

Abstract
We formulate a Stefan problem on an evolving hypersurface and study the well posedness of weak solutions given L1 data. To do this, we first develop function spaces and results to handle equations on evolving surfaces in order to give a natural treatment of the problem. Then, we consider the existence of solutions for  data; this is done by regularization of the nonlinearity. The regularized problem is solved by a fixed point theorem and then uniform estimates are obtained in order to pass to the limit. By using a duality method, we show continuous dependence, which allows us to extend the results to L1 data.
data; this is done by regularization of the nonlinearity. The regularized problem is solved by a fixed point theorem and then uniform estimates are obtained in order to pass to the limit. By using a duality method, we show continuous dependence, which allows us to extend the results to L1 data.
Keywords: free boundary problems, Stefan problem, parabolic equations on moving hypersurfaces, function spaces for evolving domains
1. Introduction
The Stefan problem is the prototypical time-dependent free boundary problem. It arises in various forms in many models in the physical and biological sciences [1–4]. In this paper, we present the theory of weak solutions associated with the so-called enthalpy approach [1] to the Stefan problem on an evolving curved hypersurface.
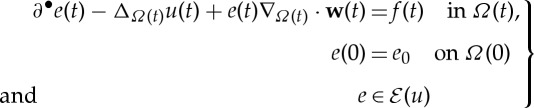
Our interest is in the existence, uniqueness and continuous dependence of weak solutions to the Stefan problem
 |
1.1 |
posed on a moving compact hypersurface  evolving with (given) velocity field w, where the energy
evolving with (given) velocity field w, where the energy  is defined by
is defined by
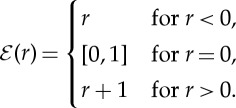 |
Note that  is a maximal monotone graph in the sense of Brézis [5].
is a maximal monotone graph in the sense of Brézis [5].
In (1.1), ∂•e means the material derivative of e (which we shall also write as  ), and ∇Ω(t) and ΔΩ(t) are, respectively, the surface gradient and Laplace–Beltrami operators on Ω(t). The novelty of this work is that the Stefan problem itself is formulated on a moving hypersurface and our chosen method to treat this problem, which we believe is naturally suited to equations on moving domains, requires the use of some new function spaces and results that we shall introduce, building upon the spaces and concepts presented in [6,7]. There is, as alluded to above, a rich literature associated to Stefan-type problems [8–13]. We will show that arguments similar to those used in the standard setting are also amenable to our problem on a moving hypersurface, thanks in part to the function spaces we decide to use. Let us remark that the techniques and functional analysis we develop here can be directly applied to study many other nonlinear PDE problems posed on moving domains.
), and ∇Ω(t) and ΔΩ(t) are, respectively, the surface gradient and Laplace–Beltrami operators on Ω(t). The novelty of this work is that the Stefan problem itself is formulated on a moving hypersurface and our chosen method to treat this problem, which we believe is naturally suited to equations on moving domains, requires the use of some new function spaces and results that we shall introduce, building upon the spaces and concepts presented in [6,7]. There is, as alluded to above, a rich literature associated to Stefan-type problems [8–13]. We will show that arguments similar to those used in the standard setting are also amenable to our problem on a moving hypersurface, thanks in part to the function spaces we decide to use. Let us remark that the techniques and functional analysis we develop here can be directly applied to study many other nonlinear PDE problems posed on moving domains.
Let us work out a possible pointwise formulation of (1.1). Start by supposing Ω(t)=Ωl(t)∪Ωs(t)∪Γ(t), where Ωl(t) and Ωs(t) divide Ω(t) into a liquid and a solid phase (respectively) with an a priori unknown interface Γ(t). The quantity of interest is the temperature  , which we suppose satisfies
, which we suppose satisfies
 |
and thus u=0 is the critical temperature where the change of phase occurs. Define
 |
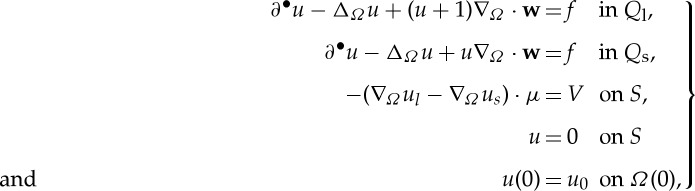
and Qs similarly. Given f and u0, we formally elucidate in remark 2.12 the relationship between (1.1) and the following model describing the temperature u:
 |
1.2 |
where us denotes the trace of the restriction u|Ωs to the interface Γ (likewise with ul), V (t) is the conormal velocity of Γ(t) and μ(t) is the unit conormal vector pointing into Ωl(t) (this vector is tangential to Ω(t) and normal to ∂Ωl(t)).
We now introduce some notions of a weak solution, similar to [10]. The function spaces  below will be made precise in §2 but for now can be thought of as generalizations of Bochner spaces Lp(0,T;X0), where now
below will be made precise in §2 but for now can be thought of as generalizations of Bochner spaces Lp(0,T;X0), where now  implies u(t)∈X(t) for almost all t (for a suitable family {X(t)}t∈[0,T]).
implies u(t)∈X(t) for almost all t (for a suitable family {X(t)}t∈[0,T]).
Definition 1.1 (Weak solution) —
Given
and e0∈L1(Ω0), a weak solution of (1.1) is a pair
such that
and there holds
for all
with
and η(T)=0.

