

SUMMARY
Recently, the potential to create functional materials from various forms of organic matter has received increased interest due to its potential to address environmental concerns. However, the process of creating novel materials from biomass requires extensive experimentation. A promising means of predicting the properties of such materials would be the use of machine-learning models trained on or integrated into self-learned experimental data and methods. We outline an automated system for the discovery and characterization of novel, sustainable, and functional materials from input biomass. Artificial intelligence provides the capacity to examine experimental data, draw connections between composite composition and behavior, and design future experiments to expand the system’s understanding of the studied materials. Extensions to the system are described that could further accelerate the discovery of sustainable composites, including the use of interpretable machine-learning methods to expand the insights gleaned from to human-readable materiomic insights about material process-structure-functional relationships.
INTRODUCTION
There is an urgent and growing need for the discovery of sustainable alternatives to many functional materials. The negative environmental impacts of solid-waste accumulation from disposed products with poor degradation mechanics,14 greenhouse gas emissions,42 and the loss of natural habitats due to the extraction of non-renewable resources26 have become increasingly clear. Among the potential solutions to such issues, a popular proposal is the development of functional composites from abundant, renewable, organic resources.19,23,44
One class of such materials are composites of biotic material, or ‘‘biocomposites,’’ which hold several key advantages over conventional alternatives such as petroleum-based materials. Firstly, the biomass used to create them can be derived from rapidly renewable stocks such as bamboo1 or agricultural biproducts or even organic waste streams.13 Additionally, so long as they are not too extensively processed, they can be assumed to biodegrade at least as safely as their organic constituents.34 Much like materials in nature, they also demonstrate remarkable versatility with a wide range of behaviors emerging from relatively small changes in composition or chemistry,3,33 and using natural materials further offers a pathway to include living organisms in the manufacturing process. Moreover, we propose that special attention must be given to the use of material sources that do not compete with food supply or even use food waste as input.
Several promising biocomposites with high potential for engineering applications have been developed to date. Notable among these for its superior mechanical properties, machinability, and lack of synthetic binding agents is the cellulosic composite fungal-like adhesive material (FLAM), which has a Young’s modulus of 0.26 GPa and a density of 0.37 g/cm3.39 Related research demonstrates that the mechanical properties of similar composites can be tuned through variations in the ratios of constituent materials.33 However, the process of discovering and characterizing such materials currently relies upon wrought experimentation, which can be laborious and time consuming. Considering the vastness of the solution space, there is great potential for an automated system of material exploration and characterization to discover novel compositions for sustainable functional composites, especially for scenarios requiring optimization of multiple (often competing) objectives.
Digital fabrication and robotic technology are just beginning to make this notion of automated material discovery, which we believe is particularly critical for complex biomass-based material platforms, a possibility.22 The biocomposites described above are suitable for additive manufacturing,33,39 which in turn allows for the direct creation of standardized geometries for mechanical testing and characterization and enables access to a broader range of geometries than casting or injection molding. In combination with flexible robotic systems, such fabrication methods could feasibly allow for automated data gathering and analysis regarding mechanical and other properties.
Furthermore, the proliferation of broadly accessible artificial intelligence (AI) systems that can model and identify relationships between a composite’s components and its resultant behaviors could make use of these data to effectively identify composites with the greatest potential and to navigate the solution space in an intelligent manner.18 An area of particular interest is the use of attention-based deep-learning models that implement a building-block-based modeling platform as proposed in recent work on neural categorization of material ologs.4 The goals of these systems can be tuned according to the aims of the researchers, ranging from the optimization of specific composite properties to the discovery of novel materials. Such systems generally require large sets of experimental data to build training sets for their effective use. As these data would require substantial time to gather by hand, we describe several methods of automation within the proposed platform to accelerate experimentation. Further, we envision that the use of interpretable machine-learning tools can further enrich human understanding of materiomic relationships between building blocks, processes, and the set of predicted properties.
Here, we outline a framework for the automated discovery and characterization of novel biocomposites with a specific focus on sustainable structural materials. We describe the process of state-of-the-art biocomposite characterization and highlight the requirements of an automated system. We further describe expansions to this system that could extend its utility, moving toward a fully automated system with limited need for human intervention. Such a system could dramatically accelerate the discovery of new sustainable materials in a time when they are urgently needed.
BACKGROUND: CHALLENGES AND OPPORTUNITIES IN BIOCOMPOSITE MATERIALS DISCOVERY
Current methods for developing novel biocomposites can be laborious, and the discovery of even a single functional material is often challenging. Figure 1 displays a state-of-the-art workflow for biocomposite manufacturing and several objects fabricated using biomass such as delignated cellulose, lignocellulose, and chitosan. Below, each step of this workflow and its associated challenges are described.
Figure 1. A state-of-the-art workflow for the fabrication and characterization of structural biocomposites.
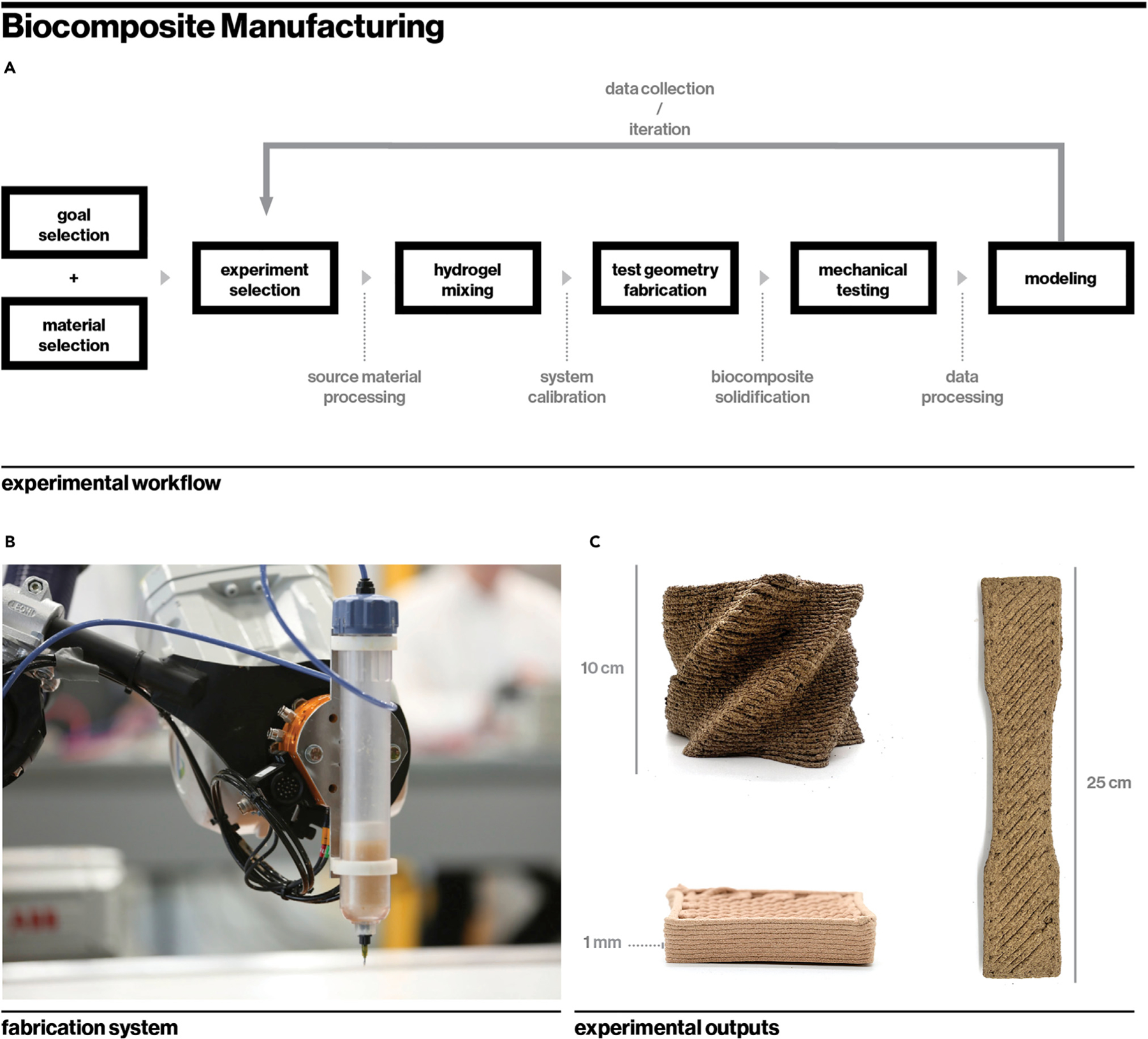
(A) A workflow proceeds from left to right beginning with the selection of experimental goals and source materials. After each round of biocomposite fabrication and characterization, data are gathered and used to iterate upon the next selection of experiments.
