

Abstract
Powered knee and ankle prostheses have the potential to improve the mobility of individuals with a lower limb amputation. As the number of different ambulation modes the prosthesis can be configured for increases, so too does the challenge of how to best transition the prosthesis between these modes. Pattern recognition systems have been suggested as a means to provide seamless and natural transitions, although error rates need to be reduced for these systems to be clinical viable. Delaying mode transitions by a small window may be one way to reduce error rates and improve reliability. The goal of this study was to develop and test a system for powered lower limb prostheses that introduced a delay between mode transitions. Three transfemoral amputees used a knee-ankle prosthesis to stand, walk on level ground, ascend/descend a ramp, and ascend/descend stairs. On Day 1 mode transitions occurred at a gait event (e.g., heel contact), and on Day 2 mode transitions occurred 90 ms following a gait event. A mode-specific pattern recognition system was trained and tested on each day. The 90 ms transition delay did not negatively affect users’ performance ambulating with the prosthesis. Offline classification error results showed that the 90 ms delay reduced overall classification errors from 1.30% [0.29%], mean [SD], for the non-delayed system to 0.42% [0.22%] for the delayed system. These results demonstrate that delaying mode transitions by a small window of time can reduce overall errors, which moves these systems one step closer to clinical viability.
I. Introduction
Over the last decade, research on and development of powered lower limb prostheses have been on the rise [1–3]. The overall goal of these devices is to improve the mobility and function of individuals with a lower limb amputation. Studies investigate how these devices should be controlled within an ambulation mode (e.g., walking, stair climbing, sit-to-stand) and demonstrate their benefits for assisting users with performing demanding tasks that require net positive mechanical work. The potential benefits include achieving more normal and symmetric gait kinematics and kinetics [4–8].
An essential part of the control of these powered prostheses is how well they can transition between different ambulation modes. Transition reliability is necessary for these devices to be seamlessly integrated into an amputee user’s activities of daily living. Using a key fob or making an exaggerated lower limb movement to transition between modes [1, 9] can be reliable, although it is cumbersome to the user and does not provide them with the ability to perform these transitions naturally. While pattern recognition algorithms can create seamless transitions, error rates for mode transition steps remain higher than for steady-state steps [10–12]. Overall system error rates need to be reduced before these systems are clinically viable.
Predicting upcoming mode transitions is challenging. In current systems, these algorithms predict the transition using data prior to heel contact, toe off, or other gait events [11, 13, 14]. For example, while a user is transitioning from level-ground walking to descending stairs, the pattern recognition system needs to predict ‘stair descent’ at heel contact of the prosthesis on the first stair. The prosthesis would then change its mechanical response such that a user could ride the knee down and descend stairs with a reciprocal gait. The timing of this transition was dictated by the assumption that the prosthesis needed to be in ‘stair descent’ mode prior to the user shifting weight onto the prosthesis. With a system configured in this way, the window of data the pattern recognition system is using to predict the upcoming ambulation mode does not contain any information of the prosthesis on the new surface (e.g., stair).
More recent investigations into transition steps highlight a potential critical timing window [15, 16] in which the prosthesis can safely switch from one ambulation mode to another. It is possible that delaying the transition by a small window of time may not affect user performance. Moreover, delaying this transition would allow data of the new surface to be used in the pattern recognition system. This small amount of data on the new surface likely would contain information that could better separate the ambulation modes and potentially reduce system errors.
The goal of this study was to develop and test a system for powered lower limb prostheses that allowed for delayed mode transitions. Three transfemoral amputees used a powered knee-ankle prosthesis to perform a series of tasks involving six modes (standing, level-ground walking, ramp ascent, ramp descent, stair ascent, and stair descent) on two separate testing days. On Day 1, mode transitions occurred at a gait event (e.g., heel contact) and on Day 2, mode transitions occurred after a small (i.e., 90 ms) delay following a gait event. Two separate mode-specific pattern recognition systems [17] were trained and tested. We hypothesized that the system trained and tested with delayed mode transitions would result in fewer errors than the system trained and tested with non-delayed mode transitions.