Definition 1.2 (Bounded weak solution) —
Given
and
, a bounded weak solution of (1.1) is a pair
such that (u,e) is a weak solution of (1.1) satisfying
1.3 for all η∈W(H1,L2) with η(T)=0.

We prove the following results.
Theorem 1.3 (Existence of bounded weak solutions) —
If

and
then there exists a bounded weak solution to (1.1).
Theorem 1.4 (Uniqueness and continuous dependence of bounded weak solutions) —
If for i=1,2, (ui,ei) are two bounded weak solutions of (1.1) with data
then
for almost all t.

Theorem 1.5 (Well posedness of weak solutions) —
If
e0∈L1(Ω0) and
then there exists a unique weak solution to (1.1). Furthermore, if for i=1,2,
are two weak solutions of (1.1) with data
then
Below, we shall use the notation ↪ and  to denote (respectively) a continuous embedding and a compact embedding. We will at times refer to the electronic supplementary material where more explanation can be found for the interested reader.
to denote (respectively) a continuous embedding and a compact embedding. We will at times refer to the electronic supplementary material where more explanation can be found for the interested reader.
2. Preliminaries
(a). Abstract evolving function spaces
In [6], we generalized some concepts from [14] and defined the Hilbert space  given a sufficiently smooth parametrized family of Hilbert spaces {H(t)}t∈[0,T]. We need a generalization of this theory to Banach spaces.
given a sufficiently smooth parametrized family of Hilbert spaces {H(t)}t∈[0,T]. We need a generalization of this theory to Banach spaces.
For each t∈[0,T], let X(t) be a real Banach space with X0:=X(0). We informally identify the family {X(t)}t∈[0,T] with the symbol X. Let there be a linear homeomorphism ϕt: X0→X(t) for each t∈[0,T] (with the inverse ϕ−t: X(t)→X0) such that ϕ0 is the identity. We assume that there exists a constant CX independent of t∈[0,T] such that
 |
2.1 |
We assume for all u∈X0 that the map  is measurable.
is measurable.
Definition 2.1 —
Define the Banach spaces
endowed with the norm
2.2

Note that we made an abuse of notation after the definition of the first space and identified  with
with  . That (2.2) defines a norm is easy to see once one checks that the integrals are well defined (the case
. That (2.2) defines a norm is easy to see once one checks that the integrals are well defined (the case  is easy), which can be shown by a straightforward adaptation of the proof of theorem 2.8 in [6] for the case when each X(t) is separable (see also electronic supplementary material, S1) and the proof of lemma 3.5 in [14] for the non-separable case. The fact that
is easy), which can be shown by a straightforward adaptation of the proof of theorem 2.8 in [6] for the case when each X(t) is separable (see also electronic supplementary material, S1) and the proof of lemma 3.5 in [14] for the non-separable case. The fact that  is a Banach space follows from lemma 2.3 below.
is a Banach space follows from lemma 2.3 below.
Important Notation 2.2 —
Given a function
, the notation
will be used to mean the pullback
, and vice versa.
Lemma 2.3 —
The spaces Lp(0,T;X0) and
are isomorphic via ϕ(⋅) with an equivalence of norms:

Proof. —
We show the case
here; an adaptation of the p=2 case done in [6] easily proves the lemma for
(see also electronic supplementary material, S2). Let
. Measurability of
follows as
. Now, by definition, we have that for all t∈[0,T]∖N,
, where N is a null set and
This means that for all t∈[0,T]∖N,
by the assumption (2.1), i.e.
so
. Similarly, we conclude that if
then
. ▪
Remark 2.4 —
The dual operator
is also a linear homeomorphism with
and
[15, theorem 4.5-2 and §4.5], and if X0 is separable,
is measurable for
; thus, in the separable setting, the dual operator also satisfies the same boundedness properties as ϕt. This means that the spaces
are also well-defined Banach spaces given separable {X(t)}t∈[0,T] (the map
plays the same role as ϕ(⋅) did for the spaces
).
The following subspaces will be of use later:
and
(i). Dual spaces
In this subsection, we assume that {X(t)}t∈[0,T] is reflexive. In order to retrieve weakly convergent subsequences from sequences that are bounded in  , we need
, we need  to be reflexive. This leads us to consider a characterization of the dual spaces. We let
to be reflexive. This leads us to consider a characterization of the dual spaces. We let  and (p,q) be a conjugate pair in this section.
and (p,q) be a conjugate pair in this section.
Theorem 2.5 —
The space
is isometrically isomorphic to
and hence we may identify
and the duality pairing of
with
is given by