(B) A pneumatic extruder affixed to a 6-axis robotic arm extrudes hydrated biocomposites.
(C) Extruded biocomposites solidify through evaporation. Composites containing delignated cellulose, lignocellulose, and chitosan are pictured.
Source material identification and experiment goals
At the outset of experimentation, the set of stock materials of interest must be identified and made available to the experimentation system. These stocks may be selected due to their environmental implications, such as high levels of renewability or superior biodegradability, or due to demonstrated mechanical properties such as the known toughness of silk fibroin.12 Additional considerations include the cost of component materials and their required storage conditions. Experimental goals may be directed such as the optimization of specific material properties, exploratory search for novel functional materials, or understanding of specific phenomena such as fracture mechanics.29
Hydrogel mixing
When working with water-soluble materials, one method of fabrication is to incorporate constituent materials into hydrogels, which can then be formed into geometries through three-dimensional (3D) printing. Mixing and/or homogenizing may be accomplished through the use of devices such as orbital mixers, bladed blenders, or industrial mixers depending on particle size, hydrogel viscosity, and material volume. The relative ratios of each component in the hydrogel are determined according to the experimental design and ultimately determine composite properties.
Fabrication of standard geometries
The semi-solid hydrogel materials can then be loaded into cartridges, de-aired, and placed in a 3D printing system that utilizes pneumatic extrusion. A range of fabrication parameters, including extrusion pressure and feed rate, are determined for optimal and consistent extrusion of each new material. The printing process may also require other calibration steps associated with general 3D printing, such as leveling and cleaning the build area. After printing of 3D geometries, the experimenter must monitor the printed samples and determine when they have fully solidified via evaporation to allow for mechanical testing.
Mechanical testing
The printed geometries can be loaded into standard machines for tensile, compression, or three-point bending tests in order to determine properties such as ultimate tensile or compressive strength and effective modulus. While 3D-printed samples are non-homogeneous and therefore unsuited for the determination of true mechanical properties, the results of these tests can demonstrate relative relationships between a composite’s components and its mechanical properties, which can in turn inform models and future experiments.
Modeling
Data gathered from mechanical testing can be used to elucidate relationships between constituent materials and the composite’s mechanical properties. In some cases, these relationships may be non-linear and therefore require substantial experimentation before a relationship can be accurately modeled. Currently, the scarcity of existing models for the accurate prediction of biocomposite properties generally leads to a characterization of one or several functional composites rather than rigorous characterization of the impact of component materials on mechanical properties.
Recently, there has been a proliferation of machine-learning (ML) models created to interpret structure-function relationships across fields. These include the use of graph neural networks (GNNs) to predict the natural frequency of protein structures24 and the use of deep-learning systems to model the mechanical strength of protein structures.30 Similar methods have shown promise in predicting mechanical failure in simulated composites29 and the prediction of stiffness and yield strength in fibrous composites through the use of supervised ML.37 If adequate data could be gathered for the construction of suitable training sets, such methods may be well suited for the prediction of biocomposite mechanical properties and fracture mechanics.
Data collection and iteration
Because of the vast design space even with few select components, it is unlikely for manual experimentation and modeling to lead to the discovery of a truly optimal composite. More likely, the researchers will identify one or several suitable composites that are not necessarily a global optimum. Even this limited exploration requires substantial repetition of the above steps. As data are collected from each successful round of experimentation, the gathered data can be added to a growing database. Trends relating composite composition and material properties can be gathered using simple statistical models such as linear regression or support singular value decomposition (SVD), but relatively simple methods require a relatively large number of repeated experiments to draw conclusions and ensure consistency.
Maintenance
Not described within these steps are a multitude of subtasks required to maintain the utilized systems including cleaning, maintenance, and sterilization. During the printing process, the machine may need to be stopped in the case of the print nozzle being jammed or incorrect parameters leading to defects in the output geometry. These issues are generally addressed by researchers who learn the appropriate maintenance response through experience, and a substantial amount of time may be spent dealing with such issues.
Outlook
Certainly, the automation of this process is a substantial challenge, and certain aspects of this pipeline may be more readily automated than others. However, a fully automated system would be equipped to explore and discover novel materials at a rate that far surpasses wrought experimentation and therefore would be more capable of discovering composites with novel properties.
A further advantage of automating this process is the minimization of human error. Particularly in the mixing of hydrogels, small variations in the proportion of component materials are inevitable and can lead to inconsistent results or incorrect conclusions. An automated system with a higher level of precision may be able to minimize such errors and more quickly identify the true properties of studied composites with little repetition.
The manual workflow may be suitable for the identification of one or several functional composites that can be made with the selected material stock, but the exploration of a broad range of materials and the identification of composites with specific properties remains inaccessible without the automation of key processes.
AUTOMATING BIOCOMPOSITE DISCOVERY
The state-of-the art system described above, while adequate for the discovery of one or several materials over a long period of time, could be expanded with existing automation systems. Such an expansion would dramatically accelerate the rate of experimentation and allow for the construction of datasets with the appropriate size to train more complex ML models to identify relationships between composite composition and behavior. Below, we outline changes that can be made to the described system in order to automate key processes and accelerate the process of materials discovery for use in an AI framework that will direct, assess, and manufacture biobased materials with optimized structural properties. These advancements are listed in order of estimated attainability with the most readily implemented proposals listed first.
Automated fabrication and characterization
Given that the described pipeline already implements a digital fabrication workflow through the use of additive manufacturing, a logical first step toward full automation is the coupling of this system with a robotic system for mechanical characterization of printed composites. Within this system, researchers would still mix hydrogel solutions and load them into the extruder, but the subsequent steps of manufacturing geometries for testing and gathering data on mechanical properties would be conducted automatically.
Figure 7 illustrates this process and the relationship between an automated physical research system and a digital design system. Researchers load the additive manufacturing system with hydrogel solutions and record their compositions within the digital design space. The manufacturing system then would extrude the appropriate test geometries for tensile, compression, and three-point bending tests. Using visual information and experimental data, the digital system would determine when the composites have solidified and remove them from the print area, placing them into the appropriate mechanical tests. The digital system would then record the relevant information from each experiment within a database, where it can explore relationships between composite compositions and mechanical properties.
Figure 7. A partially automated system for the discovery of functional composites made from sustainable stocks.
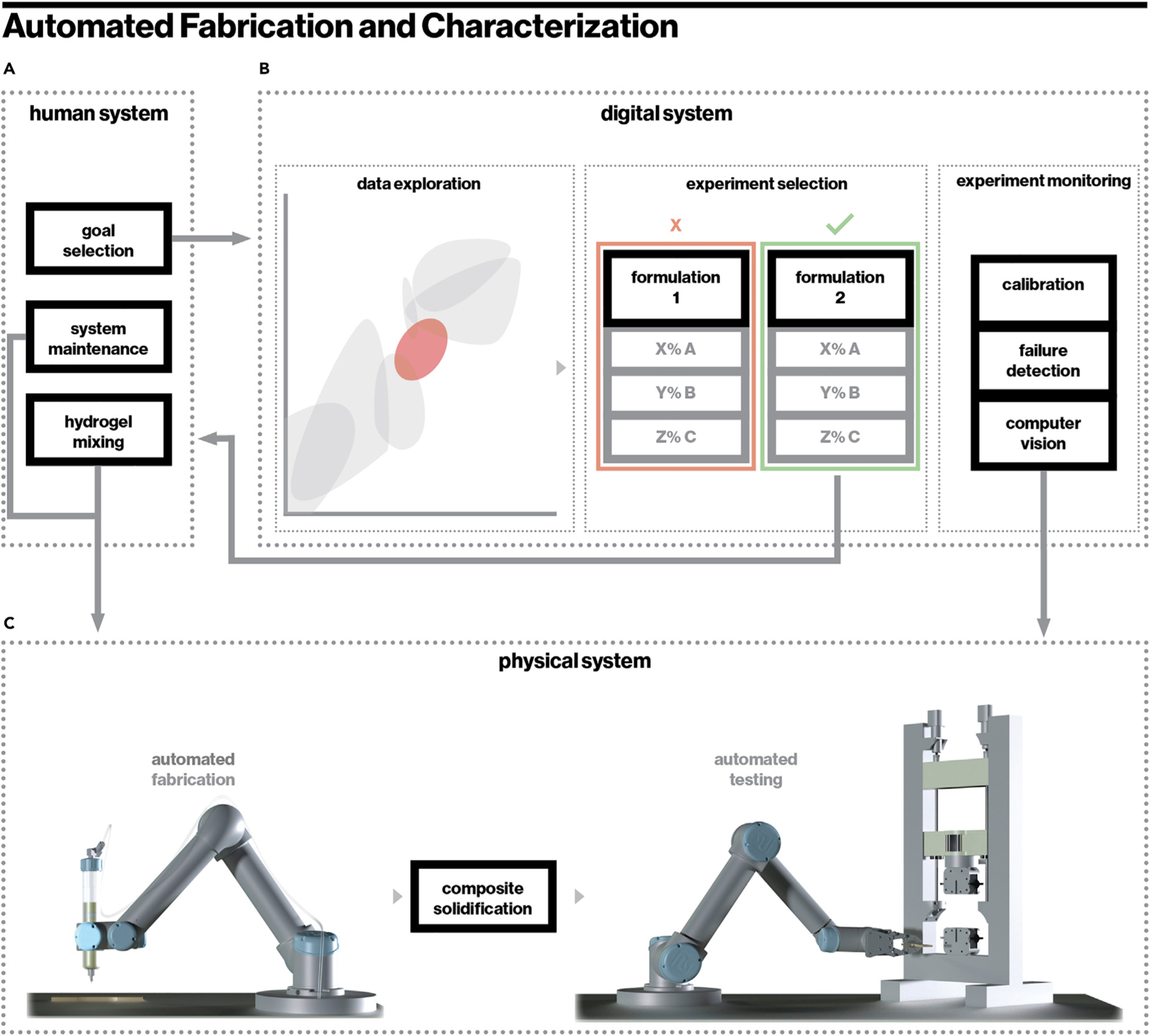
(A) Researchers define the goals of experimentation and interact with the physical system through hydrogel mixing and routine maintenance.
