

Abstract
目的
比较“天玑”骨科机器人辅助下与C臂X线机透视下徒手经椎弓根行经皮椎体后凸成形术(percutaneous kyphoplasty,PKP)治疗胸椎骨质疏松性椎体压缩骨折(osteoporotic vertebral compression fracture,OVCF)的疗效。
方法
回顾分析2020年1月—2023年3月收治且符合选择标准的85例胸椎OVCF患者临床资料,其中40例(50个椎体)于“天玑”骨科机器人辅助下穿刺行PKP(A组),45例(50个椎体)于C臂X线机透视下徒手穿刺行PKP(B组)。两组患者性别、年龄、身体质量指数、骨密度T值、骨折节段、外伤史及术前数字疼痛评分(NRS)、Oswestry功能障碍指数(ODI)、伤椎Cobb角等基线资料比较差异均无统计学意义(P>0.05)。收集并比较两组疗效评价指标,包括手术时间、骨水泥注入量、透射次数、住院时间及术后并发症发生情况。术后1 d复查伤椎正侧位X线片及CT,观察是否有骨水泥渗漏,评估伤椎内骨水泥分布情况。手术前后采用NRS评分评估疼痛情况,ODI评估机体功能障碍情况,摄X线片测量伤椎Cobb角评估椎体高度恢复情况。
结果
两组患者均顺利完成手术,A组手术时间、骨水泥用量、透射次数及住院时间均少于B组(P<0.05)。两组患者均获随访,随访时间4~12个月,平均9.6个月。A、B组术后分别有5、15个椎体发生骨水泥渗漏,均渗漏至椎间隙和椎体周围,患者无明显临床症状,两组骨水泥渗漏发生情况比较差异有统计学意义(P<0.05)。两组术后均未出现椎管内渗漏、感染、血管栓塞等严重并发症。A组术后1 d骨水泥分布指数多为Ⅴ级,弥散较好;B组以Ⅱ级和Ⅴ级居多;两组骨水泥分布指数比较差异有统计学意义(P<0.05)。两组术后1 d NRS评分、ODI及伤椎Cobb角均较术前显著改善(P<0.05);两组间上述指标手术前后差值比较差异均无统计学意义(P>0.05)。
结论
“天玑”骨科机器人辅助下经椎弓根行PKP治疗胸椎OVCF安全有效,可减少术中透射次数、缩短手术时间、减少骨水泥注入量、降低骨水泥渗漏发生。
Keywords: 胸椎, 骨质疏松性椎体压缩骨折, 经皮椎体后凸成形术, “天玑”骨科机器人
Abstract
Objective
To compare the effectiveness of TiRobot-assisted and C-arm X-ray fluoroscopy assisted percutaneous kyphoplasty (PKP) via pedicle of vertebra in the treatment of osteoporotic vertebral compression fracture (OVCF) of thoracic vertebrae.
Methods
The clinical data of 85 patients with OVCF of thoracic vertebrae who were admitted between January 2020 and March 2023 and met the selection criteria was retrospectively analyzed including 40 patients (50 vertebrae) undergoing PKP assisted by TiRobot (group A) and 45 patients (50 vertebrae) undergoing PKP assisted by C-arm X-ray fluoroscopy (group B). There was no significant difference in the comparison of baseline data such as gender, age, body mass index, bone mineral density T-value, fracture segment, trauma history, and preoperative numerical rating scale (NRS) score, Oswestry disability index (ODI), and Cobb angle of injured vertebra between the two groups (P>0.05). The effectiveness evaluation indexes of the two groups, including the operation time, the volume of injected cement, the times of fluoroscopies, the length of hospital stay, and the occurrence of postoperative complications were collected and compared. Anteroposterior and lateral X-ray films and CT of the injured vertebra were reviewed at 1 day after operation to observe whether there was cement leakage and to evaluate the distribution of cement in the injured vertebra. Before and after operation, pain was assessed using the NRS score, dysfunction was assessed using the ODI, and vertebral height recovery was assessed by measuring the Cobb angle of the injured vertebrae by X-ray films.
Results
Both groups of patients successfully completed the operation, the operation time, the volume of injected cement, the times of fluoroscopies, and the length of hospital stay in group A were significantly less than those in group B (P<0.05). The patients in two groups were followed up 4-12 months (mean, 9.6 months). Bone cement leakage occurred in 5 vertebrae in group A and 15 vertebrae in group B after operation, all of which leaked to the intervertebral space and around the vertebral body, and the patients had no obvious clinical symptoms. The difference of bone cement leakage between the two groups was significant (P<0.05). No severe complication such as intraspinal leakage, infection, or vascular embolism was found in the two groups. At 1 day after operation, the distribution index of bone cement in group A was mostly grade Ⅴ, which was well dispersed; while in group B, it was mostly grade Ⅱ and grade Ⅴ; the difference of bone cement distribution index between the two groups was significant (P<0.05). The NRS score, ODI, and Cobb angle of injured vertebra in both groups were significantly improved at 1 day after operation when compared with preoperative ones (P<0.05). There was no significant difference in the difference of the above indexes between the two groups before and after operation (P>0.05).
