

Abstract
Advanced upper-limb prostheses capable of actuating multiple degrees of freedom (DOF) are now commercially available. Pattern recognition algorithms that use surface electromyography (EMG) signals show great promise as multi-DOF controllers. Unfortunately, current pattern recognition systems are limited to activate only one degree of freedom at a time. This study introduces a novel classifier based on Bayesian theory to provide classification of simultaneous movements. This approach and two other classification strategies for simultaneous movements were evaluated using non-amputee and amputee subjects classifying up to three DOFs, where any two DOFs could be classified simultaneously. Similar results were found for non-amputee and amputee subjects. The new approach, based on a set of conditional parallel classifiers was the most promising with errors significantly less (p<0.05) than a single LDA classifier or a parallel approach. For 3-DOF classification, the conditional parallel approach had error rates of 6.6% on discrete and 10.9% on combined motions, while the single LDA had error rates of 9.4% on discrete and 14.1% on combined motions. The low error rates demonstrated suggest than pattern recognition techniques on surface EMG can be extended to identify simultaneous movements, which could provide more life-like motions for amputees compared to exclusively classifying sequential movements.
Index Terms: Electromyography (EMG), Pattern Recognition, Multi-DOF powered prosthesis classification, Simultaneous/Coordinated movements
I. Introduction
Myoelectric prostheses are often used to effectively treat upper-limb amputation, and can provide a more intuitive method of control than traditional body-powered prostheses. Natural limb control involves simultaneous movement of multiple degrees of freedom (DOF), which provides significant functionality during activities of daily living (such as simultaneous hand closing and wrist rotation to turn a door knob). Recent multifunction prosthetic hands [1-5] and advanced arm system prototypes described in the literature (which include 2 DOF wrist units) [6-8] offer the mechanical means to restore such function. However, an intuitive method of control is desirable to direct the multi-DOF movements provided by these devices.
Current clinically-used strategies for myoelectric control may only be extended to provide simultaneous control in a small subset of patients. The most common clinical strategy for single-DOF myoelectric control, known as ‘direct control’, uses the amplitude of a pair of agonist/antagonist EMG signals to directly control the motions of a DOF [9]. Simultaneous control using this method requires at least four ‘control sites’ for surface electrode placement on the residual limb at which the EMG activity of each can be modulated independently of the others. Most patients cannot use direct control methods for simultaneous control, as either they do not have enough independently controllable muscles in the residual limb (as in a transhumeral amputee), or EMG crosstalk prevents independently modulated signals (as in a transradial amputee). Simultaneous myoelectric control using direct control has primarily been implemented clinically in patients who have undergone targeted muscle reinnervation (TMR) surgery [10], as this procedure constructs new control sites that can be independently controlled with decreased crosstalk for two DOFs.
Given the limitations of direct control, several approaches to providing simultaneous multi-DOF commands have been previously investigated to provide classification of simultaneous movements to patients without TMR. Many studies have focused primarily on either combined wrist movements or combined finger movements but few have investigated combined wrist/hand motions that are frequently used during activities of daily living. Artificial neural networks were previously used to predict the joint kinematics [11] and kinetics [12] of the contralateral arm during mirrored bilateral training, but was limited to 3-DOF wrist movements. The activation patterns of underlying muscle synergies have also been used to predict the movement of multiple wrist DOFs [13, 14] or static postures involving multiple finger DOFs [15]. Projection of the EMG signal energy onto an orthonormalized set of principle movement vectors has been investigated to predict combined movements of up to 3 wrist and hand DOFs [16].
In contrast, there has been relatively little investigation into extending pattern recognition control to direct multiple DOFs simultaneously at different joints. Pattern recognition has provided important improvements in myoelectric prosthesis controllability of discrete motions when compared to the current clinical paradigm of amplitude-based direct control by extending the number of DOFs that can be controlled sequentially [17]. This method classifies intended movements by training a classifier to discriminate between features of complex EMG signal patterns. Many different feature set and classifier combinations have been found successful in classifying intended motion classes [18].Pattern recognition systems have subsequently been successfully used to control advanced robotic prostheses[19]. This has been accomplished by using a linear combination of EMG signal amplitudes to provide an estimate of the subjects' proportional control after selecting movement [20] and allowing seamless transitions between classes [17]. The overall pattern recognition system, with smoothing ramp added to accommodate spurious misclassifications, was tested using virtual environments and a physical prosthesis and resulted in a functional system with smooth and continuous control [21].
A limitation of current applications of pattern recognition for myoelectric control, however, is that only one class may be selected for a given classifier. This forces the user to use a combination of sequential movements to command the prosthesis to perform a coordinated task. Such sequential control prevents the user from making fluid, lifelike movements and introduces additional cognitive burden in planning the intended movement. Therefore, while current pattern recognition methods have improved myoelectric prosthesis control from current clinical practices, providing simultaneous DOF control may allow for further improved functionality.
Three previous approaches have been attempted in the literature for applying pattern recognition classification to combined motions. Davidge used a single LDA classifier in which both discrete (1 DOF) movements and combined (2 DOF) movements were labeled as unique classes [22]. No information regarding how the motion classes may be related was used. Using this method, discrete and combined wrist flexion/extension and hand open/closed movements for three of four combinations were successfully classified. A second approach was proposed by Baker et al., where a parallel classification scheme was used. Here, three separate LDA, classifiers were used to predict the motion of three digits simultaneously in a non-human primate [23]. The LDA classifiers in this structure were trained only with discrete motions, using separate subsets of EMG channels for each classifier. A similar architecture of parallel classifiers using support vector machines was also suggested for providing classification of simultaneous movements of an elbow and a wrist/hand [24].
