

Abstract
The exponential synchronization rate is addressed for Kuramoto oscillators in the presence of a pacemaker. When natural frequencies are identical, we prove that synchronization can be ensured even when the phases are not constrained in an open half-circle, which improves the existing results in the literature. We derive a lower bound on the exponential synchronization rate, which is proven to be an increasing function of pacemaker strength, but may be an increasing or decreasing function of local coupling strength. A similar conclusion is obtained for phase locking when the natural frequencies are non-identical. An approach to trapping phase differences in an arbitrary interval is also given, which ensures synchronization in the sense that synchronization error can be reduced to an arbitrary level.
Index Terms: Exponential synchronization rate, Kuramoto model, pacemaker, oscillator networks
I. Introduction
The Kuramoto model was first proposed in 1975 to model the synchronization of chemical oscillators sinusoidally coupled in an all-to-all architecture [1]. Although it is elegantly simple, the Kuramoto model is sufficiently flexible to be adapted to many different contexts, hence it is widely used and is regarded as one the most representative models of coupled phase oscillators [2]. Recently, the Kuramoto model has received increased attention. For example, the authors in [3], [4], [5] discussed synchronization conditions for the Kuramoto model. The work in [6] gave a synchronization condition for delayed Kuramoto oscillators. Results are also obtained for Kuramoto oscillators with coupling topologies different from the original all-to-all structure. For example, the authors in [7] and [8] considered the phase locking of Kuramoto oscillators coupled in a ring and a chain, respectively. Using graph theory, the authors in [9], [10], [11] discussed the synchronization of Kuramoto oscillators with arbitrary coupling topologies. The authors in [12] proved that exponential synchronization can be achieved for Kuramoto oscillators when phases lie in an open half-circle.
Studying the influence of the pacemaker (also called the leader, or the pinner [13]) on Kuramoto oscillators is not only of theoretical interest, but also of practical importance [14], [15]. For example, in circadian systems, thousands of clock cells in the brain are entrained to the light-dark cycle [16]. In the clock synchronization of wireless networks, time references in individual nodes are synchronized by means of intercellular interplay and external coordination from a time base such as GPS [17]. Hence, Kuramoto oscillators with a pacemaker are attracting increased attention. The authors in [14] and [18] studied the bifurcation diagram and the steady macroscopic rotation of Kuramoto oscillators forced by a pacemaker that acts on every node. Based on numerical methods, the authors in [19] showed that the network depth (defined as the mean distance of nodes from the pacemaker, a term closely related to pinning-controllability in pinning control [20]) affects the entrainment of randomly coupled Kuramoto oscillators to a pacemaker. Using numerical methods, the authors in [21] discovered that there may be situations in which the population field potential is entrained to the pacemaker while individual oscillators are phase desynchronized. But compared with the rich results on pacemaker-free Kuramoto oscillators, analytical results are relative sparse for Kuromoto oscillators forced by a pacemaker. And to our knowledge, there are no existing results on the synchronization rate of arbitrarily coupled Kuramoto oscillators in the presence of a pacemaker.
The synchronization rate is crucial in many synchronized processes. For example, in the main olfactory system, stimulus-specific ensembles of neurons synchronize their firing to facilitate odor discrimination, and the synchronization time determines the speed of olfactory discrimination [22]. In the clock synchronization of wireless sensor networks, the synchronization rate is a determinant of energy consumption, which is vital for cheap sensors [23], [24].
We consider the exponential synchronization rate of Kuramoto oscillators with an arbitrary topology in the presence of a pacemaker. In the identical natural frequency case, we prove that synchronization (oscillations with identical phases) can be ensured, even when phases are not constrained in an open half-circle. In the non-identical natural frequency case where perfect synchronization has been shown cannot be achieved [2],[25], we prove that phase locking (oscillations with identical oscillating frequencies) can be ensured and synchronization can be achieved in the sense that phase differences can be reduced to an arbitrary level. In both cases, the influences of the pacemaker and local coupling strength on the synchronization rate are analyzed.