Conclusion
TiRobot-assisted unilateral PKP in the treatment of OVCF of thoracic vertebrae is safe and effective, which can reduce the X-ray transmission times during operation, shorten the operation time, reduce the volume of bone cement injection, and thus decrease incidence of bone cement leakage.
Keywords: Thoracic vertebra, osteoporotic vertebral compression fracture, percutaneous kyphoplasty, TiRobot
骨质疏松性椎体压缩骨折(osteoporotic vertebral compression fracture,OVCF)是脊柱外科常见疾病,致残率和死亡率较高,严重影响老年人生活质量[1-2]。经皮椎体后凸成形术(percutaneous kyphoplasty,PKP)是目前临床治疗OVCF较常用的微创手术,在缓解患者疼痛、恢复脊柱功能和重建脊柱稳定性方面具有较大优势[3-4]。胸椎周围毗邻肺、血管等重要脏器,胸椎椎弓根个体间差异较大,宽度较腰椎更窄,其内壁与硬膜囊紧密相贴,在行胸椎PKP时允许的操作误差范围很小,极大增加了手术风险与难度[5-6]。
由北京积水潭医院与北京天智航医疗科技股份有限公司合作研发的“天玑”骨科机器人可直接进行手术路径规划,检测患者呼吸运动和器械偏差,提高手术精确度,在临床得以广泛应用[7]。胸椎周围组织结构复杂,传统X线辅助下经椎弓根入路容易造成周围血管神经损伤、骨水泥渗漏等不良事件,影响手术效果[6]。经椎弓根外侧肋横突关节入路,术后骨水泥弥散效果好、渗漏风险低,路径更安全,但存在操作复杂、掌握困难、手术时间长等不足[8]。现已有不少研究证实机器人辅助下经椎弓根外侧入路可提高手术治疗效果,降低骨水泥渗漏等风险[9]。但对于机器人辅助下经椎弓根穿刺入路治疗效果的相关报道较少。现回顾分析德阳市人民医院采用徒手和“天玑”骨科机器人辅助经椎弓根行PKP治疗胸椎OVCF的疗效,为临床治疗提供参考。报告如下。
1. 临床资料
1.1. 一般资料
纳入标准:① 无高能量外伤史,年龄≥60岁;② T5~T12 OVCF,于“天玑”骨科机器人辅助下或C臂X线机透视下穿刺行PKP治疗;③ 伤椎所对应周围皮肤组织压痛、叩击痛阳性,体位改变或吸气时疼痛加重;④ 侧位X线片示伤椎上、下正常椎体高度丢失<50%,CT或MRI示新鲜单纯压缩骨折信号改变;⑤ 骨密度T值≤−2.5SD;⑥ 临床资料完整。排除标准:① 有椎体内骨折块向椎管内突出等合并脊髓受压症状者;② 可疑良、恶性肿瘤或感染等其他因素导致的非单纯OVCF者;③ 全身状况差或因内科疾病无法耐受手术者。
2020年1月—2023年3月,德阳市人民医院共85例患者符合选择标准纳入研究。其中40例(50个椎体)于“天玑”骨科机器人辅助下穿刺行PKP(A组),45例(50个椎体)于C臂X线机透视下徒手穿刺行PKP(B组)。两组患者性别、年龄、身体质量指数(body mass index,BMI)、骨密度T值、骨折节段、外伤史及术前数字疼痛评分(NRS)、Oswestry功能障碍指数(ODI)、伤椎Cobb角等基线资料比较差异均无统计学意义(P>0.05),具有可比性。见表1。其中A组单椎体骨折30例、相邻双椎体骨折6例、非相邻双椎体骨折4例,B组分别为40、3、2例。
表 1.