In this study, we propose a new method for classifying combined movements, which employs a parallel set of LDA classifiers that use conditional probabilities to draw boundaries between similar motion classes. Two wrist DOFs, one functional hand-grasp pattern, and their combinations were used. We compare the performance of this new conditional parallel method to those of pattern recognition approaches previously described [22-24].
II. Background
Three types of combined motion pattern recognition strategies were tested, which are referred to as single LDA classification, parallel classification, and conditional parallel classification (Fig. 1).
Fig. 1.
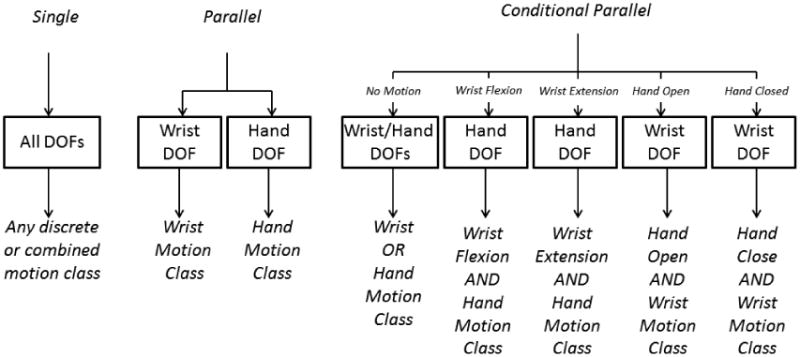
Block diagrams describing each classification strategy for 2-DOF simultaneous wrist and hand movements. This diagram only shows classification strategies for 2 DOFs, but these techniques can be extended to include more DOFs by adding additional classifiers for the parallel and conditional parallel strategies. Each box is an LDA classifier with motion classes from one or more DOFs as indicated by their label. The single LDA classification strategy (left) discriminates all discrete and combined classes as separate motions. The parallel classification strategy (middle) discriminates each DOF individually using two LDA classifiers. The conditional parallel strategy (right) has a separate classifier for each motion class, where each classifier has a class for a specific discrete movement and classes for each combined movement in which the discrete movement is one of the two movements.. The two classifiers that choose the same combination of motions determine the output of the conditional parallel classifiers.
The single classification strategy consists of one LDA classifier in which each of the discrete and each of the combined motions are separate classes. The parallel classification strategy uses one LDA classifier for each DOF, where the decision of each classifier is calculated independently. Each classifier consists of three motion classes: the two opposing motion classes of a DOF and no motion. Each motion class is trained using data from its discrete motion and all combined motions in which it participated. The classification scheme then outputs combined actions when two of the parallel classifiers have active motion classes as output. The architecture of this strategy is notably different from those previously reported [23], which did not use combined motions to train the LDA classifiers, and used some channels for one classifier and others for a different classifier [24]. In this study, all channels were always used for every classification decision.
The conditional parallel strategy is a novel classification system that also uses a parallel set of LDA classifiers, though here a classifier is designated for each discrete motion class. Each classifier discriminates between its designated discrete movement and all combined motion classes that have this discrete movement as a component. Each classifier is therefore conditioned on an a priori assumption that this designated discrete motion class is active. For the example in Figure 1, the wrist flexion conditional classifier chooses between wrist flexion with hand open, wrist flexion with hand closed or wrist flexion alone. The no motion conditional classifier discriminates between all discrete movements and no motion. Each conditional classifier discriminates between a unique set of motion classes, and each motion class is included in only two of the conditional classifiers. When classifying a movement, each of the conditional classifiers chooses a motion class from within its pool of possible classes. The final output of this architecture is the movement class that is selected by both of the conditional classifiers that contain this motion class. Fig. 2 shows a flowchart detailing the exact operations of this classification strategy and the appendix contains algorithms for all classification strategies.
Fig. 2.

Flowchart for Conditional Parallel Strategy. EMG features are sent to each conditional classifier and each classifier outputs two motion classes (note one or both outputs can be no motion). The algorithm checks to see if any classifiers had the same output. If not, no motion is selected. Otherwise, if only two classifiers had the same output, that output is selected. If more than two classifiers had the same output, then maximum likelihood of the pairs selected is performed to choose which pair to select.
III. Methods
A. Experimental Protocol
Six non-amputee subjects (three males and three females) and two transhumeral amputees who had undergone TMR surgery [19, 25] (one male and one female) completed the following experiment that had been approved by the Northwestern University Institutional Review Board. For non-amputee subjects, six pairs of electrodes were placed equidistant from each other around the circumference of the upper forearm approximately 2 cm distal to the elbow. A ground electrode was placed on the olecranon, away from the muscles of interest. For amputees, eight pairs of electrodes were placed on the biceps and triceps, over both naturally and reinnervated sites. All data were collected using a Delsys (Boston, MA) Bagnoli-16 Amplifier. Signals were amplified to a convenient value through hardware, digitally sampled at 1000 Hz and high pass filtered at 20 Hz using a 3rd order Butterworth filter to reduce motion artifact, and acquired using a 16-bit data acquisition system using MATLAB (The Mathworks, Natick, MA).
For non-amputee subjects, the motions performed while EMG data were collected were hand open/close (HO/HC), wrist flexion/extension (WF/WE), wrist pronation/supination (WP/WS), no motion (NM) and all 2-DOF combined motions using these discrete motions. Because transhumeral patients require elbow movements, the motions performed while EMG data were collected for amputees were elbow flexion/extension (EF/EE), HO/HC, WF/WE, NM and all 2-DOF combined motions using these discrete motions. Combined motions involving greater than 2 DOFs were not trained due to subjects reporting difficulty in visualizing such complex motions during pilot data collection, and the impracticality of collecting training data for every combined motion involving more than 2 DOFs. The data collection sessions were guided using visual prompts from custom designed software [26].
