

Abstract
Powered lower limb prostheses can assist users in a variety of ambulation modes by providing knee and/or ankle joint power. This study's goal was to develop a flexible control system to allow users to perform a variety of tasks in a natural, accurate, and reliable way. Six transfemoral amputees used a powered knee-ankle prosthesis to ascend/descend a ramp, climb a 3- and 4-step staircase, perform walking and standing transitions to and from the staircase, and ambulate at various speeds. A mode-specific classification architecture was developed to allow seamless transitions at four discrete gait events. Prosthesis mode transitions (i.e., the prosthesis' mechanical response) were delayed by 90 ms. Overall, users were not affected by this small delay. Offline classification results demonstrate significantly reduced error rates with the delayed system compared to the non-delayed system (p<0.001). The average error rate for all heel contact decisions was 1.65% [0.99%] for the non-delayed system and 0.43% [0.23%] for the delayed system. The average error rate for all toe off decisions was 0.47% [0.16%] for the non-delayed system and 0.13% [0.05%] for the delayed system. The results are encouraging and provide another step towards a clinically viable intent recognition system for a powered knee-ankle prosthesis.
Index Terms: Above-knee amputation, Intent recognition, Robotic leg control, Signal processing
I. Introduction
A new generation of lower limb prosthetic devices has emerged to restore function and mobility to individuals with a major lower limb amputation. Powered prosthetic knees and ankles can provide amputees with near physiological joint power at the knee and/or ankle [1-4] and assist them in performing a variety of ambulation modes. Novel control strategies have been developed to assist amputee users during steady-state level-ground walking, inclined-surface walking, stair climbing, and standing up from a seated position. Control of these powered devices within an ambulation mode is often achieved through finite state machines; mechanical sensors embedded into the prosthesis can be used to identify different portions of the gait cycle (e.g., swing or stance phase) and modify the device's response (e.g., provide resistance, generate power, etc.) [1, 2, 5-10].
A challenge exists as to how to best transition these devices from one mode to another. Ideally, users should be able to transition between ambulation modes in a natural, seamless, and reliable way. The most basic, albeit cumbersome, ways include pressing a button on a key fob or performing an exaggerated motion with the residual limb [3, 11]. Recently, pattern recognition algorithms have been used for ambulation mode classification in lower limb prostheses; these systems predict an upcoming mode transition and transition the prosthesis appropriately. Studies have reported results using a range of mechanical sensors (e.g., goniometers, load cells, inertial measurement units) [12-14], electrophysiological sensors (e.g., electromyography) [1, 15, 16], environment sensors (e.g., vision) [17, 18], classification methods (e.g., support vector machine, linear discriminant analysis, dynamic Bayesian network) [16, 19-21], and classifier training mechanisms [14, 22, 23] for lower limb pattern recognition systems. Data classification has been performed at discrete points during each gait cycle (e.g., at heel contact or toe off) [15, 21] or continuously throughout the gait cycle [16, 22]. While these system results are promising, error rates with transfemoral amputee users remain relatively high when predicting mode transition steps compared to steady-state steps.
Investigations into ambulation mode transition steps highlight a critical timing window [16, 24] in which the prosthesis can safely switch from one ambulation mode to another. The more recent study [24] identified four to five gait phases (e.g., terminal double support, swing flexion, swing extension prior to the surface transition or initial double support after the surface transition) where a powered prosthesis could transition between level-ground walking and inclined-surface walking and not disrupt the user's balance. This new research suggests that delaying the ambulation mode transition by a small window of time may not affect user performance. Another study, which tested the effects of ambulation mode prediction system errors (i.e., misclassifications) on real-time performance of amputee users, demonstrated that depending on the ambulation mode and gait phase of the error, transfemoral amputee users either did not notice some errors or noticed them but still felt stable [25]. However, errors during other mode transitions, such as the transitions between level-ground walking and stair climbing, may result in more noticeable or substantial errors [19, 21]; the critical timing window for these transitions is not yet defined. These findings are important because delaying the timing of ambulation mode transitions by a small window may improve ambulation mode prediction accuracy without noticeably affecting the user's performance.
To further improve lower limb powered prosthesis control systems, studies need to account for wider variability within the collected data set. Many of the previously described systems required amputee users to be fairly deliberate in their ambulation during data collection. Multiple trials were recorded of users performing the same ambulation task in a similar way each time [14]. While these exemplars help to create a more accurate system representing the data collected, it may not translate to a more reliable system when the amputee user leaves the laboratory. System architectures need to be updated to account for user preferences in speed, various approaches to obstacles, and variability in the environment.
The goal of this study was to create a flexible and more accurate lower limb intent recognition system for powered knee-ankle prostheses. We refined our existing system [21] by incorporating a standing mode, a mode-specific classifier system [23], and additional prosthesis transitions that allowed users to ascend and descend even- and odd-numbered staircases from standing or walking at various approach angles. We investigated the effect that a 90 ms delay in ambulation mode transitions had on the accuracy of each mode-specific classifier which allowed transfemoral amputee users to transition between six modes (standing, level-ground walking, ramp ascent, ramp descent, stair ascent, and stair descent) at various discrete time points during the gait cycle. We hypothesized that the delayed system would result in fewer errors than a non-delayed system.
II. Methods
Powered Knee-Ankle Prosthesis Control
A third generation powered knee-ankle prosthesis designed by Vanderbilt University [2, 26] was used in this study. Joint torques, τi, were modulated according to an impedance-based model:
| (1) |
where i corresponded to the knee or ankle joint, θ was the joint angle, and θ̇ was the joint angular velocity. Impedance parameters, stiffness, k, equilibrium angle, θe, and damping coefficient, b, were modified according to a finite state machine. Relative joint angles and velocities were measured from a subset of the sensors embedded within the prosthesis. A complete list of sensors is available in Section II.C.
