear system of ODEs so we do not expect to find an analytical solution. Rather, we once again solve the system of ODEs (4.4) using the fourth-order variable step size RK solver in Matlab (MATLAB, 2017). We solve (4.4) with a tolerance of  and compare this numerical solution against the numerical solution of (4.3) obtained using the FCRK method described in Section 2 on the interval
and compare this numerical solution against the numerical solution of (4.3) obtained using the FCRK method described in Section 2 on the interval  . We show the error
. We show the error  on the log-log scale for
on the log-log scale for  and
and  and the solution of the DDE in Figure 3.
and the solution of the DDE in Figure 3.
Fig. 3.
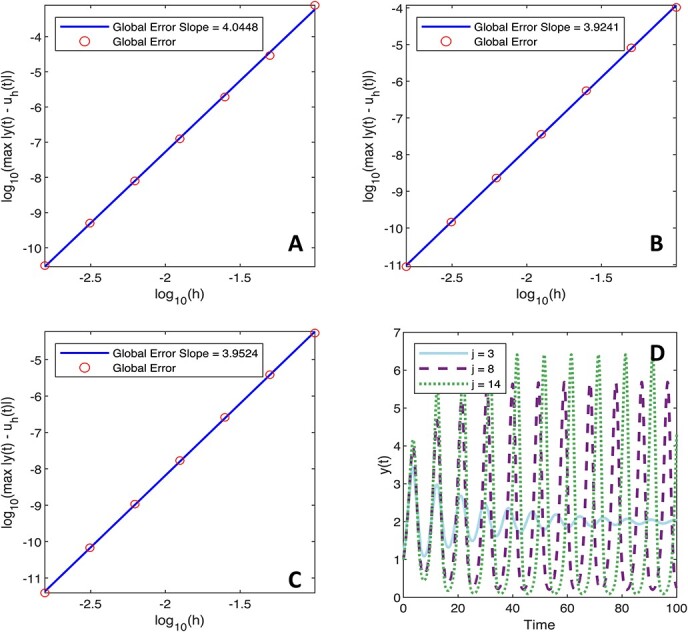
Convergence plots for the nonlinear test problem (4.3). We plot  as a function of
as a function of  . The slope of
. The slope of  gives the convergence rate.
gives the convergence rate.  is the simulation of (4.3) using the fourth-order FCRK method from Section 2 with fixed step size
is the simulation of (4.3) using the fourth-order FCRK method from Section 2 with fixed step size  and
and  is the solution of the equivalent ODE (4.4). Panels (A—C) show the error between
is the solution of the equivalent ODE (4.4). Panels (A—C) show the error between  and
and  for
for  , respectively. Panel (D) shows the solution of the DDE for each test case. The solution
, respectively. Panel (D) shows the solution of the DDE for each test case. The solution  of the equivalent ODE (4.4) is calculated using the fourth-order RK method RK45 in Matlab with relative and absolute error tolerance of
of the equivalent ODE (4.4) is calculated using the fourth-order RK method RK45 in Matlab with relative and absolute error tolerance of  .
.
4.1.3 Linear gamma-distributed DDE
Thus far, we have tested the FCRK method developed in section 2 by simulating Erlang-distributed DDEs and comparing the numerical solution against the solution of the equivalent ODE system. Here, we test our numerical method against a known solution of a gamma-distributed DDE with  . In short, we consider
. In short, we consider
 |
(4.5) |
We note that  is a solution (4.5) and make the ansatz
is a solution (4.5) and make the ansatz  . Inserting
. Inserting  gives the characteristic function
gives the characteristic function
 |
where  is the Laplace transform of the function
is the Laplace transform of the function  evaluated at
evaluated at  . It follows that
. It follows that  for MGF of the gamma-distributed random variable evaluated at
for MGF of the gamma-distributed random variable evaluated at  Thus, a solution of (4.5) must satisfy
Thus, a solution of (4.5) must satisfy
 |
(4.6) |
which implies
 |
Now, for simplicity, we set  so that
so that  and
and
 |
(4.7) |
is a solution of the characteristic function where we must impose  . The corresponding eigenfunction
. The corresponding eigenfunction  is the solution of the linear-distributed DDE for the history function
is the solution of the linear-distributed DDE for the history function  We have thus determined an analytical solution to the linear gamma-distributed DDE (4.5) in against which we can compare the numerical solution obtained by the FCRK method.
We have thus determined an analytical solution to the linear gamma-distributed DDE (4.5) in against which we can compare the numerical solution obtained by the FCRK method.
Now, we consider parameter triples  , set
, set  and calculate
and calculate  by taking the principal root in (4.7). In Fig. 4, we show the convergence of the numerical solution of (4.5) obtained using the FCRK method to the analytical solution for the parameter triples
by taking the principal root in (4.7). In Fig. 4, we show the convergence of the numerical solution of (4.5) obtained using the FCRK method to the analytical solution for the parameter triples  and
and  on the interval
on the interval  .
.
Fig. 4.
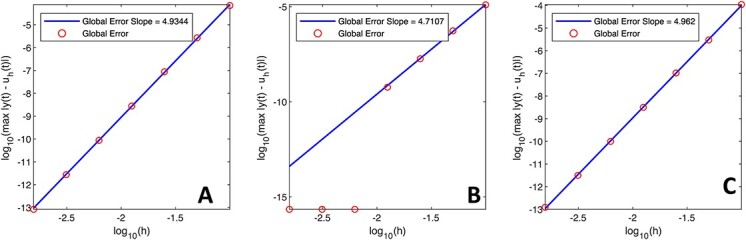
Convergence plots for the linear gamma-distributed DDE test problem (4.5). We plot  as a function of
as a function of  where
where  is the simulation of (4.5) using the fourth-order FCRK method from Section 2 and
is the simulation of (4.5) using the fourth-order FCRK method from Section 2 and  is the analytical solution of the linear-distributed DDE. In B, the error reaches machine precision for
is the analytical solution of the linear-distributed DDE. In B, the error reaches machine precision for  A–C show the error between
A–C show the error between  and
and  for the parameter triples
for the parameter triples  given by
given by  and
and  , respectively.
, respectively.
We note that for the DDEs (4.1) and (4.3), we observe the predicted convergence rate with approximate slope 4 until we reach numerical precision. For the DDE (4.5), the convergence rate is higher than expected and close to 5. However, the DDE (4.5) is linear and its solution is particularly simple being composed of a single exponential function. Numerical analysis is replete with examples of methods which exhibit a higher than required convergence order for certain problems, and this seems to just be another such example. We therefore conclude that the FCRK method derived in Section 2 exhibits the fourth-order global accuracy demonstrated in Theorem 2.1. These numerical tests, when combined with Theorem 2.1, indicate that we can use our FCRK method to provide reference solutions when comparing the Erlang and hypoexponential approximations.
4.2 Numerical evaluation of Erlang and hypoexponential approximations
Having confirmed the accuracy of our FCRK method to solve the distributed DDE (1.1), we now evaluate the Erlang and hypoexponential approximations for the two test problems (4.1) and (4.3) for  . To test the accuracy of the Erlang approximation from Section 3.1, we use (3.2) with shape parameter
. To test the accuracy of the Erlang approximation from Section 3.1, we use (3.2) with shape parameter  and corresponding rate
and corresponding rate  . We also consider the fixed hypoexponential approximation as described in Section 3.2 with
. We also consider the fixed hypoexponential approximation as described in Section 3.2 with  and the rates
and the rates  and
and  as given in Theorem 3.1. In these simulations, the fixed and smoothed approximations are indistinguishable, so we only show the fixed approximation corresponding to
as given in Theorem 3.1. In these simulations, the fixed and smoothed approximations are indistinguishable, so we only show the fixed approximation corresponding to  .
.