(B) The digital system conducts exploration of gathered data in order to determine potential relationships between composite composition and properties and to select experiments that will further its knowledge of such relationships. The selected experiments inform what hydrogels are mixed in the human system. The digital system interacts with the physical system to monitor experiments, calibrate the printing system, and detect failures.
(C) The physical system works to fabricate test geometries and conduct mechanical tests, which then feed data back to the digital system.
From these data, the next set of experiments would be determined by the digital system, and the process would repeat, with the researchers mixing the next array of hydrogels designated by the digital system. The key aim of this is the identification of relationships between composite composition and mechanical properties. ML methods have proven effective in identifying such relationships in similar fields such as combinatorial polymer chemistry16 and the design of soft materials.21 If specific mechanical properties are desired, a Bayesian optimization approach can be incorporated to allow for expedited optimization of material properties over several iterations with less initial data than comparable models.28 ML methods have proven useful in optimal experimental design in similar fields,45 which could allow the system to examine what experiments would provide the most valuable expansion to its own understanding, effectively allowing the machine to guide its own learning process. Once sufficient data are collected, models such as artificial neural networks (ANNs) can be trained as surrogate models to predict properties of novel composite formulations.32 For general property exploration, with the accelerated pace of experimentation, a larger training set can be constructed that would allow the AI system to discover relationships between composite formulation and behavior.
Within this workflow, human researchers would still work to maintain the manufacturing system and clean out excess material after testing in order to mitigate contamination or extruder jamming. Additionally, the digital system would need to be pre-trained with a set of experimental data to accelerate the identification of relationships in the gathered data.
While existent additive manufacturing processes often proceed in largely automated fashion, the system would require a mechanism by which to detect flawed extrusions, calibrate the printer, and adjust printing parameters according to the material composition. Systems that utilize computer vision38 and ML15 for these purposes have been previously described and could be integrated into the proposed workflow with the addition of imaging and depth-sensing capabilities. Such systems could also be used to visually examine the printed materials and determine when they have solidified enough to undergo mechanical testing.
The subsequent step of mechanical testing has similarly been successfully automated both in research and commercial environments. Commercially available systems for automated mechanical testing such as those sold by Instron (Norwood, MA, USA) couple a 6-axis robotic arm with standard testing equipment in order to automate the process of placing test geometries within the system and testing them to failure ([CSL STYLE ERROR: reference with no printed form.]). These systems are designed to work with a researcher loading the appropriate tests into a holding area that the robot then selects from—a process that, in itself, would be well suited for automation by a robotic arm in the described system.
In Figure 7, a single 6-axis robotic arm is used for both the manufacturing and manipulation of geometry through the use of changeable end effectors capable of 3D printing and grasping, respectively. The flexibility provided by a robotic arm simplifies the described system to require only one maneuverable component while the rest of the system can remain fixed in place.
This first step toward automation could be readily constructed with commercially available components and already could dramatically accelerate the process of sustainable material discovery. Further acceleration could be achieved through the automation of the hydrogel mixing process.
Automated mixing and maintenance
The above system could be further extended to automate the processes of mixing hydrogel stocks for printing and the general maintenance of the physical manufacturing components. Here, researchers would designate the material stocks to be explored and load their base components into a robotic system capable of measuring, mixing, and loading hydrogel solutions. The following steps of manufacturing and mechanical testing would proceed as described above. Figure 8 outlines this extended workflow.
Figure 8. The previously described system is extended to automate the mixing of hydrogel solutions, creating a closed loop between the digital and physical system.
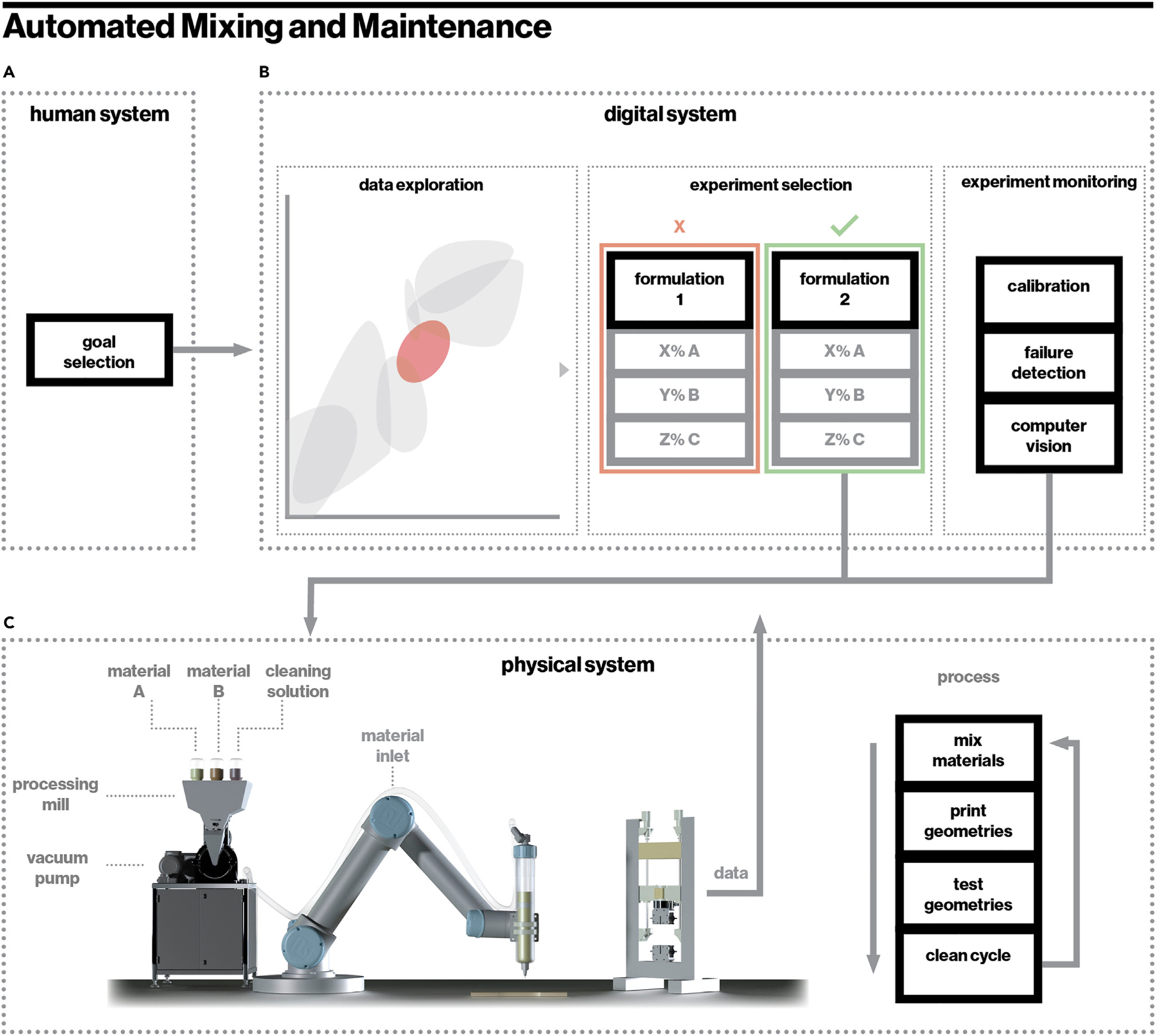
(A and B) Human researchers work to define the goals of the system and feed this information to the digital system (A), which then (B) draws insights from gathered experimental data and selects future experiments.