Comparison of baseline data between the two groups
两组患者基线资料比较
| 基线资料 Baseline data |
A组 Group A |
B组 Group B |
统计量 Statistical value |
P值 P value |
| 性别(男/女,例) | 11/29 | 13/32 | χ2=0.020 | 0.887 |
年龄( ,岁) ,岁) |
75.2±8.8 | 75.5±8.9 | t=0.005 | 0.945 |
BMI( ,kg/m2) ,kg/m2) |
22.3±3.4 | 22.2±3.5 | t=0.084 | 0.773 |
| 骨折节段(T5/T6/T7/T8/T9/T10/T11,例) | 2/3/7/6/7/3/10/12 | 3/2/9/5/5/4/11/11 | χ2=1.308 | 0.988 |
骨密度T值( ,SD) ,SD) |
−3.5±0.6 | −3.6±0.5 | t=0.009 | 0.926 |
| 外伤史(有/无,例) | 5/35 | 7/38 | χ2=0.163 | 0.686 |
术前NRS评分( ,分) ,分) |
6.8±0.9 | 6.7±1.0 | t=0.003 | 0.959 |
术前ODI( ,%) ,%) |
66.9±1.9 | 67.3±3.2 | t=3.381 | 0.069 |
术前Cobb角( ,°) ,°) |
20.3±2.6 | 20.6±3.1 | t=0.512 | 0.610 |
1.2. 手术方法
手术均由2位高年资脊柱骨科医师(均独立完成C臂X线机透视下PKP手术100例以上)主刀完成。两组手术均采用经椎弓根单侧穿刺入路。“天玑”第2代骨科机器人(S-0367)由北京天智航医疗科技股份有限公司提供;骨水泥套装(批号:AB9930)、椎体成形导向器(批号:FG2500)等由上海凯利泰医疗科技股份有限公司提供。
A组:患者于全身麻醉下取俯卧位,常规消毒铺巾,C臂X线机透视定位目标椎体椎弓根外上象限,作为预计穿刺点。将示踪器参考架放置于预计穿刺点上方,利用缝线及聚维酮碘薄膜胶布牢固固定于背部皮肤表面,对伤椎及上、下椎体行三维扫描。将图像数据传入“天玑”骨科机器人系统,利用配套软件进行术前路径规划。在机器人辅助定位后,向系统发出指令,使机械臂到达指定位置;将穿刺针刺入皮肤直达伤椎椎弓根后方骨皮质,尖刀破皮,开口后使用电钻将穿刺针经椎弓根钻入,直达椎体中份;C臂X线机透视椎体正侧位,确认穿刺针位置准确。取出穿刺针,插入导针及工作通道,将注有碘海醇造影剂的扩张球囊置入椎体中份进行扩张,C臂X线机透视确认椎体高度恢复。配置聚甲基丙烯酸甲酯骨水泥,取出扩张球囊,待骨水泥呈拉丝状时通过专用注射器向椎体内推入骨水泥,每注射约1 mL行伤椎正侧位X线透视1次,观察其在椎体内分布情况。当正侧位透视下伤椎骨水泥填充椎体中央、椎体周围无明显溢出时,拔出注射器,局部压迫止血,消毒皮肤后缝合切口。
B组:患者体位同A组,C臂X线机透视下定位伤椎穿刺点行体表标记,逐层麻醉后尖刀破皮,穿入穿刺针。正侧位X线透视使正位下穿刺针位于椎弓根内,不刺破内外缘骨皮质;侧位下穿刺针尖至椎体后缘,保证继续进针可到达椎体中份;穿刺过程中不断调整进针角度,建立良好穿刺通道。其余操作同A组。
1.3. 术后处理及疗效评价指标
术后2 h嘱患者在家属陪同下下床活动;术后1 d开始给予抗骨质疏松药物治疗。术后1、3、6、12个月复查摄正侧位X线片,指导功能锻炼,若疼痛加重或怀疑发生新鲜骨折,则行MRI检查。
记录并比较两组手术时间(A、B组分别以麻醉开始和C臂X线机透视下行体表定位为手术开始时间,均以关闭手术切口为结束时间)、骨水泥注入量、透射次数、住院时间及术后并发症发生情况。术后1 d复查伤椎正侧位X线片及CT,评估伤椎内骨水泥分布情况(采用骨水泥分布指数[10]评估)及有无骨水泥渗漏。手术前后采用NRS评分评估疼痛情况,ODI评估机体功能障碍情况,摄X线片测量伤椎Cobb角评估椎体高度恢复情况。
1.4. 统计学方法
采用SPSS26.0统计软件进行分析。计量资料经Shapiro-Wilktest正态性检验,均符合正态分布,数据以均数±标准差表示,组间比较采用独立样本t检验,组内手术前后比较采用配对t检验;计数资料比较采用χ2检验;等级资料比较采用秩和检验。检验水准α=0.05。
2. 结果
两组患者均顺利完成手术,A组手术时间、骨水泥注入量、透射次数及住院时间均少于B组,差异有统计学意义(P<0.05)。两组患者均获随访,随访时间4~12个月,平均9.6个月。A、B组术后分别有5、15个椎体发生骨水泥渗漏,均渗漏至椎间隙和椎体周围,患者无明显临床症状,两组骨水泥渗漏发生情况比较差异有统计学意义(P<0.05)。两组术后均未出现椎管内渗漏、感染、血管栓塞等并发症。A组术后1 d骨水泥分布指数多为Ⅴ级,弥散较好;B组Ⅱ级和Ⅴ级居多;两组骨水泥分布指数比较差异有统计学意义(P<0.05)。两组术后1 d NRS评分、ODI及伤椎Cobb角均较术前显著改善,差异有统计学意义(P<0.05);两组间上述指标手术前后差值比较差异均无统计学意义(P>0.05)。见表2,图1。
表 2.
