

Abstract
When learning a new skill, even if we have been instructed exactly what to do, it is often necessary to practice for hours or even weeks before we achieve proficient and fluid performance. Practice has a multitude of effects on behavior, including increasing the speed of performance, rendering the practiced behavior habitual and reducing the cognitive load required to perform the task. These effects are often collectively referred to as automaticity. Here, we argue that these effects can be explained as multiple consequences of a single principle: caching of the outcome of frequently occuring computations. We further argue that, in the context of more complex task representations, caching different intermediate computations can give rise to more nuanced behavioral signatures, including dissociation between skill, habit and cognitive load.
Introduction
The multiple effects of practice
Acquiring any new motor skill requires practice. It is not enough to simply be instructed how to drive a car or how to play a new video game; many hours of practice are typically needed to achieve proficiency and fluidity. What attributes of performance are improved through practice? Most obviously, being skilled at a task involves being able to select appropriate actions [1,2], and to execute those actions accurately [3–5]. However, a further critical aspect of skill relates to the speed at which an appropriate action can be selected. A novice driver will know to press the brake pedal to slow down, but an experienced driver will be far quicker to hit the brakes in the face of an unexpected hazard.
It has long been recognized that practice not only promotes incremental performance gains, but also leads to a qualitative change in how behavior is generated. A given task seems to require less and less cognitive effort the more we practice it [6–8]. Driving a car for the first time can feel overwhelming but, after sufficient practice, we have no problem talking to a passenger or listening to the radio while we drive. This familiar experience occurs in almost any skill we practice; as our proficiency increases, the cognitive burden decreases.
The diminishing cognitive load of a task, has been studied through the use of dual tasks [9]. In this approach, participants are asked to perform the practiced task at the same time as a cognitively demanding secondary task, such as counting the number of vowels heard in a sequence of spoken letters, or counting backwards from 100 in increments of 7. Early in learning, performance on either or both tasks suffers when they are attempted concurrently. After sufficient practice, however, it usually becomes possible to perform both tasks simultaneously just as well as they can be performed in isolation [10–12].
Another important phenomenon associated with practice is that it is associated with the formation of habits. Habits are most commonly studied in operant learning tasks in which an animal must learn through experience which action to perform to earn a reward (e.g. which lever triggers delivery of a food pellet). In this context, habitual behavior is typically defined as behavior that is insensitive to changes in the goals of a task [13–15] (and, by definition, opposite from goal-directed behavior). If a rat has repeatedly pressed a particular lever to earn a food reward, it may continue to press it habitually even when it is not hungry. Such habits are often exposed in daily life when the environment changes. For instance, when driving abroad, if the steering wheel is on the opposite side of the car, you may find yourself habitually reaching towards the door when trying to shift gears or pull the handbrake. The habitual nature of skilled typing is similarly unmasked if one tries to type on a foreign keyboard, in which certain symbols might be mapped onto different keys. This key-switch manipulation is in fact often directly used in experiments in humans to assess whether a practiced visuomotor association has become habitual [16–18].
Assessing whether or not behavior is habitual can be complicated by the fact that behavior is known to be generated through a combination of habitual and goal-directed processes [14,19–21] and a learned habit can be easily masked by more deliberate, goal-directed influences on behavior. One way to reveal latent habitual behavior is to limit the amount of time available to generate a response to a stimulus. For instance, if participants practice distinguishing between different stimuli, or categories of stimuli, by pressing particular buttons over multiple days or weeks, habitual errors following a button-switch are relatively scarce when participants are allowed to respond under self-paced conditions [16]. But if participants are forced to respond very rapidly, habitual errors can be elicited in a majority of trials [18]. Similar low-latency expression of habits occurs when using hand movements to control an on-screen cursor. If the mapping between hand and cursor is distorted, e.g. through a mirror-reversal of the position of the cursor on the screen, participants can quickly learn to generate accurate movements when allowed to take their time before moving. However, rapid corrective responses to a perturbation applied during the movement betray a persistent habitual tendency to generate baseline patterns of correction, even after extensive practice [22–24]. Thus, habits are most strikingly revealed when actions must be generated very rapidly.