(C) The digital system controls the mixing of hydrogel solutions through an automated mill in the physical system, which feeds mixed materials to the additive manufacturing mechanism. The physical system runs through a routine of mixing materials, printing geometries, testing geometries, and self-cleaning between successive experiments and feeds physical data back to the digital system.
Automating the mixture of hydrogels and loading of printer cartridges is particularly challenging. The hydrated biopolymer mixtures have the consistency of a thick paste or a wet ceramic, which means that they require both thorough mixing and frequent cleaning. One means by which to automate this process could be the implementation of a mill similar to pug mills, which homogenize and de-air ceramics to extrude into cylindrical forms.41 If modified to function on materials of lower viscosity than conventional ceramics, such a mill may be able to simplify the existing mixing process to a point where it could be automated. Automation would allow the system to weigh out and deposit precise quantities of material into the mill and mix them for set periods of time. The resultant paste could be extruded directly into cartridges, which could then be loaded into the 3D printing system. After each mixing cycle, the system would need to be flushed with a cleaning fluid in order to remove excess material and prevent buildup that could lead to jamming or contamination.
A similar cleaning step could be added to the extrusion system in order to remove the need for researchers cleaning the system manually. Additional cartridges could be loaded with cleaning solution, and a waste-collection zone could be added to the fabrication area. This waste collection area would serve the additional purpose of collecting waste material from mechanical tests or failed prints. To facilitate this, a computer-vision system would be required to search the fabrication area, identify failed prints or broken test geometries, and relocate them to the waste collection area.
Leaving the preparation of reagents under the control of the experimenters rather than the automated system provides the advantage of ensuring reagent compatibility. Until this point, the system under consideration has worked largely with hydrophilic reagents that can be easily combined in hydrogels. However, the broad category of hydrophobic organic materials including organic waxes,11 oils, and silks36 may not readily incorporate into such hydrogels but could impart properties such as improved water resistance. One advantage of this partially automated system is that researchers can intentionally select a pallet of reagents and solvents from which they have already verified as compatible with one another.
While the described extension to the system would be challenging to implement, it could provide meaningful acceleration to the process of materials discovery by allowing the system to continually run tests without human intervention. Supposing that the system was loaded with adequate stocks of base material components, it could continue gathering data, identifying novel material combinations, and testing them, in essence running fully automated Bayesian optimization experiments, until it either experienced a mechanical failure or ran out of stock materials. This further accelerated pace of experimentation could enable more rapid learning within the AI system, allowing it to more quickly develop insights into the relationship between composite composition and properties.
This extension to the system would essentially provide a closed loop between the physical and digital environments that could explore, characterize, and discover sustainable functional materials with unprecedented autonomy.
Automated materials processing and environmental impact assessment
Until this point, the described system has utilized inputs of refined biotic materials in order to create functional composites. Even in manual experiments, the consistency of input materials is critical to the identification of useful materials. Delignated cellulose with a fiber length of 100 μm will lend different properties to a composite than a similar material with a fiber length of 500 μm.17 However, the range of functionalities that can be discovered by an automated system is constrained by prior selection of materials. If the system were augmented with the capacity to refine and process organic matter on its own, it could then conduct a true open-ended exploration of sustainable composites using unrefined, abundant stocks of renewable materials.
The task of refining organic materials into the stocks currently used in the existing system is extensive, often requiring the use of multiple dedicated facilities.40 The same level of processing within a small-scale automated system is likely unfeasible. However, it may be possible to refine useful reagents from one or two organic sources in a simplified manner that still allows for a broad solution space. For example, a stock of fallen leaves could be refined into useful components such as wood fiber simply through mechanical grinding or delignated cellulose of various fiber sizes and lignin through chemical valorization. Similarly, the small-scale de-acetylation of fungal chitin could be used to produce chitosan for the system. These steps would require mechanical and chemical processing equipment such as burr grinders, enzymatic solutions, and chemical baths. Beyond this, it would be advantageous for the system to be able to quantify parameters including particle size, pH, and viscosity of processed materials and composites to supplement the database of material components and mechanical properties in the digital system.
These processing steps certainly would provide great challenges to be automated at a small scale, but several advantages would be conferred to the system through their integration. First, the system would gain the capability to alter parameters such as particle size or fiber length within a stock, both of which could have dramatic impacts on mechanical properties in composites. Additionally, the system would gain the ability to explore the incorporation of reagents that may not have been thought of by researchers. If creating delignated cellulose, the system would gain access to lignin, which may confer novel properties to composites. This autonomous exploration of materials would allow the system to access a much broader design space than the previous iterations.
The previously mentioned challenges of working with hydrophobic materials that may not readily interact with hydrogels is a key consideration in this fully automated workflow. With its described ability to refine its own reagents to be incorporated into inks, the system must have a mechanism by which it can evaluate the homogeneity of its solutions and ensure the compatibility of the selected reagents. Computer vision may provide an avenue for such assessments by examining visual indicators of compatibility such as solvent leaking from printed material or homogenized solutions separating into their component reagents over time, but these simplified tests do not provide data related to the degree of hydrophobicity. A superior system would be capable of preparing surfaces of the material in question and measuring the contact angle of water droplets on its surface,20 providing a quantitative means of evaluating hydrophobicity and determining reagent compatibility.
Additional expansions to the system’s characterization capabilities could be achieved more readily. For example, the computer-vision system so far applied to detect failures and calibrate the manufacturing process could be extended to conduct visual analyses of materials, gathering data on their color and texture. If additions were made to the experiment area such as temperature control and a live-soil bed, simplified biodegradation tests could be conducted in order to gain an understanding of environmental impact. In this test, the digital system would observe manufactured samples as they degrade in live soil, measuring their surface area until they are fully decomposed.6 Additionally, the humidity and temperature controls required for such tests could facilitate discovery of responsive composites such as shape-changing cellulosic composites described in prior research.9
Computer vision further provides a means of assessing factors in printed composites such as shape deformation or geometric features.43 This could allow the system to explore the impact of geometry, as well as material composition, on composite performance in order to develop insights into structure-function relationships or create hierarchical functional geometries. Within this exploration, ML methods may also prove advantageous in hierarchical geometries as demonstrated through the use of generative adversarial networks to transfer hierarchical structures to input designs5 or deep neural networks for topology optimization.10 This function could allow the additive manufacturing system to create not just testing geometries but complex structures with specific applications.
As the system is already equipped with a means of dispensing water and regulating temperature and humidity, it could feasibly maintain not just a live-soil bed but also additional living organisms. An example of this function could be experimentation with living materials. Mycelium-based materials have gained substantial attention in recent years due to their high potential in the creation of sustainable functional materials.31 Similar to the fabrication of biocomposites, the cultivation of mycelium requires dedicated labor that makes experimentation challenging. However, the described system already contains mechanisms that could monitor the growth of fungal species, the harvesting of live mycelium, and its incorporation into biocomposites. Biotic materials inherently display high levels of biocompatibility, and mycelium is known to grow within cellulosic stocks. Once successfully cultivated, the incorporation of live mycelium into the described manufacturing process could proceed without any major changes to the system due to the absence of synthetic binding agents or high heat. Beyond exploration of the impact of fungal colonization on composite behavior, the chitin produced by such species could be refined by the system to create chitosan for future biocomposites.2 This cultivation of symbiotic species has high potential for enabling closed-loop material systems and the discovery of unexpected material behaviors.
At this level of development, the described system comprises a self-contained laboratory for the discovery of sustainable functional materials with a capacity that extends beyond many existent research groups. While such a system would certainly be a challenge to build today, its future implementation could lead to the discoveries that we would never achieve through wrought experimentation.
Conclusions and outlook
To this point, we have described several iterations of a system for the automated discovery of sustainable materials. The first of these iterations can be achieved with existing equipment and, in combination with AI platforms, would dramatically accelerate the current rate of experimentation and materials discovery. The final iteration described is a far-reaching automated laboratory with capabilities that exceed the current state of the art, examining a multitude of interactions between materials and the environment in an open-ended system of discovery. No matter the degree to which the system is automated, its scope and capabilities are determined by its design as specified by researchers. There are ethical considerations related to the automation of such a system, the likes of which could displace a substantial number of human researchers. What, then, should be the role of human researchers beyond the building of such a system?
One clear answer to this question is that human researchers are required to understand and define the system’s goals. If the system is attempting to find a sustainable alternative to an existing material, then it may be advantageous to equip its digital environment with optimization methods that define fitness based on specified properties. Or, if the system’s goal is simply to identify novel composites, it may be benefitted through the use of novelty as a fitness parameter wherein it searches out composites that vary the most from what has already been created.27 There are many such adaptations of the described system that need not impact the configuration of the physical experimentation environment and can be achieved solely through the specification of goals in the digital environment.