The subjects were instructed to make medium, constant force contractions to the best of their ability. No feedback was provided to the subjects during the data collection procedure. Non-amputee subjects were seated for the entire data collection session, with their arms resting in a neutral position on an armchair. Amputee subjects were also seated with their residual limb in a comfortable position parallel to their torso. Subjects were unconstrained and could move their arm or residual limb freely during data collection if desired. Ample rest periods were provided during the data collection process to prevent fatigue. Each motion class was collected four times, each consisting of a three second contraction.
EMG data were divided into 250 ms windows with 50 ms frame increment [17, 27] where each 250 ms window was provided to the classifier as a single example for the training procedure. The EMG data were represented using four time domain (TD) features which were mean absolute value, zero crossing, number of slope sign changes, and waveform length which have been used extensively as a feature set in previous myoelectric pattern recognition literature [17] [17, 28]. Four-fold cross validation was used to test each classification strategy, in that the windows from three of the four contractions of each motion were provided as training, and the windows of a fourth contraction were withheld for testing. This was done such that each contraction was analyzed as the test contraction one time to obtain an average classification across all four repetitions collected. Additionally, a parallel classification strategy trained with only discrete motions was trained and compared to the parallel classification strategy trained with both discrete and combined movements (as described above).
For each of the three classification strategies (see Background), four different DOF configurations were tested on non-amputee subjects. Table I displays these four DOF configurations, which were chosen based on clinical relevance for transradial amputees. The hand DOF is always included as this is a mandatory function; more discrete and combined wrist movements are included in more complex DOF configurations. The most complex configuration allowed for classification of three DOFs, where any movement from two different DOFs could be activated simultaneously. During the data collection for this study, subjects reported that combined wrist movements (WF/WE with WP/WS) felt unnatural and were difficult to conceptualize and perform. Thus, a second three DOF configuration was tested in this study in which these four combined wrist motions were excluded.
Table I. DOF Configurations Tested in this Study.
| Number of DOFs | DOFs | Discrete Motion Classes | Combined Motion Classes |
|---|---|---|---|
| 2 | Hand, Wrist | HO/HC, WE/WF | WE+HO, WE+HC WF+HO, WF+HC |
| 2 | Hand, Rotation | HO/HC, WS/WP | WS+HO, WS+HC WP+HO, WP+HC |
| 3 | Hand, Wrist Rotation | HO/HC, WE/WF WS/WP |
WE+HO, WE+HC WF+HO, WF+HC WS+HO, WS+HC WP+HO, WP+HC |
| 3 | Hand, Wrist Rotation | HO/HC, WE/WF WS/WP |
WE+HO, WE+HC WF+HO, WF+HC WS+HO, WS+HC WP+HO, WP+HC WE+WS, WE+WP WF+WS, WF+WP |
Classes include discrete motions, combined motions, and no motion.
For the parallel classification strategy, the output of the 3 configurations was limited to only produce the two active motion classes (the two with the highest likelihood were chosen). Similarly, for the conditional parallel strategy, if more than one set of two classifiers had the same output, the motion class that had the highest likelihood of the sets was chosen. If none of the conditional parallel classifiers had the same output, the final output was set as no movement.
B. Classification Strategy Evaluation
Offline classification error, defined as the percent of incorrect classifications, was used to evaluate classifier performances. For each of the three combined motion classification strategies, the classification error resulting from testing discrete motions and combined motions were reported for all four DOF configurations. Additionally, the influence of the number of channels on the combined motion strategies was analyzed.
Statistical comparisons were conducted using a general linear model with classification error as the response variable, classifier strategy, DOF configuration, and number of channels as fixed factors, and subject as a random factor. This test was conducted for both 2 and 3 DOF configurations. Post-hoc comparisons with a Bonferroni correction factor were conducted to further analyze differences between significant variables.
IV. Results
A. Classification Strategy Performance
Classification strategy was significant (p < 0.05) for all 2 DOF configurations (Fig 3). All strategies performed significantly better than the parallel strategy (p<0.05) for all conditions. The conditional parallel strategy performed significantly better (p < 0.05) than a single LDA classifier.
Fig. 3.

Discrete motion classification error and combined motion classification error of the three combined motion classifiers for both 2 DOF configurations on non-amputee subjects. Configuration 1 is wrist and hand DOFs and configuration 2 is rotation and hand DOFs. Results are shown for 6 channels of EMG and are an average of six subjects. Error bars show +/- 1 SEM.
All strategies performed significantly better than the parallel strategy in both 3 DOF configurations (p < 0.05) (Fig. 4). The conditional parallel strategy performed significantly better (p < 0.05) than a single LDA classifier for all conditions. Further analysis of the 3 DOF configurations showed that classification error of the combined movements could be significantly (p<0.05) reduced by 4.7 % when wrist and forearm combined motions were removed from the classifier.
Fig. 4.

Discrete motion classification error and combined motion classification error of the three combined motion classifiers for both 3 DOF configurations on non-amputee subjects. Configuration 1 is wrist, rotation and hand DOFs and all combinations except for combinations between rotation and wrist movements and configuration 2 is wrist, rotation and hand DOFs including all possible combined movement combinations. Results are shown for 6 channels of EMG and are an average of six subjects. Error bars show +/- 1 SEM.