II. Problem formulation and Model transformation
Consider a network of N oscillators, which will henceforth be referred to as ‘nodes’. All N nodes (or a subset) receive alignment information from a pacemaker (also called the leader, or the pinner [13]). Denoting the phases of the pacemaker and node i as ϕ0 and ϕi, respectively, the dynamics of the Kuramoto oscillator network can be written as
| (1) |
for 1 ≤ i ≤ N, where w0 and wi are the natural frequencies of the pacemaker and the ith oscillator, respectively, ai,j sin (ϕj − ϕi) is the interplay between node i and node j with ai,j ≥ 0 denoting the strength, gi sin(ϕ0 − ϕi) denotes the force of the pacemaker with gi ≥ 0 denoting its strength. If ai,j = 0 (or gi = 0), then oscillator i is not influenced by oscillator j (or the pacemaker).
Assumption 1
We assume symmetric coupling between pairs of oscillators, i.e., ai,j = aj,i.
Next, we study the influences of the pacemaker, gi, and local coupling, ai,j, on the rate of exponential synchronization.
Solving the first equation in (1) gives the dynamics of the pacemaker ϕ0 = w0t + φ0, where the constant φ0 denotes the initial phase. To study if oscillator i is synchronized to the pacemaker, it is convenient to study the phase deviation of oscillator i from the pacemaker. So we introduce the following change of variables:
| (2) |
ξi ∈ [−2π, 2π] denotes the phase deviation of the ith oscillator from the pacemaker. Due to the 2π-periodicity of the sine-function, we can restrict our attention to ξi ∈ [−π, π]. Substituting (2) into (1) yields the dynamics of ξi:
| (3) |
Since ξi is the relative phase of the ith oscillator with respect to the phase of the pacemaker, it will be referred to as relative phase in the remainder of the paper.
By studying the properties of (3), we can obtain:
Condition for synchronization: If all ξi converge to 0, then we have ϕ1 = ϕ2 = …= ϕN = ϕ0 when t → ∞, meaning that all nodes are synchronized to the pacemaker.
-
Exponential synchronization rate: The rate of synchronization is determined by the rate at which ξi decays to 0, namely, it can be measured by the maximal α satisfying
(4) for some constant C, where ||•|| is the Euclidean norm. α measures the exponential synchronization rate of (3): a larger α leads to a faster synchronization rate.
Remark 1
When wi and w0 are non-identical, synchronization (ξi = 0) cannot be achieved in general. But we will prove in Sec. IV-C that the synchronization error can be made arbitrarily small by tuning the strength of the pacemaker gi.
Assigning arbitrary orientation to each interaction, we can get the N × M incidence matrix B (M is the number of interaction edges, i.e., non-zero ai,j (1 ≤ i ≤ N, j < i)) of the interaction graph [26]: Bi,j = 1 if edge j enters node i, Bi,j = −1 if edge j leaves node i, and Bi,j = 0 otherwise. Then using graph theory, (3) can be recast in a matrix form:
| (5) |
where Ω = [w1 − w0, w2 − w0, …, wN − w0]T, G = diag(g1, g2, …, gN), and W = diag(ν1, ν2, …, νM). Here νi (1 ≤ i ≤ M) are a permutation of non-zero ai,j (1 ≤ i ≤ N, j < i) and diag(•) denotes a diagonal matrix.
III. The identical natural frequency case
When w1 = w2 = … = wN = w0, (5) reduces to:
| (6) |
To study the exponential synchronization rate, we first give a synchronization condition:
Theorem 1
For the network in (6), denote and sinc(x) ≜ sin(x)/x, then
when , the network synchronizes if at least one gi is positive and the coupling ai,j is connected, i.e., there is a multi-hop link from each node to every other node;
-
when , the network synchronizes if the following inequality is satisfied:
(7) where λmax(•) denotes the maximal eigenvalue, gmin and are determined by(8)
Proof
We first prove that when ξ ∈ [−ε, ε] × … × [−ε, ε] = [−ε, ε]N where × denotes Cartesian product, they will remain in the interval under conditions in Theorem 1, i.e, the n-tuple set [−ε, ε]N is positively invariant for (6).