In the following simulations, we consider (4.1) and with  ,
,  , and a non-constant history function given by
, and a non-constant history function given by  for
for  . We simulate the nonlinear test problem (4.3) for
. We simulate the nonlinear test problem (4.3) for  and
and  with a constant history function
with a constant history function  .
.
In all cases shown in Fig. 5, the Erlang approximation has a visibly larger error than the hypoexponential approximations. In fact, there is no perceptible difference between the fixed (and consequently, the smoothed) hypoexponential approximation and the solution of the gamma-distributed DDE. While we only present the simulation results for a limited number of test problems, the significantly improved approximation by the hypoexponential approximation, compared against the Erlang approximation, was confirmed by a number of other test cases.
Fig. 5.
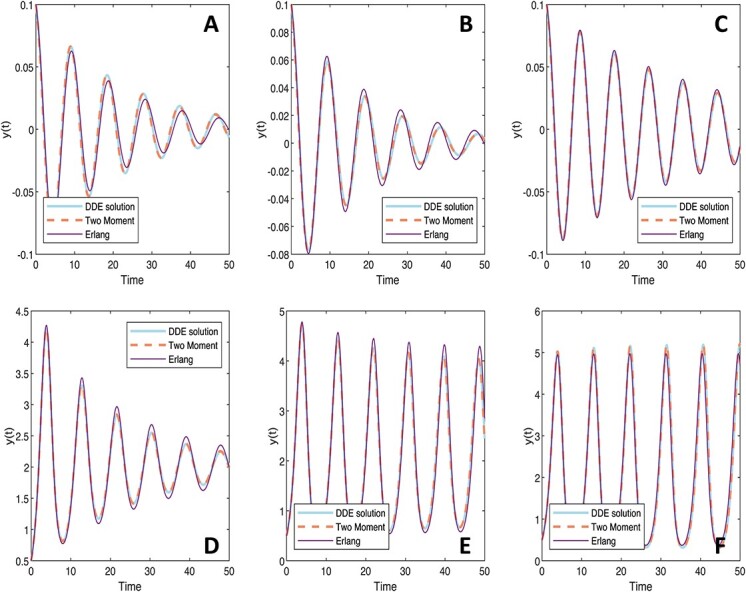
Comparison of ODE approximations to the gamma-distributed DDE (1.1) using the Erlang approximation in equation (3.2) or the fixed hypoexponential approximation  in (3.5). In all cases, the solution of the gamma-distributed DDE as solved using the FCRK method is in solid blue, the solution of the fixed hypoexponential two moment approximation is in dashed orange and the solution of the Erlang approximation is in purple. A–C show the solution of the linear test problem (4.1) for
in (3.5). In all cases, the solution of the gamma-distributed DDE as solved using the FCRK method is in solid blue, the solution of the fixed hypoexponential two moment approximation is in dashed orange and the solution of the Erlang approximation is in purple. A–C show the solution of the linear test problem (4.1) for  and
and  , respectively. D–F show the solution of the nonlinear test problem (4.3) for
, respectively. D–F show the solution of the nonlinear test problem (4.3) for  and
and  , respectively.
, respectively.
4.2.1 Effects on linear stability
To study the effects of replacing the gamma-distributed DDE (1.1) by an Erlang or either hypoexponential approximation, we consider the linear gamma-distributed DDE given in (4.5). We note that  is an equilibrium solution of the linear DDE, and it follows that this linear DDE represents the linearised version of
is an equilibrium solution of the linear DDE, and it follows that this linear DDE represents the linearised version of
 |
where  and
and  and
and  . The principle of linearized stability for delay equations with infinite delay was established by Diekmann & Gyllenberg (2012) and, in short, indicates that the qualitative behaviour of a DDE with infinite delay near an equilibrium solution is determined by the linearized version of the DDE.
. The principle of linearized stability for delay equations with infinite delay was established by Diekmann & Gyllenberg (2012) and, in short, indicates that the qualitative behaviour of a DDE with infinite delay near an equilibrium solution is determined by the linearized version of the DDE.
As a final test of the Erlang and hypoexponential approximations, we consider two specific examples with  and parameters
and parameters  and
and  and chosen near a bifurcation point. We identified the bifurcation point
and chosen near a bifurcation point. We identified the bifurcation point  by following the same analysis as in Campbell & Jessop (2009) and Jessop & Campbell (2010) to calculate the region of stability of the equilibrium solution. There, the authors used
by following the same analysis as in Campbell & Jessop (2009) and Jessop & Campbell (2010) to calculate the region of stability of the equilibrium solution. There, the authors used  as a solution ansatz for the linear DDE (4.5) and calculated conditions to ensure that the characteristic equation has a purely imaginary pair of roots.
as a solution ansatz for the linear DDE (4.5) and calculated conditions to ensure that the characteristic equation has a purely imaginary pair of roots.
In Fig. 6, we show that the hypoexponential approximation has the same stability properties as the solution of the distributed DDE, but that the Erlang approximation does not have the same stability properties. Essentially, for values of  near the bifurcation point
near the bifurcation point  , the Erlang approximation requires rounding
, the Erlang approximation requires rounding  to the nearest integer, which may fall on the opposite side of the bifurcation point, so
to the nearest integer, which may fall on the opposite side of the bifurcation point, so  . Consequently, the Erlang approximation does not replicate the same qualitative behaviour as the gamma DDE. While we did not observe qualitative disagreement between the hypoexponential approximation and the gamma DDE in our simulations, it is possible for the hypoexponential approximation to fail in the same manner, although the Erlang approximation would also fail in this case. In Fig. 6A, we set
. Consequently, the Erlang approximation does not replicate the same qualitative behaviour as the gamma DDE. While we did not observe qualitative disagreement between the hypoexponential approximation and the gamma DDE in our simulations, it is possible for the hypoexponential approximation to fail in the same manner, although the Erlang approximation would also fail in this case. In Fig. 6A, we set  and
and  , while in Fig. 6B, we set
, while in Fig. 6B, we set  and
and  . We parameterize the Erlang and hypoexponential approximations as previously described in Sections 3.1 and 3.2.
. We parameterize the Erlang and hypoexponential approximations as previously described in Sections 3.1 and 3.2.
Fig. 6.
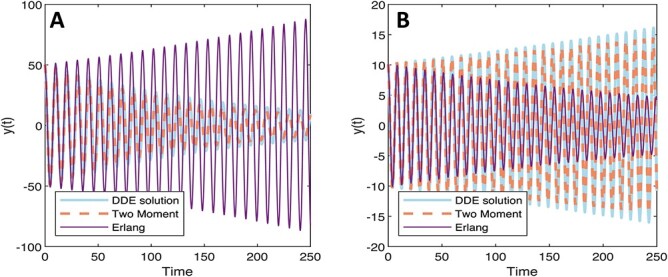
Comparison of ODE approximations to the gamma-distributed DDE (4.5) using the Erlang approximation in equation (3.2) or the fixed hypoexponential two moment approximation in (3.5) showing that the Erlang approximation does not have the same stability properties as the gamma-distributed DDE or the hypoexponential approximation. In all cases, the solution of the gamma-distributed DDE as solved using the FCRK method is in solid blue, the solution of the hypoexponential approximation is in dashed orange and the solution of the Erlang approximation is in purple.
These examples indicate that using an Erlang approximation to replace the gamma-distributed DDE can introduce extreme approximation error and may not replicate the qualitative behaviour of the original gamma distributed DDE. However, these simulations also indicate that the hypoexponential approximation faithfully replicates the dynamics of the linearized gamma-distributed DDE. In this sense, these results strongly advocate for the use of the hypoexponential approximation derived in Section 3.2 rather than the usual Erlang approximation when attempting to approximate the solution of a gamma-distributed DDE with an ODE approximation.