Similar results were found for the two transhumeral amputee subjects. For both 2 DOF and 3 DOF configurations (Fig. 5), the parallel strategy had the highest error rates. The conditional parallel strategy had the lowest error rates for all conditions, but reduced more error compared to the single LDA classifier for the 3 DOF configuration than the 2 DOF configuration. Error rates across all conditions tended to be higher with amputees than non-amputee subjects.
Fig. 5.

Discrete and combined motion classification error for two transhumeral amputees. The 2 DOF configuration includes elbow and hand DOFs, and the 3 DOF configuration additionally includes the wrist flexion/extension DOF. Results are shown for an average of the two transhumeral subjects.
For all classification strategies, a significant portion of the combined motion error consisted of choosing correctly one of the two movements and choosing no motion as the second movement. This type of error accounted for, on average across all subjects and configuration, 68.0% of the combined motion error with the conditional parallel strategy. This error also accounted for similarly high percentages of the total combined motion error for the single and parallel classification strategies.
A parallel classification strategy was trained using only discrete motions and tested on combined motions. The error for this classification strategy on two DOFs (wrist and hand) was found to be 81.9% +/- 3.8% SEM on combined motions and 3.4% +/- 1.8% SEM on discrete motions.
B. Effect of the Number of Channels
As expected, for all configurations, the number of channels was significant (p < 0.05). For 2 DOFs, there was a significant decrease in classification error for up to four channels (p < 0.05). There were no significant differences between four, five and six channels for the 2 DOF configurations, though there was a modest (∼2.2%) nonsignificant decrease in classification error on average going from four to six channels. For 3 DOF configurations, there was a significant decrease in classification error for up to five channels (p < 0.05). There was no significant difference between five and six channels, but six channels decreased classification error on average by 1.2% compared to five channels for the 3 DOF configurations.
There was a significant (p < 0.05) interaction between classification strategy and number of EMG channels for both 2 and 3 DOF configurations. This interaction indicated that classification strategy was more important (greater differences between strategies) with a fewer number of channels. The dependency between classification strategy and number of EMG channels is shown (Fig. 6) for a 3 DOF configuration and a similar trend existed across all configurations.
Fig 6.
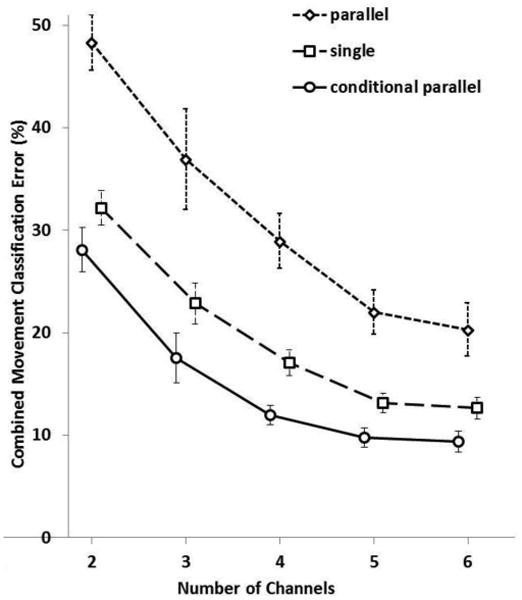
Combined motion classification error of the three combined motion classifiers as a function of number of EMG channels. These data are shown for the 3 DOF configuration consisting of wrist, hand, and rotation DOFs without combined movements between wrist and rotation; however, the same trend existed across all DOF configurations. Results are shown for 6 channels of EMG and are an average of six subjects. Error bars show +/- 1 SEM.
Table II shows the relative reduction in classification error with fewer channels across all subjects. Of the six recorded channels, three were located on the flexor muscle group and three on the extensor muscle group. Large increases in error were observed when more than one channel was removed from either the flexor or the extensor groups.
Table II. Contributions of each Channel.
| Total # of Channels | # on Flexor Group | # on Extensor Group | Increased # of Errors |
|---|---|---|---|
| 6 | 3 | 3 | 0% (baseline) |
| 5 | 2 | 3 | 10.4% |
| 4 | 2 | 2 | 34.7% |
| 3 | 2 | 1 | 95.8% |
| 2 | 1 | 1 | 224.6% |
V. Discussion
Simultaneous myoelectric control has been previously implemented clinically using direct control of multiple independent EMG control sites [10]. However, pattern recognition control offers many benefits, such as the control of a greater number of DOFs. To date, pattern recognition control has been most often presented at the cost of simultaneous control of multiple DOFs.
This study introduced a new strategy and evaluated its classification performance when compared to two other potential classification strategies of simultaneous movements for powered prostheses. The new strategy – the conditional parallel method – demonstrated superior classification performance compared to other techniques. The differences in performance between the three combined motion classification schemes may be explained by the different approaches in which these methods draw boundaries to discriminate between motion classes. Each of the classification methods tested used linear boundaries, and the high training accuracies in the single classification scheme (approximately 95% on average across all DOF configurations) suggest that it is possible to linearly separate the discrete and combined motions investigated in this study. These results are consistent with previous studies that show linear classifiers to perform as well as more complex nonlinear classifiers [29].
Within the conditional parallel architecture, each classifier makes an a priori assumption that one discrete motion class was active. By making such assumptions, each conditional classifier is able to decrease the number of classes that must be discriminated in feature space. This allows for better definition of boundaries between motion classes within any given classifier. The significant benefit of using conditional classifiers for classifying combined motions, likely derives from similarities in EMG patterns in motions that share a discrete component, making it more important to draw precise boundaries between similar motion classes to maintain low error. This is exemplified in Fig. 7. as wrist extension shares a similar EMG pattern to wrist extension combined with hand close. Thus the conditional parallel strategy is able to correctly discriminate between WE and WE/HC while the other two strategies make multiple misclassifications between these two classes. The use of multiple classifiers for this architecture increases the computation burden, but also significantly improves performance compared to the less complex strategies.