Comparison of outcome indicators between the two groups
两组患者结局指标比较
| 结局指标 Outcome indicator |
A组 Group A |
B组 Group B |
效应值(95%CI) Effect value (95%CI) |
P值 P value |
手术时间( ,min) ,min) |
41.0±2.2 | 52.9±1.6 | MD=−11.838(−12.593,−11.083) | <0.001 |
骨水泥注入量( ,mL) ,mL) |
3.1±0.8 | 3.6±1.1 | MD=−0.529(−0.920,−0.138) | 0.009 |
透射次数( ,次) ,次) |
11.1±2.4 | 14.8±3.4 | MD=−3.660(−4.836,−2.484) | <0.001 |
住院时间( ,d) ,d) |
4.6±1.5 | 5.8±1.7 | MD=−1.200(−1.831,−0.569) | <0.001 |
| 骨水泥渗漏(是/否,例) | 5/45 | 15/35 | OR=0.259(0.097,0.778) | 0.012 |
NRS评分手术前后差值( ,分) ,分) |
4.3±0.9 | 4.3±1.2 | MD=−0.080(−0.494,0.334) | 0.703 |
ODI手术前后差值( ,%) ,%) |
32.6±2.4 | 32.4±3.3 | MD=−0.180(−1.317,0.957) | 0.754 |
Cobb角手术前后差值( ,°) ,°) |
9.5±2.8 | 10.0±2.3 | MD=−0.513(−1.532,0.507) | 0.321 |
| 骨水泥分布指数(Ⅰ/Ⅱ/Ⅲ/Ⅳ/Ⅴ,例) | 0/7/4/1/38 | 3/20/3/5/19 | − | 0.001 |
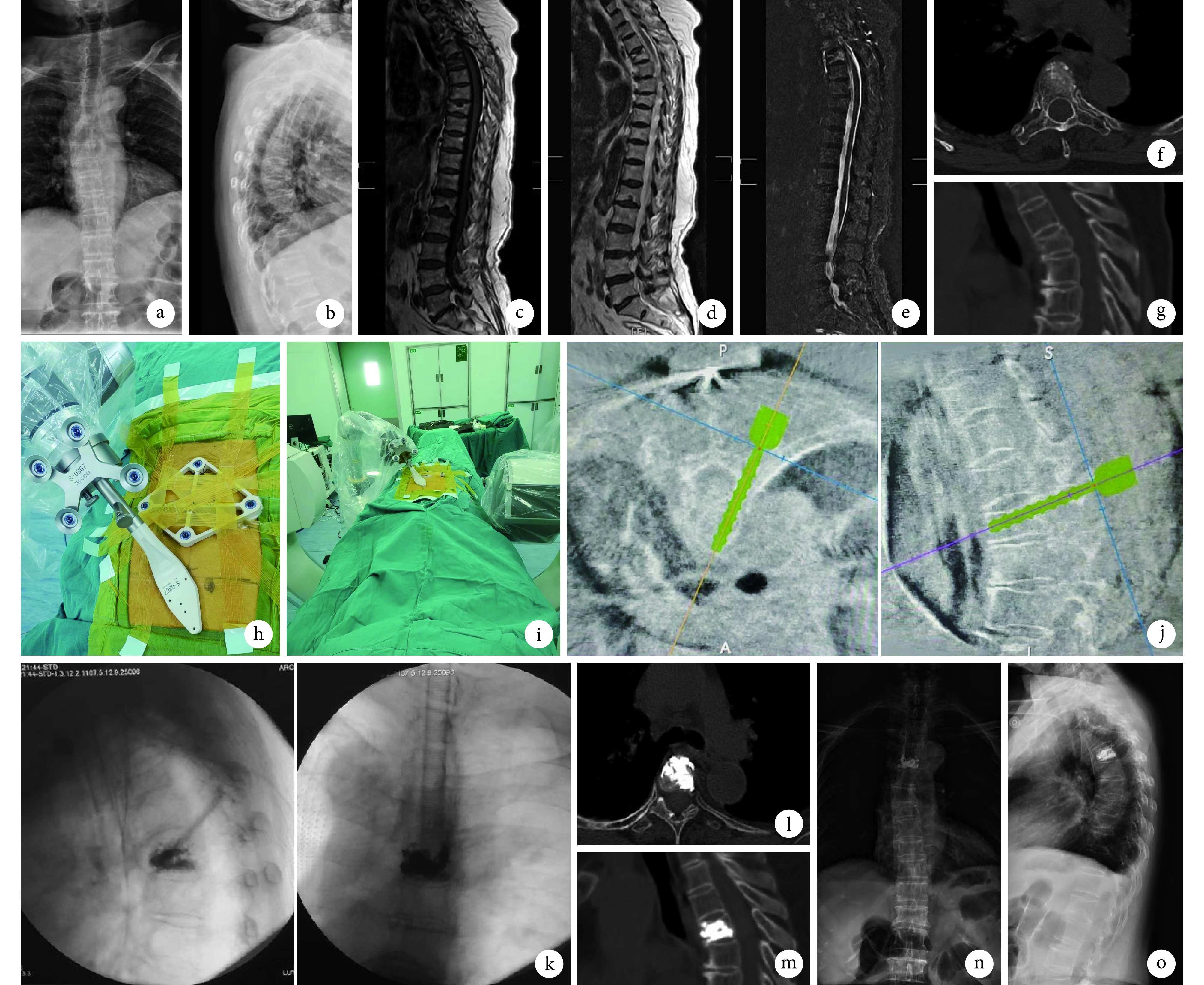
图 1.