The finite state machine, refined from previous versions [2, 6-8, 21], included a standing mode and five ambulation modes (i.e., level-ground walking, ramp ascent, ramp descent, stair ascent, and stair descent). Knee and ankle impedance parameters were modulated within each state according to previously defined control strategies [5, 8], and sensor data, evaluated in 30 ms increment windows, transitioned the prosthesis between states within a mode. The enhanced state machine architecture allowed the prosthesis to transition between modes at discrete time points during the gait cycle including heel contact, mid-stance, toe off, and mid-swing. Most between-mode transitions were initially governed by key fob input from the experimenter; however, some between-mode transitions were executed based on mechanical sensor data and/or timers, including transitions from:
standing to level-ground walking based on axial shank force, prosthesis ankle angle, and shank inclination angle (Fig. 1);
level-ground walking to standing based on a timer or to standing swing phase based on axial shank force (Fig. 1); and
stair ascent to standing based on axial shank force and prosthesis knee velocity.
Fig.1.
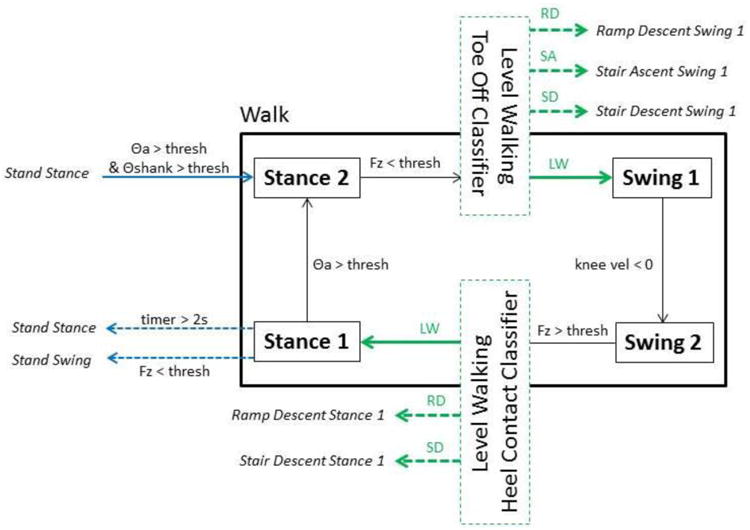
A portion of the finite state machine is shown for walking mode only. Within-mode transitions that occurred based on mechanical sensor data are shown with black arrows. Between-mode transitions that occurred based on mechanical sensors are shown with blue arrows. Between-mode transitions that occur based on the execution of a key fob or a pattern recognition classifier are shown with green arrows. Walking mode transitions are displayed with solid lines and all outgoing ambulation mode transitions from walking mode are displayed with dashed lines.
With this system, users had the ability to freely ambulate about a laboratory environment consisting of a level-ground walking surface, a 10 degree inclined surface, a 4-step staircase, and a 3-step staircase. When ascending and descending the 4-step staircase, only heel contact and toe off transitions were necessary to provide a seamless transition to and from level-ground walking. When ascending and descending the 3-step staircase, additional mode transitions (i.e., mid-swing and mid-stance, respectively) were necessary for the transitions from stair ascent or stair descent to level-ground walking. Users were also able to ascend or descend both staircases using a standing or a walking approach; previous systems had only allowed for a walking approach [14, 20].
B. Experimental Protocol
Six individuals with a unilateral transfemoral or knee disarticulation amputation gave written informed consent to participate in this study (Table I). All users were capable of community ambulation with Medicare functional classification levels K3 or K4. Users were fitted to the powered knee-ankle prosthesis by a certified prosthetist and had previous experience (minimum of 5 hours) ambulating on the device (Fig. 2).
Table I. Subject Demographics.
| User | Gender | Age (years) | Time Post-Amputation (years) | Weight (kg) | Etiology | Amputation Level |
|---|---|---|---|---|---|---|
|
| ||||||
| TF1 | Male | 57 | 45 | 83.9 | Left Traumatic | Transfemoral |
| TF2 | Male | 66 | 39 | 86.2 | Right Traumatic | Transfemoral |
| TF3 | Female | 23 | 8 | 52.2 | Left Sarcoma | Transfemoral |
| TF4 | Male | 30 | 18 | 86.2 | Left Sarcoma | Knee Disarticulation |
| TF5 | Male | 44 | 19 | 96.6 | Left Traumatic | Transfemoral |
| TF6 | Male | 25 | 1 | 72.6 | Right Sarcoma | Transfemoral |
|
| ||||||
| Mean [SD] | - | 40.8 [17.8] | 21.7 [17.2] | 79.6 [15.5] | - | - |
Fig. 2.

A transfemoral amputee wearing the powered knee-ankle prosthesis demonstrating various transitions from stair descent to level-ground walking.