To prove this theorem, although we can exploit the fact that the pullback is in a Bochner space, showing that the natural duality map is isometric is not so straightforward because ϕ(⋅) is not assumed to be an isometry. In fact, we have to go back to the foundations and emulate the proof for the dual space identification for Bochner spaces [16], §IV.
Lemma 2.6 —
For every
the expression
2.3 defines a functional
such that
.

Proof. —
Let
and define
by (2.3); the integral is well defined by similar reasoning as before (see lemma 2.13 in [6] and the electronic supplementary material, S3). By Hölder’s inequality, we have
so
and
We now show the reverse inequality. First suppose g has the form
where the
and the Ei are measurable, pairwise disjoint and partition [0,T]. It is clear that
Let
which satisfies
and
hence for any ϵ>0 we have
2.4 Now choose xi,t∈X(t),
(see electronic supplementary material, S4) such that
2.5 Define
by
and note that
We obtain using (2.5) and (2.4) that
This proves that
whenever
is of the stated form. Now suppose
is arbitrary. Then there exist
with
such that
in
and so the sequence
satisfies gn→g in
. Because the
, we know by our efforts above that
defined by
has norm
. We also have
which implies
and also
▪


We have shown that  defined by
defined by  is isometric:
is isometric:  . We now show that
. We now show that  is onto. Given
is onto. Given  , define
, define  by
by  for all
for all  . It is obvious that
. It is obvious that  and by the dual space identification for Bochner spaces, there exists an
and by the dual space identification for Bochner spaces, there exists an  such that
such that
 |
so  , where
, where  Hence
Hence  is onto, and we have proved theorem 2.5.
is onto, and we have proved theorem 2.5.
(b). Function spaces on evolving surfaces
We now make precise the assumptions on the evolving surface Ω(t) our Stefan problem is posed on and we discuss function spaces in the context of the previous subsections. For each t∈[0,T], let  be an orientable compact (i.e. no boundary) n-dimensional hypersurface of class C3, and assume the existence of a flow
be an orientable compact (i.e. no boundary) n-dimensional hypersurface of class C3, and assume the existence of a flow  such that for all t∈[0,T], with Ω0:=Ω(0), the map
such that for all t∈[0,T], with Ω0:=Ω(0), the map  is a C3-diffeomorphism that satisfies
is a C3-diffeomorphism that satisfies  and
and  for a given C2 velocity field
for a given C2 velocity field  , which we assume satisfies the uniform bound |∇Ω(t)⋅w(t)|≤C for all t∈[0,T]. A C2 normal vector field on the hypersurfaces is denoted by
, which we assume satisfies the uniform bound |∇Ω(t)⋅w(t)|≤C for all t∈[0,T]. A C2 normal vector field on the hypersurfaces is denoted by  . It follows that the Jacobian
. It follows that the Jacobian  is C2 and is uniformly bounded away from zero and infinity.
is C2 and is uniformly bounded away from zero and infinity.
For  and
and  , define the pushforward
, define the pushforward  and pullback
and pullback  , where
, where  . We showed in [7] that ϕt: L2(Ω0)→L2(Ω(t)) and ϕt: H1(Ω0)→H1(Ω(t)) are linear homeomorphisms (with uniform bounds) and (thus) with L2≡{L2(Ω(t))}t∈[0,T], H1≡{H1(Ω(t))}t∈[0,T] and
. We showed in [7] that ϕt: L2(Ω0)→L2(Ω(t)) and ϕt: H1(Ω0)→H1(Ω(t)) are linear homeomorphisms (with uniform bounds) and (thus) with L2≡{L2(Ω(t))}t∈[0,T], H1≡{H1(Ω(t))}t∈[0,T] and  the spaces
the spaces  ,
,  and
and  are well defined (see [7,17] for an overview of Lebesgue and Sobolev spaces on hypersurfaces) and we let
are well defined (see [7,17] for an overview of Lebesgue and Sobolev spaces on hypersurfaces) and we let  be a Gelfand triple.
be a Gelfand triple.
A function  has a strong material derivative defined by
has a strong material derivative defined by  Given a function
Given a function  , we say that it has a weak material derivative
, we say that it has a weak material derivative
 if
if
holds, and we write  or ∂•u instead of g. Define the Hilbert spaces (see [6,7] for more details)
or ∂•u instead of g. Define the Hilbert spaces (see [6,7] for more details)
 |
endowed with the natural inner products. For subspaces X↪H1 and Y ↪H−1, we also define the subset W(X,Y)⊂W(H1,H−1) in the natural manner.
Lemma 2.7 (See [6,7]) —
Let either X=W(H1,H−1) and
or X=W(H1,L2) and
. For such pairs, the space X is isomorphic to X0 via ϕ−(⋅) with an equivalence of norms:
We showed in [6,7] that, for u, v∈W(H1,H−1), the map t↦(u(t),v(t))L2(Ω(t)) is absolutely continuous, and
 |
holds for almost all t, where the duality pairing is between H−1(Ω(t)) and H1(Ω(t)).
(i). Some useful results
In this subsection, p and q are not necessarily conjugate. The first part of the following lemma is a particular realization of lemma 2.3. Consult the electronic supplementary material, S5–S7, for more details of the next three results.
Lemma 2.8 —
For p,
the spaces
and Lp(0,T;Lq(Ω0)) are isomorphic via the map ϕ(⋅) with an equivalence of norms. If
, the spaces are isometrically isomorphic. The embedding
is continuous.
Lemma 2.9 —
The space W(H1,H−1) is compactly embedded in
.
Theorem 2.10 (Dominated convergence theorem for
) —
Let p,
. Let {wn} and w be functions such that
and
are measurable (e.g. membership of
will suffice). If for almost all t∈[0,T],
then wn→w in
.