A 74-year-old female patient with OVCF at T5 in group A
A组患者,女,74岁,T5 OVCF
a、b. 术前胸椎正侧位X线片;c~e. 术前MRI示T1WI低信号,T2WI高信号,脂肪抑制像高信号;f. 术前水平位CT示T5椎弓根狭窄;g. 术前矢状位CT示无骨折块后凸压迫脊髓;h. 术中用缝线及聚维酮碘薄膜胶布将“天玑”骨科机器人示踪器固定于背部皮肤表面;i. 术中C臂X线机连续扫描构建椎体模型;j. 术中规划最佳穿刺路径;k. 术中透视提示骨水泥弥散良好;l、m. 术后1 d水平位及矢状位CT示骨水泥呈海绵状分布良好,无渗漏,骨水泥分布指数Ⅴ级;n、o. 术后1 d胸椎正侧位X线片示伤椎Cobb角较术前显著改善
a, b. Anteroposterior and lateral X-ray films of thoracic vertebrae before operation; c-e. Preoperative MRI showed low signal intensity of T1WI, high signal intensity of T2WI, and high signal intensity of fat suppression; f. Preoperative horizontal CT of T5 showed pedicle stenosis; g. Preoperative sagittal CT showed that no fracture mass kyphosis compressed the spinal cord; h. The TiRobot tracer was fixed on the surface of the back skin with sutures and povidone iodine film tape; i. Construction of vertebral model by continuous scanning of C-arm X-ray machine during operation; j. Planning the best puncture path during operation; k. Intraoperative fluoroscopy showed that the bone cement was well dispersed; l, m. Horizontal and sagittal CT at 1 day after operation showed that the bone cement showed a good spongy distribution, no leakage, and the bone cement distribution index was grade Ⅴ; n, o. Anteroposterior and lateral X-ray films of thoracic vertebrae at 1 day after operation showed that the Cobb angle of injured vertebrae was significantly improved when compared with preoerative one
3. 讨论
脊柱OVCF患者逐年增多,严重影响其生活质量,常需手术来缓解疼痛,重建脊柱的功能以及稳定性[11-12]。此类患者因身体条件大多难以耐受开放手术,主要通过微创手术缓解症状[13]。PKP和经皮椎体成形术是目前临床应用最广泛的治疗OVCF微创手术[4]。张凯等[14]的研究表明PKP能更好地恢复椎体高度,减少骨水泥渗漏,降低骨折再发生率。本研究手术方式均选择PKP。
在手术入路选择方面,单、双侧入路均有相关临床报道。朱玲新等[15]的研究表明,双侧入路易操作、骨水泥分布更好;单侧入路术中X线透射次数少,手术时间短,术中骨水泥用量少,骨水泥渗漏发生率低。薛广等[16]认为单侧入路耗材使用更少,术后骨水泥渗漏率与双侧入路无明显差异。向刚刚等[17]认为双侧入路术后骨水泥弥散分布更好,远期邻椎骨折再发生率更低,但手术时间更长。胸椎椎弓根管径较小,最窄处约为4 mm[18],其毗邻结构都非常重要。因此,我们认为双侧入路将增加手术穿刺风险,且本研究患者多为高龄,手术时间不宜过长,因此均采取单侧穿刺入路。