There are also exciting opportunities at the intersection of advanced experimental and computational methods, for instance the use of interpretable ML tools. These tools can help us understand what and how deep neural networks learn and teach humans insights gleaned from such systems. This can result in human-readable materiomic insights about material process-structure-function relationships. The connections made between input and output datasets in ML processes are often opaque and not readily interpretable by humans. However, these connections could hold valuable insights on the impact of processing, composition, structure, and behavior of biocomposites. This ability to examine the specific insights made during the learning process, known as interpretability,35 could expand the utility of the described system to allow for unexpected insights and knowledge to be gleaned beyond the goals set by the experimenters. Methods have been developed to compute the relevance of connections made in Transformer networks,7 and a number of models such as those based on regression or decision trees can be interpreted more readily.25
Interpreted insights regarding the relationship between the manufacturing process, material composition, and structure and behavior of composites could have far-reaching implications beyond the design of structural biocomposites. Such relationships could expand fields such as biomimetics and the design of hierarchical materials8 or the optimization of manufacturing processes.46 The integration of such methods within the described system shifts its function from solely the creation of functional materials to additionally serving as a knowledge engine capable of informing research across fields.
Prior research and the abundance of remarkable functional materials in nature demonstrate the capabilities of biomass-based materials. The discovery of sustainable functional composites could be greatly accelerated through existing automation systems, and there is great capacity for further extensions that would improve the rate of research. At a time when there is an urgent need for sustainable solutions, such a system as the one described here could have a dramatic impact to move toward a more sustainable future.
Figure 2. Source material selection and experimental goal definition for state-of-the-art research on the discovery of functional biocomposites.
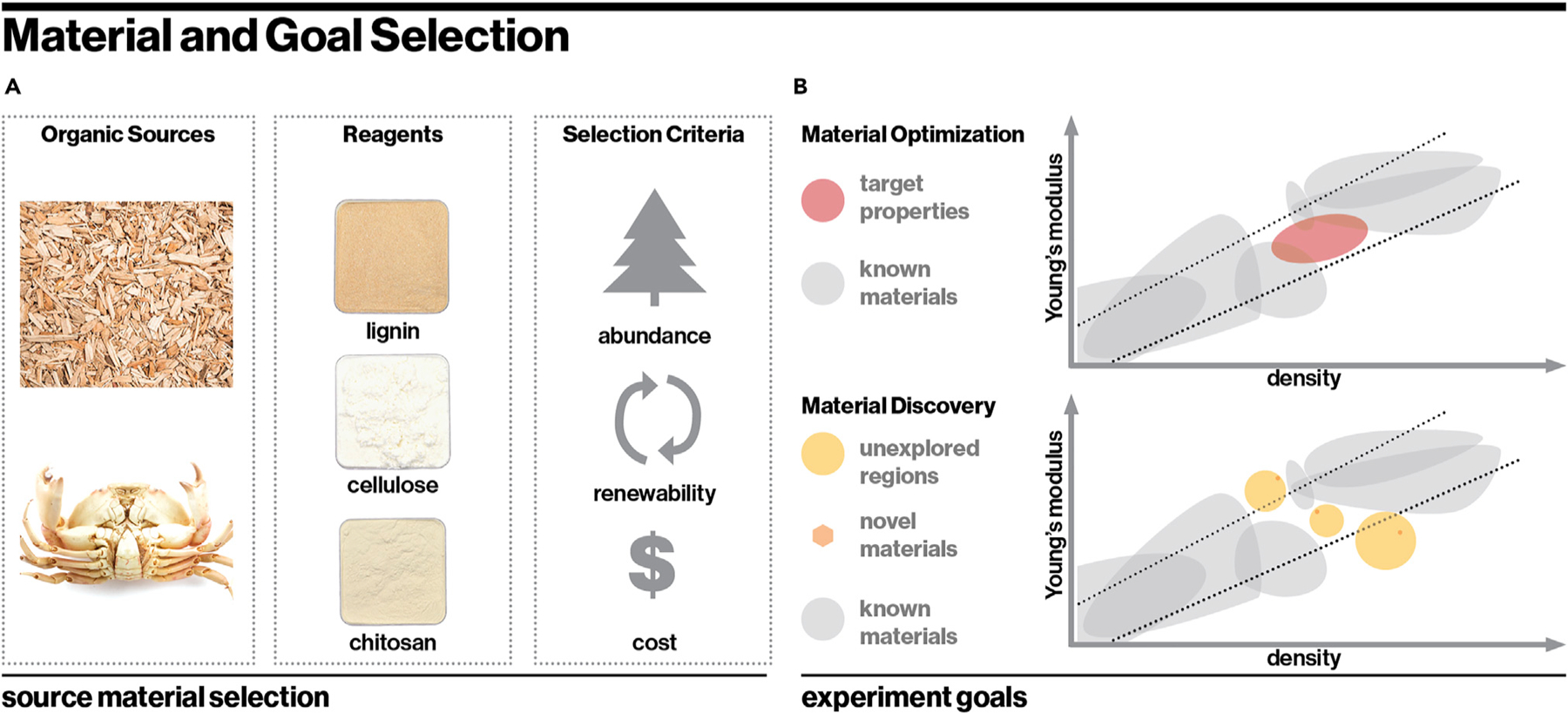
(A) Sources of material are selected based on environmental impact factors such as abundance or renewability as well as practical factors such as their cost.
(B) Experimental goals may be targeted such as the optimization of specific material properties or the discovery of composites with novel properties.
Figure 3. Mixing of source materials into biotic material hydrogels suitable for 3D printing.
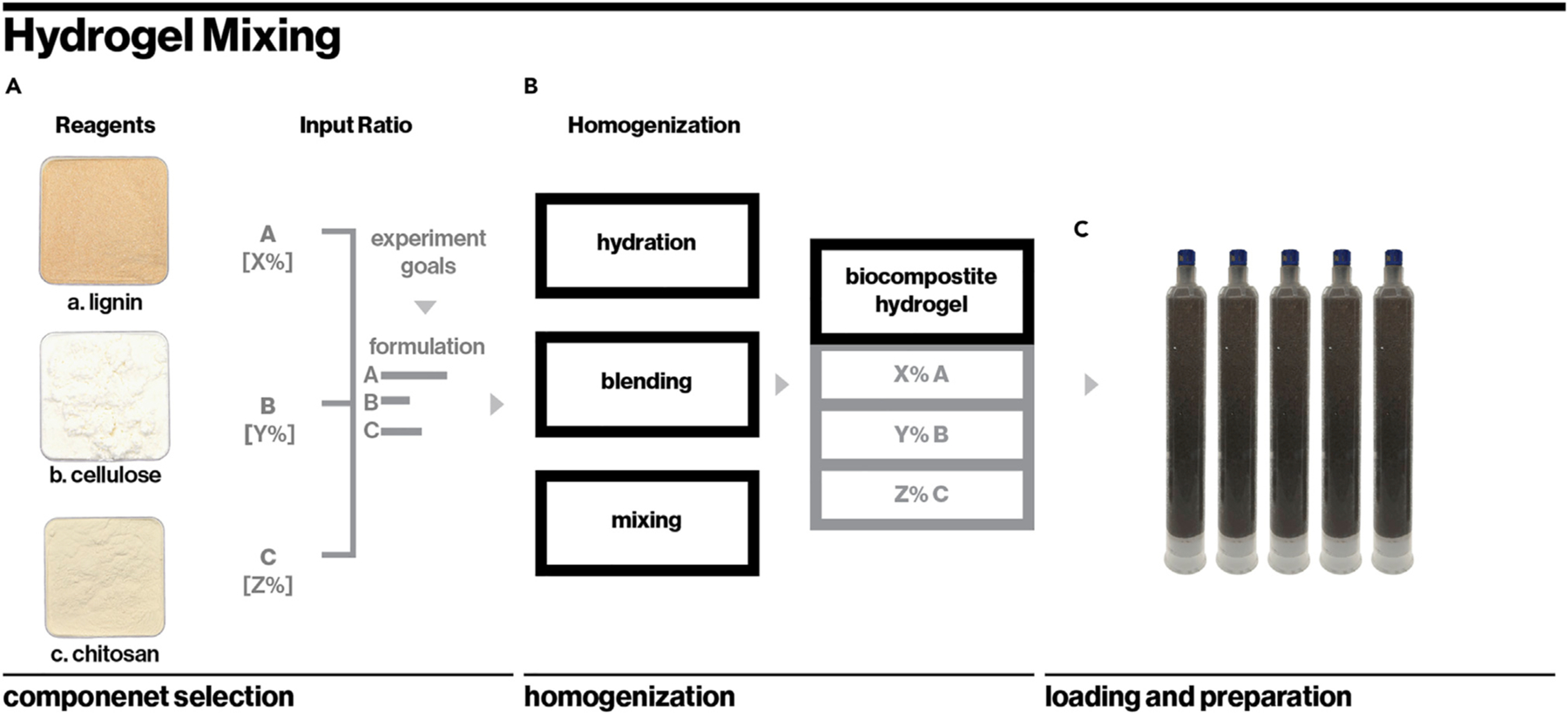
(A and B) Refined biotic materials are (A) combined with water and (B) homogenized using mechanical blending and mixing. The relative ratios of each input material determine the properties of the dried composite.