5. Statistical inference
One benefit of the hypoexponential approximation of a gamma-distributed DDE is that it is easily implemented in existing inference software. Here, we demonstrate a possible implementation, using the simple and ubiquitous example of the Kermack–McKendrick (SIR) model from epidemiology, and the probabilistic programming language Stan (Carpenter et al., 2017). For this example, we deliberately choose a simplistic scenario, but the same ideas can be used for more realistic models. We first show how one can formulate the SIR model as a system of DDEs. Then, we derive the hypoexponential ODE approximation using the machinery developed above. We then show how one can build a simple statistical model for two independent data streams that both inform the model’s parameters (including the shape parameter  ). Finally, we fit the model to simulated data.
). Finally, we fit the model to simulated data.
5.1 The Kermack–McKendrik model as a system of DDEs
The SIR model describes fractions of susceptible ( ), infected (
), infected ( ) and recovered (
) and recovered ( ) individuals in a population affected by a pathogen. In our version, the duration of the infectious period
) individuals in a population affected by a pathogen. In our version, the duration of the infectious period  is
is  distributed. Hence, in this example, we ignore individuals that were exposed to the pathogen, but not yet infectious. The mean duration of the infectious period is
distributed. Hence, in this example, we ignore individuals that were exposed to the pathogen, but not yet infectious. The mean duration of the infectious period is  and the variance is
and the variance is  . The infection rate and the initial fraction infected in the population are denoted
. The infection rate and the initial fraction infected in the population are denoted  and
and  , respectively. The model is then given by the following system of DDEs:
, respectively. The model is then given by the following system of DDEs:
 |
(5.1) |
The variable  represents the instantaneous incidence, which is equal to
represents the instantaneous incidence, which is equal to  for
for  , and we define
, and we define  for
for  to jump-start the epidemic (Champredon et al., 2018). Here,
to jump-start the epidemic (Champredon et al., 2018). Here,  is the Dirac delta measure at
is the Dirac delta measure at  . In addition, when
. In addition, when  , we set
, we set  and
and  . Notice that
. Notice that  and
and  have a discontinuity at
have a discontinuity at  , and
, and  , and
, and  .
.
To understand why the system of DDEs (5.1) is correct, first notice that the equation for  is the same as in the standard ODE SIR model: susceptible individuals are depleted at a rate equal to the incidence
is the same as in the standard ODE SIR model: susceptible individuals are depleted at a rate equal to the incidence  , assuming mass action. The equation for
, assuming mass action. The equation for  is a bit less intuitive. The first term
is a bit less intuitive. The first term  represents influx of recently infected susceptible individuals, and the second term is a convolution integral of the same time-delayed incidence, and the PDF of
represents influx of recently infected susceptible individuals, and the second term is a convolution integral of the same time-delayed incidence, and the PDF of  . Hence, this convolution term represents the recovery of individuals at time
. Hence, this convolution term represents the recovery of individuals at time  that were infected
that were infected  time units ago, with the likelihood of recovery
time units ago, with the likelihood of recovery  time units from infection given by
time units from infection given by  .
.
A more formal way to derive (5.1) is to start with the renewal equation formulation of the Kermack–McKendrick model (see, e.g. Diekmann et al. (2012))
 |
(5.2) |
where  is the survival function of the gamma distribution. The fraction of infectious individuals at time
is the survival function of the gamma distribution. The fraction of infectious individuals at time  is then given by
is then given by  , an integral over all individuals infected at time
, an integral over all individuals infected at time  that are still infectious at time
that are still infectious at time  . In order to derive DDE (5.1), we differentiate
. In order to derive DDE (5.1), we differentiate  as follows:
as follows:
 |
Here, differentiating under the integral sign is justified as  is bounded (for
is bounded (for  ) and bounded functions are integrable with respect to the measure
) and bounded functions are integrable with respect to the measure  on the interval
on the interval  .
.
5.2 The hypoexponential approximation of the DDE SIR model
We now approximate DDE (5.1) with a system of ODEs using the method developed in Section 3.2.
Lemma 5.1.
Using the hypoexponential approximation, the above DDE model (5.1) can be replaced by the following system of ODEs:
(5.3) where we write
, with
and the rates
are given by
(5.4) As initial condition, we take
,
, and
for
.
Proof.
We first approximate the gamma distribution
with the hypoexponential distribution with parameters
and then use the linear chain trick to approximate the convolution integral
. This results in the following system of ODEs:
(5.5) The initial conditions for the auxiliary variables
are given by
which holds because
only if
. Notice that
and
. Hence,
for
, and the equation for
in system (5.5) is redundant.

5.3 A statistical model for epidemiological data
Reporting of incidence often happens at discrete time points  , and the reported quantity is the accumulated number of cases observed between consecutive reporting times. Using the above model (5.1), we therefore use the cumulative incidence
, and the reported quantity is the accumulated number of cases observed between consecutive reporting times. Using the above model (5.1), we therefore use the cumulative incidence  to simulate cases
to simulate cases
 |
(5.6) |
where  is a large (known) constant representing the catchment population size, and
is a large (known) constant representing the catchment population size, and  are (positive) reporting times, and we take
are (positive) reporting times, and we take  . The simulated incidence data are shown in Fig. 7A. Conversely, given predictions of the model
. The simulated incidence data are shown in Fig. 7A. Conversely, given predictions of the model  , we can compute the likelihood of data
, we can compute the likelihood of data  , using the probability mass function of the Poisson distribution.
, using the probability mass function of the Poisson distribution.
Fig. 7.
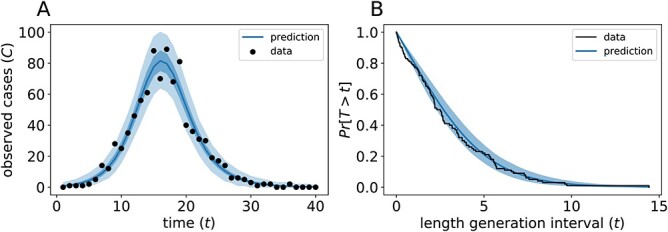
Simulated epidemic data and posterior predictive checks. (A) Simulated data  and the model prediction
and the model prediction  . The dark-blue band represents the
. The dark-blue band represents the  credible interval, and the light-blue band the
credible interval, and the light-blue band the  prediction interval. (B) Simulated serial intervals represented as a empirical survival function (black), and the fitted survival function for
prediction interval. (B) Simulated serial intervals represented as a empirical survival function (black), and the fitted survival function for  given by
given by  (blue).
(blue).
In addition to time series of the number of reported cases, often other data are collected to inform an epidemic model. For example, symptom onset data from transmission couples might be available. Such data consists of the times of symptom onset of pairs of individuals A and B, for whom it is known that A infected B (e.g. by means of genetic evidence). Transmission couple data give information about the length of the generation interval  , which is defined as follows:
, which is defined as follows:
Definition 5.1.
Sample a random infected individual A from the population. Suppose that A was infected at time
by individual B, and suppose that B was infected at time
. The generation interval is then defined as
(5.7) hence, the time between infection of individuals A and B.
Notice that different definitions of  exist in the literature; we refer to Svensson (2007) for a discussion. In practice, the generation interval will almost never be observed but can be approximated by the serial interval, which is the time between symptom onset of individuals A and B.
exist in the literature; we refer to Svensson (2007) for a discussion. In practice, the generation interval will almost never be observed but can be approximated by the serial interval, which is the time between symptom onset of individuals A and B.
Assuming that the duration of the infection is gamma distributed, the hypoexponential approximation method allows one to estimate the shape parameter of this distribution using both time series data and transmission couple data simultaneously, i.e. using ‘evidence synthesis’. For this, we still need a likelihood function for the transmission couple data.
Lemma 5.2.