Lemma 2.11 —
If u∈W(H1,H−1), then
2.6

Proof. —
By density, we can find {un}⊂W(H1,L2) with un→u in W(H1,H−1). It follows that
(this is sensible because w∈H1(Ω) implies w+∈H1(Ω)) and therefore (2.6) holds for un (see electronic supplementary material, S8). As
, it follows that
in L2(Ω(t)) (for example see [18], lemma 2.88 or [19], lemma 1.22). So we can pass to the limit in the first two terms on the right-hand side.
Now we just need to show that
in
. It is easy to show the convergence in
, so we need only to check the convergence of the gradient. Let g(r)=χ{r>0}. Then, using g≤1,
For the second term, let us note that as un→u in
, for almost all t, un(t,x)→u(t,x) almost everywhere in Ω(t) for a subsequence (which we have not relabelled). Let us fix t. Then for almost every x∈Ω(t), it follows that g(un(t,x))∇Ωu(t,x)→g(u(t,x))∇Ωu(t,x) pointwise (see electronic supplementary material, S9). Because g≤1, the dominated convergence theorem gives overall
in
. ▪
(c). Preliminary results
Remark 2.12 —
It is well known in the standard setting that a mushy region (the interior of the set where the temperature is zero) can arise in the presence of heat sources [1,20]; with no heat sources, the initial data may give rise to mushy regions. We will content ourselves with the following heuristic calculations under the assumption that there is no mushy region.
Let the bounded weak solution of (1.1) (in the sense of definition 1.2) have the additional regularity u∈W(H1,L2) and
and suppose that the sets Ωl(t)={u>0} and Ωs(t)={u<0} divide Ω(t) with a common interface Γ(t), which we assume is a sufficiently smooth n-dimensional hypersurface (of measure zero with respect to the surface measure on Ω(t)). Then the bounded weak solution is also a classical solution in the sense of (1.2). To see this, suppose that (u,e) is a weak solution satisfying the equality in (1.3). The integration by parts formula on each subdomain of Ω implies
2.7 With e(t)η(t)∇Ω⋅w=∇Ω⋅(e(t)η(t)w)−w⋅∇Ω(e(t)η(t)) and the divergence theorem [17], §2.2,
We use this result in the formula for integration by parts over time over Ωs:
A similar expression over Ωl can also be derived this way, the difference being that the term with μ has the opposite sign. Then, using
es(t)|Γ(t)=0, and el(t)|Γ(t)=1, we get
2.8 Since by the partial integration formula
, we have (with g=wie(t)η(t)) that the fourth term in the right-hand side of (2.8) is
so the calculation (2.8) becomes
2.9 Now, taking the weak formulation (1.3) and substituting (2.9) together with the expression for the spatial term (2.7), we get for η with η(T)=η(0)=0
Taking η to be compactly supported in Qs, and afterwards taking η compactly supported in Ql, we recover exactly the first two equations in (1.2). So we may drop the first integral on the left- and the right-hand side. Then with a careful choice of η, we will obtain precisely the interface condition in (1.2).