(C) Blended hydrogels are loaded into cartridges for pneumatic extrusion.
Figure 4. Additive manufacturing of biocomposites.
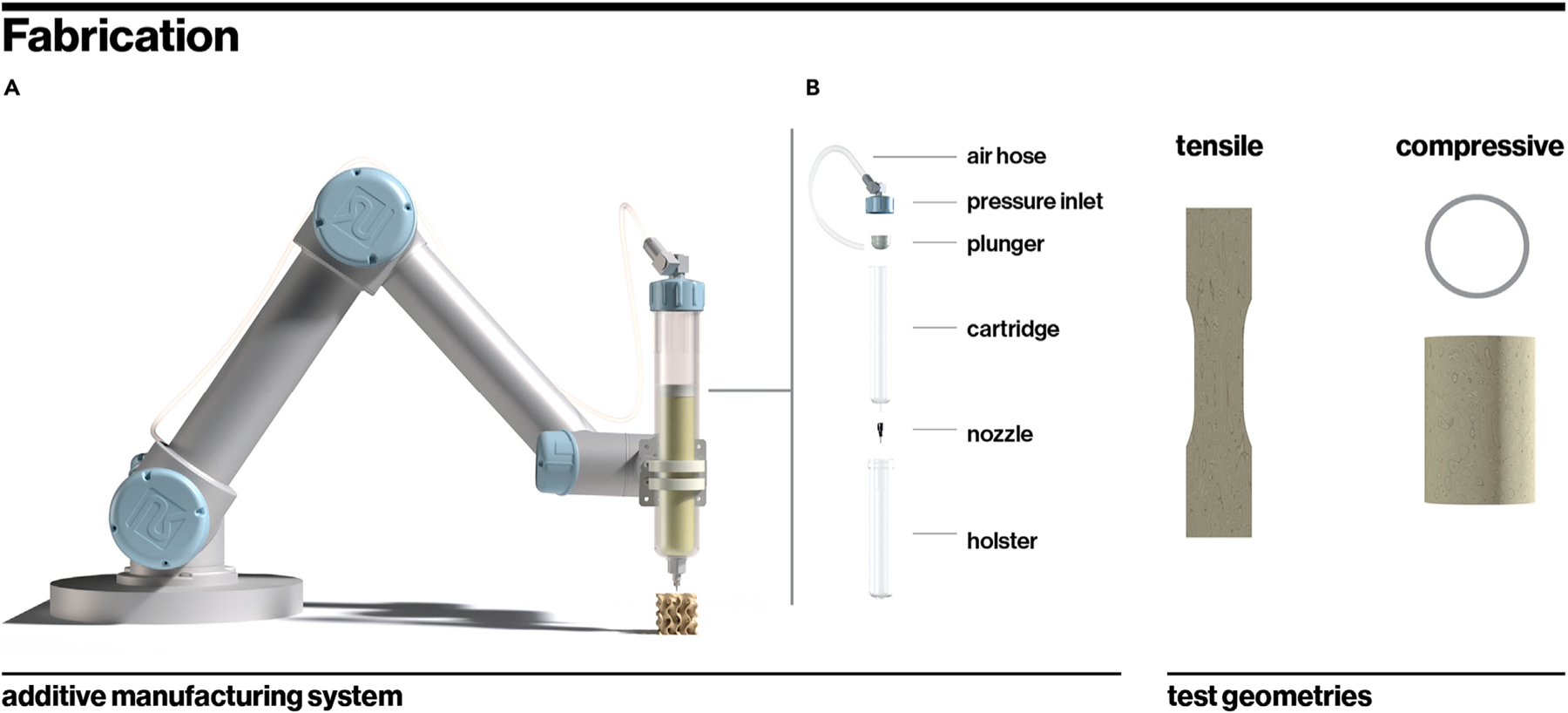
(A) A robotic arm is outfitted with a pneumatic extruder that prints multiple layers of semi-solid hydrogels in specified geometries.
(B) Water evaporates out of the printed gels to form solid biocomposites. Biocomposites can be fabricated into geometries suited for mechanical testing such as dogbones for tensile or compressive tests.
Figure 5. Mechanical testing of biocomposites.
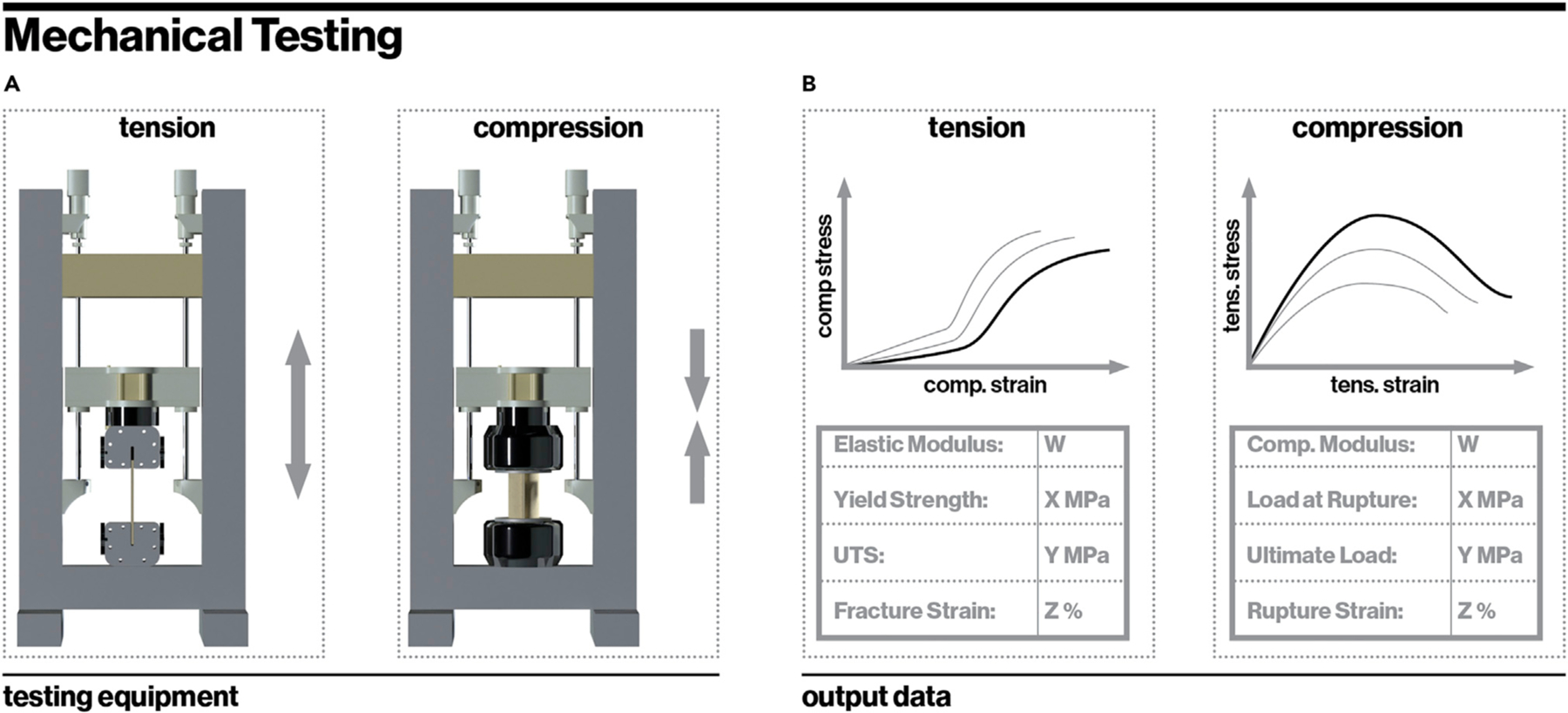
(A and B) Tensile and compressive testing of dried biocomposites provides information on the relative impact of input material components on mechanical properties (A) such as tensile or compressive strength, effective moduli, and more (B).
Figure 6. Modeling and the selection of future experiments.