目前胸椎OVCF行PKP治疗的入路方式主要为经椎弓根入路和经肋横突关节的椎弓根外侧入路。经椎弓根入路操作相对简单,容易掌握,在临床中多用于治疗下胸椎及腰椎OVCF;中上胸椎因解剖结构复杂,主要采用经椎弓根外侧入路。刘玉刚等[19]利用椎体骨性标志定位,经横突上缘行椎弓根外侧入路行PKP治疗上腰椎OVCF患者,术后效果较好,一定程度避免了椎弓根过窄对手术入路的影响。袁中山等[8]的研究表明,经椎弓根外侧入路可减少骨水泥渗漏率,但术中透射次数较多,手术时间较长。唐发兵等[20]研究发现,严重骨质疏松伴有脊柱侧弯畸形患者的骨性标志难以确认,术中常需多次X线透射辅助定位。柴鑫等[21]发现肥胖患者因背部皮下组织较厚可能会增加穿刺难度,对于压缩严重或椎弓根有损害的椎体,经椎弓根外侧入路术中骨性定位较困难。智新力等[6]认为经椎弓根外侧入路路径复杂,对初学者要求较高,掌握不佳易穿入椎管或胸腔。
“天玑”骨科机器人辅助下可清晰辨认胸椎周围组织、提前规划穿刺路线,避免患者呼吸对术中定位的影响[9]。本研究中,根据主刀医生的习惯及对入路方式的熟练程度,均选择经椎弓根入路;结果显示患者术后恢复良好,术后1 d NRS评分、ODI及伤椎Cobb角均较术前显著改善,均未出现椎管内骨水泥渗漏。我们认为在“天玑”骨科机器人辅助下,椎体周围解剖结构清晰可见,穿刺位置及路线可根据术中情况随时调整,极大地提高了手术安全性及精确性;主刀医生的经验和对入路方式的熟练度可能是手术成功的最关键因素。
PKP术后最常见并发症为骨水泥渗漏,存在神经功能障碍和肺栓塞风险[22]。PKP穿刺时,适当增加穿刺角度可使骨水泥弥散更均匀,但会增加骨水泥渗漏风险[23]。机器人辅助下能尽可能地增加穿刺角度,操作范围更大,使得穿刺后导针更易接近椎体中线,骨水泥分布更均匀[24]。本研究中,“天玑”机器人辅助手术组骨水泥用量和骨水泥渗漏率明显低于徒手组,与既往研究结果一致[25-27]。
由于个体差异,骨水泥分布情况采取骨水泥分布指数评价更客观。高骨水泥分布指数可作为远期椎体发生再骨折的独立保护因素;徒手行PKP术后骨水泥常以团块状分布在椎体中央或一侧,邻椎发生再骨折风险较高;机器人辅助下,骨水泥常以海绵状均匀分布于椎体[28-29]。本研究中,“天玑”骨科机器人辅助手术组骨水泥分布较为均匀,弥散较好,多属于Ⅴ级,徒手组多属于Ⅱ级和Ⅴ级,与既往研究结果基本一致。原因可能是在机器人辅助下,进针位置更好且更稳定;而徒手操作过程中术者不敢过度增大内倾角度,以免刺入椎管,导致导针末端多处于穿刺侧而偏离中线,且容易受到患者自身椎体条件影响,导致术后结果稳定性较差。
孙韬等[30]的研究表明利用骨科机器人辅助手术,初期将花费大量时间调试设备和进行术中规划,后期熟练后手术时间将明显缩短,手术精确度也会逐渐增加。郭凯等[31]的胸腰椎植钉研究表明,机器人辅助下可以减少辐射暴露时间,减少患者所受辐射剂量。林书等[2]研究认为,机器人辅助需在术前进行一次连续扫描采集数据,明显增加患者术中接受辐射剂量。本研究中,“天玑”骨科机器人辅助手术组的手术时间和术中X线透射次数明显少于徒手组,与既往研究一致;但因操作技术等原因,患者术中接受的辐射总量未完整收集,尚未作比较。部分学者认为将来可使用低放射量X线机和通过降低X线机扫描频率来减少辐射总量[2],但我们认为这可能会导致图像清晰度下降,降低手术精确度。
虽然在机器人辅助下手术更加精准、简单,但也有不足之处。① 使用“天玑”骨科机器人学习曲线较长,需要团队默契配合。② 术前采集数据会增加患者辐射伤害,但减少扫描剂量和频次又会降低图像清晰度,利用人工智能技术结合术前CT图像来修复重建图像质量或许是未来研究方向之一。③ 成本效应也是不可忽略的因素,使用机器人辅助手术治疗,患者需支付额外费用,在安装示踪器时常需进行全身麻醉,又会增加患者麻醉费用[32]。林书等[2]的研究表明,通过将示踪器用无菌薄膜固定在皮肤表面可满足局部麻醉条件,在取得良好手术效果同时,可适当减少患者手术费用。
本研究不足之处:① 采取的是单中心、回顾性对照研究,且纳入总样本量较少。上胸椎骨折患者大多存在神经功能症状,本研究中未收集到符合纳入标准的上胸椎骨折患者资料,后续需收集更加全面的数据开展前瞻性、多中心、大样本、随机对照研究。② 本研究中部分患者术中接受辐射总量未准确采集,有待完善数据后进一步分析。③ 目前治疗胸椎OVCF主要通过椎弓根外侧入路,在机器人辅助下,两种不同入路方式的治疗效果有待进一步研究分析。
综上述, “天玑”骨科机器人辅助经椎弓根入路PKP治疗胸椎OVCF安全有效,与传统X线透视下穿刺相比,可减少术中透射次数、缩短手术时间、减少骨水泥注入量、降低骨水泥渗漏发生。
利益冲突 在课题研究和文章撰写过程中不存在利益冲突;经费支持没有影响文章观点和对研究数据客观结果的统计分析及其报道
伦理声明 研究方案经德阳市人民医院医学伦理会批准(2019-06-001-K01);患者均签署知情同意书
作者贡献声明 马铭志:数据收集、整理、统计分析、绘图、文章撰写及修改;王志聪:科研设计、既往研究成果收集;叶佳徽:临床随访及数据采集、统计分析;陈曦:手术实施、文章的整体设计与内容修改、审阅
Funding Statement
白求恩·脊柱病理性骨折椎体强化治疗专项基金(BK-JP2018002)