As before, suppose that the length of the infectious period has a gamma distribution
. The PDF of
is given by
where
is the (upper) incomplete gamma function.
Proof.
Here, we present only a sketch of the proof. See Svensson (2007) and references therein for more details. Let
denote the PDF of
. As in Definition 5.1, consider a randomly sampled individual A, infected at time
and consider all individuals infected at time
. Each of these individuals had an equal chance of infecting A, as long as they are still infectious at time
, which is true with probability
(5.8) Therefore, the probability density
must be proportional to
. To get a proper PDF, we must find the normalizing constant
(5.9) Hence, we find that
(5.10) which proves the lemma.


Suppose that we have  observed serial intervals. Assuming for simplicity that symptom onset is immediate, the distribution of the serial interval and generation interval are identical. The log-likelihood of the data is now the sum of the log-likelihood of the case data
observed serial intervals. Assuming for simplicity that symptom onset is immediate, the distribution of the serial interval and generation interval are identical. The log-likelihood of the data is now the sum of the log-likelihood of the case data  , and the log-likelihood of the transmission-couple data
, and the log-likelihood of the transmission-couple data  , given parameters
, given parameters  , is
, is
 |
(5.11) |
where  is the probability mass function of the Poisson distribution. To demonstrate this approach, we simulated, in addition to observed cases
is the probability mass function of the Poisson distribution. To demonstrate this approach, we simulated, in addition to observed cases  , a small number of generation times
, a small number of generation times  . The simulated serial interval data are shown in Fig. 7B.
. The simulated serial interval data are shown in Fig. 7B.
We then used Stan to fit the model defined by (5.11) to the simulated data in a Bayesian framework, using improper flat priors for all parameters. In the Stan implementation, the DDE model (5.1) was replaced by the system of ODEs (5.3). The fitted model predictions are shown together with the simulated data in Fig. 7A and B. The marginal and joint posterior densities of the model parameters are shown in Fig. 8, together with the ground-truth values used to simulate the data. For all parameters, the ground-truth values are close to the modes of the marginal posterior distributions. We do find strong correlations between all pairs of parameters indicating practical identifiability issues.
Fig. 8.
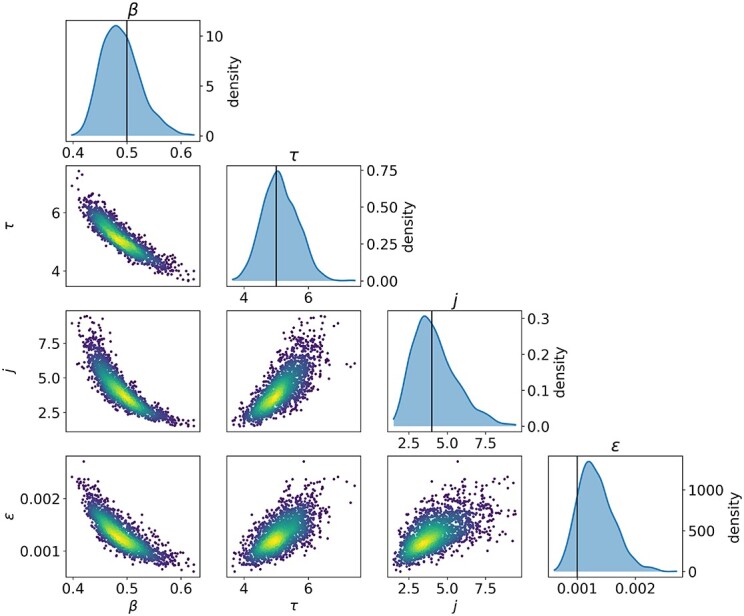
Posterior marginal and joint density for the epidemic model parameters. Each dot in the joint density scatter plots represents a Monte-Carlo sample from the posterior distribution. The color of the dots indicates the density. The black vertical lines represent the ground-truth parameter values. The ground-truth parameters used for the simulation are  ,
,  ,
,  ,
,  ,
,  and
and  .
.
In the SIR model, the shape parameter  of the infectious period
of the infectious period  is hard to identify due to the correlation with other parameters, as shown in Fig. 8. Further complicating matters, the trajectories of the model as a function of
is hard to identify due to the correlation with other parameters, as shown in Fig. 8. Further complicating matters, the trajectories of the model as a function of  are very similar when
are very similar when  is large, which makes the likelihood of the incidence data
is large, which makes the likelihood of the incidence data  not well behaved. This problem has also been described for in-vitro SHIV data (Beauchemin et al., 2017). To resolve such identifiability issues, it can be important to use other data to inform the parameter
not well behaved. This problem has also been described for in-vitro SHIV data (Beauchemin et al., 2017). To resolve such identifiability issues, it can be important to use other data to inform the parameter  . In this example, we used synthetic serial intervals that could be observed during real-life epidemics using transmission pairs. The distribution of these serial intervals depends on the real-valued parameter
. In this example, we used synthetic serial intervals that could be observed during real-life epidemics using transmission pairs. The distribution of these serial intervals depends on the real-valued parameter  . Therefore, to fit the model to both incidence data and serial intervals in an evidence synthesis framework, it is essential that the likelihood of the incidence data also depends on a real-valued shape parameter
. Therefore, to fit the model to both incidence data and serial intervals in an evidence synthesis framework, it is essential that the likelihood of the incidence data also depends on a real-valued shape parameter  .
.
Furthermore, treating  as a first-class real-valued parameter in a statistical model can be important for accurately and efficiently estimating important quantities as the basic reproduction number
as a first-class real-valued parameter in a statistical model can be important for accurately and efficiently estimating important quantities as the basic reproduction number  . For certain childhood diseases, the dynamics of an epidemiological model depend on
. For certain childhood diseases, the dynamics of an epidemiological model depend on  is of a more qualitative nature (Krylova & Earn, 2013) due to bifurcations. As we have shown in Fig. 6, using an Erlang instead of the hypoexponential approximation in such cases can result in large deviations from the true gamma-distributed model.
is of a more qualitative nature (Krylova & Earn, 2013) due to bifurcations. As we have shown in Fig. 6, using an Erlang instead of the hypoexponential approximation in such cases can result in large deviations from the true gamma-distributed model.
The Stan model code and a python script to simulate data and fit the model are available on https://github.com/lanl/gamma-dde.
6. Discussion
Gamma-distributed DDEs, such as (1.1), occur throughout mathematical biology. However, modellers often make simplifying assumptions due to the lack of appropriate numerical methods for infinite delay models. In this work, we developed an FCRK method to numerically simulate gamma-distributed DDEs, established order conditions on the numerical quadrature technique to ensure the accuracy of the method, proved the convergence of the FCRK method and illustrated our results with a series of test problems. Despite the development of an FCRK method to simulate (1.1) in this work, many software packages rely on ODE solvers to perform parameter fitting and statistical inference. Accordingly, we derived a finite dimensional approximation of the gamma-distributed DDE using a hypoexponential approximation and used numerical simulation to show that this hypoexponential approximation outperforms the common Erlang approximation. In particular, we demonstrated that using the Erlang approximation can lead to qualitatively different behaviour than the hypoexponential approximation and the true solution of the gamma-distributed DDE. Finally, we implemented our finite dimensional approximation in Stan (Carpenter et al., 2017) to fit synthetic data from a hypothetical epidemic.