To prove the positive invariance of [−ε, ε]N, we only need to check the direction of vector field on the boundaries. When , if ξi = ε, we have −π < −2ε ≤ ξj − ξi ≤ 0 for 1 ≤ j ≤ N. So in (3), sin(ξj − ξi) ≤ 0 and sin(ξi) > 0 hold, and hence ξ̇i < 0 holds (Note that wi − w0 = 0). Hence the vector field is pointing inward in the set, and no trajectory can escape to values larger than ε. Similarly, we can prove that when ξi = −ε, ξ̇i > 0 holds. Thus no trajectory can escape to values smaller than −ε. Therefore [−ε, ε]N is positively invariant when . When , if ξi = ε, we have sin ξi = sin ε > 0 and sin(ξj − ξi) ≤ 1 for 1 ≤ j ≤ N. So when wi = w0, if (7) is satisfied, the right hand side of (3) is negative, i.e., ξ̇i < 0 holds. Therefore the vector field is pointing inward in the set and no trajectory can escape to values larger than ε. Similarly, we can prove that if ξi = −ε, ξ̇i > 0 holds under condition (7). Thus no trajectory can escape to values smaller than −ε. Therefore [−ε, ε]N is also positively invariant for if (7) is satisfied.
Next we proceed to prove synchronization. Define a Lyapunov function as . V ≥ 0 is zero iff all ξi are zero, meaning the synchronization of all nodes to the pacemaker.
Differentiating V along the trajectories of (6) yields
| (9) |
where S1 ∈
 and S2 ∈
and S2 ∈
 are given by
are given by
| (10) |
with (BTξ)i denoting the ith element of the M ×1 dimensional vector BTξ.
From dynamic systems theory, if GS1 +BWS2BT in (9) is positive definite when ξ ≠ 0, then V̇ is negative when ξ ≠ 0 and V will decay to zero, meaning that ξ will decay to zero and all nodes are synchronized to the pacemaker.
-
When all ξi are within [−ε, ε] with , (BTξ)i is in the form of ξm − ξn (1 ≤ m, n ≤ N), and hence is restricted to (−π, π). Given that in (−π, π), sinc(x) > 0 holds, it follows that S1 and S2 satisfy the following inequalities:
(11) So we have GS1 + BWS2BT ≥ σ1G + σ2BWBT, which in combination with (9) produces(12) It can be verified that σ1G + σ2BWBT is of form:(13) with L ∈
given as follows: for i ≠ j, its (i, j)th element is −ai,j, for i = j, its (i, j)th element is
. Since σ1 and σ2 are positive, gi and ai,j are non-negative, it follows from the Gershgorin Circle Theorem that σ1G + σ2BWBT only has non-negative eigenvalues [27]. Next we prove its positive definiteness by excluding 0 as an eigenvalue.Since the topology of ai,j is connected, σ1G + σ2BWBT is irreducible from graph theory [27]. This in combination with the assumption of at least one gi > 0 guarantees that σ1G + σ2BWBT is irreducibly diagonally dominant. So from Corollary 6.2.27 of [27], we know its determinant is non-zero, and hence 0 is not its eigenvalue. Therefore σ1G + σ2BWBT is positive definite, and hence V will converge to 0, meaning that the nodes will synchronize to the pacemaker.
-
When ξi ∈ [−ε, ε] (1 ≤ i ≤ N) with , S1 is positive definite but S2 is not since (BTξ)i is in [−2ε, 2ε], and thus sinc(BTξ)i may be negative. It can be proven that sinc(x) is monotonically decreasing on [0, 2ε0] and monotonically increasing on [2ε0, 2π] (using the first derivative test), where is determined by (8). Hence we have S1 ≥ sinc(ε)I and S2 ≥ sinc(2ε0)I where sinc(2ε0) < 0. Therefore (9) reduces to
(14) Thus ξ → 0 if gminsinc(ε) + sinc(2ε0)λmax(BWBT) > 0 holds.
Remark 2
It is already known that for general Kuramoto oscillators without a pacemaker, synchronization can only be ensured when is less than π, i.e., the initial phases lie in an open half-circle [9], [10], [11], [12], [28], [29] (although when phases are lying outside a half-circle, almost global synchronization is possible by replacing the sinusoidal interaction function with elaborately designed periodic functions [30], [31], it may introduce numerous unstable equilibria [31]). Here, synchronization is ensured even when ξi is outside ( ), i.e., when phase difference ϕi − ϕj = ξi − ξj is larger than π, meaning that the phases can lie outside a half-circle. This shows the advantages of introducing a pacemaker.
Remark 3
Theorem 1 indicates that when ξi is outside ( ), i.e., when phases cannot be constrained in one open half-circle, all nodes have to be connected to the pacemaker to ensure synchronization. In fact, when some oscillators are not connected to the pacemaker, the relative phases may not converge to 0. For example, consider two connected oscillators, 1 and 2, with coupling strength a1,2 = a2,1 = κ. If the pacemaker only acts on oscillator 1 with strength g1 = κ and the phases of the pacemaker, oscillator 1 and 2 are π, 0.4π, and 1.6π, respectively, though ξ1 = −0.6π and ξ2 = 0.6π are all within [−0.6π, 0.6π], numerical simulation shows that ξ2 will not converge to 0 no matter how large κ is.