Lemma 2.13 —
Given ξ∈C1(Ω0) and
satisfying 0<ϵ≤α≤α0 a.e., there exists a unique solution φ∈W(H1,L2) with
to
2.10 satisfying
and (cf. [21, ch. V, §9])
2.11


Proof. —
Define the bilinear form
which is clearly bounded and coercive on H1(Ω(t)). Split a(t;⋅,⋅) into the forms
and
One sees that as(t;η,η)≥0 and that both
and
are bounded. Also, letting
, where
are the normalized eigenfunctions of −ΔΩ0, we have for
,
, αj∈AC([0,T]) and αj′∈L2(0,T)}
where r is such that
(see [17], lemma 2.1; note that
and thus
). Hence by [6, theorem 3.13], we have the unique existence of φ∈W(H1,L2). Rearranging equation (2.10) shows that
. As α is uniformly bounded by positive constants, it follows that
.
The
bound. Let
. Test the equation with (φ−K)+:
which becomes, through the use of Young’s inequality with δ,
An application of Gronwall’s inequality and noticing
yields
. Repeating this process with (−φ(t)−K)+ allows us to conclude.
The inequality (2.11). Multiply equation (2.10) by ΔΩφ and integrate: formally,
2.12 See [17], lemma 2.1 or [7] for the definition of the matrix D(w). This calculation is merely formal because we have not shown that
; however, the end result of the calculation is still valid by lemma 2.14. We also have by squaring (2.10), integrating and using (2.12):
Adding the last two inequalities then we obtain
Gronwall’s inequality can be used to deal with the last term on the right-hand side. ▪


Lemma 2.14 —
With φ∈W(H1,L2) from the previous lemma, the following inequality holds:
2.13

Proof. —
Let
. We start with a few preliminary results. Let us show
Take
so that
. By smoothness of
, it follows that
, and
because
. So η∈W(H2,H1).
Let us also prove that
is dense. Let w∈W(H2,L2); then
since
by smoothness of
and since
(because
). By [22], lemma II.5.10, there exists
with
in
. Then,
(by definition) and
where we used the smoothness of
and the reasoning behind assumption 2.37 of [6] (see also [6, theorem 2.33]).
Given φ∈W(H2,L2), by the density result, there exists
such that φn→φ in W(H2,L2) with φn satisfying (2.13):
2.14 We know that
in
(this is just how we construct the sequence φn; see above), and
[22], lemma II.5.14 implies φn(t)→φ(t) in H1(Ω(t)). Now we can pass to the limit in every term in (2.14). ▪

3. Well posedness
We can approximate  by
by  bi-Lipschitz functions
bi-Lipschitz functions  such that (e.g. [12,13])
such that (e.g. [12,13])
 |
(where  is the Lipschitz constant of the approximation to the Heaviside function). We write
is the Lipschitz constant of the approximation to the Heaviside function). We write  and
and  . In order to prove theorem 1.3, that of the well posedness of
. In order to prove theorem 1.3, that of the well posedness of  weak solutions given bounded data, we consider the following approximation of (1.1).
weak solutions given bounded data, we consider the following approximation of (1.1).
Definition 3.1 —
Find for each ϵ>0 a function eϵ∈W(H1,H−1) such that

Theorem 3.2 —
Given
and e0∈L2(Ω0), the problem (Pϵ) has a weak solution eϵ∈W(H1,H−1).
Proof. —
Using the chain rule on the nonlinear term leads us to consider for fixed w∈W(H1,H−1)
If S denotes the solution map of (P(w)) that takes w↦Sw, then we seek a fixed point of S. First, note that, since the bilinear form involving the surface gradients is bounded and coercive, the solution Sw∈W(H1,H−1) of (P(w)) does indeed exist by [6, theorem 3.6], and, moreover, it satisfies the estimate
3.1 where the constant C does not depend on w because
is uniformly bounded from below (in w). Then the set
which is a closed, convex and bounded subset of X:=W(H1,H−1), is such that S(E)⊂E by (3.3). We now show that S is weakly continuous. Let
in W(H1,H−1) with wn∈E. From the estimate (3.3), we know that Swn is bounded in W(H1,H−1), so for a subsequence
and
by the compact embedding of lemma 2.9. Now we show that χ=Sw. Due to
,
in
. This implies
in L2(Ω0) (to see this consider for arbitrary f∈L2(Ω0) the functional
defined by
). As Swnj(0)=e0, it follows that
3.2 On the other hand, as wn are weakly convergent in W1(H1,H−1), they are bounded in the same space. Now,
, hence wn→w in
. It follows that the subsequence wnj→w in
too, and so there is a subsequence such that, for almost every t∈[0,T], wnjk(t)→w(t) a.e. in Ω(t). By continuity, for a.a. t,
a.e., and also we have
with the right-hand side in
. Thus, we can use the dominated convergence theorem (theorem 2.10), which tells us that
in
. Now we pass to the limit in the equation (P(w)) with w replaced by wnjk to get
which, along with (3.4), shows that χ=S(w), so
. However, we have to show that the whole sequence converges, not just a subsequence. Let xn=S(wn) and equip the space X=W(H1,H−1) with the weak topology. Let xnm=S(wnm) be a subsequence. By the bound of S, it follows that xnm is bounded, hence it has a subsequence such that
By similar reasoning as before, we identify x*=S(w), and theorem 3.3 tells us that indeed
. Then by the Schauder–Tikhonov fixed point theorem [23, theorem 1.4, p. 118], S has a fixed point. ▪