The primary impediment towards the adaptation of FCRK methods to distributed DDEs with infinite delay is the accurate and consistent evaluation of the convolution integral (2.8). Here, we developed a change of variable that transforms the semi-infinite domain of integration to  This change of variables is parametrized by certain parameters
This change of variables is parametrized by certain parameters  and
and  , and we give conditions on
, and we give conditions on  and
and  to ensure that the transformed integrand is sufficiently smooth to implement standard quadrature rules in Lemma 2.1. These conditions, and thus the change of variable and FCRK method, apply to other delay distributions that decay exponentially. Accordingly, the FCRK method framework developed in this article should extend with minimal changes to other distributed DDEs with infinite delays.
to ensure that the transformed integrand is sufficiently smooth to implement standard quadrature rules in Lemma 2.1. These conditions, and thus the change of variable and FCRK method, apply to other delay distributions that decay exponentially. Accordingly, the FCRK method framework developed in this article should extend with minimal changes to other distributed DDEs with infinite delays.
Until such FCRK methods are implemented in common software packages such as Stan, it is useful to have accurate finite dimensional approximations of the distributed DDE (1.1). Many finite dimensional approximations have been developed recently. The hypoexponential approximation described in Section 3 offers a number of advantages over existing methods. While our analysis of the approximation error does not allow for an explicit expression of the error introduced by replacing the gamma distribution by either the Erlang or hypoexponential distribution, the calculation in Section 4.2 offers a heuristic explanation for why the hypoexponential distribution is more accurate than the common Erlang approximation. As our numerical simulations show, there are gamma-distributed DDE problems for which the hypoexponential method gives the correct qualitative behaviour, while the Erlang approximation exhibits incorrect asymptotic stability behaviour. Moreover, unlike existing algorithms to parametrize phase-type distributions that do not give explicit values for the parameters of the phase-type distribution, we explicitly derived the parameters of the hypoexponential distribution as a function of the mean and variance of the underlying gamma distribution. This explicit expression for the rates allows for simple implementation in software packages such as Stan and we showed how to implement a simple SIR model with a gamma-distributed duration of infection. This example explicitly showed how the hypoexponential approximation derived in Section 3 facilitates evidence synthesis that is necessary to identify important model parameters.
Our work represents a step towards relaxing the assumption of Erlang-distributed delays in, amongst many other applications, infectious disease epidemiology. The FCRK method developed in this work allows modellers to directly simulate a gamma-distributed DDE if precise numerical results are necessary, while the hypoexponential approximations offer a more accurate ODE representation of the underlying DDE than the common Erlang approximation without any increase in complexity. Accordingly, we have presented two distinct pathways to allow for the implementation of gamma-distributed DDEs and facilitate their use in mathematical biology or other fields of science.
A. Smoothness conditions for the FCRK method
In the main text, we derived sufficient conditions on the change of variable
 |
to ensure that the transformed convolution integral is sufficiently smooth to not introduce unnecessary error in the FCRK method. Here, we prove that these conditions are sufficient by giving the proof of Lemma 2.1.
We recall that  is the solution of the gamma-distributed DDE and
is the solution of the gamma-distributed DDE and  is the PDF of the gamma distribution with shape parameter
is the PDF of the gamma distribution with shape parameter  and rate parameter
and rate parameter  , and we are calculating
, and we are calculating
 |
We first show that the derivatives of  with respect to
with respect to  can be computed inductively.
can be computed inductively.
Lemma A.1.
Assume that
is
times differentiable and take
. Then,
where
is a constant depending only on
,
and
is an integer between
and
, inclusive.

Proof.
The proof is by induction on the order of the derivative
. The
case follows immediately from the definition of
, while the
st case comes from term by term differentiation with

We now must show that  is a bounded function of
is a bounded function of  on
on  . Take
. Take  and consider the compact interval
and consider the compact interval  away from
away from  ,
,  We note that
We note that  is a product of continuous functions, and thus continuous, so the image of this compact set is compact and thus bounded. Then, we consider the interval
is a product of continuous functions, and thus continuous, so the image of this compact set is compact and thus bounded. Then, we consider the interval  and define
and define
 |
for  . We note that, for
. We note that, for  and
and  ,
,  appears in the derivative of
appears in the derivative of  . Now,
. Now,  for
for  and we compute
and we compute
 |
Thus, for  sufficiently close to
sufficiently close to  and
and  , we have
, we have  and we can therefore bound
and we can therefore bound  from above as
from above as
 |
Now, we multiply by  so
so
 |
Then, as  we have
we have  Recalling that the weight parameter of the function space
Recalling that the weight parameter of the function space  satisfies
satisfies  , we set
, we set  and thus obtain
and thus obtain
 |
Then, as  we immediately see
we immediately see
 |
so  is bounded and it follows from the definition of the space
is bounded and it follows from the definition of the space  that
that
 |
for all  . We thus conclude that
. We thus conclude that
 |
It follows that  and thus the integrand
and thus the integrand  is bounded on the entire interval
is bounded on the entire interval  The condition
The condition  is crucial in the above calculation, as it implies that
is crucial in the above calculation, as it implies that  and leads to the result.
and leads to the result.
Lemma A.2.
Assume that
is
times differentiable and set
(A1) Then,
is
times differentiable in
for
. Furthermore, if the
th derivative of
,
, is bounded for
, then there exists
such that
for
.
Proof.
We recall that
so taking
ensures that
and
The bound of
follows from the boundedness of
demonstrated previously.
B. The smoothed hypoexponential approximation
Here, we give the proof of Theorem 3.2 that established the rates of smoothed hypoexponential approximation. As in the main text, let  denote the mean of a gamma-distributed random variable
denote the mean of a gamma-distributed random variable  , and let
, and let  denote the shape parameter, such that
denote the shape parameter, such that  has variance
has variance  . We write
. We write  for the rate parameter, and
for the rate parameter, and  for the smallest integer greater than
for the smallest integer greater than  . We recall the definition of the smoothed hypoexponentially distributed random variable
. We recall the definition of the smoothed hypoexponentially distributed random variable  with the same mean and variance as
with the same mean and variance as 
Theorem B.1.
Let
be a
-distributed random variable where
Consider the hypoexponentially distributed random variable
with rate parameters
. Recall that
as
, set
and define
and
by
(B1) Then,
and
have the same first two moments.
Proof. Proof of Theorem B.1 —
The mean of
and
are given by
and
because the square-roots in Eq (B1) cancel. Now using the fact that
, we indeed find that
. The variance of
is equal to
and the variance of
is given by
For any two numbers
and
, we have
. Hence, we find that
Therefore,
, which proves the theorem.



Remark B.1.
Notice that the values
and
are the roots of the quadratic polynomial
C. Convergence of the FCRK Method
Here, we demonstrate the convergence of the FCRK method described in Section 2 and prove Theorem 2.1. In the following analysis, we make extensive use of the results in Section 6 of Maset et al. (2005) and Section 7 of Bellen et al. (2009). We will also require the definitions of discrete and uniform order for FCRK methods (found in Definitions 2.3 and 2.2, respectively, and Definition 4.1 of Maset et al. (2005)).