Remark 4
Since the eigenvalues of BWBT are nonnegative [26], λmax(BWBT) > 0.
Based on a similar derivation, we can get a bound on the exponential synchronization rate:
Theorem 2
For the network in (6), denote
. If the conditions in Theorem 1 are satisfied, then the exponential synchronization rate can be bounded as follows:
-
when holds, the exponential synchronization rate is no worse than
(15) with σ1G + σ2BWBT given in (13);
- when holds, the exponential synchronization rate is no worse than
(16)
Proof
From the proof in Theorem 1, when , we have V̇ ≤ −2α1V, which means V (t) ≤ C2e−2α1tV(0) ⇒ ||ξ(t)|| ≤ Ce−α1t||ξ(0)|| for some positive constant C. Thus the synchronization rate is no less than α1.
Similarly, when holds, we have V̇ ≤ −2α2V. Hence the exponential synchronization rate is no less than α2, which completes the proof.
Remark 5
When holds and there is no pacemaker, i.e., G = 0, using the average phase as reference, we can define the relative phase as ξi = ϕi − ϕ̄. Since ξT1 = 0 with 1 = [1,1, …, 1]T, the constraint ξT1 = 0 is added to the optimization in (15). Given that G = 0 and BWBT is the Laplacian matrix of interaction graph and hence has eigenvector 1 with associated eigenvalue 0 [27], λmin in (15) reduces to the second smallest eigenvalue, which is the same as the convergence rate in section IV of [32] obtained using contraction analysis.
Eqn. (16) shows that when , a stronger pacemaker, i.e., a larger gmin leads to a larger α2, but the relation between α1 and gi when is not clear. (In this case, gmin may be zero.) We can prove that in this case α1 also increases with gi for any i = 1, 2, …, N:
Theorem 3
Both α1 in (15) and α2 in (16) increase with an increase in pacemaker strength.
Proof
As analyzed in the paragraph above Theorem 3, we only need to prove Theorem 3 when holds, i.e., α1 is an increasing function of gi. Recall from (13) that σ1G + σ2BWBT is an irreducible matrix with non-positive off-diagonal elements, so there exists a positive μ such that μI − (σ1G + σ2BWBT) is an irreducible non-negative matrix. Therefore, λmax (μI − (σ1G + σ2BWBT)) is the Perron-Frobenius eigenvalue of μI − (σ1G + σ2BWBT) and is positive [27]. Given that for any 1 ≤ i ≤ N, μ − λi(σ1G + σ2BWBT) is an eigenvalue of μI − (σ1G + σ2BWBT) where λi denotes the ith eigenvalue, we have μ − λmin(σ1G + σ2BWBT) = λmax (μI − (σ1G + σ2BWBT)), i.e., α1 = λmin(σ1G + σ2BWBT) = μ − λmax (μI − (σ1G + σ2BWBT)).
Since the Perron-Frobenius eigenvalue of μI − (σ1G + σ2BWBT) is an increasing function of its diagonal elements [27], which are decreasing functions of all gi, it follows that λmax (μI − (σ1G + σ2BWBT)) is a decreasing function of gi, meaning that α1 is an increasing function of all gi.
Remark 6
When all ξi are in ( ), since S2 in (10) is positive definite, which leads to −ξT BWS2BT ξ < 0, the local coupling will increase α1 in (15). But when is larger than , S2 can be indefinite, hence −ξT BWS2BT ξ can be positive, negative or zero, thus the local coupling may increase, decrease or have no influence on the synchronization rate. This conclusion is confirmed by simulations in Sec. V.
IV. The non-identical natural frequency case
When natural frequencies are non-identical, Kuramoto oscillators cannot be fully synchronized [2], [25]. Next, we will prove that synchronization can be achieved in the sense that the synchronization error (defined as the maximal relative phase) can be made arbitrarily small. This is done in two steps: first we show that under some conditions, the oscillators can be phase-locked, then we prove that the relative phases can be trapped in [−δ, δ] for an arbitrary δ > 0 if the pacemaker is strong enough. The role played by the phase trapping approach is twofold: on the one hand, it makes the conditions required in phase locking achievable, and on the other hand, in combination with the phase locking, it can reduce the phase synchronization error to an arbitrary level.