In summary, practice leads to three distinct changes in behavior: First, it improves skill level, in including the ability to select actions more rapidly. Second, it permits appropriate actions to be selected with less cognitive effort than before. Third, it leads action selection to become habitual.
Cached computation as a theory of automatic action selection
These three effects of practice, skill, habit and reduced cognitive load, are often viewed as alternative ways of observing a single underlying change in behavior: that it has become automatic [25–27]. It has often been assumed that it is sufficient to study any one of these phenomena on its own as a proxy for assessing the assumed underlying property of “automaticity”. However, this assumption has remained largely untested; skill, habit and cognitive load have rarely been measured together in the same experiment. Aside from the fact that they are all altered through practice, why would one expect them to relate to one another?
In order to answer this question, it is worthwhile to first consider how an action is selected in the first place. It has been argued that motor control, much like any other task we might engage in, can be framed as a decision problem [2]. In order to select appropriate actions, we need to weigh up the relative costs and benefits of each option in order to determine which is best. This process, however, is generally computationally intensive.
In practice, we often tend to encounter the same decisions over and over again. If so, repeating the same computations and obtaining the same outcomes each time is needlessly timeconsuming. Instead, it should be possible to simply remember which action you ended up selecting last time you encountered the same choice. This trick of storing the outcome of frequently occuring computations for rapid use later is often referred to as caching, by analogy with a computer cache - a memory reserve that is dedicated for high-speed retrieval.
Dispensing with time-consuming computations by using a cached representation ought to allow actions to be selected much faster, i.e. improving skill. Furthermore, simply looking up the solution in a cache frees up the resources that would have been required to compute the solution, reducing the cognitive load associated with performing the task. Alongside these advantages, however, behavior will be liable to become inflexible; if the task changes in a way that warrants a different action being selected, information in the cache will remain outdated, leading to persistence of old patterns of behavior. Behavior therefore, will become habitual [14,21].
It’s worth noting that even the process of recalling an association from past experience can in general be an iterative, time-consuming process (try naming all the countries in Europe to see that this is true). Caching, therefore, should be understood as more than merely a process of retrieving prior outcomes, but as a means of storing direct associations between inputs and output in a way that is amenable to instant lookup. Indeed, the process of retrieval itself can be improved through practice [28], and many theories have argued that one-step retrieval should be considered a hallmark of automatic behavior [29]. Thus memory retrieval itself can be considered to be a form of cachable computation.
The principle of caching therefore provides a potentially unifying and appealingly parsimonious theory of practice and automaticity: it accounts for improved speed of responding, reductions in cognitive load, and the tendency for behavior to become habitual. Considered in this way, the primary function of practice therefore might be to gather sufficient experience to establish this pre-computed cache. If so, changes in all three of these aspects should be closely correlated with one another (Figure 1b).
Figure 1.
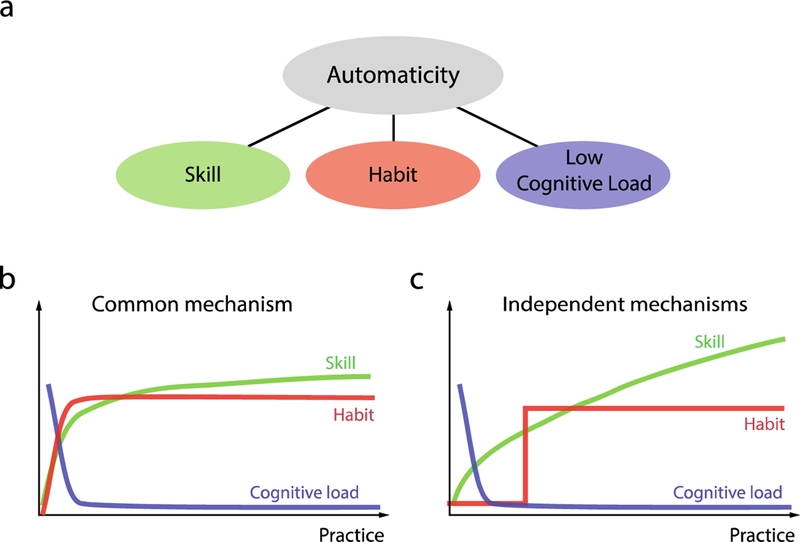
Automaticity as a “syndrome” of skill, habit and cognitive load. a) Automaticity of well-practiced behaviors is typically characterized by a cluster of features: skill (faster performance), habit (behavior is expressed even if no longer appropriate) and low cognitive load (behavior can be produced with little attention or effort) b). If these features are supported by a common underlying mechanism, they should exhibit a comparable time course. c) Alternatively, if these facets of behavior are supported by independent mechanisms, they may follow dissociable time courses.