II. Methods
A. Experimental Protocol
Three individuals with a unilateral transfemoral amputation (48.7 [22.7] years old, 30.7 [19.9] years post amputation, 74.1 [19.0] kg, mean [SD]) participated in this experiment. Users provided written informed consent to participate. They all were community ambulators who had experience walking on a powered knee-ankle prosthesis.
All patients were fit to a third generation powered knee-ankle prosthesis designed by Vanderbilt University [3, 18] (Fig. 1). The prosthesis was controlled with an impedance-based model of the knee and ankle joints. Joint torque, τ, was calculated according to:
| (1) |
where i corresponded to the knee or ankle joint, θ was the joint angle, and θ̇ was the joint angular velocity. Impedance parameters, stiffness, k, equilibrium angle, θe, and damping coefficient, b, were modified within a finite state.
Fig. 1.
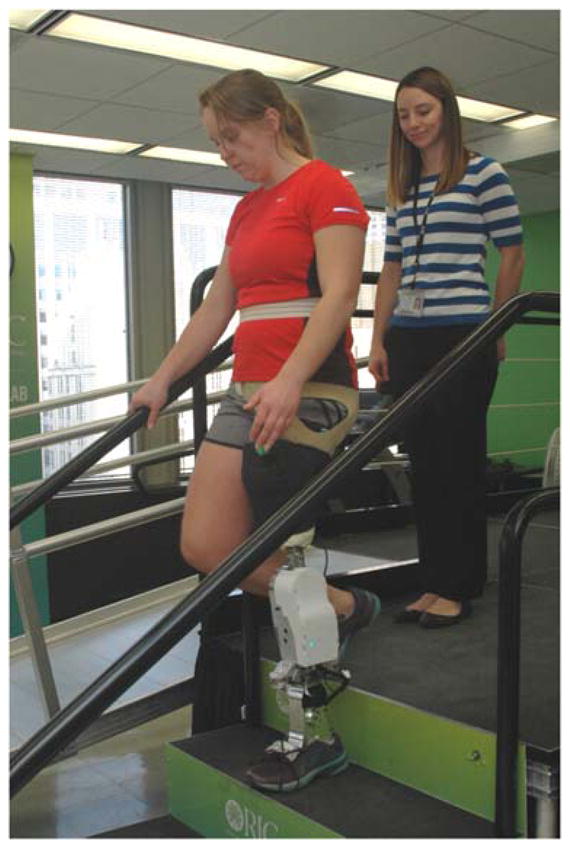
A transfemoral amputee user wearing the powered knee-ankle prosthesis.
The finite state machine consisted of six modes including standing, level-ground walking, ramp ascent/descent, and stair ascent/descent. Each mode had at least one swing and stance phase and used mechanical sensor data including axial load, ankle and knee angles and velocities to trigger between phases [3, 6, 7, 11, 19]. Impedance parameters were configured for a biomechanically appropriate prosthesis response in each mode [8, 19]. Transitions between ambulation modes occurred either instantaneously at or 90 ms following one of four gait events (i.e., heel contact, mid-stance, toe off, or mid-swing). The finite state machine system evaluated mechanical sensor data every 30 ms; a 90 ms delay represented 3 frames of data. The length of the delay was determined following pilot tests and selected to include a small window of data after the gait event but not to be perceived as a functional delay by the user.
Users participated in a two-day experiment. On each day they performed a series of ambulation tasks including 1) 10 trials of level-ground walking at slower, self-selected, and faster speeds, 2) 5 trials of standing including shuffling and lateral stepping, 3) 20 trials of a circuit which included level walking, ascending/descending a 10 degree incline, and ascending/descending a 4-step or 3-step staircase, 4) 4 trials of climbing stairs in a stairwell, and 5) 20 trials of ascending/descending two stairs with a standing approach. The experimenter manually transitioned (via a key fob input) the prosthesis between ambulation modes at one of the four gait events. For Day 1, these mode transitions occurred instantaneously at the aforementioned gait events (i.e., Non-Delayed System) and for Day 2 these mode transitions occurred following a 90 ms delay (Delayed System). Users were not told of the transition delay for Day 2.