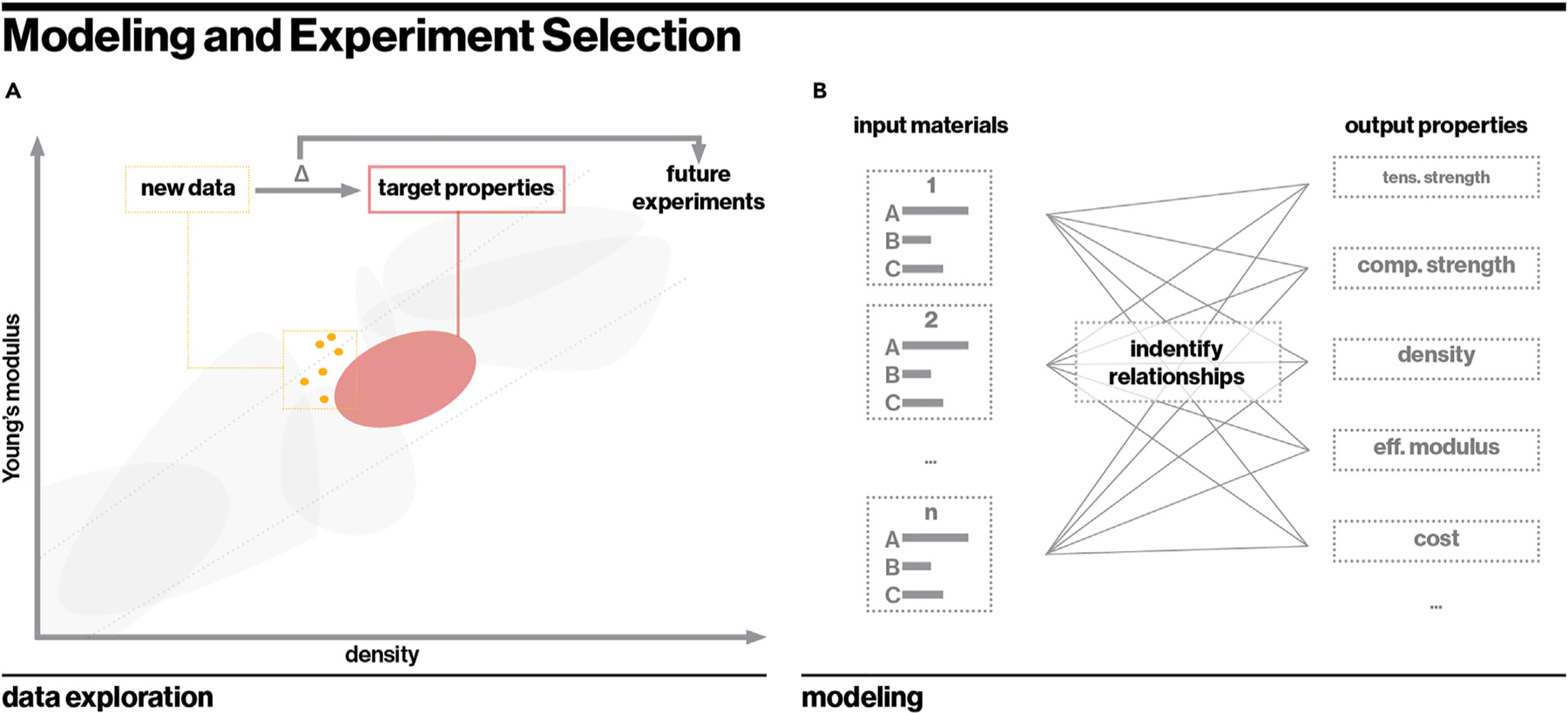
(A) Experimental data are added to a growing dataset in order to examine the relationship between composite components and mechanical properties. The difference between the ideal target properties for the biocomposite and the current data can provide a vector to inform future experiments.
(B) With sufficient data, models can be trained to identify relationships between input materials and output properties.
PROGRESS AND POTENTIAL.
With the growing impacts of climate change, there is an urgent need for the development of functional materials with reduced environmental impact. The diverse array of functional materials that occur naturally is evidence of the potential for such materials to be developed from renewable, sustainable resources, but creating composites from organic stocks with such properties is often a time- and labor-intensive process. We outline an automated system for the discovery of sustainable, functional materials composed from stocks of organic biomass. The most basic form of this system can be constructed with existing resources, and further extensions that could improve its capacity and long-term potential are outlined. This system and its extensions hold the capacity to accelerate the discovery of new functional, sustainable materials.
ACKNOWLEDGMENTS
We acknowledge support from NSF GRFP (grant no. 1745302), the MIT Media Lab, USDA (2021-69012-35978), ARO (W911NF1920098), NIH (U01EB014976 and 1R01AR077793), and ONR (N00014-19-1-2375 and N00014-20-1-2189). Additional support from the IBM-AI Watson AI Lab and MIT Quest is acknowledged.
Footnotes
DECLARATION OF INTERESTS
The authors declare no competing interests.
REFERENCES
- 1.Abdul Khalil HPS, Bhat IUH, Jawaid M, Zaidon A, Hermawan D, and Hadi YS (2012). Bamboo fibre reinforced biocomposites: a review. Mater. Des 42, 353–368. 10.1016/J.MATDES.2012.06.015. [DOI] [Google Scholar]
- 2.Abo Elsoud MM, and el Kady EM (2019). Current trends in fungal biosynthesis of chitin and chitosan. Bull. Natl. Res. Cent 43, 59. 10.1186/S42269-019-0105-Y. [DOI] [Google Scholar]
- 3.Ashby MF, Gibson LJ, and Wegst U (1995). The mechanical properties of natural materials: material property charts. Proc. R. Soc. A Math. Phys. Sci 450, 123–140. 10.1098/rspa.1995.0075. [DOI] [Google Scholar]
- 4.Buehler MJ (2022). FieldPerceiver: domain agnostic transformer model to predict multiscale physical fields and nonlinear material properties through neural ologs. Mater Today 57, 9–25. 10.1016/J.MATTOD.2022.05.020. [DOI] [Google Scholar]
- 5.Buehler MJ (2022). DeepFlames: neural network-driven self-assembly of flame particles into hierarchical structures. MRS Commun 12, 257–265. 10.1557/S43579-022-00171-Y/FIGURES/8. [DOI] [Google Scholar]
- 6.Calmon A, Dusserre-Bresson L, Bellon-Maurel V, Feuilloley P, and Silvestre F (2000). An automated test for measuring polymer biodegradation. Chemosphere 41, 645–651. 10.1016/S0045-6535(99)00491-9. [DOI] [PubMed] [Google Scholar]
- 7.Chefer H, Gur S, and Wolf L (2021). Transformer interpretability beyond attention visualization. Preprint at arXiv 10.48550/arXiv.2012.09838. [DOI]
- 8.Helfman Cohen Y, Reich Y, and Greenberg S (2014). Biomimetics: structure-function patterns approach. J. Mech. Des. N. Y 136. 10.1115/1.4028169/375227. [DOI] [Google Scholar]
- 9.Correa D, Papadopoulou A, Guberan C, Jhaveri N, Reichert S, Menges A, and Tibbits S (2015). 3D-Printed wood: programming hygroscopic material transformations. 3D Print. Addit. Manuf 2, 106–116. 10.1089/3DP.2015.0022/ASSET/IMAGES/LARGE/FIGURE14.JPEG. [DOI] [Google Scholar]
- 10.Deng C, Wang Y, Qin C, Fu Y, and Lu W (2022). Self-directed online machine learning for topology optimization. Nat. Commun 13, 388–414. 10.1038/s41467-021-27713-7. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 11.Diyana ZN, Jumaidin R, Selamat MZ, and Suan MSM (2021). Thermoplastic starch/beeswax blend: characterization on thermal mechanical and moisture absorption properties. Int. J. Biol. Macromol 190, 224–232. 10.1016/J.IJBIOMAC.2021.08.201. [DOI] [PubMed] [Google Scholar]
- 12.Fernandez JG, and Ingber DE (2012). Unexpected strength and toughness in chitosan-fibroin laminates inspired by insect cuticle. Adv. Mater 24, 480–484. 10.1002/ADMA.201104051. [DOI] [PubMed] [Google Scholar]
- 13.Fernandez JG, Ingber DE, Fernandez JG, Ingber DE, Ingber Vascular DE, and Program B (2014). Manufacturing of large-scale functional objects using biodegradable chitosan bioplastic. Macromol. Mater. Eng 299, 932–938. 10.1002/MAME.201300426. [DOI] [Google Scholar]
- 14.Geyer R, Jambeck JR, and Law KL (2017). Production, use, and fate of all plastics ever made. Sci. Adv 3, e1700782. 10.1126/SCIADV.1700782/SUPPL_FILE/1700782_SM.PDF. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 15.Goh GD, Sing SL, and Yeong WY (2021). A review on machine learning in 3D printing: applications, potential, and challenges. Artif. Intell. Rev 54, 63–94. 10.1007/s10462-020-09876-9. [DOI] [Google Scholar]
- 16.Gormley AJ, and Webb MA (2021). Machine learning in combinatorial polymer chemistry. Nat. Rev. Mater 6, 642–644. 10.1038/s41578-021-00282-3. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 17.Graupner N, Albrecht K, Ziegmann G, Enzler H, and Muessig J (2016). Influence of reprocessing on fibre length distribution, tensile strength and impact strength of injection moulded cellulose fibre-reinforced polylactide (PLA) composites. Express Polym. Lett 10, 647–663. 10.3144/EXPRESSPOLYMLETT.2016.59. [DOI] [Google Scholar]
- 18.Guo K, Yang Z, Yu CH, and Buehler MJ (2021). Artificial intelligence and machine learning in design of mechanical materials. Mater. Horiz 8, 1153–1172. 10.1039/D0MH01451F. [DOI] [PubMed] [Google Scholar]
- 19.Gurunathan T, Mohanty S, and Nayak SK (2015). A review of the recent developments in biocomposites based on natural fibres and their application perspectives. Compos. Appl. Sci. Manuf 77, 1–25. 10.1016/J.COMPOSITESA.2015.06.007. [DOI] [Google Scholar]