Hierarchical representations and intermediate computations
In principle, one can reduce any learned behavior, such as braking at a red light or hitting a tennis ball, to a single cached association between a stimulus and a response (Figure 2a), which will naturally give rise to all three facets of the automaticity “syndrome”. More generally, however, the process of determining an appropriate action may involve a more hierarchical process that entails multiple computational steps. In the case of braking at a red light, seeing the light may prompt us to engage in the goal of stopping the car. We then select an appropriate action to satisfy this goal. Both steps of this process might require time-consuming computations at first. With practice, however, either or both of these computational steps could, in principle, be cached. Caching different steps will lead to different behavioral consequences.
Figure 2.
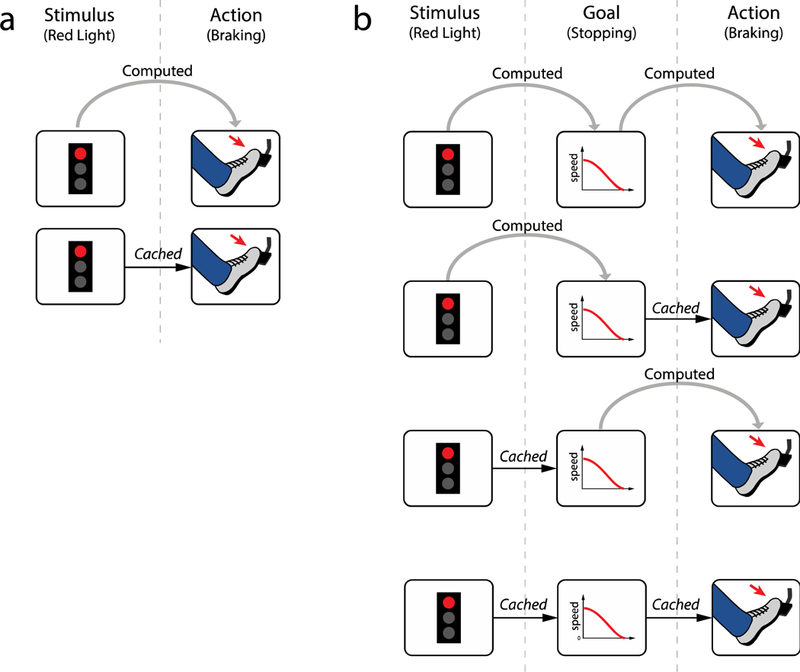
Caching in the context of hierarchical selection problems. a) In a simple stimulus- response scenario, only one computation is available to be cached. Consequently, skill, habit and cognitive load are likely to co-vary. b) In a more complex scenario, action selection involves two distinct computations: i) behavioral goals must be determined from stimuli and ii) actions must be selected to achieve these goals. Either of these computations could be cached, giving rise to a more diverse set of potential configurations. Habits and cognitive load associated with these different configurations may differ.
If you were to cache the association between the red light and the goal of stopping the car, you would habitually stop at red lights even if the rules of traffic lights were to change so that green now meant stop. But driving a car in which the brake and accelarator pedals were switched would pose no problem. Conversely, caching the association between stopping the car and braking would make you flexible to different traffic light rules, but unable to cope with a switch in pedals.
The idea that decisions in more complex tasks can be decomposed into selection of a goal, and selecting of actions to pursue the goal is supported by Cushman and Morris [30]. In an abstract navigation task, they showed that human participants can be prone to habitual selection of high- level goals (where to go), but engage in flexible goal-directed decisions to attain those goals (how to get there). Another example of a more nuanced kind habit was shown by Momennejad et al. [31]. They found that human participants were more vulnerable to habitual errors following a change in the consequences of their actions than following a change in the amount of reward associated with those consequences. This pattern of errors is consistent with using a cached prediction about the future consequences of current actions - an intermediate step in computing future expected reward and, therefore, which action to select.