B. Data analysis
During all tasks, data were recorded from mechanical sensors embedded on the knee-ankle prosthesis. These data, recorded at 500 Hz, included knee and ankle joint angles and velocities, motor currents, prosthesis acceleration and rotational velocity, calculated thigh and shank inclination angles, and a six degree-of-freedom load cell. Kinematic and kinetic data were compared at 250 ms after a gait event to see the effect, if any, that delaying mode transitions had on the user’s ambulation.
A mode-specific classification structure was used to evaluate the performance of each systems. [17]. A separate classifier was trained for each ambulation mode and the available mode transitions at a gait event. Level-ground walking and ramp ascent data were treated as one class [6, 20]. This data grouping was chosen because these two modes had similar impedance parameter settings [19]. Data were segmented into 300 ms windows immediately before heel contact and toe off for the Non-Delayed System (e.g., from 300 ms before heel contact to heel contact) and 210 ms before heel contact and toe off for the Delayed System (e.g., from 210 ms before heel contact to 90 ms after heel contact). Six time domain features (mean, standard deviation, maximum and minimum values and initial and final values) were extracted from each analysis window [14]. Principal component analysis was used for feature reduction [21]. Dynamic Bayesian Network (DBN) classifiers were trained [10] using leave-one-out cross validation.
Classification error was calculated for each classifier and compared between the Non-Delayed and Delayed data sets. To better compare to previous systems, error rates were averaged across classifiers and each of the four gait events (heel contact, mid-stance, toe off, and mid-swing) and separated into steady state and transition errors. Steady-state errors were calculated as the percentage of steps that were misclassified when the user was not changing ambulation modes and transition errors were calculated as the percentage of steps that were misclassified when the user was transitioning between two ambulation modes.
III. Results
All users were successful performing all ambulation tasks on both days. Knee and ankle kinematics were similar for the Non-Delayed and Delayed systems for the heel contact classifier (Fig. 2, top and middle) (Table I). Users did not perceive a delay when transitioning from walk to ramp descent, ramp descent to walk, walk to stair descent, stair descent to walk, or stand to stair descent transitions. There was a perceptible delay in prosthetic knee and ankle joint angles for the toe off classifier (Fig, 2, bottom) (Table I) during stand to stair ascent and walk to stair ascent transitions. While this delay was noticeable to the clinicians, it did not negatively affect users’ performance or detract from them performing a seamless and natural transition to stair ascent.
Fig. 2.

Axial load and prosthetic joint angles for one user during ambulation mode transition steps for the Walk to Ramp Descent transition (top), Walk to Stair descent transition (middle), and Stand to Stair Ascent (bottom). Non-Delayed System data are shown in dashed lines and Delayed System data are shown in solid lines Shaded regions are one standard deviation from the mean. Resultant kinematics and axial load trajectories are similar for delayed heel contact mode transitions. A slight delay can be seen for delayed toe off stair ascent mode transitions.
TABLE I.
Comparison of Prosthetic Joint Angles (in degrees) 250 ms Following a Mode Transition
| Transition | Knee Angle | Ankle Angle | ||
|---|---|---|---|---|
|
| ||||
| Nondelay | Delay | Nondelay | Delay | |
|
| ||||
| Heel Contact | ||||
| LW to RD | 0.7 [3.2] | 0.3 [3.4] | 1.9 [2.2] | 2.4 [3.3] |
| RD to LW | 0.7 [3.0] | 0.6 [3.3] | −1.0 [0.3] | −1.4 [1.2] |
| LW to SD | 2.7 [0.2] | 1.7 [0.8] | 1.2 [0.5] | 0.6 [0.5] |
| SD to LW | 0.6[2.0] | 1.5 [2.6] | −0.9 [0.1] | −1.2[0.4] |
| ST to SD | 5.2[1.1] | 4.7 [0.8] | 1.1 [0.9] | 1.2 [0.8] |
| Toe off | ||||
| LW to SA | 60.6 [1.9] | 46.3 [7.5] | 15.4 [3.4] | 14.7 [2.7] |
| ST to SA | 48.4 [3.8] | 26.9 [2.8] | 25.9 [1.6] | 26.7 [0.8] |
| Mid-Swing | ||||
| SA to LW | 28.6 [1.1] | 40.5 [2.0] | −24.1 [1.2] | −24.6 [0.5] |
| Mid-Stance | ||||
| SD to LW | 7.0 [6.7] | 14.5 [11.5] | 10.7 [10.6] | 15.2 [14.1] |
LW: level-ground walking; SD: stair descent; SA: stair ascent;; RD: ramp descent, ST: stand
Delaying classification decisions by 90 ms reduced overall classification errors from 1.30% [0.29%], mean [SD], for the Non-Delayed System to 0.42% [0.22%] for the Delayed System (Fig. 3). A similar trend was observed for steady-state steps and transition steps, with transitional error rates higher than steady-state error rates (Fig. 3, Fig. 4). For the Delayed System, steady-state error rates on average were under 1% and transitional error rates on average were under 2%. Comparing across all four gait events, the heel contact classifiers showed the highest reduction in error rates when decisions were delayed by 90 ms (Fig. 4).