A. Conditions for phase locking
When the natural frequencies are non-identical, the dynamics of the oscillator network are given in (5). As in previous studies, we assume that the natural frequencies are constant with respect to time. The results are summarized below:
Theorem 4
Denote , then the network in (5) can achieve phase locking if
holds, at least one gi is positive, and the coupling ai,j is connected;
and hold.
Proof
To prove phase locking, i.e., all oscillators oscillate at the same frequency, we need to prove that the oscillating frequencies ϕ̇i are identical. From (2), we have ϕ̇i = w0 + ξ̇i, so if ζ ≜ ξ̇ converges to zero, then phase locking is achieved.
Differentiating (5) yields
| (17) |
where
| (18) |
Following the line of reasoning of the proof of Theorem 1, we can prove that ζ is positively invariant under conditions in Theorem 4. Next we proceed to prove the convergence of ζ.
Define a Lyapunov function as . Differentiating V along the trajectory of (17) yields
| (19) |
Following the line of reasoning of Theorem 1, when ζ ≠ 0, we can obtain V̇ < 0 under the conditions in Theorem 4. So V, and hence ζ will converge to 0. Thus oscillating frequencies become identical and phase locking is achieved.
Remark 7
In the absence of a pacemaker, the authors in [3] proved that if the phase difference between any two oscillators, i.e., ϕi − ϕj, ∀i, j, is within [ ], then phase locking can be achieved. Given ϕi−ϕj = ξi−ξj, ∀i, j, the condition in [3] only applies to in our formulation framework.
B. A bound on the exponential rate of phase locking
Theorem 5
For the network in (5), denote . If the conditions in Theorem 4 are satisfied, then
-
when holds, the exponential phase-locking rate is no worse than
(20) with σ3 ≜ cosε and σ4 ≜ cos 2ε;
- when holds, the exponential phase-locking rate is no worse than
(21)
Proof
Theorem 5 can be derived following the line of reasoning of Theorem 2 and thus is omitted.
Remark 8
Following Theorem 3, we can prove that a stronger pacemaker always increases α3 (and α4). But a stronger local coupling can have different impacts: when , S4 in (18) is positive definite, −ζTBWS4BT ζ is negative, so the local coupling will increase α3. However, when , since S4 in (18) can be indefinite, −ζTBWS4BT ζ can be positive or negative. Thus the local coupling may increase or decrease the rate of phase locking. The conclusion will be confirmed by simulations in Sec. V.
C. Method for trapping relative phases
In this section, we will give a method such that the relative phases are trapped in any interval [−δ, δ] with an arbitrary 0 < δ < π.
Theorem 6
For (5) with frequency differences Ω, denote and , then the relative phases can be trapped in a compact set [−δ, δ] for an arbitrary 0 < δ < π
- if and the following condition is satisfied:
(22) -
if and the following condition is satisfied:
(23) where ε0 is defined in (8).
Proof
Differentiating Lyapunov function along the trajectory of (5) yields
| (24) |
with S1 and S2 defined in (10).
-
When holds, we have S1 ≥ sinc(ε)I > 0 and S2 ≥ 0 from previous analysis. Using (24), (10), and the fact λmin(G) = gmin, we have
(25) If ξi is outside [−δ, δ] for some i, we have , which in combination with (22) leads to V̇ < 0. Therefore all ξi will converge to [−δ, δ].
-
When holds, from the analysis in Theorem 1, we have S1 ≥ sinc(ε)I > 0 and S2 ≥ sinc(2ε0)I. Then using (24) and the fact λmin(G) = gmin, we have
(26) If ξi is outside [−δ, δ] for some i, we have ||ξ|| > δ, which in combination with (23) leads to V̇ < 0. Thus all ξi will converge to the interval [−δ, δ].
Remark 9
Theorem 6 used the important fact that if is restricted to the interval [0, δ], then all ξi are restricted to the interval [−δ, δ].
Remark 10
When ||ξ|| < π, [3] gives a condition under which ξi can be trapped in an arbitrary compact set. Since for a large number of oscillators N, is difficult to satisfy, our result is more general.