Fig. 7.
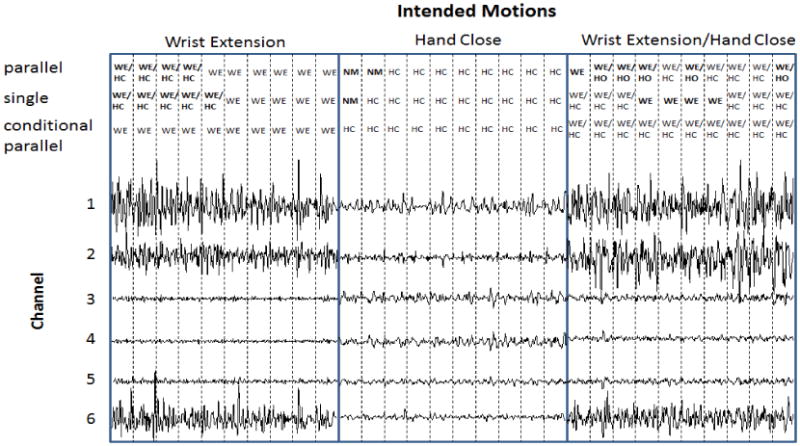
EMG signals for two discrete movements and their combined movement. EMG data is shown from one non-amputee subject and all six channels. Each vertical dotted line divides 50 ms of data, which corresponds to a single classifier decision. A total of 0.5 seconds of data is shown for each motion. The decisions of the parallel, single and conditional parallel strategies are shown for each window. Decisions in bold font were incorrectly classified, while decisions in black (non-bold) were correctly classified.
In contrast, the parallel scheme assumes that the EMG features of motion classes that share at least one active DOF motion (e.g. WF, WF/HO, and WF/HC for a 2 DOF configuration) will be clustered in feature space such that they are linearly separable from motion classes sharing the opposite motion (e.g. WE, WE/HO, and WE/HC) and motion classes with no motion in that DOF (e.g. NM, HO, and HC). The overall poorer performance of the parallel method suggests that this assumption is not always valid. In particular, the classification accuracies for each DOF classifier in the parallel scheme demonstrate that while some DOFs may be well discriminated by this assumption, others, such as the hand DOF–which had 12-13% higher classification error compared to the other DOFs in the parallel strategy–are not. It is not surprising that the single classifier, which does not rely on the assumptions of the parallel scheme or use any the a priori information of the conditional parallel scheme, performed at error rates in between the other two.
The conditional parallel strategy also provided the lowest discrete motion error of the three combined-motion classification schemes (Fig. 3 and 4), further suggesting it as a preferred method for pattern recognition-based classification of simultaneous movement. Though none of the combined motion strategies tested were equivalent to discrete motion error levels seen with sequential classification, the conditional parallel scheme produced approximately 3.7% higher overall classification error (on average across all four DOF configurations for six channels) than sequential classification. Minimizing discrete motion error is an important component of developing a combined- motions controller, as ideally these new methods should provide additional capabilities without impairing the current practice of sequential, discrete motion classification. Furthermore, clinical experience with multi-DOF direct control techniques [10] also suggests that misclassifications of discrete actions into combined actions is very detrimental to performance and is frustrating for the user.
An additional component of classification error with potential significance to real-time performance is the combined motion error where one discrete component is correct and the other is misclassified as no motion. It is anticipated that errors where one of the discrete components is misclassified as “No Motion” will have a less detrimental impact on online performance and user frustration than errors where DOFs are incorrectly activated [30]. Interestingly, this unique subset of error made up over two thirds of the combined motion classification errors observed in this study.
The reduction of classification error achieved by the conditional parallel scheme is most pronounced in situations where the task of discriminating between motion classes is more difficult (i.e. in circumstances where groupings of EMG features are more likely to overlap between classes). EMG features recorded from amputated limbs tend to similarly be less separable than features recorded from intact limbs [31]. The cause of such decreases in motion class separability has not been studied in detail, but may include less experience using pattern recognition systems [32], lack of proprioceptive feedback for producing consistent EMG patterns [33], and decrease in EMG information from altered limb anatomy or muscle atrophy.
For all three classification strategies, there was a significant increase in error when fewer EMG channels were provided to the classifier. For both 2 and 3 DOF configurations, the interaction term between classifier type and number of channels was significant; indicating that the differences in classification error observed between classification strategies depends on the number of channels used. Interestingly, post-hoc tests evaluating the effect of increased channel number on classification error show that all conditions except for combined wrist/hand, classification error may be reduced by increasing up to 5 EMG channels for combined motions, after which no significant benefit is seen. This result differs from previous reports that more than 4 EMG channels provide no significant benefit to reducing classification error when attempting to classify up to 12 discrete postures [34, 35]. This difference is likely attributed to a significant increase in motion classes when combined-motions are added (up to 19 classes in the 3 DOF case), and similarities in EMG patterns between motion classes that share similar activity at a DOF (e.g. WF and WF/HC).
The applications of this work, which investigated classification of simultaneous wrist and hand movements, are primarily targeted to transradial amputees. The successful classification of combined wrist/hand movements in this study is particularly important, given the lack of significant previous work on classifying wrist and hand movements simultaneously. This is also highly relevant given the recently advances in multifunction prosthetic hands and emerging advanced arms that include both rotation and flexion units.