Users were allowed to practice using the powered prosthesis for all ambulation modes prior to data collection. A physical therapist was present to assist them and ensure safety. Once users were comfortable and the device was properly configured for each mode [8], they performed a series of in-laboratory ambulation tasks while an experimenter manually triggered the powered prosthesis into the correct mode. In order to investigate both a delayed mode transition system and a non-delayed mode transition system, steady-state and between-mode transitions were delayed by 90 ms during data collection. Pilot tests revealed that users' performance and stability was not affected by delaying these transitions by 90 ms [27]. The tasks included:
a circuit of level-ground walking approaches to and from ramp ascent and descent on a 10 degree inclined surface and stair ascent and descent on either a 4-step staircase (10 trials) or a 3-step staircase (10 trials);
climbing stairs in a stairwell (4 flights);
climbing up two steps, standing, climbing up two steps, standing, turning around, descending the steps in the same manner (20 trials);
walking at various speeds, straight-line walking, and walking in circles (10 trials total); and
standing including shuffle steps, turning, and quiet standing (5 trials).
Users led with their sound side for all stair ascent approaches, with their prosthesis side for all stair descent approaches, and with either side for ramp ascent and ramp descent approaches. To increase variability for all circuit trials, users approached the ramp and staircase from various angles (i.e., straight, 45 degrees, or 90 degrees). This protocol allowed for the collection of both the steady-state ambulation tasks and seamless mode transitions required to train a lower limb intent recognition system [14].
C. Pattern Recognition System Configuration and Evaluation
Data from 18 mechanical sensors embedded on the prosthesis were recorded at 500 Hz including: knee and ankle joint angles and velocities, motor currents, prosthesis acceleration and rotational velocity, calculated thigh and shank inclination angles, and 6-Degree Of Freedom (DOF) forces and moments. The mode and state of the powered prosthesis were also recorded to serve as labels for the data.
A mode-specific classifier system was trained to predict transitions between ambulation modes (Table II, Fig. 1, and Fig. 3) [23]. Level-ground walking and ramp ascent data were treated as one class. This data grouping was chosen because these two modes had similar impedance parameter settings [8], and previous systems have shown that ramp ascent mode can be incorporated into the walking class mode [6, 28]. The Toe Off (TO) classifier was not mode-specific (i.e., the same classifier was used at toe off during level-ground walking, ramp descent, and stair descent) because there were no trained mode transition examples at toe off from stair/ramp descent back to level-ground walking. Since the data were collected with a 90 ms delay for all ambulation mode transitions, simple post- processing was necessary to evaluate a non-delayed system using the same data set. For the non-delayed system, data were segmented into 300 ms windows immediately preceding gait events (e.g., from 300 ms before heel contact to heel contact). For the delayed system, data were segmented into 300 ms windows starting 210 ms before gait events (e.g., from 210 ms before heel contact to 90 ms after heel contact). A feature set including mean, standard deviation, maximum and minimum values and initial and final values was extracted from the data in each analysis window [22]. The dimensionality of this feature set was reduced from 120 features to 50 features using Principal Component Analysis [29]. Dynamic Bayesian Network (DBN) classifiers, which take into account the time history of signals over the entire stride, were trained [20] and evaluated according to their definitions in Table II using leave-one-out cross validation. Figure 3 shows an overview of the system architecture including trained mode transitions. Mode transitions which were highly unlikely to be encountered in real-time use (e.g., mode transition between ramp descent and stair ascent) were not allowed.
Table II. Ambulation mode classifier descriptions.
| Gait Phase | Classifier | Active in | Description | Number of Classes |
|---|---|---|---|---|
| Heel Contact | HC_LW | Level-ground Walking | Predicted steady state and the transitions from level-ground walking to stair and ramp descent | 3 (LW, RD, SD) |
| HC_SD | Stair Descent | Predicted steady state and the transitions from stair descent to level-ground walking | 2 (LW, SD) | |
| HC_RD | Ramp Descent | Predicted steady state and the transitions from ramp descent to level-ground walking | 2 (LW, RD) | |
| HC_ST | Standing | Predicted steady state and the transition from standing to stair descent | 2 (ST, SD) | |
| Mid-Stance | MST_SD | Stair Descent | Predicted the transition from stair descent to level-ground walking when the first step on level ground was with the prosthesis (e.g., on 3-step staircase) | 2 (LW, SD) |
| Toe Off | TO | Level-ground Walking, Ramp Descent, Stair Descent | Predicted steady state and the transitions from level-ground walking to stair ascent and between level-ground walking and ramp/stair descent | 4 (LW, RD, SA, SD) |
| TO_ST | Standing | Predicted steady state and the transition from standing to stair ascent | 2 (ST, SA) | |
| Mid-Swing | MSW_SA | Stair Ascent | Predicted steady state and the transition from stair ascent to level-ground walking when the first step on level ground was with the sound side (e.g., on 3-step staircase) | 2 (LW, SA) |
Gait Events, HC: heel contact; MST: mid-stance; TO: toe off; MSW: mid-swing;
Ambulation Modes, LW: level-ground walking; SD: stair descent; SA: stair ascent; RD: ramp descent, ST: stand
Fig. 3.
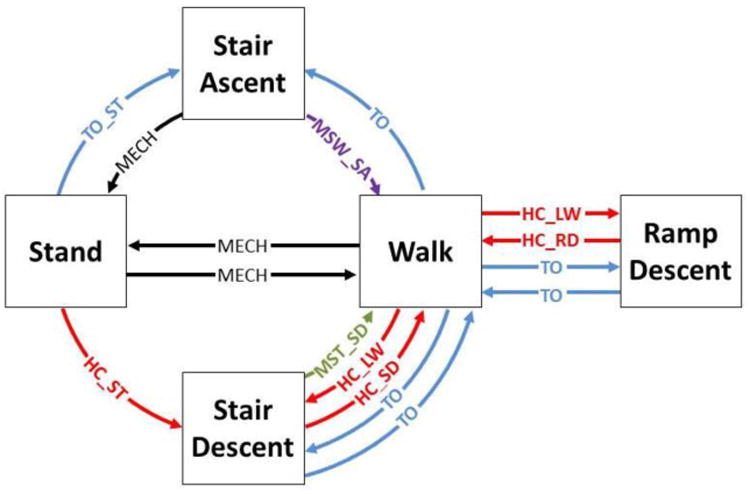
An overview of the mode-specific classifier architecture. State machine prosthesis modes are shown indicating the corresponding classifier (see Table 2 for descriptions) or mechanical trigger associated with each transition. Mechanical transitions are labeled in black, heel contact classifiers are in red, mid-stance classifier in green, toe off classifiers are in blue, and mid-swing classifier in purple. Ramp ascent data was grouped together with walking data.