V. Simulation results
We consider a network composed of N = 9 oscillators. The coupling strengths ai,j are randomly chosen from the interval [0, 0.1]. They were found to form a connected interaction graph. As in previous studies, we use the modulus of the order parameter to measure the degree of synchrony [25]. The value of r (r ∈ [0, 1]) will approach 1 as the network is perfectly synchronized, and 0 if the phases are randomly distributed [25]. According to [25], we have r ≈ 1 when the oscillators are synchronized. So we define synchronization to be achieved when r exceeds 0.99.
When the natural frequencies are identical, we set the phase of the pacemaker ϕ0 to ϕ0 = w0t with w0 = 1 and simulated the network using initial phases ϕi = ϕ0 + ξi with and initial phases ϕi = ϕ0 + ξi with ξi ∈ (−π, π), respectively. In the former case, we connected the first oscillator to the pacemaker and set g1 = g, g2 = g3 = … = g9 = 0. In the latter case, we connected all oscillators to the pacemaker and set g1 = g2 = … = g9 = g. In both cases, we set g = 1. To show the influences of the pacemaker on the synchronization rate, we fixed ai,j and simulated the network under different pacemaker strengths m × g, where m = 1, 2, …, 10. To show the influences of local coupling on the synchronization rate, we fixed the strength of the pacemaker to 3g and simulated the network under different local coupling strengths m × ai,j for all ai,j, where m = 1, 2, …, 10. All the synchronization times are averaged over 100 runs with initial ξi in each run randomly chosen from a uniform distribution on ( ) (in the former case) or on (−π, π) (in the latter case). The results are given in Fig. 1. It is clear that a stronger pacemaker always increases the synchronization rate, whereas the local coupling increases the synchronization rate when all ξi are within ( ), and it may increase or decrease the synchronization rate when the maximal/minimal ξi is outside ( ).
Fig. 1.
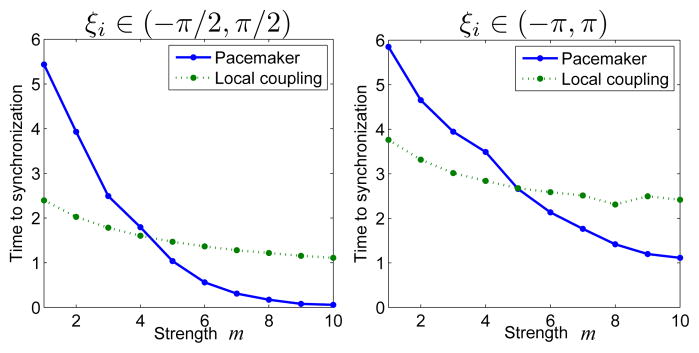
Times to synchronization under different strengths of pacemaker/local coupling (with all oscillators having identical natural frequencies).
When the natural frequencies are non-identical, we simulated the network using initial phases ϕi = ϕ0 + ξi with and initial phases ϕi = ϕ0 + ξi with , respectively. In the former case, we connected the first oscillator to the pacemaker and set g1 = g. In the latter case, we connected all the oscillators to the pacemaker and set g1 = g2 = … = g9 = g. The natural frequencies were randomly chosen from (0, 1). Tuning the strengths in the same way as in the identical natural frequency case, we simulated the network under different strengths of the pacemaker and local coupling. All of the times to phase locking are averaged over 100 runs with initial ξi randomly chosen from a uniform distribution on ( ) (in the former case) or on ( ) (in the latter case). The results are given in Fig. 2. It is clear that a stronger pacemaker always increases the rate to phase locking, whereas the local coupling increases the rate to phase locking when all ξi are within ( ), and it may increase or decrease the rate to phase locking when the maximal/minimal ξi is outside ( ).
Fig. 2.
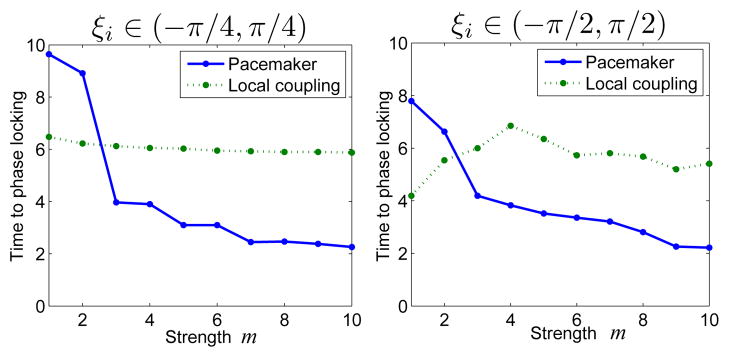
Times to phase locking under different strengths of pacemaker/local coupling (with oscillators having non-identical natural frequencies).