The possibility of caching multiple component computations also has implications for cognitive load. Different component computations might depend on distinct cognitive resources (e.g. verbal working memory versus spatial working memory) or to differing degrees. Caching some computations might therefore have a big impact on cognitive load, but not on habitual choice, or vice versa. Economides et al. [32] showed some evidence for this perspective. They tested whether goal-directed choice behavior imposed a cognitive load. Initially, performing a concurrent dual task led to an increase in habitual responding. With practice, however, participants became able to select appropriate, goal-directed actions while also accurately performing the dual task. These improvements in dual-task performance were likely attributable to caching auxiliary computations, such as parsing the stimuli and remembering basic task instructions, rather than caching the key computations that supported goal-directed action selection.
Conclusions
The principle of caching provides a compelling and parsimonious theory of automaticity following practice. Caching of a simple stimulus-response relationship accounts for the typically observed behavioral effects of practice: faster responding (skill), habitual behavior, and reduced cognitive load. The idea of caching computations can be applied more generally, however, giving rise to a multitude of different behavioral consequences.
This richer and more nuanced view of automaticity view raises the possibility that practice may indeed have multiple, dissociable effects, associated with caching different intermediate computations. If so, this may help to explain why attempts to identify the neural basis of automaticity have yielded such disparate conclusions [10,12,33,34], including that automaticity reflects recruitment of circuits in the cerebellum [10,35] or cortex [33], a shift in representation across subregions of the striatum [15,36], or a shift to cortical computations becoming independent of the basal ganglia altogether [37].
Ultimately, these considerations highlight the need for a richer understanding of the computations underlying action selection, which we suggest is most likely to be achieved through careful measurement and analysis of behavior.
Box 1: Parallels with other learning dichotomies.
The computed-versus-cached perspective is related to several other dichotomies that have been proposed in the context of learning [19] (Table 1). One such distinction is that between declarative and procedural forms of memory. Since the time of H.M., the idea of declarative knowledge has come to be associated with dependence on the hippocampus and the medial temporal lobe [38]. In certain areas, the terms declarative and procedural have come to be associated with different types of learning that are either explicit or implicit [36]. However, the terms declarative and procedural originally derive from computer science, and theories of knowledge representation [39]. Declaratively represented knowledge is expressed in the form of facts about the world, which can be used to logically deduce answers to questions. Procedural knowledge, on the other hand, is expressed in terms of solutions to potential queries. Thus, a cached movement policy can be considered a form of procedural knowledge.
Another common dichotomy in theories of learning is the distinction between model-based and model-free reinforcement learning [19,21]. In Model-based reinforcement learning, individual agents maintain a rich model of the world, including the effects of their actions and availability of rewards, and use this model to compute the value (expected future reward) of each available state and/or action at a given point in time. In model-free reinforcement learning, by contrast, no such model is maintained. Instead, only the values of states and/or actions are stored in a cached form. The key additional distinction of model-free reinforcement learning, however, is that it is associated with a means of updating these cached values directly, based on experienced versus anticipated reward [40].
Table 1.
Common dual-process dichotomies in learning. Green boxes: processes or characteristics that dominate early in learning. Purple boxes: processes that dominate late in learning. Grey boxes describe the defining feature of late learning in contrast to early learning.
| Defining Feature | Typically Dominates Early | Typically Dominates Late |
|---|---|---|
| Response Speed | Slow | Fast |
| Flexibility | Goal-Directed | Habitual |
| Cognitive Load | Effortful | Efficient |
| Deducing or Retrieving | Computed | Cached |
| Representation of Knowledge | Declarative | Procedural |
| Representation of Value | Model-Based | Model-Free |
Practice leads to improved skill, habitual behavior and reduced cognitive load
Collectively, these phenomena are commonly referred to as “automaticity”
Automaticity may be a consequence of caching the outcome of frequent computations
More complex tasks can involve intermediate computations which may be cached
This can lead to dissociations between skill, habit and cognitive load
Footnotes
Publisher's Disclaimer: This is a PDF file of an unedited manuscript that has been accepted for publication. As a service to our customers we are providing this early version of the manuscript. The manuscript will undergo copyediting, typesetting, and review of the resulting proof before it is published in its final citable form. Please note that during the production process errors may be discovered which could affect the content, and all legal disclaimers that apply to the journal pertain.