Classifier performance in both the non-delayed and delayed system was evaluated using offline classification error. Classification error rates for each of the eight classifiers were calculated and averaged for each of the four main gait events (heel contact, mid-stance, toe off, mid-swing). Average error rates were then separated into steady state error—the percentage of steps that were misclassified when the user was not changing ambulation modes, and transition error—the percentage of steps that were misclassified when the user was transitioning between two ambulation modes. We performed a two-factor ANOVA to test for significant differences in error rates at each gait event. For each test, classification error rate was the independent measurement, subject was a random factor, and the delay condition (non-delayed, delayed) and type of error (steady-state, or transition) were fixed factors. An interaction term between delay condition and type of error was also included in the model.
System performance was evaluated by grouping the effect of each classification error. Since this study involved offline testing only, errors were grouped based on the effect they would have on user performance during an online test [25]. Errors that would have been noticeable but likely not impede ambulation (e.g., misclassifications at heel contact to ramp or stair descent during level-ground walking) were categorized as moderate perturbations and errors that would have greatly affected users' stability and would have required the experimenter to manually correct the error (e.g., misclassification at toe off to stair ascent during level-ground walking or misclassification at mid-stance to level-ground walking during stair descent) were categorized as substantial perturbations.
III. Results
All users were successful performing the instructed activities including climbing even- and odd-numbered step staircases, climbing stairs from a standing or walking approach, and approaching the ramp and staircase at various angles and walking speeds. Users did not notice the 90 ms mode transition delay at heel contact while transitioning between standing, level ground walking, ramp descent, and stair descent. There was a small noticeable delay for transitions that occurred at toe off (e.g., Stand to Stair Ascent), but this did not impede use of the powered prosthesis. Average stride time (i.e., heel contact to heel contact of the prosthesis) across all users and all modes was 1.97s [0.17s]. Therefore the 90 ms mode transition delay represented approximately 4.6% of the stride time. Figure 4 provides an example of the different data windows for a non-delayed vs. delayed system for a select number of mechanical sensors. There was additional class separation of mechanical sensor trajectories during the 90 ms delay window.
Fig. 4.
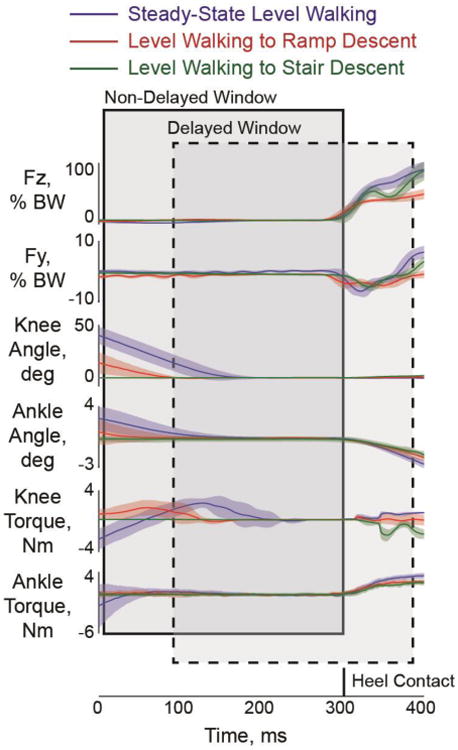
Example mechanical sensor data for the HC_LW classifier. The heel contact data window is shown for both the non-delayed and delayed system window for steady-state level-ground walking, level-ground walking to ramp descent transition and level-ground walking to stair descent transition. The delayed data window provides additional data after heel contact that is beneficial for separating classes.
For the Non-Delayed System, the complete system average error rate was 0.98% (Table III). The majority of error rates for the individual classifiers were below 2% except for the heel contact classifiers, of which the HC_RD classifier had an overall error rate of 6.8%. For the Delayed System, the complete system average error rate was 0.30%. All overall error rates for the individual classifiers were below 2%, The HC_RD classifier error rate was reduced to 0.86% in the Delayed System. The level-ground walking and ramp descent heel contact classifiers (HC_LW and HC_RD) showed the largest decreases in classification error for the delayed system compared to the non-delayed system, particularly due to the decrease in transitional errors.