Fig. 3.
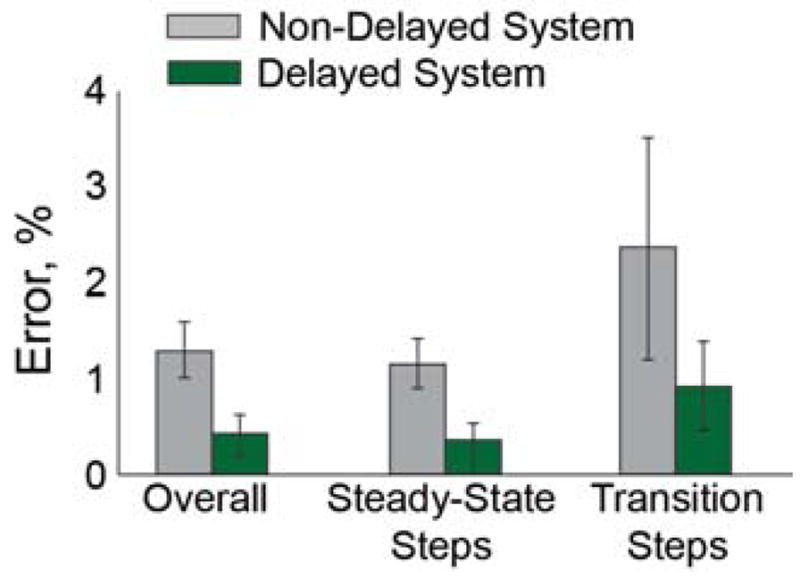
Overall, steady-state, and transitional classification error. The Delayed System resulted in less errors compared to the Non-Delayed System. Error bars indicate standard deviation.
Fig. 4.

Average effect of Non-Delayed vs. Delayed system on steady-state (left) and transitional (right) classification error separated by gait event. Error bars indicate standard deviation. Note different vertical axis scaling between the left and right figures. There were zero steady-state and transitional errors for the classifier acting at mid-stance and zero transitional errors for the classifier acting at mid-swing.
IV. Discussion
All users were successfully able to transition between standing, level-ground walking, ramp ascent, ramp descent, stair ascent, and stair descent both when the prosthesis mode transitioned immediately following a gait event (e.g., heel contact) and when the transition was delayed by 90 ms after a gait event. User feedback indicated that the delayed mode transitions did not affect user’s stability. Gait kinematics revealed no difference in joint angles or weight transfer onto the prosthesis for mode transitions that occurred at heel contact. A slight delay in joint kinematics can be seen for mode transitions that occurred at toe off.
Delaying mode transitions had a positive effect on the performance of the intent recognition system. Overall classification error rates were reduced from 1.3% for the Non-Delayed System (i.e., Day 1 data) to 0.4% for the Delayed System (i.e., Day 2). Likely this reduction in classification error is due to the differences in the data following a gait event. For the heel contact classifier, this delayed window of data contained information about the prosthesis and user response once the prosthesis made contact with the new surface (e.g., a stair or a ramp). For the toe off classifier, the delayed window of data contained information about how the user was unloading the prosthesis and information about what they were beginning to do once the prosthesis was fully unloaded (e.g., rapidly flexing their hip in order to transition to stair climbing). While it is possible that a much longer delay can further reduce error rates, it likely will begin to negatively affect the user’s gait. A long delay could be perceived by the user as a functional delay, and a transition outside the critical timing window may affect the user’s walking balance [16].