One limitation to the classification strategies presented is the requirement that training data be collected for the combined classes. The parallel classification strategy is the only one presented that has a natural way to develop system that does not require combined motion training data. However, a supplementary analysis found that limiting training data to discrete motions substantially increased the combined motions error to > 80%. This method for training parallel scheme was therefore not used in this study. Other approaches such as the use of muscle synergies may prove beneficial for pattern recognition classification of simultaneous movement to reduce the amount of training data required.
This study was limited to only analyzing the classification abilities of different strategies and did not test online control. Online control is a function not only of classification accuracy, but also the ability to grade the level or speed of the desired motions. However, previous studies have shown a strong correlation between classification accuracy and online controllability [36, 37], and thus classification strategies with higher accuracy tend to yield more controllable systems. The conditional parallel strategy achieved fewer errors than the single strategy across multiple configurations, but the difference in magnitude of the overall classification error rate between the single strategy and the conditional parallel strategy was small, especially for 2-DOF classification. For 3-DOF classification on non-amputee subjects, the conditional parallel approach reduced error rates to 6.6% on discrete and 10.9% on combined motions compared to the single LDA which had error rates of 9.4% on discrete and 14.1% on combined motions. Amputees had a similar amount of decrease in overall classification error, but higher error levels were observed across all strategies. It is likely that these benefits in classification would lead to increased controllability, but additional investigation should be conducted using online control metrics.
This study is also limited the lack of online performance measures. Regardless, the results of this study demonstrate the need for additional investigation into the benefits and practicality of using simultaneous pattern recognition control, in particular the conditional parallel strategy. Therefore, future studies will use a simultaneous pattern recognition controller in real-time, in control subjects and then with both transradial and TMR subjects at the Rehabilitation Institute of Chicago.
Acknowledgments
The authors would like to acknowledge Dr. Todd Kuiken and Blair Lock for their expert advice regarding this study.
This work was supported in part by the NIH under Grant R01-HD-05-8000.
Biographies

Aaron J. Young (S'11) received the B.S. degree and M.S. degrees in biomedical engineering from Purdue University in 2009 and Northwestern University in 2011, respectively.
He is currently working toward the Ph.D. degree at Northwestern University in the Center for Bionic Medicine at the Rehabilitation Institute of Chicago. His research interests include neural signal processing and pattern recognition using advanced machine learning techniques for control of myoelectric prosthesis for the upper and lower limb.

Lauren H. Smith received the B.S. degree in biomedical engineering in 2008 from Northwestern University, Evanston, IL, USA. She is currently pursuing both the M.D. degree and the Ph.D. degree in biomedical engineering at Northwestern University, Chicago, IL, USA. Herresearch interests include neural interface, bioelectric signal analysis, and clinical neurophysiology.

Elliott J. Rouse (S'10-M'12) received the B.S. degree in mechanical engineering from The Ohio State University in 2007, and the M.S. and Ph.D. degrees in biomedical engineering from Northwestern University in 2009 and 2012, respectively.
He is currently a postdoctoral associate in the Biomechatronics Group at the MIT Media Lab, Cambridge MA., where he works on the development of novel robotic prosthetic technologies. His primary research interests include wearable robotics, biomedical system dynamics and identification, medical device design, and machine learning; culminating in the development of technologies to assist and augment human function.

Levi J. Hargrove (S'05-M'08) received his B.Sc. and M.Sc. and PhD degrees in electrical engineering from the University of New Brunswick (UNB), Fredericton, NB, Canada, in 2003 2005, and 2007 respectively.
He joined the Center for Bionic Medicine at the Rehabilitation Institute of Chicago in 2008. His research interests include pattern recognition, biological signal processing, and myoelectric control of powered prostheses. Dr. Hargrove is a member of the Association of Professional Engineers and Geoscientists of New Brunswick. He is also a Research Assistant Professor in the Department of Physical Medicine and Rehabilitation (PM&R) and Biomedical Engineering, Northwestern University. Evanston, IL, USA.
Appendix
A. Algorithm for single LDA strategy
| f ← # of features |
| X ← features measurements at each window; ∈ ℝf |
| MC ← {set of discrete and dual combined motion classes} |
| RETURN(arg max(p(X|MC))) |
B. Algorithm for parallel strategy
| NDOF ← # of DOFs | |
| DOF ← {set of all DOFs} | |
| MC ← {set of discrete and dual combined motion classes} | |
|
| |
| f ← # of features | |
| X ← features measurements at each window; ∈ ℝf | |
| for i=1:NDOF | |
|
| |
| OUTPUT_CLASSi = arg max(p(X|TRAIN_CLASSES)) | |
| end | |
| if sum(OUTPUT_CLASS > 1) > 2 | |
| CLASS(1) = arg max(p(X|OUTPUT_CLASSES)) | |
| CLASS(2) = arg max(p(X|OUTPUT_CLASS ≠ CLASS1)) | |
| else | |
| RETURN(OUTPUT_CLASS) | |
| end |
C. Algorithm for Conditional Parallel Strategy
| f ← # of features |
| X ← features measurements at each window; ∈ ℝf |
| ND ← # of discrete motion classes |
| DMC ← {set of all Discrete Motion Classes} |
| MC ← {set of discrete and dual combined motion classes} |
| for i = 1:ND |
| OUTPUT_CLASS1,i = DMCi |
| OUTPUT_CLASS2,i = arg max(p(X|Movement#1 = DMCi)) |
| end |
| Np ← # of paired of columns in OUTPUT_CLASS |
| P ← {set of all columns appearing twice in OUTPUT_CLASS} ∈ ℝNp |
| if Np = 0 |
| RETURN(No Motion) |
| elseif Np = 1 |
| RETURN(P) |
| elseif Np > 1 |
| RETURN(arg max (p(X|P))) |
| end |
Contributor Information
Aaron J. Young, Email: ajyoung@u.northwestern.edu, the Center for Bionic Medicine at the Rehabilitation Institute of Chicago, Chicago, IL 60611 USA and with the Department of Biomedical Engineering at Northwestern University (phone: 312-238-2415; fax: 312-238-2081).