Table III. Mode-Specific Classifier Error.
| Classifier | Complete System | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| HC_LW | HC_SD | HC_RD | HC_ST | MST_SD | TO | TO_ST | MSW_SA | ||
| Overall Error | |||||||||
| No. of decisions | 754 [96] | 112 [7] | 90 [14] | 511 [98] | 116 [12] | 1206 [97] | 634 [98] | 122 [3] | 3545 [420] |
| Non-delayed, % | 2.25 [1.75] | 0.76 [0.90] | 6.81 [4.60] | 0.16 [0.25] | 0.30 [0.47] | 0.40 [0.15] | 0.57 [0.24] | 1.37 [0.68] | 0.98 [0.39] |
| Delayed, % | 0.53 [0.38] | 0.92 [0.85] | 0.86 [1.65] | 0.16 [0.25] | 0.17 [0.40] | 0.19 [0.09] | 0.03 [0.06] | 1.39 [1.36] | 0.30 [0.10] |
| Steady-State Error | |||||||||
| No. of decisions | 723 [96] | 72 [6] | 67 [11] | 497 [102] | 106 [13] | 1095 [96] | 530 [102] | 111 [3] | 3182 [423] |
| Non-delayed, % | 1.97 [1.68] | 0.98 [1.28] | 3.53 [3.01] | 0.17 [0.26] | 0.15 [0.37] | 0.31 [0.13] | 0.44 [0.20] | 1.36 [0.51] | 0.78 [0.63] |
| Delayed, % | 0.44 [0.29] | 1.22 [1.19] | 0.54 [0.86] | 0.17 [0.26] | 0.19 [0.45] | 0.15 [0.10] | 0.03 [0.07] | 1.52 [1.49] | 0.27 [0.10] |
| Transitional Error | |||||||||
| No. of decisions | 31 [7] | 40 [2] | 23 [4] | 33 [6] | 11 [1] | 111 [4] | 104 [6] | 11 [1] | 363 [36] |
| Non-delayed, % | 8.46 [4.92] | 0.40 [0.97] | 16.75 [11.85] | 0 [0] | 1.52 [3.71] | 1.34 [0.73] | 1.27 [0.92] | 1.67 [4.08] | 2.65 [1.21] |
| Delayed, % | 2.76 [2.94] | 0.43 [1.05] | 1.67 [4.08] | 0 [0] | 0 [0] | 0.59 [0.46] | 0 [0] | 0 [0] | 0.55 [0.24] |
Gait Events, HC: heel contact; MST: mid-stance; TO: toe off; MSW: mid-swing
Ambulation Modes, LW: level-ground walking; SD: stair descent; SA: stair ascent; RD: ramp descent; ST: stand
Comparing across gait events, delaying classification decisions by 90 ms significantly reduced the mode-specific classification errors compared to the non-delayed system for decisions made at heel contact and toe off (p<0.001) (Table III). Transitional error rates were statistically higher than steady state error rates (p<0.001) (Figure 5). There was an interaction effect (p<0.01) indicating that there is a particular improvement for transitional error with the delayed system. No significant differences were found at mid-stance or mid-swing. The average error rate for all heel contact decisions (i.e., average of the HC_LW, HC_SD, HC_RD, and HC_ST classifiers) was 1.65% [0.99%] for the non-delayed system and 0.43% [0.23%] for the delayed system. The average error rate for all toe off decisions (i.e., the average of the TO and TO_ST classifiers) was 0.47% [0.16%] for the non-delayed system and 0.13% [0.05%] for the delayed system.
Fig. 5.
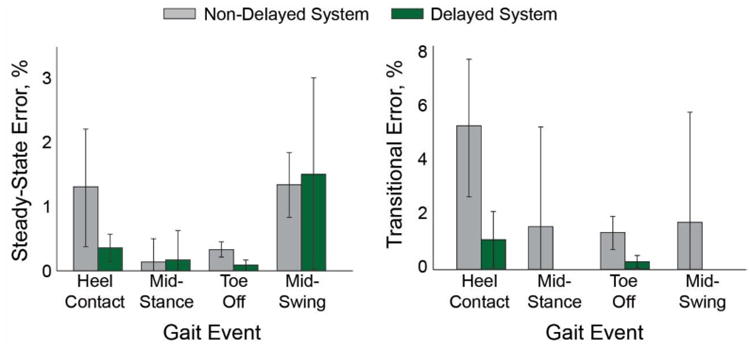
Average effect of non-delayed vs. delayed system on steady-state (left) and transitional (right) classification error. Heel contact error rates are the average of the HC_LW, HC_SD, HC_RD, and HC_ST classifiers. Toe off error rates are the average of the TO and TO_ST classifiers. Error bars indicate standard deviation. Note different vertical axis scaling between the left and right figures.
In terms of potential impact on the user, evaluating the system as a whole (i.e., the combined effect of all eight classifiers in combination with allowable mode transitions in the state machine) indicated that the majority of errors would have been of moderate consequence (i.e., users would notice them but did not considerably affect their balance) for both systems) (Table IV). The delayed system reduced errors that would have caused moderate or substantial perturbations compared to the non-delayed system.
Table IV. Classification Errors Grouped by the Perturbation to the User.