Theorem 3.3 —
Let xn be a sequence in a topological space X such that every subsequence xnj has a subsequence xnjk converging to x∈X. Then the full sequence xn converges to x.
(a). Uniform estimates
We set  . Below we denote by M a constant such that
. Below we denote by M a constant such that  .
.
Lemma 3.4 —
The following bound holds independent of ϵ:
Proof. —
We substitute w(t)=e−λteϵ(t) in (Pϵ) and use
to get
Let
and
and define v(t)=αt+β. Note that
and v(0)=β. Subtracting
from the above and testing with (w(t)−v(t))+, we get
3.3 Note that
because ∇Ωv(t)=0. Set
, then the last term on the left-hand side of (3.5) is non-negative because, if w>v, w>0 since v≥0. So we can throw away that and the gradient term to find
Integrating this and using lemma 2.11, we find
as
and
. The use of Gronwall’s inequality gives
almost everywhere on Ω(t). So we have shown that for all t∈[0,T]∖N1, w(t,x)≤C for all
, where
A similar argument yields for all t∈[0,T]∖N2, w(t,x)≥−C for all
, where
Taking these statements together tells us that for all t∈[0,T]∖N, |w(t,x)|≤C on Ω(t)∖Mt, where N=N1∪N2 and
have measure zero. This gives
. From this and
, we obtain the bound on uϵ. The bound on
follows from
. ▪


Lemma 3.5 —
The following bound holds independent of ϵ:
3.4
Proof. —
Testing with
in (Pϵ), using
, integrating over time and using the previous estimate, we find
The bound on the time derivative follows by taking supremums. See the electronic supplementary material, S10, for more details. ▪

Lemma 3.6 —
Define
. The following limit holds uniformly in ϵ:

Proof. —
We follow the proof of theorem A.1 in [8] here. Fix h∈(0,T) and consider
3.5 with the last inequality by (3.6). Now, as the
are uniformly bounded above, they are uniformly equicontinuous. Therefore, for fixed δ, there is a σδ (depending solely on δ) such that
3.6 So in the set
we must have
(this is the contrapositive of (3.8)). This implies from (3.7) that
Writing
, note that
Taking the limit as h→0, using the arbitrariness of δ>0 and the fact that the right-hand side of the above does not depend on ϵ gives us the result. ▪


(b). Existence of bounded weak solutions
With all the uniform estimates acquired, we can extract (weakly) convergent subsequences. In fact, we find (we have not relabelled subsequences)
 |
3.7 |
where only the first strong convergence listed requires an explanation. Indeed, the point is to apply [24, theorem 5] with H1(Ω0) c ’−→L1(Ω0)⊂L1(Ω0), which gives us a subsequence  strongly in L1(0,T;L1(Ω0)). It follows that uϵj→ρ in
strongly in L1(0,T;L1(Ω0)). It follows that uϵj→ρ in  , whence, for a.a. t, uϵjk(t)→ρ(t) a.e. in Ω(t). We also know that, for a.a. t, |uϵjk(t)|≤C a.e. in Ω(t) by lemma 3.4, and so, for a.a. t, the limit satisfies |ρ(t)|≤C a.e. in Ω(t) too. By theorem 2.10, uϵjk→ρ in
, whence, for a.a. t, uϵjk(t)→ρ(t) a.e. in Ω(t). We also know that, for a.a. t, |uϵjk(t)|≤C a.e. in Ω(t) by lemma 3.4, and so, for a.a. t, the limit satisfies |ρ(t)|≤C a.e. in Ω(t) too. By theorem 2.10, uϵjk→ρ in  for all p,
for all p,  . As
. As  (subsequences have the same weak limit), it must be the case that ρ=u.
(subsequences have the same weak limit), it must be the case that ρ=u.
Proof of theorem 1.3 —
In (Pϵ), we can test with a function η∈W(H1,L2) with η(T)=0, integrate by parts and then pass to the limit to obtain
and it remains to be seen that
or equivalently
By monotonicity of
, we have for any

Because
uniformly, for a.a. t,
a.e. in Ω(t), and
, and the dominated convergence theorem shows that
in
. Using this and (3.9), we can easily pass to the limit in this inequality and obtain
By Minty’s trick we find
; see the electronic supplementary material, S11, for more details. To see why
, we have from the estimate in lemma 3.4 that, for a.a. t∈[0,T],
giving
in
and (by weak-* lower semi-continuity)
for a.a. t, and we just need to identify
. It follows from (3.9) that
in
by Lions–Aubin, and so, for a.e. t and for a subsequence (not relabelled),
in H−1(Ω(t)). This allows us to conclude that χ=ζ (the weak-* convergence of
to
also gives weak convergence in any Lp(Ω(t)) to the same limit). ▪



(c). Continuous dependence and uniqueness of bounded weak solutions
The next lemma, which has an extended proof in the electronic supplementary material, S12, allows us to drop the requirement for our test functions to vanish at time T.
Lemma 3.7 —
If (u,e) is a bounded weak solution (satisfying (1.3)), then (u,e) also satisfies
for all η∈W(H1,L2).