Lauren H. Smith, Email: lauren-smith@fsm.northwestern.edu, the Center for Bionic Medicine at the Rehabilitation Institute of Chicago, Chicago, IL 60611 USA and with the Feinberg School of Medicine and the Department of Biomedical Engineering at Northwestern University.
Elliott J. Rouse, Email: e-rouse@u.northwestern.edu, the Center for Bionic Medicine at the Rehabilitation Institute of Chicago, Chicago, IL 60611 USA and with the Department of Biomedical Engineering at Northwestern University (phone: 312-238-2415; fax: 312-238-2081).
Levi J. Hargrove, Email: l-hargrove@northwestern.edu, Center for Bionic Medicine at the Rehabilitation Institute of Chicago, Chicago, IL 60611 USA and with the Department of Physical Medicine and Rehabilitation at Northwestern University, Chicago, IL, 60611, USA.
References
- 1.Medynski C, Rattray B. Bebionic Prosthetic Design. 2011 MyoElectric Controls/Powered Prosthetics Symposium; Fredericton, New Brunswick, Canada. 2011. [Google Scholar]
- 2.Schulz S. First Experiences With The Vincent Hand. 2011 MyoElectric Controls/Powered Prosthetics Symposium; Fredericton, New Brunswick, Canada. 2011. [Google Scholar]
- 3.Van Der Niet Otr O, et al. The i-LIMB hand and the DMC plus hand compared: a case report. Prosthetics and Orthotics International. 2010;34:216. doi: 10.3109/03093641003767207. [DOI] [PubMed] [Google Scholar]
- 4.Waryck B. Comparison Of Two Myoelectric Multi- Articulating Prosthetic Hands. 2011 MyoElectric Controls/Powered Prosthetics Symposium; Fredericton, New Brunswick, Canada. 2011. [Google Scholar]
- 5.Miguelez JM. Clinical Experiences With The Michelangelo Hand, A Four-Year Review. 2011 MyoElectric Controls/Powered Prosthetics Symposium; Fredericton, New Brunswick, Canada. 2011. [Google Scholar]
- 6.Resnik L. Research update: VA study to optimize DEKA arm. J Rehabil Res Dev. 2010;47 [PubMed] [Google Scholar]
- 7.Harris A, et al. Revolutionizing Prosthetics software technology. 2011 IEEE International Conference on Systems, Man, and Cybernetics; Anchorage, AK. 2011. pp. 2877–2884. [Google Scholar]
- 8.Kyberd P, et al. Two-degree-of-freedom powered prosthetic wrist. Journal of rehabilitation research and development. 2011;48:609. doi: 10.1682/jrrd.2010.07.0137. [DOI] [PubMed] [Google Scholar]
- 9.Williams TW. Control of Powered Upper Extremity Prostheses. In: Meier RH, Atkins DJ, editors. Functional Restoration of Adults and Children with Upper Extremity Amputation. New York, NY: Demos Medical Publishing; 2004. pp. 207–224. [Google Scholar]
- 10.Kuiken TA, et al. The use of targeted muscle reinnervation for improved myoelectric prosthesis control in a bilateral shoulder disarticulation amputee. Prosthetics and Orthotics International. 2004 Dec;28:245–53. doi: 10.3109/03093640409167756. [DOI] [PubMed] [Google Scholar]
- 11.Muceli S, et al. Multichannel Surface EMG Based Estimation of Bilateral Hand Kinematics during Movements at Multiple Degrees of Freedom. 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology Society; Buenos Aires, Argentina. 2010. pp. 6066–6069. [DOI] [PubMed] [Google Scholar]
- 12.Nielsen JLG, et al. Simultaneous and Proportional Force Estimation for Multifunction Myoelectric Prostheses Using Mirrored Bilateral Training. IEEE Transactions on Biomedical Engineering. 2011 Mar;58:681–688. doi: 10.1109/TBME.2010.2068298. [DOI] [PubMed] [Google Scholar]
- 13.Choi C, Kim J. Development of a Myoelectric Joystick: a Preliminary Study. 2010 3rd IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics; Tokyo, Japan. 2010. pp. 173–178. [Google Scholar]
- 14.Jiang N, et al. Extracting Simultaneous and Proportional Neural Control Information for Multiple-DOF Prostheses From the Surface Electromyographic Signal. IEEE Transactions on Biomedical Engineering. 2009 Apr;56:1070–1080. doi: 10.1109/TBME.2008.2007967. [DOI] [PubMed] [Google Scholar]
- 15.Ajiboye A, Weir R. Muscle synergies as a predictive framework for the EMG patterns of new hand postures. Journal of Neural Engineering. 2009;6:036004. doi: 10.1088/1741-2560/6/3/036004. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 16.Yatsenko D, et al. Simultaneous, proportional, multi-axis prosthesis control using multichannel surface EMG. 29th Annual International Conference fot eh IEEE EMBS; Lyon, France. 2007. pp. 6133–6136. [DOI] [PubMed] [Google Scholar]
- 17.Englehart K, Hudgins B. A robust, real-time control scheme for multifunction myoelectric control. IEEE Transactions on Biomedical Engineering. 2003 Jul;50:848–54. doi: 10.1109/TBME.2003.813539. [DOI] [PubMed] [Google Scholar]
- 18.Scheme E, Englehart K. EMG Pattern Recognition for the Control of Powered Upper Limb Prostheses: State-of-the-Art and Challenges for Clinical Use. Journal of Rehabilitation Research and Development. 2010 doi: 10.1682/jrrd.2010.09.0177. vol. in Submission. [DOI] [PubMed] [Google Scholar]