| User | No. of Decisions | Non-Delayed System | Delayed System | ||||||
|---|---|---|---|---|---|---|---|---|---|
|
| |||||||||
| Un-noticeable | Moderate | Substanti al | Total | Un-noticeable | Moderate | Substantial | Total | ||
|
| |||||||||
| TF1 | 3570 | 1 | 48 | 4 | 53 | 0 | 10 | 2 | 13 |
| TF2 | 3885 | 0 | 40 | 6 | 46 | 0 | 8 | 2 | 10 |
| TF3 | 3614 | 4 | 13 | 7 | 27 | 0 | 5 | 4 | 9 |
| TF4 | 3595 | 1 | 17 | 4 | 22 | 1 | 11 | 2 | 14 |
| TF5 | 3289 | 1 | 15 | 5 | 21 | 3 | 2 | 0 | 5 |
| TF6 | 3402 | 0 | 36 | 7 | 43 | 1 | 12 | 2 | 15 |
|
| |||||||||
| Counts Mean [SD] | 3545 [219] | 1 [1] | 28 [15] | 6 [1] | 35 [14] | 1 [1] | 8 [4] | 2 [1] | 11 [4] |
|
| |||||||||
| Percentage Mean [SD] | -- | 0.03 [0.04] | 0.79 [0.42] | 0.16 [0.04] | 0.98 [0.40] | 0.024 [0.033] | 0.23 [0.11] | 0.06 [0.036] | 0.31 [0.11] |
IV. Discussion
Users were able to successfully transition between all ambulation modes with ease and perform a wider variety of ambulation tasks than previously collected [14, 21] due to the enhanced state machine. With the addition of standing mode, all users could shift their weight with ease and remain confident that the knee will be stable and not buckle. Users transitioned between standing and walking mode when they desired on mechanical sensor data alone. This transition was not included as a separate class to the pattern recognition system because mechanical sensor thresholds and timers were sufficient to provide this seamless transition. With the addition of the standing mode heel contact and toe off classifiers, users could transition to stair ascent and stair descent from standing mode (something not available in our previous systems [20, 21]). Users could, if necessary, come to a stop before ascending/descending stairs or stop on a stair and then continue. Users commented on how they did not feel forced to approach the staircase in a certain way. They liked the flexibility to approach the staircase with a fast or slow speed, take long or short steps, and did not have to pace out their steps before reaching the first stair. The addition of the stair descent mid-stance and stair ascent mid-swing classifiers allowed users to successfully transition (ascending or descending) from an odd-numbered staircase to level-ground walking. Finally, with this flexible system, users were able to vary their speed and approach angles while still maintaining seamless transitions throughout the trials in the laboratory, hallway, and stairwell.
Even with increased variability, this data set with a non-delayed system resulted in improved accuracy rates compared to previous systems. Previous literature reports average error rates across five ambulation modes (level-ground walking, ramp ascent, ramp descent, stair ascent, stair descent), at 4.2% when using a DBN classifier with mechanical sensor data [21], 2% for steady-state and 20% for mode transitions in another similar study [20], and 2.1% for steady-state and 8.0% for mode transitions when a mode-specific classifier was incorporated [23]. This study's improved overall error rate for the non-delayed system of 0.99% (0.8% for steady-state and 2.7% for mode transitions) across five modes (standing, level-ground walking/ramp ascent, ramp descent, stair ascent, stair descent) was likely due to a few factors. This study included additional mechanical sensor data, specifically the 6-DOF load cell mounted between the knee and ankle and calculated thigh and shank inclination angles. The addition of these signals has been shown to significantly reduce error rates [13]. Also, in the previous systems there were a large number of misclassifications between the level-ground and incline walking classes. In this study they were treated as one class [28]. The mode-specific classification structure [23] has been shown to reduce errors over these previous systems. Another possibility for a reduction in error rate for our non-delayed system is the inclusion of feature reduction. Even with these improvements, transitional errors at heel contact for the non-delayed system remained high at an average over 5% (Figure 5).
Delaying classifier decisions by 90 ms following a gait event provided a significant reduction in errors over the non-delayed system's results. Overall classification error rates were reduced from 2.7% to 0.5% for transitions and 0.99% to 0.30% for steady state. To our knowledge, this is the first lower limb intent recognition system to reduce transitional errors for a powered knee-ankle prosthesis to under 1% for five modes. The reduction in error rates for the delayed system is likely due to further discriminating sensor data that appears immediately following a gait event (i.e., heel contact or toe off). Figure 4 demonstrates this qualitatively, as some of the mechanical sensor trajectories change following a gait event. Users and the prosthesis respond differently at heel contact during steady state walking, during the level ground walking transition to ramp descent, and during the level ground walking transition to stair descent. This small, 90 ms window of new data assisted in further separating the ambulation modes. While it is possible that delaying these decisions by more than 90 ms may further reduce error rates, much longer delays likely will have a negative impact on performance. Increased delays may be perceived by users as a functional delay (the 90 ms delay for toe off transitions was noticeable but did not impede users) or be past the critical timing in which the user's walking balance may be affected [24].
The delayed system reduced the amount of moderate and substantial system error rate (i.e., the errors that would have affected user performance if tested during real-time). The combination of the transitions allowed in the state machine and the mode-specific classifier architecture only allowed the relevant transitions out of the current locomotion. Therefore, misclassifications from ramp descent to any other mode except for level-ground walking (e.g., stair descent, stair ascent) were not possible in this system. Moderate errors, or errors that would be noticeable but not impede ambulation such as misclassifications between level-ground walking and ramp/stair descent (heel contact classifiers) and missed mode transitions from level-ground walking to stair ascent (toe off classifier) were reduced by a factor of 3. Substantial errors, or errors that had the potential to significantly affect users' stability such as misclassifications to stair ascent during steady-state level-ground walking (toe off classifier) and to level-ground walking during steady-state stair descent (mid-stance classifier) or steady-state stair ascent (mid-swing classifier), were also reduced by a factor of 3 with the delayed system compared to the non-delayed system. With the new addition of the mid-stance and mid-swing classifiers, these system errors likely affect users' stability in different ways than previously reported [19, 21, 25].