References
- 1.Diedrichsen J, Komysheva K: Motor skill learning between selection and execution. Trends Cogn Sci 2015, 19:227–233. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 2.Wolpert DM, Landy MS: Motor control is decision-making. Curr Opin Neurobiol 2012, 22:996–1003. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 3.Muller H, Sternad D: Decomposition of variability in the execution of goal-oriented tasks: three components of skill improvement. J Exp Psychol Hum Percept Perform 2004, 30:212–233. [DOI] [PubMed] [Google Scholar]
- 4.Reis J, Schambra HM, Cohen LG, Buch ER, Fritsch B, Zarahn E, Celnik PA, Krakauer JW: Noninvasive cortical stimulation enhances motor skill acquisition over multiple days through an effect on consolidation. Proc Natl Acad Sci,2009. 106:1590–1595. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 5.Shmuelof L, Krakauer JW, Mazzoni P: How is a motor skill learned? Change and invariance at the levels of task success and trajectory control. J Neurophysiol 2012, 108:578–594. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 6.Anderson JR: Acquisition of cognitive skill. Psychol Rev 1982, 89:369–406. [Google Scholar]
- 7.Fitts P: Perceptual-Motor Skill Learning In Categories of Human Learning. Academic Press; 1964. [Google Scholar]
- 8.Taylor JA, Ivry RB: The role of strategies in motor learning. Ann N Y Acad Sci 2012, 1251:1–12. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 9.Pashler H: Dual-task Interference in Simple Tasks: Data and Theory. Psychol Bull 1994, 116:220–244. [DOI] [PubMed] [Google Scholar]
- 10.Balsters JH, Ramnani N: Cerebellar Plasticity and the Automation of First-Order Rules. J Neurosci 2011, 31:2305–2312. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 11.Shiffrin RM, Schneider W: Controlled and automatic human information processing: II. Perceptual learning, automatic attending and a general theory. Psychol Rev 1977, 84:127–190. [Google Scholar]
- 12.Wu T, Kansaku K, Hallett M: How Self-Initiated Memorized Movements Become Automatic: A Functional MRI Study. J Neurophysiol 2004, 91:1690–1698. [DOI] [PubMed] [Google Scholar]
- 13.Dickinson A: Actions and habits: the development of behavioural autonomy. Phil Trans R Soc Lond B 1985, 308:67–78. [Google Scholar]
- 14.Dolan RJ, Dayan P: Goals and Habits in the Brain. Neuron 2013, 80:312–325. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 15.Yin HH, Knowlton BJ: The role of the basal ganglia in habit formation. Nat Rev Neurosci 2006, 7:464–476. [DOI] [PubMed] [Google Scholar]
- 16.Helie S, Waldschmidt JG, Ashby FG: Automaticity in rule-based and information-integration categorization. Atten Percept Psychophys 2010, 72:1013–1031. [DOI] [PubMed] [Google Scholar]
- 17.Ashby FG, Ell SW, Waldron EM: Procedural learning in perceptual categorization. Mem Cognit 2003,31:1114–1125. [DOI] [PubMed] [Google Scholar]
- 18.Hardwick RM, Forrence AD, Krakauer JW, Haith AM: Skill Acquisition and Habit Formation as Distinct Effects of Practice. bioRxiv 2017, doi: 10.1101/201095.** The authors propose a model of evolving competition between habitual and goal-directed action selection during the reaction time, and track how this is affected by practice.