There are some limitations with this study. The results compare pattern recognition systems trained and tested with separate days of data. This was done in order to compare gait kinematics of transitions between Delayed and Non-Delayed systems. Additionally, more users need to be tested to confirm that a 90 ms delay does not negatively affect their performance while ambulating on the knee-ankle prosthesis. Finally, this study reports offline error rates. The delayed system still needs to be tested in real-time, although we expect to see a similar trend since lower limb intent recognition systems have been shown to have carry over from offline to online performance [11].
V. Conclusion
This study developed and tested an intent recognition system for powered prostheses that allowed for delayed mode transitions. Three individuals with a transfemoral amputation successfully used a powered knee-ankle prosthesis to transition between standing, level walking, ascending/descending a ramp, and ascending/descending stairs. The results demonstrated that delaying ambulation mode decisions by 90 ms did not negatively affect users’ gait and did reduce pattern recognition system prediction errors. These results are encouraging because they provide an additional way to improve intent recognition systems.
Acknowledgments
This work was supported by the National Institutes of Health NIH R01 HD079428-02 and the US Army’s Joint Warfighter Program contract W81XWH-14-C-0105.
The authors thank Suzanne Finucane, PTA, and Elizabeth Halsne, CPO, for their assistance.
Contributor Information
Ann M. Simon, Rehabilitation Institute of Chicago, Chicago, IL, USA. Department of Physical Medicine and Rehabilitation, Northwestern University, Chicago, IL USA.
John A. Spanias, Rehabilitation Institute of Chicago, Chicago, IL, USA. Department of Biomedical Engineering, Northwestern University, Evanston, IL, USA.
Kimberly A. Ingraham, Rehabilitation Institute of Chicago, IL, USA. She is now with the Department of Mechanical Engineering, University of Michigan, Ann Arbor, MI, USA
Levi J. Hargrove, Rehabilitation Institute of Chicago, Chicago, IL, USA. Department of Physical Medicine and Rehabilitation, Northwestern University, Chicago, IL USA. Department of Biomedical Engineering, Northwestern University, Evanston, IL, USA.
References
- 1.OSSUR; The POWER KNEE, editor. The POWER KNEE. http://bionics.ossur.com/Products/POWER-KNEE/SENSE.
- 2.Au S, Herr H. On the design of a powered ankle-foot prosthesis. The Importance of series and parallel motor elasticity. IEEE Magazine. 2008 in press. [Google Scholar]
- 3.Sup F, Varol HA, Mitchell J, Withrow TJ, Goldfarb M. Preliminary Evaluations of a Self-Contained Anthropomorphic Transfemoral Prosthesis. IEEE ASME Trans Mechatron. 2009;14:667–676. doi: 10.1109/TMECH.2009.2032688. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 4.Simon AM, Fey NP, Ingraham KA, Finucane SB, Halsne EG, Hargrove LJ. Improved weight-bearing symmetry for transfemoral amputees during standing up and sitting down with a powered knee-ankle prosthesis. Arch Phys Med Rehabil. 2015 Dec 10; doi: 10.1016/j.apmr.2015.11.006. [DOI] [PubMed] [Google Scholar]
- 5.Au S, Berniker M, Herr H. Powered ankle-foot prosthesis to assist level-ground and stair-descent gaits. Neural Networks. 2008;21:654–666. doi: 10.1016/j.neunet.2008.03.006. [DOI] [PubMed] [Google Scholar]
- 6.Sup F, Varol HA, Goldfarb M. Upslope walking with a powered knee and ankle prosthesis: initial results with an amputee subject. IEEE Trans Neural Syst Rehabil Eng. 2011 Feb;19:71–8. doi: 10.1109/TNSRE.2010.2087360. [DOI] [PubMed] [Google Scholar]