Although this study reports encouraging results for lower limb intent recognition of a powered knee-ankle prosthesis, there are limitations. The system still needs to be tested in real-time. We expect similar improvements for an online system since lower limb intent recognition systems have been shown to have carry over from offline to online performance [21]. Real-time results will allow us to evaluate how errors propagate through a delayed mode transition system. Previous work with a non-delayed mode transition system reported that when a step was misclassified, the subsequent steps were more likely to be incorrectly classified [21]. Future work may also include incorporating neural information from electromyography (EMG) data [15, 16, 19, 21]. In this study, error rates likely were already reduced due to the addition of mechanical sensors (6-DOF load cell, shank and thigh inclination angles) and a mode transition delay. EMG data may have the potential to further reduce these error rates, although to what extent is still unknown.
V. Conclusion
This study developed a flexible and more accurate lower limb intent recognition system by incorporating a mode-specific classifier with delayed mode transitions. Individuals with a transfemoral amputation successfully used a powered knee-ankle prosthesis to seamlessly transition between standing, level-ground walking, ascending/descending a ramp, and ascending/descending even- and odd-numbered staircases using a variety of approaches and speeds. The results demonstrate that delaying ambulation mode decisions (and thus delaying the prosthesis' mechanical response while transitioning between two different modes) by 90 ms significantly decreased prediction errors. Furthermore, this delay significantly reduced the amount of moderate and substantial system errors, thereby reducing the number of times a user's stability would be affected. The results of this study are encouraging and provide another step towards a clinically viable lower limb intent recognition system for a powered knee-ankle prosthesis.
Footnotes
This paper was submitted on March 29, 2016. This work was supported by the National Institutes of Health R01 HD079428-02 and the US Army's Joint Warfighter Program contract W81XWH-14-C-0105.
Contributor Information
Ann M. Simon, Rehabilitation Institute of Chicago, Chicago, IL, USA and the Department of Physical Medicine and Rehabilitation, Northwestern University, Chicago, IL.
Kimberly A. Ingraham, Rehabilitation Institute of Chicago, IL, USA. She is now with the Department of Mechanical Engineering and Human Neuromechanics Laboratory, University of Michigan, Ann Arbor, MI
John Spanias, Rehabilitation Institute of Chicago, Chicago, IL, USA and the Department of Biomedical Engineering, Northwestern University, Evanston, IL.
Aaron J. Young, School of Mechanical Engineering, Georgia Institute of Technology, Atlanta, GA
Suzanne B. Finucane, Rehabilitation Institute of Chicago, Chicago, IL
Elizabeth G. Halsne, Rehabilitation Institute of Chicago, IL. She is now with the Department of Rehabilitation Medicine, University of Washington, Seattle, WA
Levi J. Hargrove, Rehabilitation Institute of Chicago, Chicago, IL, USA and the Department of Physical Medicine and Rehabilitation, Northwestern University, Chicago, IL; Biomedical Engineering, Northwestern University, Evanston, IL.
References
- 1.Au S, Berniker M, Herr H. Powered ankle-foot prosthesis to assist level-ground and stair-descent gaits. Neural Networks. 2008;21:654–666. doi: 10.1016/j.neunet.2008.03.006. [DOI] [PubMed] [Google Scholar]
- 2.Sup F, Varol HA, Mitchell J, Withrow TJ, Goldfarb M. Preliminary Evaluations of a Self-Contained Anthropomorphic Transfemoral Prosthesis. IEEE ASME Trans Mechatron. 2009;14:667–676. doi: 10.1109/TMECH.2009.2032688. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 3.OSSUR. The POWER KNEE. The POWER KNEE, editor. http://bionics.ossur.com/Products/POWER-KNEE/SENSE.
- 4.Bellman RD, Holgate MA, Sugar TG. SPARKy 3: Design of an active robotic ankle prosthesis with two actuated degrees of freedom using regenerative kinetics. presented at the IEEE/RAS-EMBS International Conferernce on Biomedical Robotics and Biomechatronics; Scottsdale, AZ, USA. 2008. [Google Scholar]
- 5.Fey NP, Simon AM, et al. Controlling knee swing initiation and ankle plantarflexion with an active prosthesis on level and inclined surfaces at variable walking speeds. IEEE Journal of Translational Engineering in Health and Medicine. 2014;2:1–12. doi: 10.1109/JTEHM.2014.2343228. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 6.Sup F, Varol HA, Goldfarb M. Upslope walking with a powered knee and ankle prosthesis: initial results with an amputee subject. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 2011 Feb;19:71–8. doi: 10.1109/TNSRE.2010.2087360. [DOI] [PubMed] [Google Scholar]
- 7.Lawson B, Varol A, Huff A, Erdemir E, Goldfarb M. Control of stair ascent and descent with a powered transfemoral prosthesis. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 2013;21:466–473. doi: 10.1109/TNSRE.2012.2225640. [DOI] [PubMed] [Google Scholar]
- 8.Simon AM, Ingraham KA, Fey NP, Finucane SB, Lipschutz RD, Young AJ, et al. Configuring a powered knee and ankle prosthesis for transfemoral amputees within five specific ambulation modes. PLoS One. 2014;9:e99387. doi: 10.1371/journal.pone.0099387. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 9.Kannape OA, Herr HM. Volitional control of ankle plantar flexion in a powered transtibial prosthesis during stair-ambulation. Conf Proc IEEE Engineering in Medicine and Biology Society. 2014 Aug;2014:1662–5. doi: 10.1109/EMBC.2014.6943925. [DOI] [PubMed] [Google Scholar]