- 19.Dayan P: Goal-directed control and its antipodes. Neural Netw 2009, 22:213–219. [DOI] [PubMed] [Google Scholar]
- 20.Glascher J, Daw N, Dayan P, O’Doherty JP: States versus Rewards: Dissociable Neural Prediction Error Signals Underlying Model-Based and Model-Free Reinforcement Learning. Neuron 2010, 66:585–595. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 21.Daw ND, Niv Y, Dayan P: Uncertainty-based competition between prefrontal and dorsolateral striatal systems for behavioral control. Nat Neurosci 2005, 8:1704–1711. [DOI] [PubMed] [Google Scholar]
- 22.Telgen S, Parvin D, Diedrichsen J: Mirror Reversal and Visual Rotation Are Learned and Consolidated via Separate Mechanisms: Recalibrating or Learning De Novo? J Neurosci 2014, 34:13768–13779. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 23.Kasuga S, Telgen S, Ushiba J, Nozaki D, Diedrichsen J: Learning feedback and feedforward control in a mirror-reversed visual environment. J Neurophysiol 2015, 114:2187–2193. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 24.Gritsenko V, Kalaska JF: Rapid Online Correction Is Selectively Suppressed During Movement With a Visuomotor Transformation. J Neurophysiol 2010, 104:3084–3104. [DOI] [PubMed] [Google Scholar]
- 25.Cohen JD, Servan-Schreiber D, McClelland JL: A Parallel Distributed Processing Approach to Automaticity. Am J Psychol 1992, 105:239–269. [PubMed] [Google Scholar]
- 26.Helie S, Cousineau D: The Cognitive Neuroscience of Automaticity: Behavioral and Brain Signatures. Cogn Sci Hauppauge 2011, 6:35–53. [Google Scholar]
- 27.Moors A, De Hower J: Automaticity: A Theoretical and Conceptual Analysis. Pschological Bull 2006, 132:297–326. [DOI] [PubMed] [Google Scholar]
- 28.Karpicke JD, Roediger HL: The Critical Importance of Retrieval for Learning. Science 2008, 319:966–968. [DOI] [PubMed] [Google Scholar]
- 29.Logan GD: Skill and automaticity: Relations, implications, and future directions. Can J Psychol Can Psychol 1985, 39:367–386. [Google Scholar]
- 30.Cushman F, Morris A: Habitual control of goal selection in humans. Proc Natl Acad Sci 2015, 112:13817–13822.* The authors demonstrate the existence of a hierarchical task representation with habitual selection of goals, but deliberate and flexible pursuit of this goal.
- 31.Momennejad I, Russek EM, Cheong JH, Botvinick MM, Daw ND, Gershman SJ: The successor representation in human reinforcement learning. Nat Hum Behav 2017, 1:680.** The authors show that human behavior in a reinforcement learning task is more flexible to changes in reward structure, than changes in state transitions. This behavior is consistent with caching predictions about future state occupancy.
- 32.Economides M, Kurth-Nelson Z, Lubbert A, Guitart-Masip M, Dolan RJ: Model-Based Reasoning in Humans Becomes Automatic with Training. PLOS Comput Biol 2015, 11:e1004463.* The authors demonstrate that an additional cognitive load initially renders behavior more habitual in a sequential decision task, but that this effect is eliminated following practice.
- 33.Grol MJ, Lange FP de, Verstraten FAJ, Passingham RE, Toni I Cerebral Changes during Performance of Overlearned Arbitrary Visuomotor Associations. J Neurosci 2006, 26:117–125. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 34.Poldrack RA, Sabb FW, Foerde K, Tom SM, Asarnow RF, Bookheimer SY, Knowlton BJ: The Neural Correlates of Motor Skill Automaticity. J Neurosci 2005, 25:5356–5364. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 35.Ramnani N: Automatic and controlled processing in the corticocerebellar system. Prog Brain Res 2014, 210:255–285. [DOI] [PubMed] [Google Scholar]
- 36.Ashby FG, Maddox WT: Human category learning 2.0. Ann N Y Acad Sci 2011, 1224:147–161. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 37.Helie S, Roeder JL, Ashby FG: Evidence for Cortical Automaticity in Rule-Based Categorization. J Neurosci 2010, 30:14225–14234. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 38.Squire LR, Zola SM: Structure and function of declarative and nondeclarative memory systems. Proc Natl Acad Sci 1996, 93:13515–13522. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 39.Winograd T: Frame representations and the declarative/procedural controversy. In Representation and understanding: Studies in cognitive science. 1975:185–210. [Google Scholar]
- 40.Sutton R, Barto A: Reinforcement Learning: An Introduction. MIT Press; 1998. [Google Scholar]