Bethune Special Funds for Vertebral Augmentation of Pathologic Spinal Fractures (BK-JP2018002)
References
- 1.Yuan W, Meng X, Cao W, et al Robot-assisted versus fluoroscopy-assisted kyphoplasty in the treatment of osteoporotic vertebral compression fracture: A retrospective study. Global Spine J. 2022;12(6):1151–1157. doi: 10.1177/2192568220978228. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 2.林书, 谭科, 胡豇, 等 改良骨科机器人辅助椎体后凸成形术治疗骨质疏松性椎体压缩骨折疗效分析. 中国修复重建外科杂志. 2022;36(9):1119–1125. doi: 10.7507/1002-1892.202204013. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 3.Li Q, Wu C, Huang Z, et al A comparison of robot-assisted and fluoroscopy-assisted kyphoplasty in the treatment of multi-segmental osteoporotic vertebral compression fractures. J Biomed Res. 2022;36(3):208–214. doi: 10.7555/JBR.36.20220023. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 4.宋体忠 PVP与PKP治疗骨质疏松性胸腰椎压缩骨折临床效果对比. 系统医学. 2022;7(5):95–98. [Google Scholar]
- 5.张翀景, 张旭, 李得见, 等 O型臂导航引导下经皮椎体成形术治疗中段胸椎骨质疏松性椎体压缩骨折的精准性及安全性. 复旦学报(医学版) 2022;49(5):739–746. [Google Scholar]
- 6.智新力, 赵丽娟, 孙智 椎弓根外上入路椎体成形术治疗中上段胸椎骨质疏松性压缩骨折. 实用骨科杂志. 2023;29(2):149–152. [Google Scholar]
- 7.许梓健, 顾洪生, 蒯声政, 等 骨科手术机器人的临床应用与进展. 机器人外科学杂志(中英文) 2022;3(5):376–387. [Google Scholar]
- 8.袁中山, 夏良政, 余涛, 等 探讨经肋横突关节间隙椎体成形术治疗胸椎骨质疏松性压缩骨折的临床疗效和安全性. 临床和实验医学杂志. 2021;20(18):1977–1980. [Google Scholar]
- 9.郑博隆, 郝定均, 林斌, 等 “天玑”骨科手术机器人辅助与徒手穿刺椎体成形术治疗上胸椎骨质疏松性椎体压缩骨折的疗效比较. 中华创伤骨科杂志. 2021;23(1):20–26. [Google Scholar]
- 10.吴登将, 陈为坚, 张远华, 等 椎体增强术后骨水泥分布指数对手术椎体及邻边椎体再发骨折的影响. 中国老年学杂志. 2022;42(6):1392–1395. [Google Scholar]
- 11.Zhang Y, Chen X, Ji J, et al Comparison of unilateral and bilateral percutaneous kyphoplasty for bone cement distribution and clinical efficacy: An analysis using three-dimensional computed tomography images. Pain Physician. 2022;25(6):E805–E813. [PubMed] [Google Scholar]
- 12.丁一, 海涌, 杨晋才, 等 改良一侧PKP联合对侧PVP与双侧PKP治疗骨质疏松性椎体压缩骨折的对比研究. 中国骨与关节杂志. 2020;9(1):27–32. [Google Scholar]
- 13.Bousson V, Hamze B, Odri G, et al Percutaneous vertebral augmentation techniques in osteoporotic and traumatic fractures. Semin Intervent Radiol. 2018;35(4):309–323. doi: 10.1055/s-0038-1673639. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 14.张凯, 任耀, 张帅良, 等 PVP与PKP治疗骨质疏松性压缩性骨折的效果比较. 中国实用医刊. 2023;50(3):30–33. [Google Scholar]