Proof. —
To see this, for s∈(0,T], consider the function
which has a weak derivative χϵ,s′(t)=−ϵ−1χ(s−ϵ,s)(t). Take the test function in (1.3) to be χϵ,Tη, where η∈W(H1,L2), send ϵ→0 and use the Lebesgue differentiation theorem. ▪
We can finally prove theorem 1.4. See the electronic supplementary material, S13–S16, for additional comments on the proof.
Proof of theorem 1.4 —
We can prove the continuous dependence as in [21], ch. V, §9. As explained in lemma 3.7, we drop the requirement η(T)=0 in our test functions and we now suppose that
. Suppose for i=1,2 that (ui,ei) is the solution to the Stefan problem with data
, so
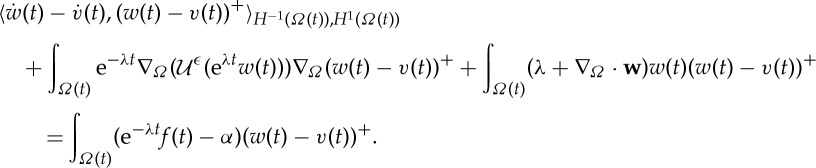
3.8 Define a=(u1−u2)/(e1−e2) when e1≠e2 and a=0 otherwise, and note that 0≤a(x,t)≤1. Let ηϵ solve in
the equation
3.9 with ξ∈C1(Ω0) and where aϵ satisfies ϕ−(⋅)aϵ∈C2([0,T]×Ω0) and 0≤aϵ≤1 a.e. and
. This is well posed by lemma 2.13. Equation (3.10) can be written in terms of aϵ, and if we choose η=ηϵ and use (3.11), we find
3.10 using the
bound from lemma 2.13. We can estimate the first integral on the right-hand side:
and
by the results in lemma 2.13. Sending ϵ→0 in (3.12) gives us (recalling ξ≤1)
Now pick ξ=ξn, where ξn(x)→sign(e1(t,x)−e2(t,x))∈L2(Ω(t)) a.e. in Ω(t). ▪






(d). Well posedness of weak solutions
Proof of theorem 1.5 —
Suppose
are data and consider functions
and
satisfying
The existence of fn holds because, by density, there exist
such that
in L1((0,T)×Ω0)≡L1(0,T;L1(Ω0)). Denote by (un,en) the respective (bounded weak) solutions to the Stefan problem with the data (e0n,fn). By virtue of these solutions satisfying the continuous dependence result, it follows that {en}n is a Cauchy sequence in
and thus en→χ in
for some χ. Recall that
, so, by consideration of an appropriate Nemytskii map, we find
. Now we can pass to the limit in
and doing so gives
overall this shows that there exists a pair
which is a weak solution of the Stefan problem. For these integrals to make sense, we need
with
.
Now suppose that (u1,e1) and (u2,e2) are two weak solutions of class L1 to the Stefan problem with data
and
in
respectively. We know that there exist approximations
,
of the data satisfying
These approximate data give rise to the approximate solutions
and
, both of which are elements of
. It follows from above that
and
in
. Now consider the continuous dependence result that
and
satisfy:
3.11 Regarding the right-hand side, by writing
(and similarly for the
) and using triangle inequality, along with the fact that
in
, we can take the limit in (3.13) as
and we are left with what we desired. ▪