To begin the analysis of our FCRK method, we transform the IVP (2.7) to an equivalent formulation that is simpler to analyse. In particular, we recall that, for all times  ,
,
 |
and  is a continuous function of
is a continuous function of  in the interval
in the interval  . We therefore define
. We therefore define
 |
The function  is therefore a uniformly continuous function of
is therefore a uniformly continuous function of  and agrees with
and agrees with  almost-everywhere in
almost-everywhere in  Therefore,
Therefore,
 |
and we can consider the transformed problem
 |
(C1) |
Now, we do not calculate the right-hand side of (C1) precisely but rather use a quadrature rule to approximate the integral as discussed in the main text. Maset et al. (2005) considered FCRK methods for the generalized setting of all such approximations of the right-hand side of (C1). Maset et al. (2005) denoted approximations of the right-hand side of (C1) with a tilde which, in our setting, gives
 |
where  is a parameter that controls the precision of the approximation. Here,
is a parameter that controls the precision of the approximation. Here,  represents the space of composite quadrature rules with a fixed number
represents the space of composite quadrature rules with a fixed number  of steps. These quadrature rules are defined by their weights,
of steps. These quadrature rules are defined by their weights,  , and collocation points,
, and collocation points,  . The quadrature rule is therefore represented by
. The quadrature rule is therefore represented by  with
with
 |
where  and
and  are the the step size and order of the quadrature method, respectively. Accordingly, the approximation of the right-hand side of (C1) is given by
are the the step size and order of the quadrature method, respectively. Accordingly, the approximation of the right-hand side of (C1) is given by
 |
(C2) |
For notational simplicity in the following, we denote, for a given function  ,
,
 |
The accuracy of the approximation  for a given function
for a given function  and quadrature rule
and quadrature rule  is given by
is given by
 |
(C3) |
Maset et al. (2005) derived conditions on the approximation  that permit convergence of existing FCRK methods. To establish the convergence of the FCRK method for the transformed problem (C1), the approximate function
that permit convergence of existing FCRK methods. To establish the convergence of the FCRK method for the transformed problem (C1), the approximate function  must satisfy the following conditions:
must satisfy the following conditions:
-
(1)
 is uniformly continuous with respect to
is uniformly continuous with respect to  and the derivative with respect to the function
and the derivative with respect to the function  ,
,  is continuous with respect to
is continuous with respect to  and uniformly bounded with respect to
and uniformly bounded with respect to  ;
; -
(2)
There exists a continuous function
 such that
such that  for all
for all  and
and  ;
; -
(3)
 is of class
is of class  with respect to
with respect to  for all
for all  and both the derivatives are bounded uniformly with respect to
and both the derivatives are bounded uniformly with respect to 
Furthermore, let  be the largest value
be the largest value  such that the IVP (1.1) has a unique solution with initial data
such that the IVP (1.1) has a unique solution with initial data  over the interval
over the interval  . Denote the simulation mesh by
. Denote the simulation mesh by
 |
with corresponding step size  . Finally, let the approximation of the solution
. Finally, let the approximation of the solution  obtained using a FCRK method with mesh
obtained using a FCRK method with mesh  given by
given by  . Then, recalling the definitions of uniform, discrete and global Order in Definitions 2.2–2.4, Maset et al. (2005) prove.
. Then, recalling the definitions of uniform, discrete and global Order in Definitions 2.2–2.4, Maset et al. (2005) prove.
Theorem C.1. Theorem 6.1 of Maset et al. (2005) —
If an FCRK method
of uniform order
, discrete order
, with
, and such that
, is applied to (C1) for the computation of
through
and the following assumptions hold:
- A:
for
and
for all
with
;
- B:
Conditions (1), (2) and (3) hold;
- C:
The approximation error (C3) satisfies
;
- D:
is 5 times continuously differentiable;
then for a fixed
, and simulation meshes
that include all possible discontinuity points of
in
. Then,

We note the relationship between the smoothness required of the solution  and the maximal discrete and uniform orders for the FCRK method.
and the maximal discrete and uniform orders for the FCRK method.
C.1 Applying Theorem (C.1) to the FCRK method
We now show that Theorem C.1 is applicable to the FCRK method derived in Section 2. Bellen et al. (2009) show that the global fourth-order explicit method considered in this work has uniform order 3 and discrete order 4 and simple inspection shows that (2.4) satisfies Assumption A. Next, we show that our approximation  satisfies the conditions (1), (2) and (3) and so verify Assumption B.
satisfies the conditions (1), (2) and (3) and so verify Assumption B.
In what follows, we consider arbitrary functions  Furthermore, we only consider quadrature rules with bounded weights
Furthermore, we only consider quadrature rules with bounded weights
 |
(C4) |
for fixed  . Finally, we assume that the function
. Finally, we assume that the function  is at least
is at least  times continuously differentiable and globally Lipschitz. The solution
times continuously differentiable and globally Lipschitz. The solution  is thus
is thus  times differentiable for
times differentiable for  . Thus, Assumption D is satisfied. Furthermore, we assume that
. Thus, Assumption D is satisfied. Furthermore, we assume that  and
and  are bounded for
are bounded for  .
.
C.1.1 Verifying condition (1)
We begin with condition (1). Now,  is Lipschitz and thus uniformly continuous. Therefore, for each
is Lipschitz and thus uniformly continuous. Therefore, for each  there exists
there exists  such that for all
such that for all  ,
,  . Then, it follows from the definition (C2), the uniform continuity of
. Then, it follows from the definition (C2), the uniform continuity of  with respect to
with respect to  is equivalent to showing that we can choose
is equivalent to showing that we can choose  such that if the quadrature rules satisfy
such that if the quadrature rules satisfy  then the quadrature method is such that
then the quadrature method is such that
 |
This relationship, combined with the uniform continuity of  , will establish the uniform continuity of
, will establish the uniform continuity of  with respect to
with respect to  . We now show how to choose such a
. We now show how to choose such a  By adding 0 to the above expression, we obtain
By adding 0 to the above expression, we obtain
 |
Now,  is uniformly continuous and the the sum of the weights
is uniformly continuous and the the sum of the weights  is bounded above by
is bounded above by  . From the uniform continuity of
. From the uniform continuity of  , we can choose
, we can choose  , independently of
, independently of  and
and  , such that if
, such that if  , so that
, so that  then
then
 |
Therefore, we obtain
 |
Furthermore,  is the product of bounded functions and thus bounded above. Let this upper bound be given by
is the product of bounded functions and thus bounded above. Let this upper bound be given by  and note that it is independent of the quadrature rule used. Accordingly, it is possible to constrain
and note that it is independent of the quadrature rule used. Accordingly, it is possible to constrain  so that the weights of the quadrature rule satisfy
so that the weights of the quadrature rule satisfy
 |
It thus follows that
 |
Therefore, independently of the quadrature rule  , taking
, taking
 |
is sufficient to ensure that
 |
As  was chosen from the uniform continuity of the function
was chosen from the uniform continuity of the function  , it thus follows that
, it thus follows that  is uniformly continuous in
is uniformly continuous in  as desired.
as desired.
Furthermore,  is continuously differentiable and the mapping
is continuously differentiable and the mapping
 |
is linear, and thus differentiable with respect to  The chain rule for Fréchet derivatives gives
The chain rule for Fréchet derivatives gives
 |
which is continuous with respect to  and bounded with respect to
and bounded with respect to  by virtue of the bound on the quadrature weights (C4). The condition (1) is therefore satisfied.
by virtue of the bound on the quadrature weights (C4). The condition (1) is therefore satisfied.
C.1.2 Verifying condition (2)
We turn now to the second condition. From the definition of  we immediately see that
we immediately see that
 |
where  is the step size of the
is the step size of the  th order quadrature method
th order quadrature method  and
and  is a known error term from the Taylor expansion of
is a known error term from the Taylor expansion of  . Recalling that
. Recalling that  is assumed to be bounded, we obtain
is assumed to be bounded, we obtain
 |
which gives
 |
It is clear that  is a continuous function and satisfies condition (2).
is a continuous function and satisfies condition (2).
C.1.3 Verifying condition (3)
It remains to show that  is
is  with respect to
with respect to  for all
for all  Now,
Now,  is 4 times continuously differentiable and
is 4 times continuously differentiable and  is linear in
is linear in  Therefore, consecutive applications of the chain rule for Fréchet derivatives gives the required regularity of
Therefore, consecutive applications of the chain rule for Fréchet derivatives gives the required regularity of  . Furthermore, the quadrature weights
. Furthermore, the quadrature weights  satisfy (C4) and we have assumed that
satisfy (C4) and we have assumed that  for
for  is bounded. Therefore, Lemma A.2 yields the uniform boundedness of
is bounded. Therefore, Lemma A.2 yields the uniform boundedness of  for
for  with respect to
with respect to  , as required.
, as required.