- 19.Kuiken TA, et al. Targeted muscle reinnervation for real- time myoelectric control of multifunction artificial arms. JAMA. 2009 Feb 11;301:619–28. doi: 10.1001/jama.2009.116. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 20.Hargrove L, et al. The Effect of ECG Interference on Pattern Recognition Based Myoelectric Control For Targeted Muscle Reinnervated Patients. IEEE Transactions on Biomedical Engineering. 2009;56:2197–2201. doi: 10.1109/TBME.2008.2010392. [DOI] [PubMed] [Google Scholar]
- 21.Simon A, et al. A decision-based velocity ramp for minimizing the effect of misclassifications during real-time pattern recognition control. IEEE Transactions on Biomedical Engineering. 2011;58:2360–2368. doi: 10.1109/TBME.2011.2155063. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 22.Davidge K. Multifunction Myoelectric Control Using a Linear Electrode Array. Masters of Science in Engineering, Electrical and Computer Engineering, University of New Brunswick; Fredericton, New Brunswick, Canada: 1999. [Google Scholar]
- 23.Baker JJ, et al. Continuous detection and decoding of dexterous finger flexions with implantable myoelectric sensors. Ieee Transactions on Neural Systems and Rehabilitation Engineering. 2010;18:424–432. doi: 10.1109/TNSRE.2010.2047590. [DOI] [PubMed] [Google Scholar]
- 24.Boschmann A, et al. Development Of A Pattern Recognition- Based Myoelectric Transhumeral Prosthesis With Multifunctional Simultaneous Control Using A Model-Driven Approach For Mechatronic Systems. 2011 MyoElectric Controls/Powered Prosthetics Symposium; Fredericton, New Brunswick, Canada. 2011. [Google Scholar]
- 25.Kuiken TA, et al. Prosthetic Command Signals Following Targeted Hyper-Reinnervation Nerve Transfer Surgery. 27th Annual International Conference of the Engineering in Medicine and Biology Society, 2005 IEEE-EMBS 2005; Shanghai China. 2005. pp. 7652–7655. [DOI] [PubMed] [Google Scholar]
- 26.Kuiken TA, et al. Targeted Muscle Reinnervation for Real- time Myoelectric Control of Multifunction Artificial Arms. Journal of the American Medical Association. 2009 Feb;301:619–628. doi: 10.1001/jama.2009.116. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 27.Smith LH, et al. Determining the Optimal Window Length for Pattern Recognition-Based Myoelectric Control: Balancing the Competing Effects of Classification Error and Controller Delay. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 2011 Apr;19:186–192. doi: 10.1109/TNSRE.2010.2100828. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 28.Hudgins B, et al. A new strategy for multifunction myoelectric control. IEEE Transactions on Biomedical Engineering. 1993 Jan;40:82–94. doi: 10.1109/10.204774. [DOI] [PubMed] [Google Scholar]
- 29.Hargrove L, et al. A Comparison of Surface and Intramuscular Myoelectric Signal Classification. IEEE Transactions on Biomedical Engineering. 2007 doi: 10.1109/TBME.2006.889192. [DOI] [PubMed] [Google Scholar]
- 30.Hargrove L, et al. Multiple Binary Classifications via Linear Discriminant Analysis for Improved Controllability of a Powered Prosthesis. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 2010;18:49–57. doi: 10.1109/TNSRE.2009.2039590. [DOI] [PubMed] [Google Scholar]
- 31.Li G, et al. Quantifying pattern recognition-based myoelectric control of multifunctional transradial prostheses. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 2010 Apr;18:185–92. doi: 10.1109/TNSRE.2009.2039619. 2010. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 32.Bunderson N, Kuiken T. Quantification of Feature Space Changes with Experience during Electromyogram Pattern Recognition Control. IEEE Transaction on Neural Systems and Rehabilitation Engineering. 2012;20:239–246. doi: 10.1109/TNSRE.2011.2182525. [DOI] [PubMed] [Google Scholar]
- 33.O'Riain M, Gibbons D. Position proprioception in a microcomputer-controlled prosthesis. Medical and Biological ENgineering and Computing. 1987;25:294–298. doi: 10.1007/BF02447427. [DOI] [PubMed] [Google Scholar]
- 34.Farrell TR, Weir RF. A comparison of the effects of electrode implantation and targeting on pattern classification accuracy for prosthesis control. IEEE Transactions on Biomedical Engineering. 2008 Sep;55:2198–211. doi: 10.1109/TBME.2008.923917. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 35.Young A, et al. Improving Myoelectric Pattern Recognition Robustness to Electrode Shift by Changing Interelectrode Distance and Electrode Configuration. IEEE Transactions on Biomedical Engineering. 2012;59:645–652. doi: 10.1109/TBME.2011.2177662. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 36.Smith LH, et al. Determining the optimal window length for pattern recognition-based myoelectric control: balancing the competing effects of classification error and controller delay. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 2011;19:186–192. doi: 10.1109/TNSRE.2010.2100828. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 37.Young A, et al. The Effects of Electrode Size and Orientation on the Sensitivity of Myoelectric Pattern Recognition Systems to Electrode Shift. IEEE Transactions on Biomedical Engineering. 2011;58:2537–2544. doi: 10.1109/TBME.2011.2159216. [DOI] [PMC free article] [PubMed] [Google Scholar]