- 20.Hirvonen J, Lai Y, Kallio P, Cunha G, and Rojas O (2017). Automated estimation of contact angle on hydrophobic fibers using a microrobotic platform In IEEE 3M-NANO 2016 – 6th IEEE International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale 130–135. 10.1109/3M-NANO.2016.7824935. [DOI] [Google Scholar]
- 21.Jackson NE, Webb MA, and de Pablo JJ (2019). Recent advances in machine learning towards multiscale soft materials design. Curr. Opin. Chem. Eng 23, 106–114. 10.1016/J.COCHE.2019.03.005. [DOI] [Google Scholar]
- 22.Janzen WP (2014). Screening technologies for small molecule discovery: the state of the art. Chem. Biol 21, 1162–1170. 10.1016/J.CHEMBIOL.2014.07.015. [DOI] [PubMed] [Google Scholar]
- 23.John M, and Thomas S (2008). Biofibres and biocomposites. Carbohydr. Polym 71, 343–364. 10.1016/J.CARBPOL.2007.05.040. [DOI] [PubMed] [Google Scholar]
- 24.Guo K, and Buehler MJ (2022). Rapid prediction of protein natural frequencies using graph neural networks. Digit. Discov 1, 277–285. 10.1039/D1DD00007A. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 25.Laugel T, Lesot M-J, Marsala C, Renard X, and Detyniecki M (2017). Inverse classification for comparison-based interpretability in machine learning. Preprint at arXiv 10.48550/arXiv.1712.08443. [DOI]
- 26.Law BE, Berner LT, Buotte PC, Mildrexler DJ, and Ripple WJ (2021). Strategic Forest Reserves can protect biodiversity in the western United States and mitigate climate change. Commun. Earth Environ 2, 254. 10.1038/s43247-021-00326-0. [DOI] [Google Scholar]
- 27.Lehman J, and Stanley KO (2011). Novelty search and the problem with objectives. In Genetic Programming Theory and Practice IX. Genetic and Evolutionary Computation, Riolo R, Vladislavleva E, and Moore J, eds., pp. 37–56. 10.1007/978-1-4614-1770-5_3. [DOI] [Google Scholar]
- 28.Lei B, Quinn Kirk T, Bhattacharya A, Pati D, Qian X, Arroyave R, and Mallick BK (2021). Bayesian optimization with adaptive surrogate models for automated experimental design. npj. Comput. Mater 7, 194. 10.1038/s41524-021-00662-x. [DOI] [Google Scholar]
- 29.Lew AJ, and Buehler MJ (2022). DeepBuckle: extracting physical behavior directly from empirical observation for a material agnostic approach to analyze and predict buckling. J. Mech. Phys. Solids 164, 104909. 10.1016/J.JMPS.2022.104909. [DOI] [Google Scholar]
- 30.Liu FY, Ni B, and Buehler MJ (2022). PRESTO: rapid protein mechanical strength prediction with an end-to-end deep learning model. Extreme Mech. Lett 55, 101803. 10.1016/J.EML.2022.101803. [DOI] [Google Scholar]
- 31.Manan S, Ullah MW, Ul-Islam M, Atta OM, and Yang G (2021). Synthesis and applications of fungal mycelium-based advanced functional materials. J. Bioresour. Bioprod 6, 1–10. 10.1016/J.JOBAB.2021.01.001. [DOI] [Google Scholar]
- 32.Mannodi-Kanakkithodi A, Chan MKY, and Chan MKY (2020). Computational data-driven materials discovery. Trends in Chemistry 3, 79–82. [Google Scholar]
- 33.Mogas-Soldevila L, and Oxman N (2015). Water-based engineering & fabrication: large-scale Additive manufacturing of biomaterials. MRS Proc 1800, 7. 10.1557/OPL.2015.659. [DOI] [Google Scholar]
- 34.Mohanty AK, Misra M, and Hinrichsen G (2000). Biofibres, biodegradable polymers and biocomposites: an overview. Macromol. Mater. Eng 276–277, 1–24.
- 35.Murdoch WJ, Singh C, Kumbier K, Abbasi-Asl R, and Yu B (2019). Definitions, methods, and applications in interpretable machine learning. Proc. Natl. Acad. Sci. USA 116, 22071–22080. 10.1073/PNAS.1900654116/SUPPL_FILE/PNAS.1900654116.SAPP.PDF. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 36.Numata K, Yamazaki S, Katashima T, Chuah J-A, Naga N, and Sakai T (2014). Silk-pectin hydrogel with superior mechanical properties, biodegradability, and biocompatibility. Macromol. Biosci 14, 799–806. 10.1002/mabi.201300482. [DOI] [PubMed] [Google Scholar]
- 37.Pathan M.v., Ponnusami SA, Pathan J, Pitisongsawat R, Erice B, Petrinic N, and Tagarielli VL (2019). Predictions of the mechanical properties of unidirectional fibre composites by supervised machine learning. Sci. Rep 9, 13964. 10.1038/s41598-019-50144-w. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 38.Sitthi-Amorn P, Ramos JE, Wangy Y, Kwan J, Lan J, Wang W, and Matusik W (2015). MultiFab: a machine vision assisted platform for multi-material 3D printing. ACM Trans. Graph 34, 1–11. 10.1145/2766962. [DOI] [Google Scholar]
- 39.Sanandiya ND, Vijay Y, Dimopoulou M, Dritsas S, and Fernandez JG (2018). Large-scale additive manufacturing with bioinspired cellulosic materials. Sci. Rep 8, 8642. 10.1038/s41598-018-26985-2. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 40.Singhvi MS, Chaudhari S, and Gokhale DV (2014). Lignocellulose processing: a current challenge. RSC Adv 4, 8271–8277. 10.1039/c3ra46112b. [DOI] [Google Scholar]
- 41.Stettixius K (1934). De-airing in an ordinary pug mill. J. Am. Ceramic. Soc 20, 87–89. [Google Scholar]
- 42.Stips A, MacIas D, Coughlan C, Garcia-Gorriz E, and Liang XS (2016). On the causal structure between CO2 and global temperature. Sci. Rep 6, 21691. 10.1038/srep21691. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 43.Sutton MA (2013). Computer vision-based, noncontacting deformation measurements in mechanics: a generational transformation. Appl. Mech. Rev 65, 050802. 10.1115/1.4024984/369984. [DOI] [Google Scholar]
- 44.Vijay Y, Sanandiya ND, Dritsas S, and Fernandez JG (2019). Control of process settings for large-scale additive manufacturing with sustainable natural composites. J. Mech. Des. N. Y 141, 081701. 10.1115/1.4042624/727191. [DOI] [Google Scholar]
- 45.Wang X, Rai N, Merchel Piovesan Pereira B, Eetemadi A, and Tagkopoulos I (2020). Accelerated knowledge discovery from omics data by optimal experimental design. Nat. Commun 11, 5026. 10.1038/s41467-020-18785-y. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 46.Wu J (2018). Study on optimization of 3D printing parameters. IOP Conf. Ser. Mater. Sci. Eng 392, 062050. 10.1088/1757-899X/392/6/062050. [DOI] [Google Scholar]
- 47.UCLA’s Molecular Screening Shared Resource: Enhancing Small...: Ingenta Connect. [DOI] [PubMed]
- 48.AT6 6-Axis Robotic Automated Testing System - Instron.