C.1.4 Characterization of the accuracy of the approximation of 
We now consider the approximation error defined in (C3) and show that Assumption C holds. To calculate  in the FCRK method defined in Section 2, we considered composite quadrature rules
in the FCRK method defined in Section 2, we considered composite quadrature rules  of order
of order  with maximal step-size
with maximal step-size  . Such quadrature rules satisfy
. Such quadrature rules satisfy
 |
Then, Taylor expanding the latter expression in (C2) gives
 |
The boundedness of  gives
gives  In Section 2, we chose
In Section 2, we chose  such that
such that  . It follows that the FCRK method (2.4) satisfies Assumption C.
. It follows that the FCRK method (2.4) satisfies Assumption C.
C.2 A convergence result for the FCRK method
Assumption A of Theorem C.1 is satisfied for the the fourth-order explicit FCRK method defined in (2.4) with uniform order  and discrete order
and discrete order  . We have shown that both Assumptions B and C hold, while the assumption that
. We have shown that both Assumptions B and C hold, while the assumption that  is 4 times continuously differentiable ensures that Assumption D holds. We thus conclude
is 4 times continuously differentiable ensures that Assumption D holds. We thus conclude
Theorem C.2.
Assume that the right-hand side of (1.1) is 4 times continuously differentiable and let
be the explicit FCRK method with global fourth-order defined in (2.4). Furthermore, let the simulation mesh
include all breaking points of the DDE (1.1) and have maximal stepsize
. Let the quadrature method
be given by the composite Simpson’s open rule with maximal sub-interval size of
.
Then, the error between the solution,
of (1.1) and the numerical approximation of the solution,
, satisfies
Contributor Information
Tyler Cassidy, Theoretical Biology and Biophysics, Los Alamos National Laboratory, Los Alamos, NM 87545, USA.
Peter Gillich, Department of Mathematics and Statistics, McGill University, Montreal, Quebec 3A 0G4, Canada.
Antony R Humphries, Departments of Mathematics and Statistics, and Physiology, McGill University, Montreal, Quebec 3A 0G4, Canada.
Christiaan H van Dorp, Theoretical Biology and Biophysics, Los Alamos National Laboratory, Los Alamos, NM 87545, USA.
Funding
National Institutes of Health (R01-OD011095 supported C.H.v.D., T.C., R01-AI116868 supported T.C.); National Science and Engineering Research Council of Canada (RGPIN-2018-05062 to A.R.H.); National Science and Engineering Research Council Undergraduate Student Research Award to P.G. US Department of Energy (contract no. 89233218CBA000001) supported C.H.v.D and T.C..
Bibliography
- Andò, A., Breda, D. & Gava, G. (2020) How fast is the linear chain trick? A rigorous analysis in the context of behavioral epidemiology. Math. Biosci. Eng., 17, 5059–5084. [DOI] [PubMed] [Google Scholar]
- Beauchemin, C. A., Miura, T. & Iwami, S. (2017) Duration of SHIV production by infected cells is not exponentially distributed: Implications for estimates of infection parameters and antiviral efficacy. Sci. Rep., 7, 42765. 10.1038/srep42765. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Bellen, A., Maset, S., Zennaro, M. & Guglielmi, N. (2009) Recent Trends in the Numerical Solution of Retarded Functional Differential Equations. Acta Numerica, 18, 1–110. [Google Scholar]
- Bellen, A. & Zennaro, M. (2013) Numerical Methods for Delay Differential Equations, 1st edn. Oxford: Oxford University Press. [Google Scholar]
- Bobbio, A., Horváth, A. & Telek, M. (2005) Matching three moments with minimal acyclic phase type distributions. Stoch. Model., 21, 303–326. [Google Scholar]
- Breda, D., Diekmann, O., Gyllenberg, M., Scarabel, F. & Vermiglio, R. (2016) Pseudospectral discretization of nonlinear delay equations: new prospects for numerical bifurcation analysis. SIAM J. Appl. Dyn. Syst., 15, 1–23. [Google Scholar]
- Câmara De Souza, D., Craig, M., Cassidy, T., Li, J., Nekka, F., Bélair, J. & Humphries, A. R. (2018) Transit and lifespan in neutrophil production: implications for drug intervention. J. Pharmacokinet. Pharmacodyn., 45, 59–77. [DOI] [PubMed] [Google Scholar]
- Campbell, S. A. & Jessop, R. (2009) Approximating the Stability Region for a Differential Equation with a Distributed Delay. Math. Model. Nat. Phenom., 4, 1–27. [Google Scholar]
- Carpenter, B., Gelman, A., Hoffman, M., Lee, D., Goodrich, B., Betancourt, M., Brubaker, M., Guo, J., Li, P. & Riddell, A. (2017) Stan: a probabilistic programming language. J. Stat. Softw., 76, 1–32. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Cassidy, T. (2021) Distributed delay differential equation representations of cyclic differential equations. SIAM J. Appl. Math., 81, 1742–1766. [Google Scholar]
- Cassidy, T. & Craig, M. (2019) Determinants of combination GM-CSF immunotherapy and oncolytic virotherapy success identified through in silico treatment personalization. PLOS Comput. Biol., 15, e1007495. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Cassidy, T., Craig, M. & Humphries, A. R. (2019) Equivalences between age structured models and state dependent distributed delay differential equations. Math. Biosci. Eng., 16, 5419–5450. [DOI] [PubMed] [Google Scholar]
- Cassidy, T. & Humphries, A. R. (2019) A mathematical model of viral oncology as an immuno-oncology instigator. Math. Med. Biol. A J. IMA, 37, 117–151. [DOI] [PubMed] [Google Scholar]
- Champredon, D., Dushoff, J. & Earn, D. J. D. (2018) Equivalence of the Erlang-distributed SEIR epidemic model and the renewal equation. SIAM J. Appl. Math., 78, 3258–3278. [Google Scholar]
- Cryer, C. W. & Tavernini, L. (1972) The numerical solution of Volterra functional differential equations by Euler’s method. SIAM J. Numer. Anal., 9, 105–129. [Google Scholar]
- Diekmann, O. & Gyllenberg, M. (2012) Equations with infinite delay: blending the abstract and the concrete. J. Differ. Equ., 252, 819–851. [Google Scholar]
- Diekmann, O., Gyllenberg, M. & Metz, J. A. J. (2018) Finite dimensional state representation of linear and nonlinear delay systems. J. Dyn. Differ. Equations, 30, 1439–1467. [Google Scholar]
- Diekmann, O., Gyllenberg, M. & Metz, J. A. J. (2020a) Finite dimensional state representation of physiologically structured populations. J. Math. Biol., 80, 205–273. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Diekmann, O., Heesterbeek, H. & Britton, T. (2012) Mathematical Tools for Understanding Infectious Disease Dynamics. Princeton University Press. [Google Scholar]
- Diekmann, O., Scarabel, F. & Vermiglio, R. (2020b) Pseudospectral discretization of delay differential equations in sun-star formulation: Results and conjectures. Discret. Contin. Dyn. Syst. - S, 13, 2575–2602. [Google Scholar]
- Enright, W. H. and Hayashi, H. (1997). A delay differential equation solver based on a continuous Runge-Kutta method with defect control. Numer. Algorithms, 16(3–4):349. [Google Scholar]
- Eremin, A. (2016) Functional continuous Runge-Kutta-Nyström methods. Electron. J. Qual. Theory Differ. Equ., Proc. 10'th Coll. Qualitative Theory of Diff. Equ. (July 1–4, 2015, Szeged, Hungary) Ed. by T. Krisztin. SZTE: Szeged. Bolyai Institute, No. 11, pp. 1–17. 10.14232/ejqtde.2016.8.11. [DOI] [Google Scholar]