Supplementary Material
Acknowledgements
This work was initiated at the Isaac Newton Institute in Cambridge, UK during the Free Boundary Problems and Related Topics programme (January–July 2014). The authors are grateful to the referees for their useful feedback and encouragement.
Funding
A.A. was supported by the Engineering and Physical Sciences Research Council (EPSRC) grant no. EP/H023364/1 within the MASDOC Centre for Doctoral Training.
References
- 1.Elliott CM, Ockendon JR. 1982. Weak and variational methods for moving boundary problems. Research Notes in Mathematics, no. 59 Boston, MA: Pitman. [Google Scholar]
- 2.Friedman A. 1982. Variational principles and free-boundary problems. New York, NY: John Wiley and Sons, Inc. [Google Scholar]
- 3.Meirmanov AM. 1992. The Stefan problem. Translated from the Russian by Marek Niezgódka and Anna Crowley. de Gruyter Expositions in Mathematics, 3 Berlin, Germany: Walter de Gruyter and Co. [Google Scholar]
- 4.Rodrigues J-F. 1987. Obstacle problems in mathematical physics. North-Holland Mathematics Studies, no. 134 Amsterdam, The Netherlands: North-Holland Publishing Co. [Google Scholar]
- 5.Brézis H. 1973. Opérateurs maximaux monotones et semi-groupes de contractions dans les espaces de Hilbert. North-Holland Mathematics Studies, no. 5 Amsterdam, The Netherlands: North-Holland Publishing Co. [Google Scholar]
- 6.Alphonse A, Elliott CM, Stinner B. 2015. An abstract framework for parabolic PDEs on evolving spaces. Port. Math. 72, 1–46. ( 10.4171/PM/1955) [DOI] [Google Scholar]
- 7.Alphonse A, Elliott CM, Stinner B. In press On some linear parabolic PDEs on moving hypersurfaces. Interfaces Free Bound. [Google Scholar]
- 8.Blanchard D, Porretta A. 2005. Stefan problems with nonlinear diffusion and convection. J. Differ. Equ. 210, 383–428. ( 10.1016/j.jde.2004.06.012) [DOI] [Google Scholar]
- 9.Friedman A. 1968. The Stefan problem in several space variables. Trans. Am. Math. Soc. 133, 51–87. ( 10.1090/S0002-9947-1968-0227625-7) [DOI] [Google Scholar]
- 10.Kamenomostskaja SL. 1961. On Stefan’s problem. Mat. Sb. (N.S.) 53, 489–514. [Google Scholar]
- 11.Oleĭnik OA. 1960. A method of solution of the general Stefan problem. Soviet Math. Dokl. 1, 1350–1354. [Google Scholar]
- 12.Rodrigues J-F, Urbano JM. 1999. On a Darcy–Stefan problem arising in freezing and thawing of saturated porous media. Contin. Mech. Thermodyn. 11, 181–191. ( 10.1007/s001610050110) [DOI] [Google Scholar]
- 13.Rodrigues J-F. 1994. Variational methods in the Stefan problem. In Phase transitions and hysteresis (ed. Visintin A.), pp. 147–212. Lecture Notes in Mathematics, no. 1584 Berlin, Germany: Springer. [Google Scholar]
- 14.Vierling M. 2014. Parabolic optimal control problems on evolving surfaces subject to point-wise box constraints on the control: theory and numerical realization. Interfaces Free Bound. 16, 137–173. ( 10.4171/IFB/316) [DOI] [Google Scholar]
- 15.Kreyszig E. 1978. Introductory functional analysis with applications. New York, NY: John Wiley and Sons. [Google Scholar]
- 16.Diestel J, Uhl JJ. 1977. Vector measures. Mathematical Surveys and Monographs Providence, RI: American Mathematical Society. [Google Scholar]
- 17.Dziuk G, Elliott CM. 2013. L2-estimates for the evolving surface finite element method. Math. Comp. 82, 1–24. ( 10.1090/S0025-5718-2012-02601-9) [DOI] [Google Scholar]
- 18.Carl S, Le VK, Motreanu D. 2007. Nonsmooth variational problems and their inequalities: comparison principles and applications. Springer Monographs in Mathematics New York, NY: Springer. [Google Scholar]
- 19.Heinonen J, Kilpeläinen T, Martio O, 2012. Nonlinear potential theory of degenerate elliptic equations. Dover Books on Mathematics Series Mineola, NY: Dover Publications. [Google Scholar]
- 20.Bertsch M, de Mottoni P, Peletier LA. 1986. The Stefan problem with heating: appearance and disappearance of a mushy region. Trans. Am. Math. Soc. 293, 677–691. ( 10.2307/2000031) [DOI] [Google Scholar]
- 21.Ladyženskaja OA, Solonnikov VA, Ural’ceva NN. 1986. Linear and quasilinear equations of parabolic type. Translations of Mathematical Monographs, no. 23 Providence, RI: American Mathematical Society. [Google Scholar]
- 22.Boyer F, Fabrie P. 2012. Mathematical tools for the study of the incompressible Navier-Stokes equations and related models. Applied Mathematical Sciences New York, NY: Springer. [Google Scholar]
- 23.Emmrich E, Wittbold P. 2009. Analytical and numerical aspects of partial differential equations: notes of a lecture series. De Gruyter Proceedings in Mathematics Series Berlin, Germany: Walter De Gruyter. [Google Scholar]
- 24.Simon J. 1986. Compact sets in the space Lp(0,T;B). Ann. Mat. Pura Appl. 146, 65–96. ( 10.1007/BF01762360) [DOI] [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.