- 7.Lawson B, Varol A, Huff A, Erdemir E, Goldfarb M. Control of Stair Ascent and Descent with a Powered Transfemoral Prosthesis. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 2013;21 doi: 10.1109/TNSRE.2012.2225640. [DOI] [PubMed] [Google Scholar]
- 8.Fey NP, Simon AM, et al. Controlling knee swing initiation and ankle plantarflexion with an active prosthesis on level and inclined surfaces at variable walking speeds. IEEE Journal of Translational Engineering in Health and Medicine. 2014;2:1–12. doi: 10.1109/JTEHM.2014.2343228. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 9.I Otto Bock Orthopedic Industry. Manual for the 3c100 Otto Bock C-LEG. Duderstadt; Germany: 1998. [Google Scholar]
- 10.Young AJ, Simon AM, Fey NP, Hargrove LJ. Intent recognition in a powered lower limb prosthesis using time history information. Ann Biomed Eng. 2014 Mar;42:631–41. doi: 10.1007/s10439-013-0909-0. [DOI] [PubMed] [Google Scholar]
- 11.Hargrove LJ, Young AJ, Simon AM, Fey NP, Lipschutz RD, Finucane SB, et al. Intuitive control of a powered prosthetic leg during ambulation: a randomized clinical trial. JAMA. 2015 Jun 9;313:2244–52. doi: 10.1001/jama.2015.4527. [DOI] [PubMed] [Google Scholar]
- 12.Young AJ, Simon AM, Hargrove LJ. A training method for locomotion mode prediction using powered lower limb prostheses. IEEE Trans Neural Syst Rehabil Eng. 2014 May;22:671–7. doi: 10.1109/TNSRE.2013.2285101. [DOI] [PubMed] [Google Scholar]
- 13.Huang H, Kuiken T, Lipschutz R. A Strategy for Identifying Locomotion Modes using Surface Electromyography. IEEE Trans Biomed Eng. 2009 Jan;56:65–73. doi: 10.1109/TBME.2008.2003293. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 14.Varol HA, Sup F, Goldfarb M. Multiclass Real-Time Intent Recognition of a Powered Lower Limb Prosthesis. IEEE Transactions on Biomedical Engineering. 2010;57:542–551. doi: 10.1109/TBME.2009.2034734. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 15.Huang H, Zhang F, Hargrove LJ, Dou Z, Rogers DR, Englehart KB. Continuous Locomotion-Mode Identification for Prosthetic Legs Based on Neuromuscular-Mechanical Fusion. IEEE Transactions on Biomedical Engineering. 2011 Oct;58:2867–2875. doi: 10.1109/TBME.2011.2161671. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 16.Zhang F, Liu M, Huang H. Investigation of Timing to Switch Control Mode in Powered Knee Prostheses during Task Transitions. PLoS One. 2015;10:e0133965. doi: 10.1371/journal.pone.0133965. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 17.Young A, Hargrove L. A Classification Method for User-Independent Intent Recognition for Transfemoral Amputees Using Powered Lower Limb Prostheses. IEEE Trans Neural Syst Rehabil Eng. 2015 Mar 16; doi: 10.1109/TNSRE.2015.2412461. [DOI] [PubMed] [Google Scholar]
- 18.Lawson B, Mitchell J, Truex D, Shultz A, Ledoux E, Goldfarb M. A robotic leg prosthesis. Robotics & Automation Magazine; 2014. [Google Scholar]
- 19.Simon AM, Ingraham KA, Fey NP, Finucane SB, Lipschutz RD, Young AJ, et al. Configuring a powered knee and ankle prosthesis for transfemoral amputees within five specific ambulation modes. PLoS One. 2014;9:e99387. doi: 10.1371/journal.pone.0099387. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 20.Young AJ, Simon A, Hargrove LJ. An intent recognition strategy for transfemoral amputee ambulation across different locomotion modes. Conf Proc IEEE Eng Med Biol Soc. 2013;2013:1587–90. doi: 10.1109/EMBC.2013.6609818. [DOI] [PubMed] [Google Scholar]
- 21.Jolliffe IT. Principal Component Analysis. 2. New York: Springer-Verlag; 2002. [Google Scholar]