- 15.朱玲新, 王爱玲, 向宝华 单侧与双侧入路PKP对胸腰椎体压缩性骨折的影响. 辽宁医学杂志. 2023;37(3):67–71. [Google Scholar]
- 16.薛广, 杨新明, 张瑛 两种入路行经皮椎体成形治疗胸椎骨质疏松性压缩骨折: 骨水泥渗漏及安全性的比较. 中国组织工程研究. 2022;26(28):4514–4518. [Google Scholar]
- 17.向刚刚, 曹鹏, 黎太友, 等 不同入路对PKP术治疗OVCF的近中期临床疗效影响及与邻椎骨折的相关性. 吉林医学. 2023;44(1):34–37. [Google Scholar]
- 18.李宗泽, 陈建庭, 朱青安, 等 新型手术机器人系统自主置入胸椎椎弓根螺钉的准确性研究. 生物骨科材料与临床研究. 2022;19(2):5–10. [Google Scholar]
- 19.刘玉刚, 王炳辉, 龙游, 等 经横突上缘椎弓根外侧入路单侧穿刺经皮椎体成形术治疗上腰椎骨质疏松性椎体压缩骨折. 中华创伤杂志. 2018;34(4):312–318. [Google Scholar]
- 20.唐发兵, 陶建宏 改良单侧入路经皮椎体成形术治疗胸椎骨质疏松性椎体压缩骨折. 吉林医学. 2023;44(4):996–998. [Google Scholar]
- 21.柴鑫, 杨俊松, 徐辉, 等 经横突上缘椎弓根外侧入路单侧PKP治疗伴椎弓根狭窄骨质疏松性腰椎骨折. 实用骨科杂志. 2023;29(4):296. [Google Scholar]
- 22.Wu SC, Luo AJ, Liao JC Cement augmentation for treatment of high to mid-thoracic osteoporotic compression fractures, high-viscosity cement percutaneous vertebroplasty versus balloon kyphoplasty. Sci Rep. 2022;12(1):19404. doi: 10.1038/s41598-022-22019-0. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 23.罗远盟. 单侧经皮穿刺椎体成形术后骨水泥分布对术后早期疼痛缓解的影响. 重庆: 重庆医科大学, 2022.
- 24.林书, 胡豇, 万仑, 等 机器人与透视辅助经皮椎弓根螺钉置入的比较. 中国矫形外科杂志. 2020;28(20):1830–1834. [Google Scholar]
- 25.邢宝瑞, 侯秀秀, 崔梦倩, 等 机器人辅助经皮椎体后凸成形术治疗单/双节段骨质疏松性椎体压缩骨折临床效果观察. 康颐. 2023;(5):100–102. [Google Scholar]
- 26.杨毅, 地力牙尔·莫合塔尔, 彭理斌, 等 机器人辅助经皮椎体后凸成形术在胸腰椎压缩性骨折治疗中的应用. 中华解剖与临床杂志. 2022;27(12):810–816. [Google Scholar]
- 27.宋旆文, 杨昆, 董福龙, 等 机器人辅助下单侧优势路与传统单侧PKP手术治疗骨质疏松性压缩骨折的疗效比较. 颈腰痛杂志. 2021;42(5):727–729. [Google Scholar]
- 28.刘军, 薛刚, 汪鑫, 等 预后营养指数、骨密度、骨水泥分布指数对骨质疏松性压缩性骨折椎体成形术后邻近椎体再骨折的预测价值. 皖南医学院学报. 2023;42(1):46–49. [Google Scholar]
- 29.郭松, 付强, 杭栋华, 等 Mazor脊柱机器人辅助改良经皮椎体成形术治疗腰椎骨质疏松性骨折的疗效分析. 中国脊柱脊髓杂志. 2021;31(9):818–824. [Google Scholar]
- 30.孙韬, 张元智, 胡旭锋, 等 双平面定位机器人辅助PKP治疗骨质疏松性椎体压缩性骨折的可行性分析. 生物骨科材料与临床研究. 2022;19(3):27–31. [Google Scholar]
- 31.郭凯, 张家豪, 黄星, 等 框架式并联骨科手术机器人辅助椎弓根螺钉置入. 中国组织工程研究. 2023;27(22):3492–3497. [Google Scholar]
- 32.李玉希, 黄浚燊, 刘婷, 等 脊柱手术机器人在脊柱外科手术中的应用进展. 机器人外科学杂志(中英文) 2021;2(2):143–150. [Google Scholar]