- 10.Varol HA, Sup F, Goldfarb M. Powered sit-to-stand and assistive stand-to-sit framework for a powered transfemoral prosthesis. IEEE International Conference on Rehabilitation Robotics. 2009;5209582:645–651. doi: 10.1109/ICORR.2009.5209582. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 11.Bellmann M, Schmalz T, Ludwigs E, Blumentritt S. Immediate effects of a new microprocessor-controlled prosthetic knee joint: a comparative biomechanical evaluation. Arch Phys Med Rehabil. 2012 Mar;93:541–9. doi: 10.1016/j.apmr.2011.10.017. [DOI] [PubMed] [Google Scholar]
- 12.Varol HA, Sup F, Goldfarb M. Real-time gait mode intent recognition of a powered knee and ankle prosthesis for standing and walking. IEEE/RAS-EMBS International Conferernce on Biomedical Robotics and Biomechatronics. 2009 Jan 27;2008:66–72. doi: 10.1109/BIOROB.2008.4762860. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 13.Spanias J, Simon AM, Ingraham KA, Hargrove LJ. Effect of additional mechanical sensor data on an EMG-based pattern recognition system for a powered leg prosthesis; Proc 7th International IEEE EMBS Neural Engineering Conference; 2015. pp. 639–642. [Google Scholar]
- 14.Young AJ, Simon AM, Hargrove LJ. A training method for locomotion mode prediction using powered lower limb prostheses. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 2014 May;22:671–7. doi: 10.1109/TNSRE.2013.2285101. [DOI] [PubMed] [Google Scholar]
- 15.Huang H, Kuiken T, Lipschutz R. A strategy for identifying locomotion modes using surface electromyography. IEEE Transactions on Biomedical Engineering. 2009 Jan;56:65–73. doi: 10.1109/TBME.2008.2003293. 2009. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 16.Huang H, Zhang F, Hargrove LJ, Dou Z, Rogers DR, Englehart KB. Continuous locomotion-mode identification for prosthetic legs based on neuromuscular-mechanical fusion. IEEE Transactions on Biomedical Engineering. 2011 Oct;58:2867–2875. doi: 10.1109/TBME.2011.2161671. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 17.Liu M, Wang D, Huang H. Development of an Environment-Aware Locomotion Mode Recognition System for Powered Lower Limb Prostheses. IEEE Trans Neural Syst Rehabil Eng. 2015 Apr 14; doi: 10.1109/TNSRE.2015.2420539. [DOI] [PubMed] [Google Scholar]
- 18.Krausz N, Lenzi T, Hargrove L. Depth Sensing for Improved Control of Lower Limb Prostheses. IEEE Trans Biomed Eng. 2015 Jun 22; doi: 10.1109/TBME.2015.2448457. [DOI] [PubMed] [Google Scholar]
- 19.Hargrove L, Simon A, Young A, Lipschutz R, Finucane S, Smith D, et al. Robotic leg control with emg decoding in an amputee with nerve transfers. New England Journal of Medicine. 2013;369:1237–1242. doi: 10.1056/NEJMoa1300126. [DOI] [PubMed] [Google Scholar]
- 20.Young AJ, Simon AM, Fey NP, Hargrove LJ. Intent recognition in a powered lower limb prosthesis using time history information. Annals of Biomedical Engineering. 2014 Mar;42:631–41. doi: 10.1007/s10439-013-0909-0. [DOI] [PubMed] [Google Scholar]
- 21.Hargrove LJ, Young AJ, Simon AM, Fey NP, Lipschutz RD, Finucane SB, et al. Intuitive control of a powered prosthetic leg during ambulation: a randomized clinical trial. Journal of the American Medical Association. 2015 Jun 9;313:2244–52. doi: 10.1001/jama.2015.4527. [DOI] [PubMed] [Google Scholar]
- 22.Varol HA, Sup F, Goldfarb M. Multiclass real-time intent recognition of a powered lower limb prosthesis. IEEE Transactions on Biomedical Engineering. 2010;57:542–551. doi: 10.1109/TBME.2009.2034734. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 23.Young AJ, Hargrove LJ. A classification method for user-independent intent recognition for transfemoral amputees using powered lower limb prostheses. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 2016 Feb;24:217–25. doi: 10.1109/TNSRE.2015.2412461. [DOI] [PubMed] [Google Scholar]
- 24.Zhang F, Liu M, Huang H. Investigation of Timing to Switch Control Mode in Powered Knee Prostheses during Task Transitions. PLoS One. 2015;10:e0133965. doi: 10.1371/journal.pone.0133965. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 25.Zhang F, Liu M, Huang H. Effects of locomotion mode recognition errors on volitional control of powered above-knee prostheses. IEEE Trans Neural Syst Rehabil Eng. 2015 Jan;23:64–72. doi: 10.1109/TNSRE.2014.2327230. [DOI] [PubMed] [Google Scholar]
- 26.Lawson B, Mitchell J, Truex D, Shultz A, Ledoux E, Goldfarb M. A robotic leg prosthesis: Design, control, and implementation. Robotics & Automation Magazine. 2014:70–81. [Google Scholar]
- 27.Simon AM, Spanias JA, Ingraham KA, Hargrove LJ. Delaying ambulation mode transitions in a powered knee-ankle prosthesis. Conf Proc IEEE Engineering in Medicine and Biology Society. 2016;2016 doi: 10.1109/EMBC.2016.7591869. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 28.Young AJ, Simon A, Hargrove LJ. An intent recognition strategy for transfemoral amputee ambulation across different locomotion modes. Conf Proc IEEE Engineering in Medicine and Biology Society. 2013;2013:1587–90. doi: 10.1109/EMBC.2013.6609818. [DOI] [PubMed] [Google Scholar]
- 29.Jolliffe IT. Principal component analysis. 2nd. New York: Springer-Verlag; 2002. [Google Scholar]