- Eremin, A. S. (2019) Runge-Kutta methods for differential equations with distributed delays. AIP Conf. Proc, vol. 2116, p. 140003. [Google Scholar]
- Eremin, A. S., Humphries, A. R. & Lobaskin, A. A. (2020) Some issues with the numerical treatment of delay differential equations. Int. Conf. Numer. Anal. Appl. Math. Icnaam 2019, vol. 2293, p. 100003. [Google Scholar]
- Gossel, G., Hogan, T., Cownden, D., Seddon, B. & Yates, A. J. (2017) Memory CD4 T cell subsets are kinetically heterogeneous and replenished from naive T cells at high levels. Elife, 6, 1–30. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Greenhalgh, S. & Rozins, C. (2021) A generalized differential equation compartmental model of infectious disease transmission. Infect Dis Model, 6, 1073–1091. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Gyllenberg, M., Scarabel, F. & Vermiglio, R. (2018) Equations with infinite delay: Numerical bifurcation analysis via pseudospectral discretization. Appl. Math. Comput., 333, 490–505. [Google Scholar]
- Hale, J. K. (1974) Functional differential equations with infinite delays. J. Math. Anal. Appl., 48, 276–283. [Google Scholar]
- Hale, J. K. & Verduyn Lunel, S. M. (1993) Introduction to Functional Differential Equations. Applied Mathematical Sciences (F. John, J.E. Marsden & L. Sirovich eds), vol. 99. New York, NY: Springer. [Google Scholar]
- Hino, Y., Murakami, S. & Naito, T. (1991) Functional Differential Equations with Infinite Delay. Lecture Notes in Mathematics (A Dold, B. Eckmann & F. Takens eds), vol. 1473. Berlin Heidelberg, Berlin, Heidelberg: Springer. [Google Scholar]
- Hu, S., Dunlavey, M., Guzy, S. & Teuscher, N. (2018) A distributed delay approach for modeling delayed outcomes in pharmacokinetics and pharmacodynamics studies. J. Pharmacokinet. Pharmacodyn., 45, 1–24. [DOI] [PubMed] [Google Scholar]
- Hurtado, P. & Richards, C. (2020) Time is of the essence: incorporating phase-type distributed delays and dwell times into ODE models. Math. Appl. Sci. Eng., 1, 410–422. [Google Scholar]
- Hurtado, P. J. & Kirosingh, A. S. (2019) Generalizations of the ‘Linear Chain Trick’: incorporating more flexible dwell time distributions into mean field ODE models. J. Math. Biol., 79, 1831–1883. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Jenner, A. L., Cassidy, T., Belaid, K., Bourgeois-Daigneault, M.-C. & Craig, M. (2021) In silico trials predict that combination strategies for enhancing vesicular stomatitis oncolytic virus are determined by tumor aggressivity. J. Immunother. Cancer, 9, e001387. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Jessop, R. & Campbell, S. (2010) Approximating the stability region of a neural network with a general distribution of delays. Neural Networks, 23, 1187–1201. [DOI] [PubMed] [Google Scholar]
- Johnson, M. A. & Taaffe, M. R. (1989) Matching moments to phase distributions: mixtures of erlang distributions of common order. Commun. Stat. Stoch. Model., 5, 711–743. [Google Scholar]
- Johnson, M. A. & Taaffe, M. R. (1990) Matching moments to phase distributions: density function shapes. Commun. Stat. Stoch. Model., 6, 283–306. [Google Scholar]
- Koch, G. & Schropp, J. (2015) Distributed transit compartments for arbitrary lifespan distributions in aging populations. J. Theor. Biol., 380, 550–558. [DOI] [PubMed] [Google Scholar]
- Krylova, O. & Earn, D. J. (2013) Effects of the infectious period distribution on predicted transitions in childhood disease dynamics. J R Soc Interface, 10, 20130098. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Krzyzanski, W. (2019) Ordinary differential equation approximation of gamma distributed delay model. J. Pharmacokinet. Pharmacodyn., 46, 53–63. [DOI] [PubMed] [Google Scholar]
- Langlois, G. P., Craig, M., Humphries, A. R., Mackey, M. C., Mahaffy, J. M., Bélair, J., Moulin, T., Sinclair, S. R. & Wang, L. (2017) Normal and pathological dynamics of platelets in humans. J. Math. Biol., 75, 1411–1462. [DOI] [PubMed] [Google Scholar]
- Lixoft (2019) Monolix version 2019R2. Lixoft SAS: Antony; France. http://lixoft.com/products/monolix. [Google Scholar]
- MacDonald, N. (1978) Time Lags in Biological Models, 1st edn. Berlin: Springer. [Google Scholar]
- Maset, S., Torelli, L. & Vermiglio, R. (2005) Runge-Kutta Methods for Retarded Functional Differential Equations. Math. Model. Methods Appl. Sci., 15, 1203–1251. [Google Scholar]
- MATLAB (2017) R2017a. Natick, MA: The MathWorks Inc. [Google Scholar]
- Osogami, T. & Harchol-Balter, M. (2006) Closed form solutions for mapping general distributions to quasi-minimal PH distributions. Perform. Eval., 63, 524–552. [Google Scholar]
- Raue, A., Karlsson, J., Saccomani, M. P., Jirstrand, M. & Timmer, J. (2014) Comparison of approaches for parameter identifiability analysis of biological systems. Bioinformatics, 30, 1440–1448. [DOI] [PubMed] [Google Scholar]
- Raue, A., Kreutz, C., Maiwald, T., Bachmann, J., Schilling, M., Klingmüller, U. & Timmer, J. (2009) Structural and practical identifiability analysis of partially observed dynamical models by exploiting the profile likelihood. Bioinformatics, 25, 1923–1929. [DOI] [PubMed] [Google Scholar]
- Roberts, M. G. & Heesterbeek, J. A. (2007) Model-consistent estimation of the basic reproduction number from the incidence of an emerging infection. J. Math. Biol., 55, 803–816. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Rozhnova, G., van Dorp, C. H., Bruijning-Verhagen, P., Bootsma, M. C. J., van de Wijgert, J. H. H. M., Bonten, M. J. M. & Kretzschmar, M. E. (2021) Model-based evaluation of school- and non-school-related measures to control the covid-19 pandemic. Nat. Commun., 12, 1614. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Sanche, S., Lin, Y. T., Xu, C., Romero-Severson, E., Hengartner, N. & Ke, R. (2020) High contagiousness and rapid spread of severe acute respiratory syndrome coronavirus 2. Emerg. Infect. Dis., 26, 1470–1477. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Smith, H. (2011) An introduction to delay differential equations with applications to the life sciences. Texts in Applied Mathematics (J.E. Marsden, L. Sirovich & S.S. Antman eds), vol. 57. New York, NY: Springer. [Google Scholar]
- Svensson, Å. (2007) A note on generation times in epidemic models. Math. Biosci., 208, 300–311. [DOI] [PubMed] [Google Scholar]
- Tavernini, L. (1971) One-Step Methods for the Numerical Solution of Volterra Functional Differential Equations. SIAM J. Numer. Anal., 8, 786–795. [Google Scholar]
- Vehtari, A., Gelman, A. & Gabry, J. (2017) Practical bayesian evaluation using leave-one-out cross-validation and waic. Statist. Comput., 27, 1413–1432. [Google Scholar]
- Vermiglio, R. (1988) Natural Continuous Extensions of Runge-Kutta methods for Volterra integrodifferential equations. Numer. Math., 53, 439–458. [Google Scholar]
- Vogel, T. (1961) Systèmes Déferlants, Systèmes Héréditaires, Systèmes Dynamiques. Proc. Int. Symp. Nonlinear Vib. Kiev: Academy of Sciences USSR, pp. 123–130. https://iutam.org/wp-content/uploads/2016/04/IUTAM_1961.pdf. [Google Scholar]