To confirm the prediction that ξi can be made smaller by making the pacemaker strength stronger, we set g1 = … = g9 = g and simulated the network under initial phases ϕi = ϕ0 + ξi with ξi ∈ (−π, π). Using the same ξi, the maximal final relative phase when the strength of the pacemaker g is made m (m = 1, 2, …, 10) times greater is recorded and given in Fig. 3. It can be seen that the maximal final relative phase (i.e., synchronization error) decreases with the strength of the pacemaker, confirming the prediction in Theorem 6.
Fig. 3.

The maximal final relative phase (phase synchronization error) under different strengths of the pacemaker when oscillators have non-identical natural frequencies (which are randomly chosen from the interval (0, 1)).
VI. Conclusions
The exponential synchronization rate of Kuramoto oscillators is analyzed in the presence of a pacemaker. In the identical natural frequency case, we prove that synchronization to the pacemaker can be ensured even when the initial phases are not constrained in an open half-circle, which improves the existing results in the literature. Then we derive a lower bound on the exponential synchronization rate, which is proven an increasing function of the pacemaker strength, but may be an increasing or decreasing function of the local coupling strength. In the non-identical natural frequency case, a similar conclusion is obtained on phase locking. In this case, we also prove that relative phases (synchronization error) can be made arbitrarily small by making the pacemaker strength strong enough. The results are independent of oscillator numbers in the network and are confirmed by numerical simulations.
Acknowledgments
The work was supported in part by U.S. ARO (W911NF-07-1-0279), NIH (GM078993), and ICB (W911NF-09-0001) from the U.S. ARO. The content of the information does not necessarily reflect the position or the policy of the Government, and no official endorsement should be inferred.
Contributor Information
Yongqiang Wang, Email: wyqthu@gmail.com.
Francis J. Doyle, III, Email: frank.doyle@icb.ucsb.edu.
References
- 1.Kuramoto Y. Self-entrainment of a population of coupled non-linear oscillators. Int Symp Math Problems Theoret Phys, Lecture Notes Phys. 1975;39:420–422. [Google Scholar]
- 2.Acebrón J, Bonilla L, Vicente C, Ritort F, Spigler R. The Kuramoto model: A simple paradigm for synchronization phenomena. Rev Mod Phys. 2005;77:137–185. [Google Scholar]
- 3.Chopra N, Spong M. On exponential synchronization of Kuramoto oscillators. IEEE Trans Autom Control. 2009;54:353–357. [Google Scholar]
- 4.Scardovi L, Sarlette A, Sepulchre R. Synchronization and balancing on the n-torus. Syst Control Lett. 2007;56:335–341. [Google Scholar]
- 5.Verwoerd M, Mason O. Global phase-locking in finite populations of coupled oscillators. SIAM J Appl Dyn Syst. 2008;7:134–160. [Google Scholar]
- 6.Papachristodoulou A, Jadbabaie A. Synchronization in oscillator networks: switching topologies and non-homogeneous delays. Proc. 49th IEEE Conf. Decision Control; Spain. 2005. pp. 5692–5697. [Google Scholar]
- 7.Rogge J, Aeyels D. Stability of phase locking in a ring of undirectionally coupled oscillators. J Phys A: Math Gen. 2004;37:11135–11148. [Google Scholar]
- 8.Klein D, Lalish E, Morgansen K. On controlled sinusoidal phase coupling. Proc. Amer. Control Conf; USA. 2009. pp. 616–622. [Google Scholar]
- 9.Jadbabaie A, Motee N, Barahona M. On the stability of the Kuramoto model of coupled nonlinear oscillators. Proc. Amer. Control Conf; USA. 2004. pp. 4296–4301. [Google Scholar]
- 10.Lin Z, Francis B, Maggiore M. State agreement for continuous-time coupled nonlinear systems. SIAM J Control Optim. 2007;46:288–307. [Google Scholar]
- 11.Papachristodoulou A, Jadbabaie A, Münz U. Effects of delay in multi-agent consensus and oscillator synchronization. IEEE Trans Autom Control. 2010;55:1471–1477. [Google Scholar]
- 12.Dörfler F, Bullo F. Synchronization and transient stability in power networks and non-uniform Kuramoto oscillators. Submitted to IEEE Trans Autom Control. 2011 available on line:arXiv:0910.5673v4. [Google Scholar]
- 13.DeLellis P, di Bernardo M, Porfiri M. Pinning control of complex networks via edge snapping. Chaos. 2011;21:033119. doi: 10.1063/1.3626024. [DOI] [PubMed] [Google Scholar]
- 14.Childs LM, Strogatz SH. Stability diagram for the forced Kuramoto model. Chaos. 2008;18:043128. doi: 10.1063/1.3049136. [DOI] [PubMed] [Google Scholar]
- 15.Wang YQ, Doyle FJ., III On influences of global and local cues on the rate of synchronization of oscillator networks. Automatica. 2011;47:1236–1242. doi: 10.1016/j.automatica.2011.01.074. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 16.Herzog E. Neurons and networks in daily rhythms. Nat Rev Neurosci. 2007;8:790–802. doi: 10.1038/nrn2215. [DOI] [PubMed] [Google Scholar]
- 17.Kopetz H, Ochsenreiter W. Clock synchronization in distributed real-time systems. IEEE Trans Comput. 1987;36:933–940. [Google Scholar]
- 18.Sakaguchi H. Cooperative phenomena in coupled oscillator systems under external fields. Prog Theor Phys. 1988;79:39–46. [Google Scholar]
- 19.Kori H, Mikhailov A. Entrainment of randomly coupled oscillator networks by a pacemaker. Phys Rev Lett. 2004;93:254101. doi: 10.1103/PhysRevLett.93.254101. [DOI] [PubMed] [Google Scholar]
- 20.Porfiri M, di Bernardo M. Criteria for global pinning-controllability of complex networks. Automatica. 2008;44:3100–3106. [Google Scholar]
- 21.Popovych O, Tass P. Macroscopic entrainment of periodically forced oscillatory ensembles. Prog Biophys Mol Biol. 2011;105:98–108. doi: 10.1016/j.pbiomolbio.2010.09.018. [DOI] [PubMed] [Google Scholar]
- 22.Uchida N, Mainen Z. Speed and acuracy of olfactory discrimination in the rat. Nat Neurosci. 2003;6:1224–1229. doi: 10.1038/nn1142. [DOI] [PubMed] [Google Scholar]
- 23.Wang YQ, Núñez F, Doyle FJ., III Energy-efficient pulse-coupled synchronization strategy design for wireless sensor networks through reduced idle listening. IEEE Trans Signal Process. 2012 doi: 10.1109/TSP.2012.2205685. awailable as preprint. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 24.Wang YQ, Núñez F, Doyle FJ., III Increasing sync rate of pulse-coupled oscillators via phase response function design: theory and application to wireless networks. IEEE Trans Control Syst Technol. 2012 doi: 10.1109/TCST.2012.2205254. awailable as preprint. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 25.Strogatz S. From Kuramoto to Crawford: exploring the onset of synchronization in populations of coupled oscillators. Phys D. 2000;143:1–20. [Google Scholar]
- 26.Godsil C, Royle G. Algebraic graph theory. Springer; Berlin: 2001. [Google Scholar]
- 27.Horn R, Johnson C. Matrix analysis. Cambridge University Press; London: 1985. [Google Scholar]
- 28.Monzón P, Paganini F. Global considerations on the Kuramoto model of sinusoudally coupled oscillators. Proc. 44th IEEE Conf. Decision Control; Spain. 2005. pp. 3923–3928. [Google Scholar]
- 29.Wang YQ, Doyle FJ., III Optimal phase response functions for fast pulse-coupled synchronization in wireless sensor networks. IEEE Trans Signal Process. 2012 doi: 10.1109/TSP.2012.2208109. available as preprint. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 30.Mallada E, Tang A. Synchronization of phase-coupled oscillators with arbitrary topology. Proc. Amer. Control Conf; Baltimore, USA. 2010. pp. 1777–1782. [Google Scholar]
- 31.Sarlette A. PhD thesis. Liége University; 2009. Geometry and symmetries in coordination control. [Google Scholar]
- 32.Chung S, Slotine J. On synchronization of coupled Hopf-Kuramoto oscillators with phase delays. Proc. 49th IEEE Conf. Decision Control; USA. 2010. pp. 3181–3187. [Google Scholar]